Проектирование современных систем подрессоривая транспортных средств (ТС) требует от конструкторов согласования противоречивых требований: обеспечения высокой плавности хода ТС и обеспечения высокой устойчивости в совокупности с хорошей управляемостью транспортного средства. Решение вопроса совмещения противоположных требований к проектируемым системам подрессоривания еще не закрыто, что делает данную тему исследований актуальной и по сей день.
Целью работы является исследование алгоритмов управления упругодемпфирующими элементами полуактивных систем подрессоривания.
Одним из решений проблемы совмещения высокой плавности хода ТС и высокой устойчивости в совокупности с высокой управляемостью является использование полуактивных систем подрессоривания. Полуактивная система подрессоривания – система подрессовривания, в которой возможно управление упругими и/или демпфирующими свойствами [1, с. 37]. Эффективность работы управляемой полуактивной системы подрессоривания во многом определяется используемым алгоритмом управления. Базовыми принципами управления демпфирующим элементом полуактивной системы подрессоривания являются алгоритмы: Skyhook (SH), Groundhook (GH), Hybrid (SH – GH) [2, с. 28]. Схемы выше представленных алгоритмов управления приведены на (рис. 1).
Csky и Cground – коэффициенты демпфирования; Mb – подрессоренная масса; Mw – неподрессоренная масса; Ks – жесткость системы подрессоривания; Kt – жесткость колеса (катка); Xb – вертикальное перемещение подрессоренной массы; Xw – вертикальное перемещение неподрессоренной массы; Xr – воздействие рельефа
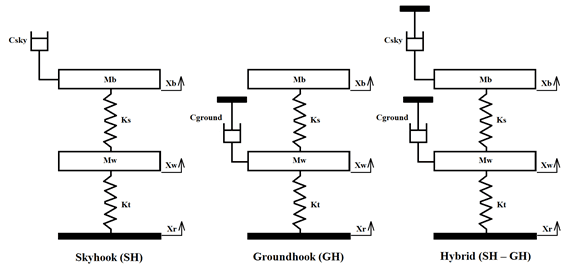
Рис. 1. Схемы алгоритмов управления
Алгоритм управления SH сводится к минимизации разницы между усилием в демпфирующем элементе, соединяющем подрессоренную и неподрессоренную массы и усилие теоретического демпфера, соединяющего подрессоренную массу с неподвижным телом («небом»). Закон изменения коэффициента демпфирования полуактивной системы подрессоривания под управлением алгоритма SH может быть описан системой неравенств:

где: Cmax и Cmin - максимальный и минимальный коэффициенты демпфирования соответственно.
Имитационная модель полуактивной системы подрессоривания ¼ ТС под управлением алгоритма SH представлена ниже (рис. 2).
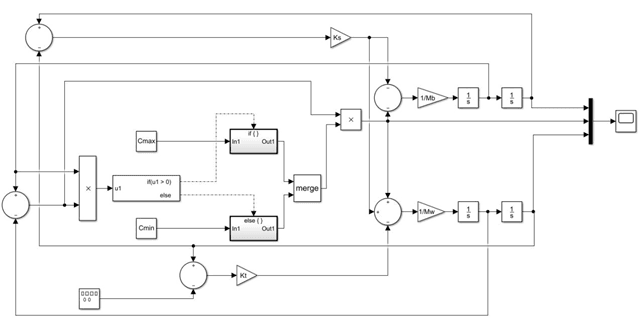
Рис. 2. Simulink модель полуактивной системы подрессоривания ¼ ТС под управлением алгоритма Skyhook
Алгоритм управления GH направлен на минимизацию отклонения деформации неподрессоренной массы от статического значения. Алгоритм управления GH сводится к минимизации разницы между усилием в демпфирующем элементе, соединяющем подрессоренную и неподрессоренную массы, и усилием теоретического демпфера, соединяющего неподрессоренную массу с неподвижным телом («землей»). Закон изменения коэффициента демпфирования полуактивной системы подрессоривания под управлением алгоритма GH может быть описан системой неравенств:

где: Cmax и Cmin - максимальный и минимальный коэффициенты демпфирования соответственно.
Имитационная модель полуактивной системы подрессоривания ¼ ТС под управлением алгоритма GH представлена ниже (рис. 3).
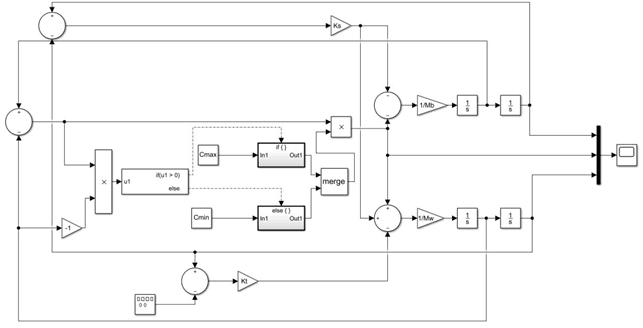
Рис. 3. Simulink модель полуактивной системы подрессоривания ¼ ТС под управлением алгоритма Groundhook
Гибридный алгоритм управления SH – GH основывается на совместной работе алгоритмов Skyhook и Groundhook. В то время, как система skyhook управляет колебаниями подрессоренной массы, а groundhook – неподрессоренной, то гибридная система обеспечивает баланс между этими двумя методами, что позволяет совместить сильные стороны обоих алгоритмов в необходимой пропорции [1, с. 46]. Для описания работы алгоритма управления SH – GH может быть использована следующая система уравнений:
где: σsky и σgnd – усилие демпфирования систем skyhook и groundhook соответственно;
Fsa – гибридная сила демпфирования;
G – эквивалентный коэффициент демпфирования систем управления skyhook и groundhook.
Имитационная модель полуактивной системы подрессоривания ¼ ТС под управлением гибридного алгоритма SH – GH представлена ниже (рис. 4).
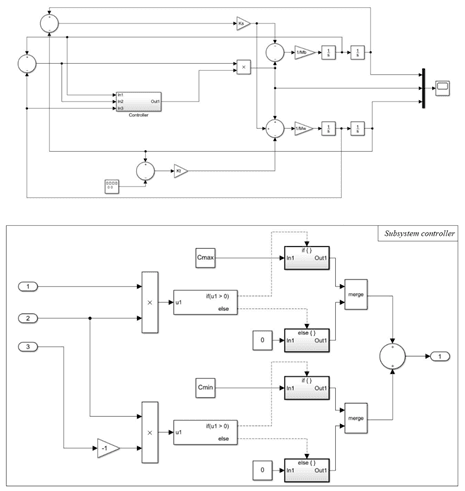
Рис. 4. Simulink модель полуактивной системы подрессоривания ¼ ТС под управлением алгоритма Hybrid SH – GH
Имитационное моделирование работы полуактивной системы подрессоривай под управлением исследуемых алгоритмов проводилось в среде Simulink при использовании следующих параметров (табл. 1).
Таблица 1
Параметры моделирования
|
Параметр |
Обозначение |
Значение |
|
Подрессоренная масса |
Mb |
350 [Кг] |
|
Неподрессоренная масса |
Mw |
45 [Кг] |
|
Жесткость системы подрессоривания |
Ks |
20000 [Н/м] |
|
Жесткость колеса (катка) |
Kt |
155000 [Н/м] |
|
Коэффициент демпфирования |
Cs |
1450 [Нc/м] |
С использованием выше представленных параметров моделирования проведено имитационное моделирование согласно моделям, представленным на рис. 2-4. В качестве воздействия со стороны дороги использовалось ударное воздействие с амплитудой 0.08 метра с частотой 2 Гц. Результаты моделирования занесены в (табл. 2).
Таблица 2
Результаты моделирования
|
|
Пассивная система |
Алгоритм Skyhook |
Алгоритм Groundhook |
Алгоритм Hybrid SH – GH |
|
Смещение подрессоренной массы |
0.083 м. |
0.048 м. |
0.09 м. |
0.085 м. |
|
Смещение неподрессоренной массы |
0.082 м. |
0.1 м. |
0.069 м. |
0.071 м. |
|
Изменение рабочего хода подвески |
0.12 м. |
0.11 м. |
0.105 м. |
0.09 м. |
|
Сила демпфирования |
1560-1725 Н |
2889-2972 Н |
2941-2115 Н |
2953-2487 Н |
|
Время регулирования |
4.5 с. |
1.7 с. |
3.9 с. |
3.3 с. |
В результате проведенного исследования алгоритмов управления упругодемпфирующими элементами полуактивных систем подрессоривания, можно сделать следующие выводы:
- Алгоритм Skyhook позволяет повысить плавность хода ТС в сравнении с пассивной системой подрессоривания за счет снижения пикового смещения подрессоренной массы, при этом использование алгоритма Skyhook приводит к рывкам подрессоренной массы, которые влекут за собой ухудшение контакта ТС с поверхностью дороги, и в следствии этого снижение управляемости и безопасности ТС;
- Алгоритм Groundhook позволяет более высокую устойчивость автомобиля по сравнению с пассивной системой подрессоривания. Уменьшение смещения неподрессоренной массы и рабочего хода подвески приводит к улучшению сцепление колеса (катка) с дорожной поверхностью, и в следствии этого повышение управляемости и безопасности ТС;
- Алгоритм Hybrid SH – GH представляет собой комбинацию алгоритмов Skyhook и Groundhook, поэтому плавность хода, устойчивость и управляемость ТС могут изменяться. Гибридный алгоритм управления позволяет установить необходимый баланс между улучшением плавности хода (преимущества алгоритма SH) и устойчивости с управляемостью ТС (преимущества алгоритма GH).
