.png&w=384&q=75)
Введение
На сегодняшний день морская отрасль является одной из ключевых в глобальной экономике, она занимает свыше 80% объема всех мировых перевозок. Объем ключевых гражданских сегментов морской отрасли превышает 2,5 трлн долл. США в год: на первом месте – морская добыча полезных ископаемых (1,6 трлн долл. США), на втором – морской транспорт (500 млрд долл. США), далее рыбный промысел и производство аквакультуры (190 млрд долл. США), морской туризм (120 млрд долл. США) и судостроение (100 млрд долл. США). Предположительно, к 2030 году морская торговля по сравнению с нынешними показателями увеличится на 30% и достигнет 74 миллиарда тонно-миль. Это означает, что постоянно растёт интенсивность движения судов, что повышает риск морских аварий и инцидентов на море. При этом от 50% до 70% происшествий на море связаны с человеческим фактором и обходятся морским страховщиками в 1,5 млн долл. США в день. Это побуждает компании инвестировать в автоматизацию судовождения. Подсчёты показывают, что внедрение технологий искусственного интеллекта может повысить производительность транспортной и логистической отрасли более чем на 50% и одновременно устранить вероятность человеческих ошибок.
Развитие БПС-технологий на Европейском континенте
Впервые результаты в разработке БПС-технологий были получены в рамках проекта MUNIN (Морская беспилотная навигация с использованием интеллектуальных сетей). Его занимались в 2012–2015 годах девять компаний во главе с гамбургским Центром морской логистики.
В рамках этой пионерской работы формировалась концепция управления БПС и оценивались техническая, экономическая и правовая вероятности его реализации в предположении, что хотя бы на каком-то участке маршрута он будет использоваться в полностью автономном режиме. В результате проведенных исследований было установлено, что для управления БПС необходимо разработать следующие системы:
- Модуль навигационных датчиков, обрабатывающий их выходы, включая данные радара и АИС, а также дневных и инфракрасных видеокамер;
- Система навигации в глубоком море, обеспечивающая плавание по заданному маршруту, способная адаптироваться к ситуациям возможного столкновения со встречными объектами и к существенным изменениям погодных условий;
- Автономная система управления двигательной установкой, способная как минимум выявлять, если не предсказывать, возможные отказы системы движения, обеспечивая оптимальную эффективность ее использования;
- Береговой центр управления, предназначенный для непрерывного дистанционного управления БПС командой квалифицированных судоводителей и инженеров на тех участках маршрута, где экипаж будет отсутствовать (концепция предполагает снятие экипажа при выходе судна в открытое море и его возвращение с использованием вертолетов при подходе к участку со стесненным движением или порту).
Применительно к судну для перевозки навалочных грузов, в составе интерконтинентальной линии, где оно большую часть времени находится вдали от оживленных трасс, было установлено, что использование БПС в течение 25 лет приводит к экономии 7 млн $ по сравнению со стандартным навалочником. Одновременно было показано – вероятность столкновения такого судна в 10 раз меньше по сравнению с экипажным аналогом, прежде всего за счет практического устранения фактора усталости членов экипажа.
Дальнейшему развитию идей, сформированных в рамках проекта MUNIN, способствовало выполнение в 2015–2017 годах проекта AAWA (Advanced Autonomous Waterborne Applications Initiative – Инициатива использования продвинутых автономных плавсредств). Проект объединил усилия кластера разработчиков в составе Rolls-Royce (головной исполнитель), DNV GL, NAPA, Deltamarin и Inmarsat и ряда вузов (Университетов Тампере, Аалто, Турку и Академии Або) и Технического исследовательского центра VTT Финляндии. Кроме того, к проекту были привлечены паромный оператор Finferries и ведущий перевозчик сухогруза на Балтике ESL Shipping Ltd. Именно компания Finferries предоставила паром «Стелла» (Stella), курсирующий между островами Корпо (Korpo) и Хоутскер (Houtskär), для проведения испытаний, подтверждающих правомерность использования выбранных разработчиками средств.
В рамках проекта его разработчики искали ответы на три вопроса:
- Каковы должны быть технологии и как они должны взаимодействовать при автономном плавании судна в милях от берега?
- Как нужно спроектировать такое судно, чтобы оно было столь же безопасным, как и обычные суда, с какими новыми рисками мы столкнемся при этом и как их парировать?
- Каковы должны быть побудительные мотивы для судовладельцев вкладываться в БПС, и кто после их «легализации» будет ответственен в случае того или иного инцидента?
Результатом исследований, выполненных в рамках AAWA, явилось представление о том, что уровни автоматизации разнятся в зависимости от типа судна и специфики выполнения им тех или иных задач. В некоторых ситуациях, по мнению разработчиков, судно может управляться практически автоматически (прежде всего в открытом море), а в других – обязательно дистанционно управляться оператором. И одно дело управлять большим контейнеровозом, и совсем другое – навалочником.
Применительно к режиму автономного использования судна была предложена структура, состоящая из:
- модуля управления пропульсивной системой;
- системы динамического позиционирования (СДП);
- автономной навигационной системы (АНС);
- системы ситуационной оценки (ССО), содержащей все необходимые датчики и осуществляющей их комплексирование;
- системы обмена данными;
- системы, реализующей функции дистанционного оператора.
В свою очередь, в состав АНС входили следующие модули:
- планирования маршрута (отвечает лишь за предварительную его прокладку),
- предупреждения столкновений,
- ситуационной оценки (принимает решение по данным системы ССО),
- оценки состояния судна.
Важнейшим является «виртуальный капитан», обрабатывающий информацию, поставляемую остальными модулями АНС, а также СДП и другими аппаратными средствами судна. Именно этот модуль определяет режим использования судна и поставляет исходные данные для удаленного оператора.
Предполагается, что при обеспечении СДП данными от ГНСС, датчика ветра и инерциального измерительного модуля (ИИМ) она будет способна решить задачу позиционирования даже в тяжелых условиях плавания. Помимо этого, в ее функции входит обеспечение предупреждения столкновений, а также планирование текущего участка маршрута.
Тщательно анализировались датчики, способные решить задачи автономного плавания при их комплексировании с такими традиционными системами, как АИС, ЭКНИС, ГНСС и САРП, а кроме того, ИИМ, который никогда ранее не использовался на судах, плавающих под эгидой IMO. И тут на первые роли выдвинулись видеокамеры, работающие в видимом и инфракрасном диапазонах, радар и лидар.
К преимуществам первых из них относится возможность при использовании цветного изображения осуществлять сепарацию объектов на фоне морской поверхности. Если же поставить две такие камеры, то можно получить, пусть и в ограниченном объеме, трехмерное изображение. Да, при этом потребуются высокоэффективные средства обработки изображений и высокоскоростная широкополосная система передачи данных оператору, но это на текущий момент уже не является проблемой. Среди инфракрасных камер наибольший интерес вызывают те, которые работают в длинноволновом диапазоне 8–14 μm и обеспечивают видимость практически в полной темноте. Они же могут эффективно использоваться и в дневное время суток в условиях сильного тумана или дождя, когда камеры видимого диапазона пасуют.
К недостаткам видеокамер относятся не только зависимость их работоспособности от погодных условий, но и невозможность оценить расстояние до интересующего нас объекта, для этих целей служат радар и лидар. При этом выяснилось, что традиционно используемые на морском флоте радары S- и X-диапазонов не обеспечивают разрешающую способность, достаточную для решения задач, выполняемых автономным судном в припортовой зоне, и необходимы Ka- и W-диапазоны, применяемые в автомобильных приложениях.
Что касается лидара, хоть и подверженного влиянию погодных условий, то высокая эффективность его использования в морских условиях была подтверждена Хименесом (Jimenez) еще в 2009 году.
Наконец, исследовались вопросы оптимального применения существующих систем связи для обмена данными между судном и берегом с учетом парирования кибератак, влияющих на эксплуатацию именно БПС. С этой целью был создан специальный эмулятор, на котором исследовался процесс обмена данными через канал спутниковой системы связи с учетом сжатия видеоинформации и ее отбора в соответствие с тем или иным режимом работы системы в целом.
Следует отметить, что одновременно с научными исследованиями в рамках проекта AAWA с 2014 года Rolls-Royce вела работы по проектированию грузовых БПС. Оно осуществлялось применительно к контейнеровозам, с которых планировалось убрать капитанский мостик, надстройки, каюты для экипажа, системы водоснабжения, канализации и кондиционирования, а также оборудование электроснабжения. Это позволяет снизить вес судна на 5% и до 15% потребление топлива. Использование БПС обеспечит и сокращение расходов, связанных с содержанием экипажа во время плавания, которое для крупного контейнеровоза обходится в 3,3 тыс. $ в день, что составляет 44% от всех операционных затрат на перевозку грузов морем.
Практическое подтверждение идей AAWA проводилась Rolls-Royce в спарке с Finferries при выполнении проекта SVAN (Safer Vessel with Autonomous Navigation – безопасное судно с автономной навигацией), завершенного в 2018 г. В его рамках были проведены испытания, как утверждают разработчики, «первого в мире абсолютно автономного парома» Falco длиной 54 м, построенного в 1998 году.
В процессе этих испытаний, проводившихся полностью в автоматическом режиме около 400 часов среди островов к югу от Турку (Turku), была не только продемонстрирована высокая эффективность решения задачи расхождения, но и выполнена автоматическая швартовка. Размещенные на пароме датчики позволили создать картину окружающей обстановки с разрешающей способностью, недоступной человеческому глазу. Ее отображение транслировалось в центр дистанционного управления фирмы Finferries, находящийся в 50 км от Турку, оператор которого при необходимости мог вмешаться в управление паромом.
Первая в мире автоматическая швартовка была проведена компанией «Вяртсиля». Соответствующие испытания проводились на борту парома Folgefonn, принадлежащего норвежскому оператору Norled, в январе-апреле 2018 года. При этом позиционирование судна осуществлялось с использованием разработанной фирмой СДП по данным системы GPS, работающей в дифференциальном режиме. В случае отсутствия ее сигнала используется созданная «Вяртсиля» система контроля положения судна CyScan AS, опирающаяся на данные лидара.
В те же сроки, что и работы по проекту AAWA, силами отделения инженерной кибернетики Норвежского университета естественных и технических наук, с одной стороны, и норвежскими же компаниями Kongsberg Maritime, Maritime Robotic и DNV GL – с другой, выполнялся проект AUTOSEA, спонсируемый Исследовательским советом Норвегии и сфокусированный на решении задачи предупреждения столкновений применительно к БПС.
Решение задачи, обеспечивающее при расхождении выполнение требований COLREGs, осуществлялось с привлечением данных радара, АИС, лидара, ИИМ, видеокамер дневного и ночного видения и GPS. При этом учитывались неопределенности в оценке взаимного положения судов, данных датчиков, работы актуаторов СПС и намерений встречного судна. По завершении разработки СПС высокая эффективность ее использования была подтверждена в процессе испытаний в водах Норвегии и Нидерландов.
Развитием AUTOSEA явился проект Hull-to-Hull (H2H) («Корпус-к-корпусу»), исполнителями которого были фирмы Kongsberg Seatex, Sintef Ocean и Sintef Digital, Mampaey Offshore Industries и KU Lueven.
Целью этого проекта было обеспечить безопасное плавание в непосредственной близости от движущихся и неподвижных объектов, что создает предпосылки для продвижения разрабатываемых при этом продуктов и на БПС. Решение этой задачи базировалось на использовании показаний различных навигационных датчиков, и прежде всего ГНСС Galileo и региональной спутниковой навигационной системы EGNOS, а также на 3D-моделях конкретных БПС с приведением основных размерений судна. Такой подход позволяет прецизионно оценивать как расстояние до окружающих объектов, включая движущиеся суда, так и скорость сближения с ними. По существующим оценкам, для БПС погрешность определения этого расстояния не должна превышать нескольких дециметров, что предполагается обеспечить за счет комплексирования данных, получаемых от приемника ГНСС при работе в двухчастотном мультисистемном режиме, ИИМ, АИС, лидара, радара и видеокамер. Более того, как показания датчиков, так и 3D-модель БПС будут транслироваться окружающим судам.
В целом проект возглавлялся специалистами Kongsberg Seatex. Sintef Ocean и Sintef Digital осуществляли экспертизу принимаемых решений, университет KU Lueven оценивал их в части навигации на внутренних водных путях, а Mampaey Offshore Industries – в части буксировки, причаливания и швартовки. Координатор проекта Пер Эрик Квам (Per Erik Kwam) полагает, что по завершении H2H окажется возможным выполнение нестандартных маневров и процедур, удовлетворяющих, тем не менее, требованиям COLREGs.
Особое внимание разработчики проекта уделяют проблемам навигации именно БПС. Если последние будут рекомендованы для коммерческого использования, то к их оборудованию и реализуемым технологиям будут предъявлены жесточайшие требования по надежности и безопасности. Последнее предполагает наличие непрерывного обмена данными между взаимодействующими судами, реализуемого с помощью безотказного высокоскоростного канала, поддерживающего решение задачи относительного позиционирования объектов и передачу 3D-моделей. Разработка такого канала также проводится в рамках H2H.
При завершении проекта предполагаются демонстрационные испытания в Норвегии процедур взаимодействия БПС с традиционным судном, в Нидерландах – его швартовки, а в Бельгии – позиционирования такого судна на внутренних водных путях по данным ГНСС Galileo и EGNOS при различных внешних условиях.
Осуществление упомянутых ранее проектов побудило наконец и IMO обратить свое внимание на проблемы, возникающие при проектировании БПС. Последнее было определено IMO как «судно, которое в той или иной степени может функционировать независимо от человеческого участия» и получило название «морского автономного надводного судна» (Maritime Autonomous Surface Ship – MASS).
На заседании Комитета по безопасности плавания (Maritime Safety Committee – MSC) IMO, прошедшее в декабре 2018 года и посвященное в большей своей части проблематике БПС. Прежде всего каждое навигационное средство проверялось на возможность использования его на БПС по следующей цепочке критериев:
- применимо на БПС или невозможно использование на них;
- применимо на БПС и возможно использование на них при модернизации;
- применимо на БПС и возможно использование на них без доработок.
Одновременно была проведена классификация БПС по уровню их автономности, снимающая проблему, стоявшую перед разработчиками AAWA:
- тип 1 – судно автоматизировано, включая процедуру принятия решений, но на борту присутствует экипаж для приведения в действие бортовых систем и контроля выполняемых функций. Некоторые операции могут выполняться без участия человека;
- тип 2 – судно управляется дистанционно, но на борту имеется экипаж, опять-таки берущий на себя управление в критической ситуации;
- тип 3 – дистанционно управляемое судно без экипажа на борту;
- тип 4 – абсолютно автономное судно.
При этом, однако, было высказано мнение, что для реализации БПС, начиная с типа 3, потребуется недостижимый на сегодня уровень развития искусственного интеллекта.
К этой же проблеме обратилась и 101-я сессия MSC, проходившая в июне 2019 года. На ней рассматривался вопрос проведения испытаний БПС и было принято решение о том, что они должны быть организованы таким образом, чтобы уровень требований к характеристикам их навигации был по крайней мере не ниже, чем предъявляемый к обычным судам.
В 2019 году ЕС запустило два новых проекта, ориентированных на навигацию грузовых БПС при каботажном плавании и перемещении товаров по внутренним водным путям, что, естественно, сложнее плавания в открытом море. Первый из них – AUTO- SHIP предполагалось завершить в 2022 году, силами прежде всего фирмы Kongsberg с привлечением специалистов Ciaotech Srl (Италия), Blue Line Logistics (Бельгия), Sintef Ocean AS (Норвегия), Upm-Kymmeue Oyj (Финляндия) и Университета Стратклайда (University of Strathclyde, Великобритания).
В его рамках предполагается построить два судна, в процессе испытаний которых необходимо будет подтвердить, в том числе сокращение сроков и стоимости доставки товаров потребителям, что создаст конкурентную с наземным транспортом среду. Предполагается, что одновременно удастся снизить потребление топлива и упростить логистические процедуры, а также обеспечить кибербезопасность навигации.
Вторым проектом является AEGIS (на него выделено 7,5 млн евро), также выполняемый в течение трех лет консорциумом из 12 участников, представляющих Норвегию, Данию, Финляндию и Германию, во главе с компанией Sintef Ocean AS, участвующей и в AUTOSHIP. Аналогично ориентированный на разработку БПС-технологий для осуществления каботажного и интермодального плавания, он одновременно призван обеспечить снижение загрязняющих выбросов и шумности при речной навигации и на территории портов. По сути дела, ставится задача перенести доставку грузов с автомобильного и железнодорожного транспорта на водный, прежде всего речной, с использованием малых БПС, желательно на электрической тяге, и автоматизацией внутрипортовых и терминальных операций.
К новейшим достижениям Kongsberg, поглотившей в апреле 2019 года Rolls-Royce Commercial Marine и ставшей крупнейшим игроком на мировом рынке БПС, следует отнести следующие.
В феврале 2020 года Kongsberg Maritime совместно с Морским директоратом Норвегии и судовладельческой компанией Basto Fosen объявили о постановке на линию Хортен–Мосс (Horten–Moss) полностью автоматизированного, с адаптивным управлением парома Basto Fosen VI, который, полностью нагруженный пассажирами и автомобилями, совершил первое плавание в автоматическом режиме от причала до причала. Тем не менее команда на борту судна пока сохранена. Примечательно, что установленная на пароме система управления обеспечивает и решение важнейшей задачи, ставящейся в последнее время IMO, – своевременного прибытия в порт назначения. В процессе соответствующего испытания в декабре 2019 года Basto Fosen VI ошвартовался с опозданием лишь на 2 секунды! Только одна операция, выполняемая в процессе плавания, не доверена на текущий момент автомату – при необходимости выбрать маневр на расхождение со встречным судном решение принимает капитан.
Большой интерес вызывает проектирование Kongsberg совместно с заказчиком – фирмой Yara, проектантом судна Marin Teknikk (обе – Норвегия) и верфью VARD (Румыния) контейнеровоза-автомата Yara Birkeland на электрической тяге. Контейнеровоз этот длиной 80 м, развивающий экономичную скорость 6-7 уз. (максимальная – 15) и способный принять на борт 120 морских контейнеров, предназначен для доставки грузов с завода Yara в Порсгрунне (Porsgrunn) в порты Брейвик (Breivik, 7 морских миль) и Ларвик (Larvik). На первом этапе предполагается использовать экипаж, для чего на контейнеровозе установлен съемный мостик, а затем перейти к автоматическому режиму эксплуатации. В рамках исполняемого проекта разрабатываются также безоператорное оборудование «судно-причал» для разгрузки судна и погрузчики для обработки груза на причале.
«Интеллектуальное судоходство» (Smart Shipping) продемонстрировали возможности искусственного интеллекта при автоматическом управлении судном. В рамках проведенного в порту Роттердама эксперимента спроектированный Rotortug буксир Borkum осуществил в режиме БПС плавание по реке Ньиве-Маас (Nieuwe Maas), следуя оптимальным маршрутом, формируемым в реальном времени ПО, поставленным Captain AI и обеспечившим безопасную навигацию в одном из самых загруженных портов мира.
Объём рынка автономных судов растёт темпами порядка 7%–13% в год, и может превзойти объём в 12,5 млрд евро к 2030 году. При этом сегмент полностью автономных судов может расти темпами более 17%. Ключевые участники рынка автономных судов – компании ABB, Rolls-Royce, Wartsila, Kongsberg Gruppen, Rh Marine, L3 ASV и Siemens.
К началу 2000-х годов сложилась парадоксальная ситуация. На судах, кроме АИС, появились приемники глобальных навигационных спутниковых систем (ГНСС), электронные картографические навигационные информационные системы (ЭКНИС), средства автоматической радиолокационной прокладки (САРП), интегрированные мостиковые системы, системы управления движением судов и глобальная морская система связи при бедствии. Исследования, проведенные в 2000–2005 годах отделом изучения морских инцидентов Департамента транспорта Великобритании, показали, что с их появлением число морских инцидентов уменьшилось незначительно. Основной причиной большинства инцидентов на море являлся человеческий фактор.
Остро стоит и проблема комплектования экипажей судов. Так, неправительственная организация BIMCO, занимающаяся вопросами судоходной политики и объединяющая, в том числе судовладельцев и морских брокеров, прогнозирует нехватку к 2025 году 150000 специалистов морского профиля.
БПС в Российской Федерации
В России к развитию БПС-технологий в интересах торгового флота всерьез приступили лишь в 2016 году, когда в рамках Национальной технологической инициативы была сформирована рабочая группа и разработана дорожная карта «Маринет», одним из приоритетных направлений которой и явилось безэкипажное судовождение. Возглавила это направление компания «Кронштадт Технологии», взяв себе в помощники Крыловский государственный научный центр и упоминавшееся ранее НПП «АМЭ». В ноябре 2018 года генеральный директор отраслевого центра «Маринет» Александр Пинский уточнил, что на данном этапе под безэкипажным судовождением следует понимать автоматическое дистанционное управление движением судов.
В отличие от зарубежных разработок, предполагающих строительство БПС «с нуля», у нас решили идти другим путем – оснащать уже построенные суда необходимым комплектом аппаратуры. С этой целью в сентябре 2019 года Минпромторг заключил с той же компанией «Кронштадт Технологии» контракт на «разработку единой технологической платформы безэкипажного управления морскими судами коммерческого флота различного назначения», выделив 310 млн руб.
Ядро этой платформы составляет среда математического моделирования движения судов с учетом всех воздействующих на них факторов, их характеристик, в том числе при решении задачи расхождения в стесненных условиях. Важнейшими составными частями платформы также являются:
- среда трехмерной визуализации для придания наглядности процессу проведения испытаний судов;
- модуль реконструкции изображений и данных, получаемых сенсорами БПС с учетом погрешностей и шумов используемого оборудования;
- программный модуль алгоритмов управления БПС и его системами.
Вырабатываемые алгоритмами команды передаются модели БПС, что обеспечивает его перемещение в виртуальной среде, адекватное реальности. Эта технология, используемая при разработке БПС и его систем, позволяет резко сократить сроки их создания.
В марте 2019 году было объявлено, что эксперимент в рамках Национальной технологической инициативы готовится перейти в практическую фазу. В проекте участвуют:
- ПАО «Совкомфлот», которое выделило для этого танкер «Михаил Ульянов», курсирующий между Мурманском и платформой «Приразломная»;
- ООО «Пола Райз», предоставившее сухогруз «Пола Анфиса», плавающий в акватории Черного моря;
- ФГУП «Росморпорт», заявившее спарку из грунтоотвозной самоходной баржи «Рабочая» и земснаряда «Редут», ведущих дноуглубительные работы в порту «Кавказ».
Примечательно, что были выбраны суда трех типов, работающие в разных регионах страны. Только в этом случае окажется возможным проверить эффективность разрабатываемой компанией «Кронштадт Технологии» платформы. В ноябре 2020 года были оглашены данные о работах, ведущихся «Росморпортом». На земснаряде «Редут» установлен пульт дистанционного управления баржой «Рабочая», на которой, в свою очередь, установлен соответствующий комплект аппаратуры, разработанной в процессе создания единой технологической платформы. В процессе испытаний планируется отработать процедуру перемещения баржи от района дноуглубительных работ до отстоящего от нее на 30 км морского отвала. Вначале в режиме дистанционного управления, а со временем – и в автоматическом.
Поскольку важность перехода к эксплуатации БСП очевидна, 05.12.2020 было подписано постановление Правительства РФ о проведении до 31.12.2025 экспериментов по эксплуатации БПС в 11 регионах страны. По их результатам предполагается организация Минпромторгом производства устанавливаемых на судах систем дистанционного и автоматического управления.
Для испытаний БПС были созданы тестовые акватории на Ладожском озере (площадь около 70 кв. м) и в акватории Невы. В создании участвуют Государственный университет морского и речного флота имени адмирала С. О. Макарова и Администрация Волго-Балтийского бассейна.
В октябре 2020 года прошел «круглый стол» «Морские суда без экипажей – реальность и перспективы», на котором обсуждались вопросы юридического и технического характера. В докладах получили отражение взгляды самых различных специалистов-юристов, судоводителей, технических работников. Участие в круглом столе приняли свыше 50 человек из Москвы, Сант-Петербурга, Керчи, Мурманска и других городов России.
e-Навигация в России
В России сейчас реализуются два связанных между собой проекта в области е-Навигации. В рамках федеральной целевой программы Министерства транспорта «Поддержание, развитие и использование системы ГЛОНАСС на 2012–2020 годы», утвержденной постановлением правительства РФ от 03 марта 2012 г. № 189, предусматривается создание физической инфраструктуры пилотной зоны е-Навигации в восточной части Финского залива. Запланированы технические и организационные меры для создания физической инфраструктуры е-Навигации в акватории тестовой зоны: установка консолей для размещения АРМ е-Навигации, установка компьютеров, модернизация сети передачи данных, установка судовых картографических систем, поставка планшетов для персональных лоцманских комплектов и другое. В рамках Национальной технологической инициативы реализуется проект разработки технических средств е-Навигации, направленный на опережающее создание решений и технических стандартов в этой области российскими компаниями. Направление е-Навигации признано приоритетным рыночным сегментом плана мероприятий (дорожной карты) «Развитие рынка/отрасли МариНет». Реализация проекта должна позволить технологиям, разработанным отечественными компаниями, занять лидирующее положение на мировых рынках, а также обеспечить России одно из ведущих мест в создании информационной среды и стандартов е-Навигации.
е-Навигация – это единая информационная среда и инструменты, соединяющие всех участников морской отрасли: от судоводителей до операторов СУДС, от судоходных компаний до служб поиска и спасания, от портов до провайдеров ИТ-услуг, от таможенных служб до гидрографических организаций – для оперативного и полного обмена информацией. В качестве технологической основы е-Навигации предлагаются технологии «Интернета вещей»: протоколы и программные средства межмашинного взаимодействия (М2М). Однако для практической реализации е-Навигации необходимо грамотно применять эти технологии именно для морской навигации, морского транспорта.
Инфраструктуру е-Навигации можно определить как комплекс средств, направленных на повышение безопасности и эффективности в морской и речной отрасли за счет применения следующих современных технологий:
- мониторинга, контроля и управления (диспетчирования) судов с использованием комплекса систем бортовой автоматической идентификации, систем берегового наблюдения и космических систем мониторинга;
- инфраструктуры эффективного и прямого информационного обмена между участниками отрасли – судами, портами, береговыми властями, судоходными и логистическими компаниями и т. д. – на основе стандартизированных информационных и коммуникационных технологий и единых стандартов обмена информацией и документооборота;
- интеллектуальных интегрированных бортовых систем, способных автоматически взаимодействовать с системами других участников e-Навигации, обеспечивающих максимальный уровень автоматизации судовождения как инструмента снижения рисков, связанных с человеческим фактором, несогласованности действий и повышения эффективности;
- эффективных портовых систем, обеспечивающих быстрое и унифицированное прохождение грузов и обеспечение судов портовыми сервисами на основе единых стандартов электронного документооборота и гармонизированных таможенных процедур.
На примере проекта «Создание пилотной зоны е-Навигации и разработка технических средств е-Навигации» в рамках национальной технологической инициативы можно выделить следующие технические блоки инфраструктуры е-Навигации (рис. 1):
Технологии коммуникаций и обмена данными:
- наземные (3G/4G, WiMax, AIS);
- спутниковые (Iridium, VSAT);
- защита каналов связи судно – берег.
Передача данных с борта судна на берег:
- навигационные данные в реальном времени;
- накопленные данные;
- отчеты.
Передача с борта судна на берег и обратно информации о маршрутах следования судна:
- планируемый маршрут движения судна или передача с борта судна на станцию берегового слежения и на другие суда;
- рекомендуемый маршрут для плавания в прибрежных водах и захода в порт или передача со станции берегового слежения на борт судна;
- краткосрочная предсказанная траектория движения судна или передача с борта судна на станцию берегового слежения и на другие суда.
Передача информации о навигационной обстановке со станции берегового слежения на борт судна:
- цели СУДС;
- информация о безопасных фарватерах.
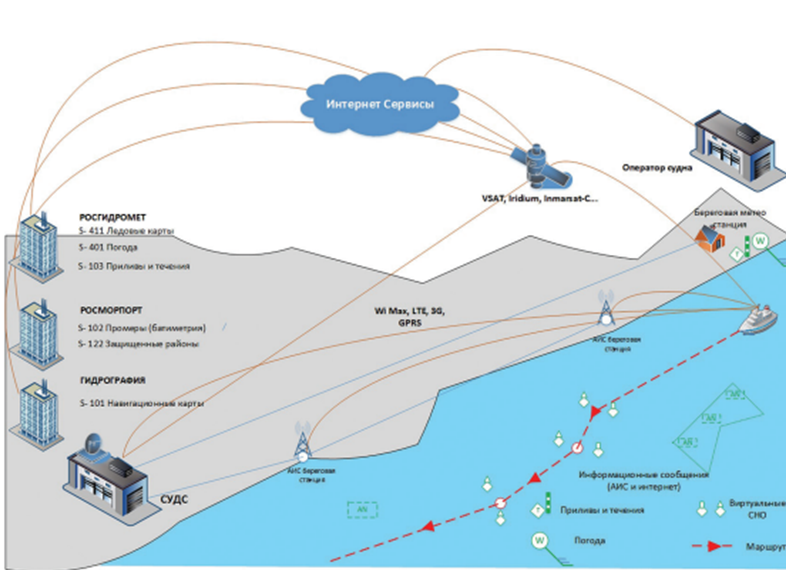
Рис. 1. Пример архитектуры пилотной зоны e-Навигации IT-технологии № 4 (65) 2016 «Транспорт Российской Федерации»
Гидрографическая, гидрологическая и метеорологическая информация или передача с берега на борт судна:
- подробные электронные навигационные карты для захода в порт;
- электронные карты промеров морских глубин;
- электронные карты ледовой обстановки.
Контроль судов:
- контроль навигационной безопасности;
- мониторинг и управление тревожными сигналами, поступившими с судна;
- контроль соблюдения правил по защите окружающей среды.
Сбор и передача информации о работе судовых систем автоматики, двигателей, о расходе топлива и выбросах загрязняющих веществ для предоставления в систему контроля состояния судов или передача с борта судна на берег.
Предоставление информации о работе портовых служб. Данный проект впервые в мире должен объединить все компоненты е-Навигации для практической реализации на основе существующих средств морской навигации. В зоне пилотного проекта развернута и успешно эксплуатируется ФГУП «Росморпорт» региональная система безопасности мореплавания в восточной части Финского залива, в составе которой региональная система управления движением судов с разветвленной сетью подключенных радиолокационных постов и субцентров управления, центр управления глобальной морской связью при бедствии с сетью базовых радиостанций.
ФГУП «Росморпорт» предоставляет в районе предполагаемой пилотной зоны е-Навигации услуги лоцманской проводки судов, ледокольные услуги, а также выполняет обслуживание средств навигационного обеспечения. Таким образом, в районе пилотной зоны е-Навигации существует уникальная по сравнению с зарубежными аналогичными проектами возможность разворачивания и комплексного тестирования одновременно берегового, бортового и лоцманского сегментов инфраструктуры с исключением возможного негативного влияния межведомственных барьеров.
Безэкипажное судовождение
Безэкипажное судовождение – еще одна инициатива ИМО, реализация которой тесно связана с е-Навигацией. Для автоматизации судовождения необходима развитая информационная инфраструктура, чтобы обеспечить системы навигации необходимой и своевременной информацией и предоставить безэкипажному судну возможность взаимодействовать с другими участниками судоходства. Уменьшение численности экипажа на судах вследствие автоматизации происходит на протяжении нескольких десятилетий. Предпосылками для этого служат развитие технологий, с одной стороны, и влияние человеческого фактора – с другой. Как и на других видах транспорта, на морском транспорте человеческий фактор выступает основной причиной инцидентов.
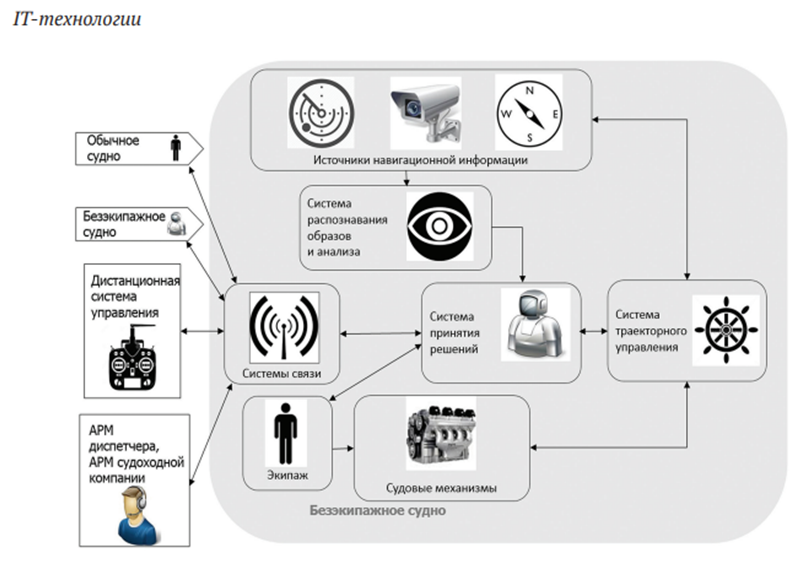
Рис. 2. Принципиальная схема управления безэкипажного судна
В России разработка технологий безэкипажного судовождения – преимущественно IT-технологии двойного назначения – ведется в отношении небольших судов (научно-исследовательских, спасательных), в частности, ФГУП «Крыловский государственный научный центр» и АО «Концерн «Моринформасистема-Агат». Однако наибольшее значение имеет разработка технологий, применимых именно к коммерческому морскому транспорту. Это заявлено как одна из целей национальной технологической инициативы, в рамках которой Россия должна получить приоритет в создании и применении технологий безэкипажного судовождения гражданского назначения. В качестве первого шага для создания технологий безэкипажного судовождения запланирован проект «Компьютерное моделирование безэкипажного судовождения» (рис. 2). Он ориентирован на комплексную отработку решений для безэкипажных судов, а также на подготовку изменений национальной и международной нормативно-правовой базы. Очевидно, что проведение исследований в этой области методом проб и ошибок на реальных судах крайне опасно, дорого и потребует очень длительного времени вследствие редких экстремальных ситуаций (тумана, шторма, отказа оборудования и др.). Предполагается создать виртуальную среду, в которой судоводители и эксперты смогут безопасно и экономически эффективно отрабатывать технологии безэкипажного судовождения, включая взаимодействие с обычными судами и навигационной инфраструктурой. По результатам этой работы предполагается оснащение разработанными техническими средствами судов и пилотной зоны е-Навигации, где будут проводиться физические испытания безэкипажных судов. Таким образом, в двух ключевых направлениях развития информационных технологий морской отрасли Россия имеет возможность не только создать конкурентоспособные решения, но и стать лидером в их разработке и применении. Успешная реализация упомянутых проектов в области е-Навигации и безэкипажного судовождения должна открыть российским компаниям возможности опережающего внедрения и коммерциализации новых технологий на мировом рынке.
В начале марта 2022 года делегация РУТ (МИИТ) с рабочим визитом посетила Санкт-Петербург.
В рамках поездки состоялись переговоры с компаниями АО «Ситроникс КТ» и ООО «НПК «Морсвязьавтоматика» по стратегическому проекту «Электронная навигация и безэкипажное (автономное) судовождение», реализуемого в рамках программы «Приоритет 2030».
Компания «Ситроникс» обладает уникальными технологиями и занимается сборкой и испытанием тренажерных комплексов для различных образовательных центров. Делегация осмотрела прототипы оборудования для управления судами 1 и 2 уровня автономности.
Стороны заключили соглашение и наметили пути сотрудничества в рамках стратегического проекта по автономному судовождению.
Выводы
Изученный в процессе освоения программы академической мобильности материал позволяет сделать вывод о том, что безэкипажное судовождение в ближайшие годы, может быть, внедрено на ограниченных акваториях с большим количеством дублирующих систем связи, береговых станций и других технических средств, позволяющих гарантировать полную безопасность судовождения.
Нашим предложением по внедрению систем безэкипажного судовождения будет предложение по разработке систем БЭС при организации пассажирских перевозок в мегаполисе на электросудах. При этом м. б. использованы базовые станции расположенные по берегам реки, что значительно повысит точность определения динамического позиционирования судна.
