.png&w=384&q=75)
В аналитических моделях разработанных оценок уровня безопасности воздушного движения действия диспетчера учитывались предсказуемо [1], при этом полагалось, что разделение между воздушными судами точно соответствует норме эшелонирования. Как показали исследования, авиадиспетчер вынужден действовать в принужденном темпе, часто в условиях ограниченного времени. Такие особенности приводят к ошибкам в работе, несмотря на меры по улучшению информационного обеспечения, поэтому применительно к рассматриваемой задаче модель человека-оператора при управлении воздушным движением целесообразно представлять в теории вероятности. Качество профессиональной деятельности диспетчера будет определяться вероятностью возникновения ошибок, которые могут привести к нарушению эшелонирования.
Остановимся подробнее на определении вероятности потери управления воздушным судном (ВС) при ведении радиолокационного контроля.
Согласно [2, 3], существует зависимость вероятности ошибок оператора при изменении основного фактора «стресс» ‒ нагрузки управления (рис. 1). Эта зависимость построена с учетом, что вероятность ошибочных действий остается примерно постоянной до тех пор, пока уровень нагрузки не возрастет настолько, что наступает «стресс принятия решений» или катастрофическая потеря работоспособности.
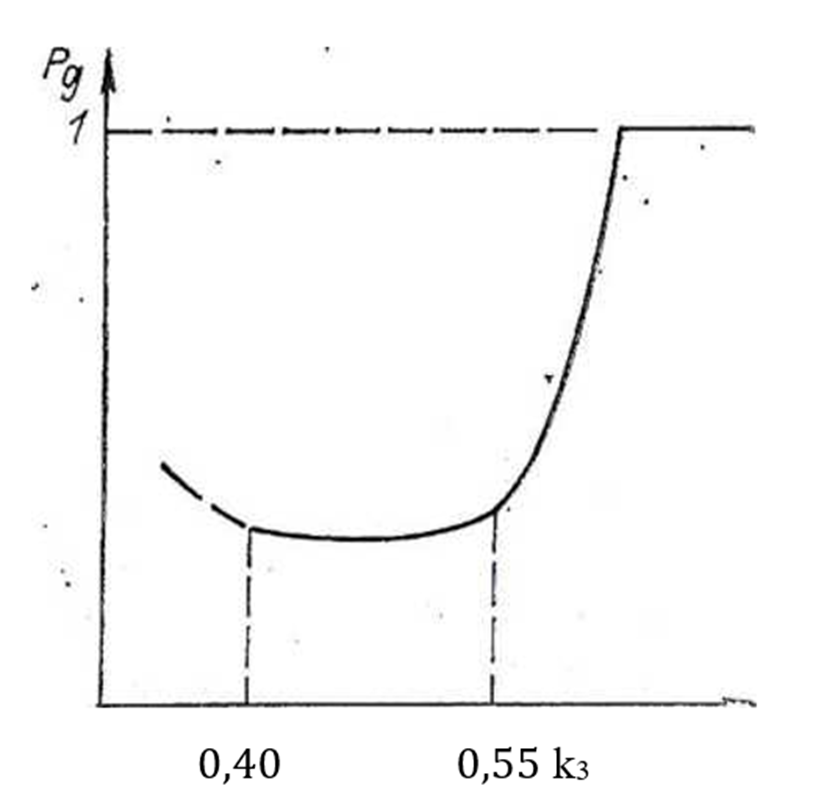
Рис. 1
Переходя к анализу количественных характеристик показателей деятельности авиадиспетчеров, отметим, что прямых данных, позволяющих оценить надежность их работы, в настоящее время нет. Основываясь на мнении экспертов, можно считать, что в диапазоне значений коэффициента загрузки 0,4 < k3 < 0,55, где ![]() , вероятность потери контроля над ВС можно оценить по формуле:
, вероятность потери контроля над ВС можно оценить по формуле:
![]() , (1)
, (1)
Где m ‒ экспертная оценка числа ошибок по контролю за ситуацией в смену;
![]() ‒ часовая интенсивность движения в секторе;
‒ часовая интенсивность движения в секторе;
Tраб – время работы диспетчера;
Тсм – время наблюдения диспетчера за воздушным судном;
k3 – коэффициент загрузки диспетчера;
Pg – вероятность потери контроля над ВС.
Предположим, что вероятность безотказной работы технических средств обслуживания воздушного движения (ОВД), куда входит диспетчерское [4], будет равно Ровд, тогда с позиций оценки безопасности воздушного движения модель системы ОВД с авиадиспетчером можно представить в виде схемы «надёжности» из двух элементов. Для расчета вероятностей введем ряд допущений:
- отказы элементов системы могут происходить в любые случайные моменты времени;
- состояние системы в данный момент времени не зависит от состояния в предыдущий момент.
Рассмотрим методику расчета риска столкновения при полетах по параллельным участкам трасс или коридорам подхода с учетом вероятности потери радиолокационного контроля за боковыми отклонениями ВС в направлении смежной трассы.
В данном случае вероятности возможных состояний системы определяются по следующим соотношениям:
![]() ‒ вероятность ведения контроля за боковыми отклонениями одного ВС;
‒ вероятность ведения контроля за боковыми отклонениями одного ВС;
![]() ‒ вероятность ведения контроля за парой ВС на смежных трассах;
‒ вероятность ведения контроля за парой ВС на смежных трассах;
![]() ‒ вероятность отсутствия контроля со стороны системы ОВД.
‒ вероятность отсутствия контроля со стороны системы ОВД.
Pрлк – вероятность ведения радиолокационного контроля;
Pg – вероятность потери контроля над ВС.
Общее уравнение оценки риска столкновения с учетом указанных состояний системы ОВД имеет следующий вид:
Где, ![]()
R0 – ожидаемая частота столкновений при отказе системы ОВД;
R1 ‒ ожидаемая частота столкновений, когда один из пары ВС контролируется системой ОВД;
R2 ‒ ожидаемая частота столкновений при правильной работе системы ОВД;
При отказе системы ОВД риск столкновения будет определяться только навигационными ошибками самолетовождения, топологией рассматриваемого участка воздушного пространства и интенсивностью воздушного движения.
При определении погрешностей самолетовождения принято, что диспетчер должен корректировать курс всякий раз, когда метка самолета на индикаторе РЛС выйдет за границу трассы Ly. Плотности распределений погрешностей самолетовождения, соответствующие трем состояниям системы ОВД и используемые для расчетов R0, R1 и R2, приводятся на рисунке 2.
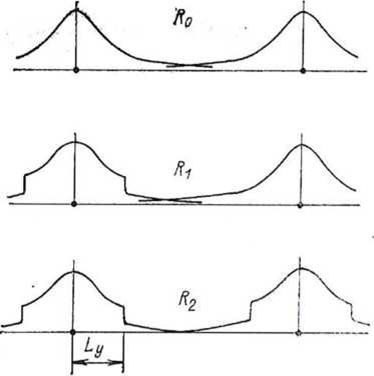
Рис. 2. Плотности вероятности ошибок самолетовождения с учетом радиолокационного контроля
Рассмотрим теперь вопрос обеспечения горизонтальное эшелонирования в точках схождения трасс. Установлено, что из-за стремления диспетчера к осторожности при решении вопросов безопасности полетов, дистанции между ВС обычно больше норм эшелонирования. При этом на основе опыта он способен оценить погрешности своих прогнозов и технических средств ОВД. Дистанцию SH, которую диспетчер старается обеспечить при расхождении воздушного судна, и которая с его точки зрения гарантирует отсутствие нарушений норм эшелонирования, можно представить в виде суммы:
![]() , (2)
, (2)
Где Sx – норма эшелонирования;
Sb – «буфферная» дистанция;
Можно показать, что если общая ошибка прогноза ситуации и механических средств распределения по нормальному закону со средним М и стандартным отклонением ![]() , то
, то ![]() . Величину R можно определить из следующего соотношения:
. Величину R можно определить из следующего соотношения:
![]() , (3)
, (3)
 , (4)
, (4)
Откуда получаем:
![]() , (5)
, (5)
Где 
Таким образом, для нормы эшелонирования Sx, ошибок радиолокационного контроля и прогноз стандартного отклонения при известном коэффициенте загрузки диспетчера можно вычислить условные вероятности вмешательства диспетчера в зависимости от фактической дистанции расхождения ВС.
Расчеты, проведенные по указанной методике, показали, что число вмешательств диспетчера увеличивается примерно в два раза по сравнению с моделями, где принято, что диспетчер обеспечивает плановое разделение между ВС, точно соответствующее норме эшелонирования.
