Цель данной статьи – провести качественный анализ эффективности работы методов интеллектуальной оптимизации для решения эквивалентного обусловленного аналога задачи вероятностного программирования.
Введение.
В настоящее время большое значение придают развитию и применению искусственного интеллекта (ИИ), в том числе и в системах с применением беспилотных летательных аппаратов. Нейронные сети и другие программные средства, с реализованными в них алгоритмами, значительно увеличивают число практически значимых задач, которые можно моделировать и решать при помощи средств вычислительной техники.
Наиболее перспективное направление в области использования БЛА – это объединение их в группы или в рой [1].
Примерами использования роевого алгоритма в живой природе являются: муравьиный алгоритм, пчелиный алгоритм, светлячковый алгоритм и так далее. В случае работы с БЛА, после их объединения в рой, каждый беспилотный аппарат управляется собственной автоматической системой, а поведением роя может управлять программа с элементами ИИ, использующая заранее запрограммированный алгоритм действий или управляться одним или несколькими операторами.
В последнее время крайне повысился интерес к решению задач математического программирования с помощью методов интеллектуальной оптимизации, все более востребованным становится решение задач вероятностного программирования, коэффициенты которых являются неопределёнными наверняка числами.
Роевой интеллект.
Роевой интеллект описывает коллективное поведение децентрализованной самоорганизующейся системы. Рассматривается в теории искусственного интеллекта как метод оптимизации [2].
Система роевого интеллекта – это множество агентов, которые взаимодействуют между собой и с окружающей средой. При локальном взаимодействии агенты, которые поодиночке довольно просты, создают так называемый роевой интеллект. Примером могут быть рой пчел, птиц, колония муравьев, стая рыб и т.д.
Создающиеся компьютерные модели, описывающие поведение живой природы, уже применяются для создания различных математических алгоритмов, позволяющих решать сложнейшие задачи (табл.).
Таблица
Сравнительный анализ алгоритмов стохастической оптимизации
|
1 |
Пчелиный алгоритм |
Метод роя частиц |
Светлячковый алгоритм |
Муравьиный алгоритм |
Генетический алгоритм | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
2 |
min |
max |
average |
min |
max |
average |
min |
max |
average |
min |
max |
average |
min |
max |
average |
|
3 |
12,06 |
18,06 |
15,21 |
19,04 |
26,03 |
22,15 |
17,04 |
25,53 |
21,08 |
29,01 |
36,07 |
33,12 |
7,49 |
15,58 |
11,35 |
|
4 |
15,01 |
22,27 |
19,01 |
22,01 |
29,12 |
25,35 |
21,04 |
27,24 |
24,16 |
31,49 |
39,11 |
35,46 |
12,01 |
18,12 |
15,09 |
|
5 |
17,02 |
23,31 |
20,24 |
23,49 |
31,12 |
28,03 |
23,14 |
29,17 |
26,33 |
34,05 |
40,59 |
38,10 |
13,52 |
20,24 |
17,03 |
Данная таблица наглядно показывает, что использование пчелиного алгоритма наиболее приемлемо при формировании модели роя БЛА.
Рассмотрим подробнее характеристику каждого метода.
Пчелиный алгоритм. Принцип работы пчелиного алгоритма основан на поведении роя пчел [3].
Основная цель роя – попасть на поле ту область, где плотность цветов будет наибольшей. Изначально пчелы не имеют никакого представления о данном поле, они начинают поиск цветов со случайных позиций, при этом у каждой пчелы свой вектор скорости (но он может совпадать с вектором скорости любой другой пчелы). Каждая пчела запоминает те позиции, где она нашла самое большое количество цветов. При этом она может каким-либо образом знать, где другие пчелы нашли области с наибольшей плотностью. Далее перед пчелой стоит выбор: вернуться туда, где она нашла наибольшее количество цветов, либо лететь к тому месту, где другие пчелы нашли идентичную область. Выбор пчелы в данном случае будет зависеть от того, что окажет большее влияние на ее решение – ее собственное воспоминание или социальный рефлекс. Во время того, как пчела будет лететь на выбранное ею место, она может найти область с еще более высокой концентрацией цветов, чем было найдено ранее. Это место может быть выделено как новое, найденное пчелой, у которого плотность цветов наибольшая, а также как найденное всем роем. Однако пчела может случайно пролететь мимо того места, где плотность цветов выше, чем у области, найденной другой особью. Тогда весь рой в итоге будет лететь в направлении этого места, которое добавится к наблюдению каждой пчелы.
Количество итераций показывает, сколько необходимо совершить действий, согласно алгоритму роя пчёл, чтобы достичь устойчивого положения. Корректировка скорости частицы при использовании алгоритма пчёл.
Манипуляции со скоростью частицы являются основным элементом всей оптимизации. Точное понимание уравнения, используемого для определения скорости, является ключом к пониманию всего процесса оптимизации (рис.).
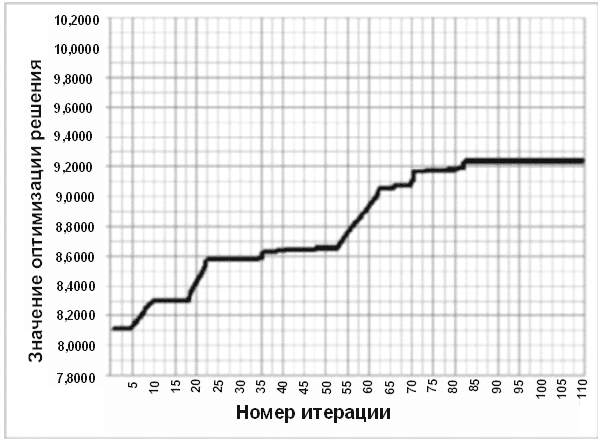
Рис. Зависимость количества итераций от оптимизируемой функции
Скорость частицы меняется в соответствии со взаимным расположением персональной наилучшей позиции (ПНП) и глобальной наилучшей позиции (ГНП). Она стремится в направлении этих позиций наибольшей пригодности в соответствии со следующим уравнением [4]:
 (1)
(1)
где:  – это скорость частицы в n-том измерении на предыдущем шаге,
– это скорость частицы в n-том измерении на предыдущем шаге,
xn – это координата частицы в n-том измерении,
pn – ПНП,
gn – ГНП.
Расчет производится для каждого из N. Из этого уравнения видно, что новая скорость получается из старой скорости путем простого масштабирования на , и прибавления направления ГНП и ПНП для этого конкретного направления. и – это масштабные коэффициенты, которые определяют относительное взаимное «притяжение» к ПНП и ГНП. Они иногда рассматриваются как познавательный и социальный факторы.
С1 – это коэффициент, определяющий какое влияние на частицу оказывает ее память о ПНП, и – коэффициент, определяющий какое влияние на частицу оказывают остальные члены роя. Увеличение предполагает исследование пространства решений путем движения каждой частицы в направлении своего ПНП; увеличение предполагает исследование предполагаемого глобального максимума. Функция случайных чисел rand() возвращает число в интервале между -1 и 1. В общем случае два появления функции rand() представляет собой два различных вызова функции. Большинство реализаций используют две независимые случайные величины для стохастического изменения относительного притяжения ГНП и ПНП. Это введение случайного элемента в оптимизацию предназначено для моделирования незначительного непредсказуемого компонента реального поведения роя.
ω называют «инерционным весом» и это число (выбранное в интервале между 0 и 1) отражает в какой мере частица остается верной своему первоначальному курсу, не подвергшемуся влиянию ГНП и ПНП [5].
Преимущества применения группы БЛА:
- снижение конечной стоимости БЛА;
- распределение полезной нагрузки на несколько бортов (возможность сэкономить на конечной стоимости полезной нагрузки);
- понижение количества потерь машин от аварий;
- улучшение точности позиционирования каждого БЛА за счет взаимного позиционирования на местности;
- улучшение получаемых результатов за счет разных углов зрения разных БЛА;
- ускорение получения результата в ряде применений.
Недостатки и ограничения применения групп БЛА:
- требуются высокие вычислительные возможности на борту БЛА для взаимодействия в полете, в составе группы и предварительной обработки собираемой информации в режиме реального времени;
- необходимые новые типы управляющего ПО;
- желательна интеграция системы управления группой БЛА и ПО полезных нагрузок;
- рабочие машины в рое не только не должны сталкиваться, но также не должны мешать друг-другу, создаваемыми ими воздушными потоками.
- БЛА в рое должны иметь возможность коллективно распределять «специальности» и при необходимости перераспределять назначения данные отдельным участникам роя, например, при выходе из строя тех или иных «специалистов».
Для повышения живучести системы разведки или атаки предполагается увеличение числа летательных аппаратов, занимающихся разведкой, или атакующих цель БЛА.
При проведении операции на вражеской территории, система противовоздушной обороны (ПВО) может оказаться «в критической ситуации» исходя из числа целей и в итоге не сможет предотвратить группой БЛА выполнение задачи противником.
Также группы БЛА могут использоваться для эффективного поиска пропавших людей или имущества, обеспечивая «параллельный» поиск на большой территории, особенно в труднодоступных районах.
Группа (рой) БЛА может оказаться эффективным средством противодействия враждебному рою БЛА, или же, при необходимости, являться отвлекающим моментом для противника
Существует несколько направлений среди моделей и методов исследования искусственного интеллекта:
- моделирование рассуждений (необходимо создать систему, которая будет решать необходимую задачу);
- обработка естественного языка (анализ входящих данных, для их дальнейшей обработки в естественный язык, для общего понимания);
- генетический подход (с каждым «новым поколением» система, накапливая общие полученные знания и опыт, становится более эффективной, что значит более живучей, работоспособной и полезной);
- машинное обучение (в процессе взаимодействия и общей работы система накапливает знания и опыт, который, в дальнейшем, применяет в своей работе).
Рассмотрим алгоритм роевого интеллектуального управления [6, 7].
- Все микророботы, входящие в состав роя, получают из некоторого пункта управления тип (номер) k задачи, стоящей перед роем.
- Каждый микроробот ri, входящий в состав роя, определяет (или получает по каналам связи) информацию о текущем состоянии и локальных действиях микророботов роя, попадающих в зону видимости.
- На основании полученных данных микроробот ri определяет состояние, в котором функция принимает минимальное значение.
- Микроробот ri определяет действие ai, направленное на преобразование его текущего состояния Si в состояние.
- Микроробот ri реализует локальное действие ai, после чего переходит к п. 2.
Вывод.
В ходе написания данной научной статьи был изучен математический аппарат вероятностной оптимизации, метод оптимизации с помощью пчелиного алгоритма, наиболее подходящий для построения алгоритмов роевого интеллектуального управления БЛА, а также алгоритмы интеллектуальной оптимизации на основе природного генетического разнообразия видов.
Для исследований была выбрана модель уровневой оптимизации с ограниченным выбором. Сравнительный анализ выполнен для задач с двумя и тремя параметрами. Для проведения анализа была сгенерирована выборка из множества задач, удовлетворяющих условиям невырожденности области определения необходимого значения.
После решения задач выбранным алгоритмом был проведен сравнительный анализ эффективности работы исследуемых алгоритмов интеллектуальной оптимизации. Проведенный анализ показал, что при разработке алгоритмов интеллектуального управления группой БЛА, построенной по децентрализованному принципу наиболее подходящим алгоритмом оптимизации является алгоритм роя пчел, дающий возможность автономно осуществлять движение группы без участия человека-оператора, что в свою очередь повышает живучесть группировки в условиях действия преднамеренных воздействий со стороны вероятного противника.
