.png&w=384&q=75)
1. Введение
Нелинейные системы автоматического управления (САУ) широко применяются в технике, робототехнике, авиации и энергетике. В отличие от линейных систем, они обладают сложной динамикой, включая автоколебания, хаотические режимы и множественные состояния равновесия [1].
Цель статьи – рассмотреть современные методы анализа нелинейных САУ, их преимущества и ограничения.
2. Математическое описание нелинейных САУ
Нелинейные САУ описываются дифференциальными уравнениями вида:
![]() , (1)
, (1)
Где ![]() – вектор состояния,
– вектор состояния, ![]() – управляющее воздействие,
– управляющее воздействие, ![]() – нелинейная функция.
– нелинейная функция.
Примером может служить уравнение маятника с трением:
![]() , (2)
, (2)
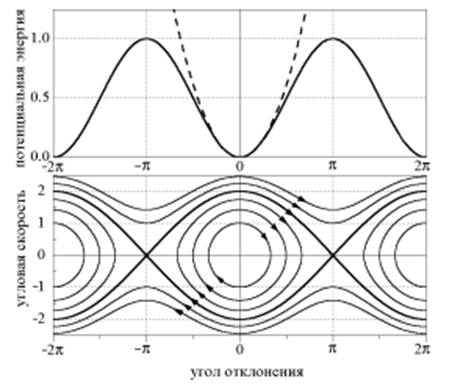
Рис. 1. Фазовый портрет нелинейного маятника [2]
3. Методы исследования нелинейных САУ
3.1. Линеаризация в окрестности точки равновесия
Линеаризация является одним из наиболее распространенных методов анализа нелинейных динамических систем. Этот подход позволяет использовать мощный аппарат линейной теории систем для исследования поведения нелинейных систем в малой окрестности точек равновесия.
Метод малых отклонений позволяет заменить нелинейную систему линейной моделью:
![]() , (3)
, (3)
Где ![]() – матрица Якоби.
– матрица Якоби.
3.2. Метод фазовой плоскости
Метод фазовой плоскости является одним из ключевых инструментов анализа нелинейных систем автоматического управления (САУ) второго порядка. В статье рассматриваются основные принципы построения фазовых портретов, их интерпретация, а также применение метода для исследования устойчивости и динамики нелинейных систем. Приводятся примеры анализа конкретных систем, включая маятник и релейную систему управления.
Метод фазовой плоскости – это графический способ исследования динамики систем, описываемых дифференциальными уравнениями второго порядка. Он особенно полезен для анализа нелинейных систем, где аналитическое решение часто затруднительно. Основная идея метода заключается в построении траекторий в координатах фазовой плоскости:
![]() , (4)
, (4)
Где ![]() – переменная состояния,
– переменная состояния, ![]() – её производная [3].
– её производная [3].
3.3. Метод гармонического баланса
Метод гармонического баланса (МГБ) относится к частотным методам исследования нелинейных систем и позволяет определять параметры возможных автоколебаний без полного решения нелинейных дифференциальных уравнений. Метод особенно полезен для систем с существенными нелинейностями, где традиционные методы линеаризации оказываются неэффективными.
Условие баланса амплитуд и фаз формулируется в виде:
![]() , (5)
, (5)
Где ![]() – частотная характеристика линейной части,
– частотная характеристика линейной части, ![]() – описывающая функция нелинейности.
– описывающая функция нелинейности.
3.4. Функции Ляпунова
Метод функций Ляпунова, разработанный русским математиком А. М. Ляпуновым в 1892 году, остается фундаментальным инструментом анализа устойчивости нелинейных динамических систем. В отличие от методов линеаризации, этот подход позволяет исследовать устойчивость непосредственно для нелинейных систем, не прибегая к их упрощению.
Если существует положительно определенная функция ![]() , такая что
, такая что ![]() , то система устойчива [4].
, то система устойчива [4].
4. Численное моделирование нелинейных САУ
Современные пакеты (MATLAB Simulink, Wolfram SystemModeler) позволяют моделировать сложные нелинейные системы. Пример схемы в Simulink:
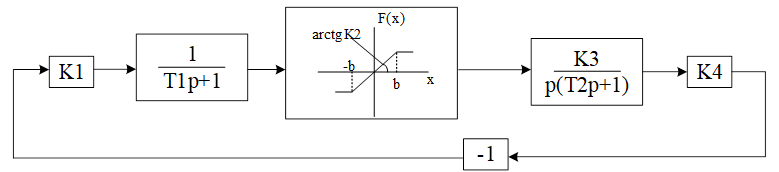
Рис. 2. Модель нелинейной системы в Simulink [5]
5. Заключение
Исследование нелинейных САУ требует комплексного подхода, сочетающего аналитические и численные методы. Перспективным направлением является применение методов машинного обучения для идентификации нелинейных моделей.
