
Лазерное сканирование – это метод определения пространственного положения объектов местности с помощью систем лазерного сканирования. Данный метод отличается высокой точностью, демонстрирует высокую надёжность и также он менее подвержен влиянию изменения в окружающей среде.
Благодаря своей универсальности и высокой степени автоматизации процессов измерений лазерный сканер является не просто геодезическим прибором, а инструментом оперативного решения широкого круга прикладных инженерных задач.
Основные этапы создания цифровой модели местности на основе применения мобильного лазерного сканирования представлены на рисунке 1.
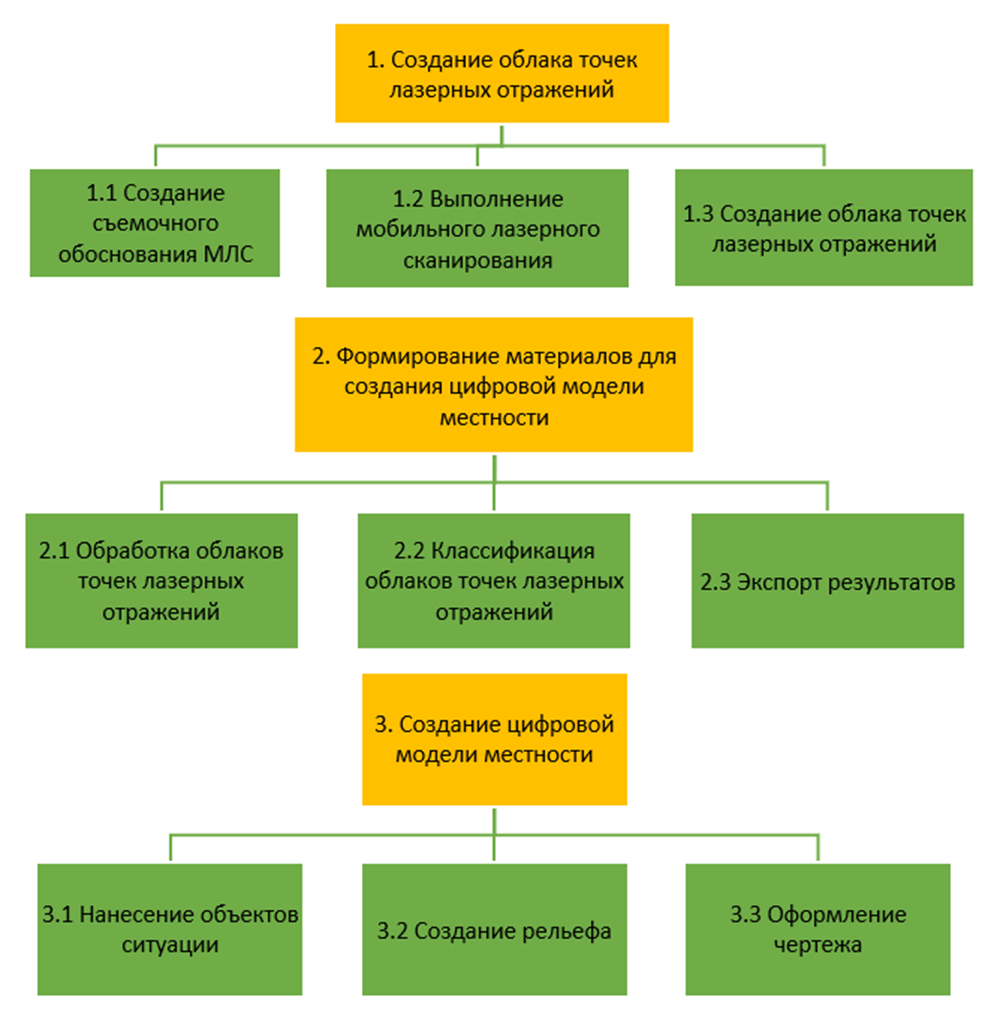
Рис. 1. Этапы создания цифровой модели местности на основе применения мобильного лазерного сканирования
1. Создание облака точек лазерных отражений
1.1. Создание съемочного обоснования
Для обеспечения привязки результатов лазерного сканирования к системам координат, повышения точности и контроля результатов лазерного сканирования требуется создание съемочной геодезической сети (СГС).
В первую очередь проводится рекогносцировочное обследование места производства работ с целью определения транспортной доступности объекта и траекторий движения системы МЛС, а также мест размещения пунктов ОГС и точек (КТ). Далее выполняется их закладка. В связи с отсутствием необходимости периодичной съёмки местности при выполнении кадастровых работ обычно используется временный тип закрепления пунктов. После закрепления пунктов СГС на них и на исходных геодезических пунктах производятся сеансы ГНСС наблюдений с применением спутниковой геодезической аппаратуры. Наблюдения выполняются статическим методом способом построения триангуляционной сети. Определение координат контрольных точек производится спутниковыми методами от пунктов СГС. Наиболее удобным и производительным методом для этого является кинематика в реальном времени (RTK).
Далее, в процессе камеральной обработки, выполняется обработка результатов полевых ГНСС измерений, уравнивание спутниковой геодезической сети, калибровка (локализация) системы координат и преобразование координат контрольных точек [1].
По результатам обработки формируются различные ведомости и каталоги координат, которые в дальнейшем будут использованы в обработке материалов МЛС и для формирования отчета по выполненным работам [2].
1.2. Выполнение мобильного лазерного сканирования
На этапе выполнения мобильного лазерного сканирования производится непосредственно сбор пространственных данных мобильного лазерного сканирования. В качестве сканирующей системы был выбран сканер GoSLAM RS100S. Принцип работы сканера заключается в автоматическом определении пространственного положения точек окружающих объектов и дальнейшем построении трёхмерной модели сканируемых окружающих объектов в виде массива точек. Перед началом полевых работ по МЛС необходимо подготовить предварительные траектории движения сканирующей системы. В качестве исходных данных для этого используются спутниковые снимки из открытых источников и результаты рекогносцировочного обследования объекта.
Полевая часть работ начинается с установки базовых станций на пункты съёмочной сети и настройки режимов их работы в зависимости от типа используемого оборудования. Далее подготавливается к работе система мобильного лазерного сканирования. Для этого она собирается в рабочее положение и устанавливается на заплечное крепление. Производится настройка требуемых режимов и проверка функционирования (рис. 2).

Рис. 2. Комплекс мобильного лазерного сканирования
Перед началом и в конце работ по сканированию выполняется процедура инициализации в соответствии с рекомендациями производителя системы лазерного сканирования.
1.3. Создание облака точек лазерных отражений
По завершению сбора пространственных данных осуществляется компьютерная обработка материалов с целью формирования облаков точек лазерных отражений и панорамных фотографий [3].
2. Формирование материалов для создания модели местности
2.1. Обработка облаков точек лазерных отражений
Особенностью технологии лазерного сканирования является возникновение шумов, вызванных как погодными условиями и факторами окружающей среды, так и спецификой работы оптической части лидара.
Таким образом, в облаке точек отражаются так называемые «шумы» и являются помехой для идентификации реальной поверхности объекта. Данная проблема в большей мере решается применением математической обработки на основании ряда алгоритмов. В результате удается отфильтровать точки «шума» и повысить точность результирующих материалов.
2.2. Классификация облаков точек лазерных отражений
После чего была произведена классификация облака точек лазерных отражений. Данный процесс представляет собой изменение класса точки по категориям. Сначала классификация выполнялась в автоматическом режиме, потом редактировалось вручную. Первым этапом выполнялась классификация облака по классу «земля». В этот класс были перенесены точки, которые относятся к рельефным точкам. В облаке восстановилось значительное количество точек, которые сканер снял через оконные проемы. Эти точки мешают определять контуры зданий. Соответственно они были перенесены в класс «здание» ручным методом. Далее в класс «деревья» переносились точки, относящиеся к древесно-кустарниковой растительности. В связи с тем, что применяемый комплекс МЛС с ошибками назначает цвета растительности, находящейся на фоне неба, данный этап выполнялся также ручным методом. Далее в отдельный класс, автоматическим методом, переносились точки, находящиеся на высоте от 20 см до 1.5 м от поверхности земли (относительно плоскости, построенной методом триангуляции по точкам класса «земля»).
Данные точки, в большинстве своем, относятся к нижним частям зданий, которые и необходимо отобразить на чертеже.
При построении 3Д модели объекта выяснилось, что точки, относящиеся к проводам и движущимся объектам (пешеходы и транспорт), создают не существующие объекты (артефакты), поэтому данные точки были отнесены в классы «провода» (автоматическим способом с ручной доработкой) и класс «машины» (ручным методом).
Результат классификации и фильтрации точек облака лазерных отражений представлен на рисунке 3.
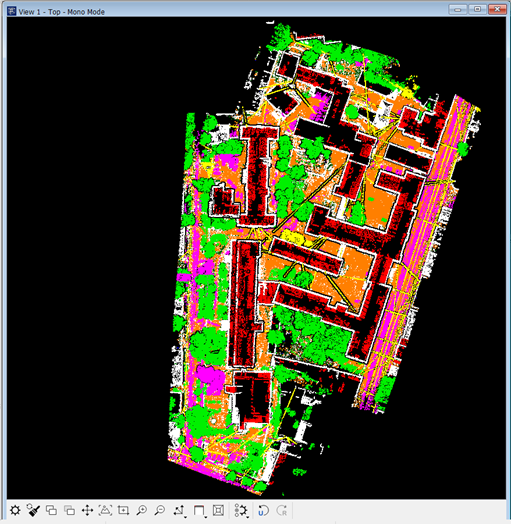
Рис. 3. Результат классификации ТЛО
2.3. Экспорт результатов
На этапе экспорта результатов лазерного сканирования подготавливаются материалы, которые будут использоваться в процессе создания цифровой модели местности (ЦММ). В зависимости от применяемого ПО и метода создания ЦММ, могут использоваться различные данные. В данное время самыми популярными форматами является LAS и GeoTIFF.
3. Создание цифровой модели местности
В программе «CREDO Топограф» план в масштабе 1:500 создается точечными, линейными и площадными топографическими знаками по заранее созданным векторам, созданным в программном обеспечении TerraScan. Каждый созданный объект отображается соответствующим условным знаком, который может автоматически изменяться в зависимости от масштаба отображения [4]. Кроме типа отображения для созданного объекта может вводиться семантика объекта. Состав семантики определяется в редакторе классификатора и может быть изменен, дополнен в соответствии с потребностями пользователя и конкретными задачами.
3.1. Нанесение объектов ситуации
Особенность техники создания планов состоит в том, что нанесение ситуации выполняется по слоям в определенном порядке, рассмотренном ниже.
Создание топографического плана начинается с нанесения площадных тематических объектов, таких как здания, сооружения и их части. Следующим этапом создаются линейные объекты ситуации. К ним относятся заборы, дороги, коммуникации. Далее происходит создание точечных тематических объектов, таких как отдельно стоящие деревья, дорожные знаки, столбы ЛЭП и т. д.
3.2. Создание рельефа
После нанесения ситуации создается поверхность рельефа по точкам класса «Земля». В результате создается сеть треугольников с вершинами в рельефных точках. Производится чистка рельефа, проставляются бергштрихи и подписи горизонталей.
3.3. Оформление чертежа
На заключительном этапе производится оформление чертежа, добавляется штамп, рамка и необходимые подписи.
