Принцип действия разрабатываемой системы будет представлен на примере одного из направлений, в котором данная технология может эффективно применяться. А именно регистрация движений пациента в реабилитационном экзоскелете. Технология поможет удалённо наблюдать за состоянием человека и ввести «цифрового помощника» - программу, обучающую пациентов выполнению реабилитационных упражнений с использованием экзоскелетной системы.
Разрабатываемый проект реабилитационного экзоскелета планируется использовать как для пациентов с полной потерей функций нижних конечностей, так и для пациентов проходящих посттравматическую реабилитацию. В первом случае это будет более сложная, как в техническом плане, так и в плане эксплуатации, система [4, с.515-524]. Научится использовать её, даже с рекомендациями специалиста, может быть затруднительно. Для второго случая это будет модульная реализация экзоскелетной системы, позволяющая при необходимости демонтировать часть модулей с целью уменьшения воздействия аппарата на пациента. Упор во втором случае будет делаться не на вертикализацию и прямохождение пациента, а на выполнение более сложного реабилитационного комплекса. Данный комплекс пациент постепенно сможет выполнять самостоятельно, но при условии внешнего контроля, который будет выполнять экзоскелетная система.
Решением для вышеперечисленных проблем может стать создание пассивного экзоскелета, подвижные звенья которого будут оборудованы датчиками углов поворота и линейных смещений. Такое решение можно сделать объединяемым с активной экзоскелетной системой, и датчики, используемые для регистрации движения пациента, станут съёмным модулем обратной связи.
Для реализации визуальной составляющей описанного выше процесса контроля была выбрана платформа на базе UnrealEngine 4, так как она зарекомендовала себя в схожих игровых проектах, а игровая составляющая при выполнении комплекса упражнений имеет место быть, так как имеет высокую вариативность исполнения и красочную визуальную составляющую, проста в освоении.
Стоит учитывать, что на данном этапе будет представлен лишь макет создаваемой системы.
Для отработки основных принципов и алгоритмов разрабатываемой системы был собран демонстрационный стенд (рис. 1). Стенд собран на базе ArduinoNano и включает в себя два энкодера (для регистрации изменения угла поворота) и электродвигатель (для демонстрации обратной связи).
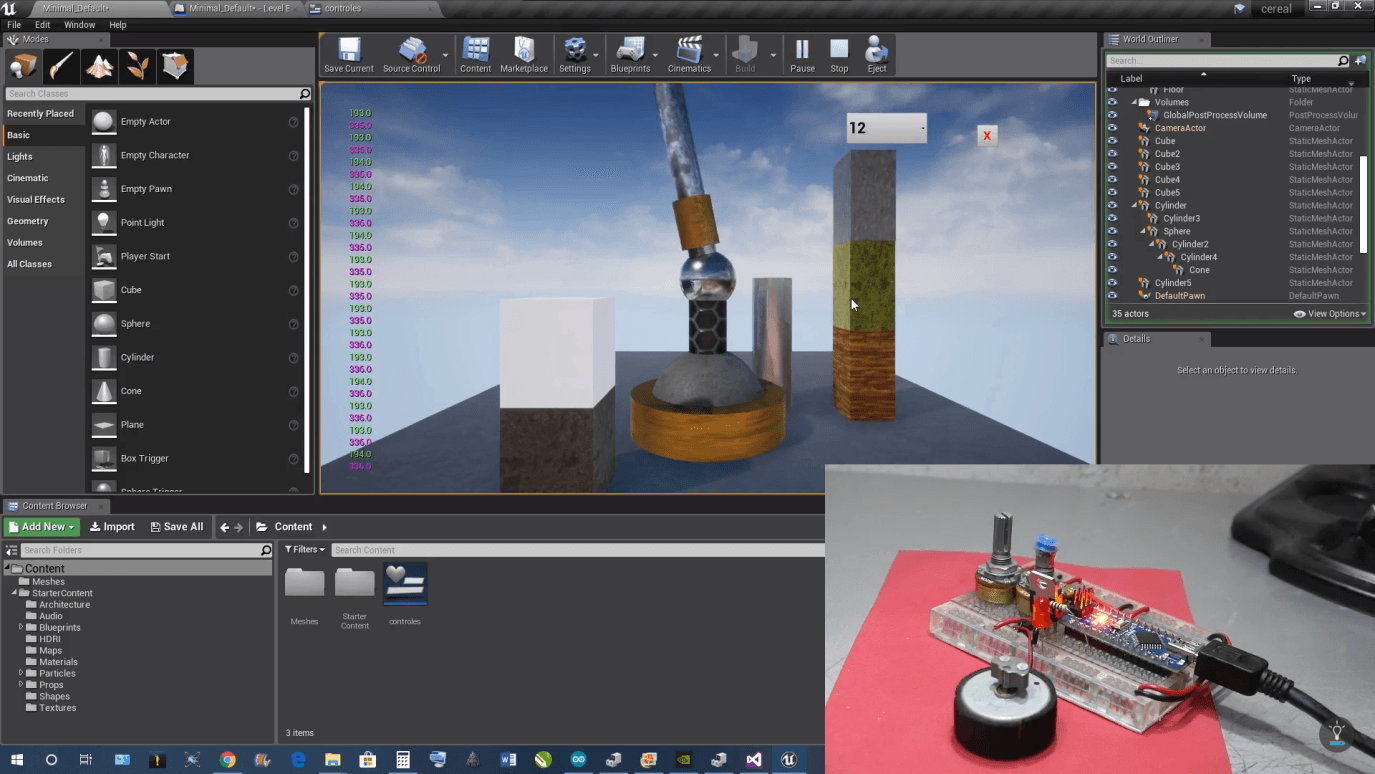
Рис. 1. Тестовый стенд и окно визуализации его работы
В качестве визуально составляющей был собран RR манипулятор, вращательные пары которого изменяют своё положение соответственно изменению углов поворота энкодеров. Электродвигатель изменяет своё положение в соответствии с изменением положения энкодера 1.
Схема сборки [1; 5, с.560-570] тестового стенда представлена на рисунке 2:
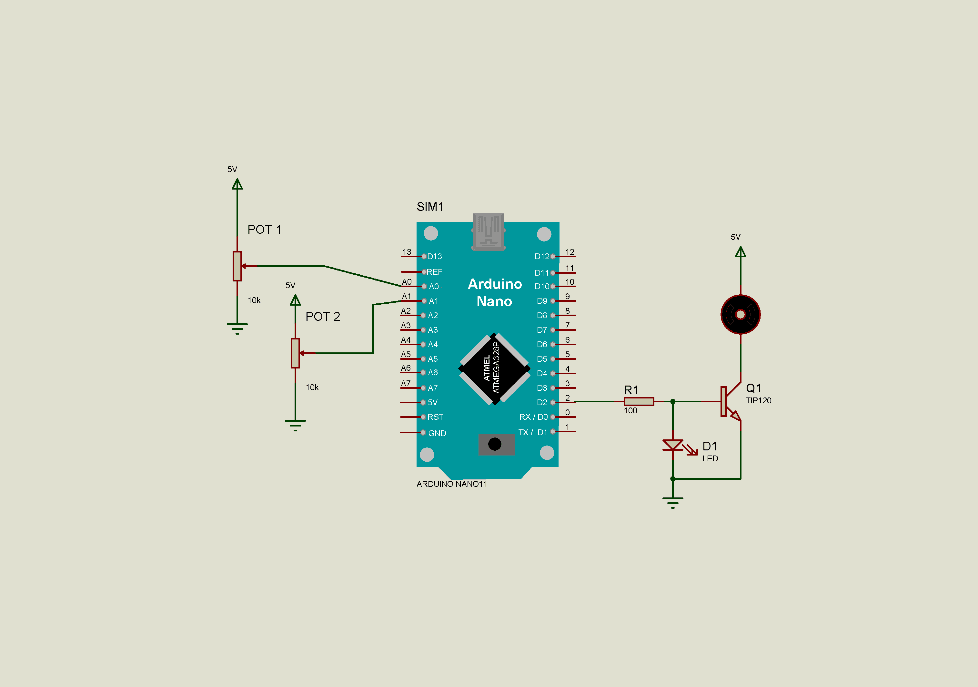
Рис. 2. Схема сборки тестового стенда
На рисунке 3 продемонстрировано рабочее окно программы [3].
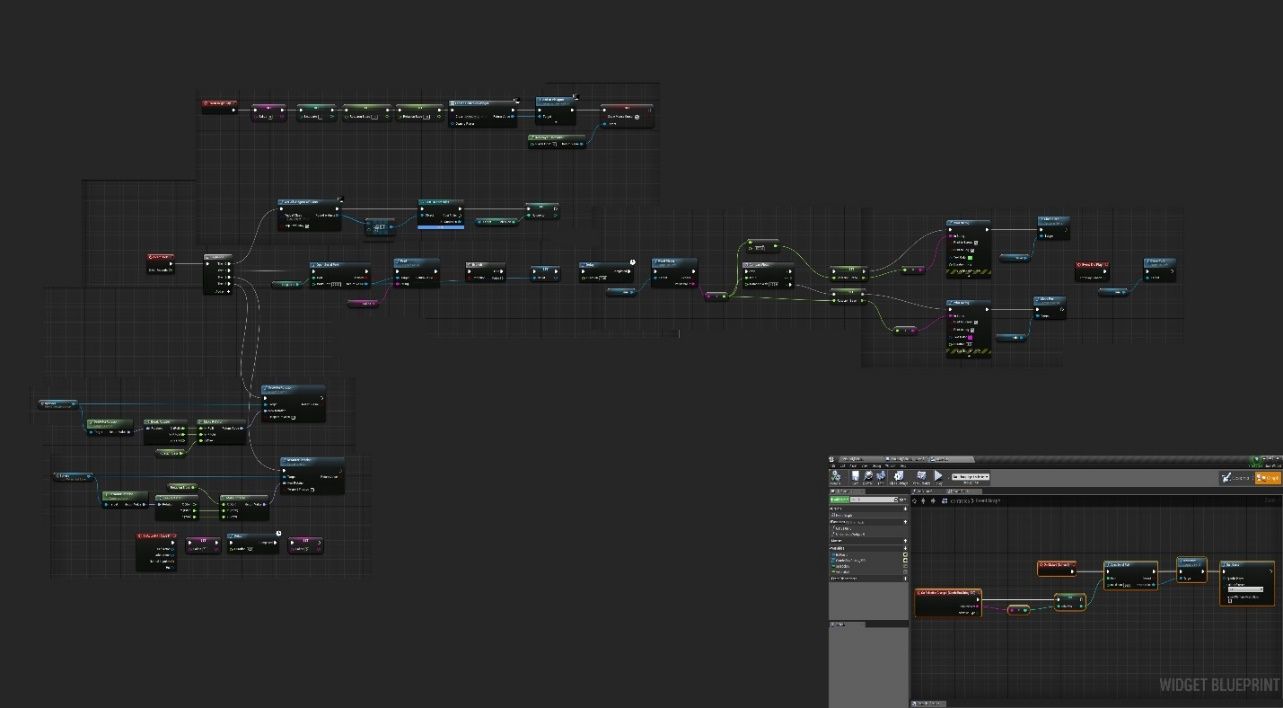
Рис. 3. Рабочее окно программы визуализации данных измерительной систем
В ранее представленных работах [2, с.228-231; 6, с.85-88; 7] уже демонстрировались возможности медицинского экзоскелета на примере реабилитационного аппарата ExoLite, также были представлены процессы снятия показаний измерительных систем аппарата. В данной же работе были продемонстрированы процессы визуализации показаний датчиков угла поворота. Комбинирование данных показаний дает возможность утверждать возможность создания разрабатываемой системы и эффективного её использования.
