На сегодняшний день применение беспилотных летательных аппаратов (БПЛА) уже не кажется чем-то экзотичным. Сейчас производители БПЛА предлагают большой ряд моделей, в котором можно легко подобрать аппарат для определённых целей.
Применение БПЛА для нужд дорожных структур, да и в других отраслях, не носит пока массового характера и не особо регламентировано. Много проблем связано с использованием воздушного пространства, выделением частотного диапазона для управления БПЛА и передачи информации с борта на землю и наоборот и, наконец, с развитием рынка гражданских услуг, который сейчас находится в стадии становления. И все же сейчас уже ни у кого не вызывает сомнения, что использование БПЛА возможно и целесообразно – вопрос, скорее, в том, чем именно беспилотные летательные аппараты могут помочь различным отраслям.
На автотранспорте, в процессе получения оперативных и аналитических данных о состоянии автомобильных дорог такие устройства могут принести огромную пользу, поэтому их использование в данной индустрии не просто возможно – оно необходимо.
Тогда, повышение уровня безопасности и качества управления обстановкой на автомобильных дорогах в повседневной жизни и во время чрезвычайных ситуаций; а также обеспечение информированности пользователей ИТС, аварийных комиссаров, операторов Центров управлений и обычных участников движения о дорожных условиях на автомобильных дорогах может достигаться за счет своевременного получения видеоинформации об оперативной обстановке на дорогах, обеспечения возможности восстановления хода событий на основе анализа архивов информации, сокращения времени реагирования на происшествия и чрезвычайные ситуации. Для развития области применения БПЛА в сфере организации дорожного движения необходимо продумать систему организации полетов на постоянной основе [1].
Нормативные документы в сфере интеллектуальных транспортных систем (ИТС) ГОСТ Р 56829-2015 «Интеллектуальные транспортные системы. Термины и определения», ГОСТ Р 56294–2014 «Интеллектуальные транспортные системы. Требования к функциональной и физической архитектурам интеллектуальных транспортных систем», ГОСТ Р ИСО 14813-1 – 2011 «Интеллектуальные транспортные системы. Схема построения архитектуры интеллектуальных транспортных систем. Часть 1. Сервисные домены в области интеллектуальных транспортных систем, сервисные группы и сервисы», ОДМ 218.9.011-2016 Рекомендации по выполнению обоснования интеллектуальных транспортных позволяют вписать беспилотные летательные аппараты в архитектуру ИТС [2].
Так, беспилотные летательные аппараты могут являться элементом комплексной подсистемы ИТС управления состоянием дороги. Схема архитектуры проектов ИТС по управлению состоянием дороги представлена на рисунке 1.

Рис. 1. Схема архитектуры проектов ИТС по управлению состоянием дороги с применением БПЛА
Далее, беспилотные летательные аппараты могут являться элементом комплексных подсистем ИТС: Косвенного или динамического управления транспортным потоком; автоматизированного управления дорожным движением, их инструментальной подсистемы видеонаблюдения, детектирования ДТП и ЧС. Схема архитектуры таких проектов ИТС представлена на рисунке 2.
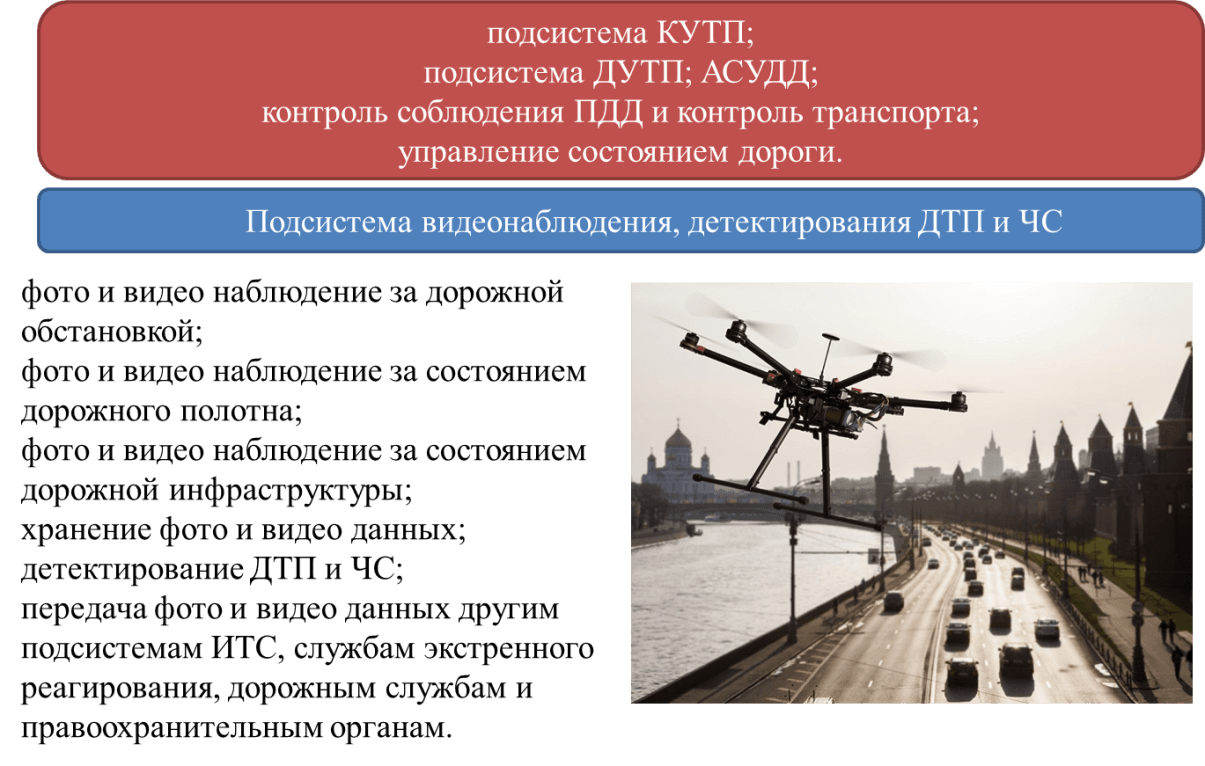
Рис. 2. Схема архитектуры проектов ИТС по косвенному управлению транспортным потоком; автоматизированному управлению дорожным движением с применением БПЛА
БПЛА могут являться элементом комплексной подсистемы ИТС контроля соблюдения ПДД и контроля транспорта.
Схема архитектуры таких проектов ИТС представлена на рисунке 2.3.

Рис. 3 Схема архитектуры проектов ИТС по контролю соблюдения ПДД и контролю транспорта с применением БПЛА
Для изучения применения БПЛА в сфере организации дорожного движения был проведен эксперимент на участке пр. Ворошиловского с пересечением ул. Седова в г. Ростов-на-Дону. На БПЛА была установлена видеокамера, период измерений составлял 20 минут.
По окончании эксперимента были получены видеоданные, оцифровка которых позволила определить интенсивность дорожного движения на участке. После чего, была разработана модель функционирования данного участка в программе AIMSUN.
После создания модели проведена полная проверка для выявления потенциальных ошибок на всех этапах создания и работы модели (рис. 4).
Для сравнения экспериментальных и расчетных данных целесообразно была использована U-статистика Зэйла. Во-первых, этот метод позволяет оценить изменение показателей по временным периодам и во-вторых, выявляет три источника расхождений. Главной статистикой Зэйла является коэффициент относительной ошибки:
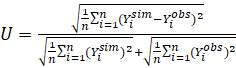 (1)
(1)
где U – статистика Зэйла;
 и
и  – соответственно экспериментальные и расчетные данные в i- й момент времени;
– соответственно экспериментальные и расчетные данные в i- й момент времени;
n – число наблюдений [3].

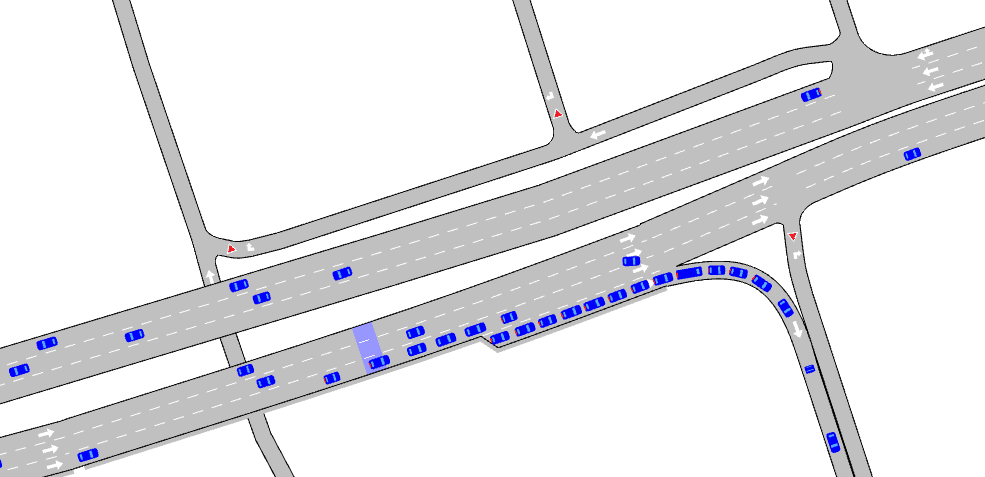
Рис. 4. Снимок состояния дорожного движения (сверху – от БПЛА, снизу – из модели в программе AIMSUN)
Значение главной статистики Зэйла составляет 0,53 и свидетельствует о существенных отклонениях между результатами моделирования и фактическими данными. Значит, калибровку модели необходимо продолжить.
Основным результатом работы является вписание БПЛА в проекты ИТС путем конструирования схем физической, функциональной архитектуры и архитектору индикаторов эффективности проекта. Предлагается применение БПЛА в качестве периферийного оборудования в проектах по управлению состоянием дороги, по косвенному или динамическому управлению транспортным потоком; автоматизированному управлению дорожным движением; контроля соблюдения ПДД и контроля транспорта.
Научной новизной выпускной квалификационной работы является совершенствование моделирования дорожного движения путем получения данных от БПЛА. Значение главной статистики Зэйла в созданной в выпускной квалификационной работе модели составляет 0,53 и свидетельствует о существенных отклонениях между результатами моделирования и фактическими данными.
