.png&w=384&q=75)
Введение
Повышение требований к устойчивости и энергоэффективности режимов перекачки на магистральных трубопроводах (МТ) обусловливает необходимость учёта температурных возмущений при управлении магистральными насосными агрегатами (МНА), поскольку изменение температуры нефти приводит к изменению её вязкости, росту гидравлических потерь и смещению рабочей точки насоса, что непосредственно влияет на точность поддержания расхода и давления. Нелинейный характер зависимости «температура – вязкость» усиливает параметрическую нестационарность объекта управления и снижает эффективность классических систем регулирования с фиксированными настройками. В связи с этим актуальной является разработка алгоритмов управления, использующих температурную компенсацию и адаптацию ПИД-регуляторов для обеспечения устойчивой и безопасной работы магистральных насосных агрегатов в условиях горячей перекачки нефти.
1. Температурное влияние на вязкость и нестационарность объекта управления
Температурный режим нефти в условиях горячей перекачки определяет её вязкость μ, а через неё формирует гидравлическое сопротивление трубопроводной системы и режим работы магистрального насосного агрегата. При снижении температуры вязкость возрастает нелинейно, что приводит к росту потерь напора на линейном участке и местных сопротивлениях, снижению фактического расхода при неизменной частоте вращения и смещению рабочей точки насоса в область меньших подач [2, 3]. Для МНА при перекачке вязких сред характерно ухудшение энергетических показателей и изменение напорной характеристики, поэтому одинаковое управляющее воздействие при разных температурах приводит к разным значениям расхода и давления, то есть статическая характеристика объекта управления становится функцией температуры [2].
С позиции теории автоматического управления изменение μ(T) означает параметрическую нестационарность объекта, так как меняются коэффициенты усиления и инерционность канала «управляющее воздействие u – расход Q». В практической интерпретации это проявляется следующим образом. При охлаждении нефти возрастает доля потерь напора в трубопроводной системе, а чувствительность расхода к изменению частоты вращения уменьшается, что снижает эффективный коэффициент усиления объекта. Одновременно увеличивается запаздывание и постоянная времени, поскольку инерционность потока возрастает при повышенной вязкости и при переходе режимов течения к области меньших чисел Рейнольдса. В результате при фиксированных настройках регулятора растут время переходного процесса и динамическая ошибка, а также увеличивается вероятность выхода на ограничения по давлению при попытке компенсировать возмущение только ростом u. Для режима горячей перекачки это критично, поскольку требования режимной организации предполагают соблюдение допустимых значений давления и устойчивости гидравлического режима на участке [1].
Дополнительный риск связан с кавитационной устойчивостью. При понижении температуры и росте вязкости увеличиваются потери давления на всасывающем участке, что уменьшает доступный кавитационный запас и повышает вероятность кавитационных явлений при неблагоприятных сочетаниях входного давления и расхода [6]. Для МНА эксплуатационные требования к допустимым режимам и условиям безопасной работы должны учитываться совместно с задачей стабилизации расхода, поскольку регулирование «по качеству» не может быть отделено от регулирования «по ограничениям» [7]. Поэтому температура нефти должна рассматриваться не как внешняя неопределённость, а как измеряемое возмущение, подлежащее компенсации и использованию в логике выбора режимов [1; 4, с. 36-52].
2. Базовый закон регулирования и температурная компенсация
В качестве регулируемой величины принимается расход Q(t), а управляющим воздействием является сигнал u(t) на частотное управление приводом насоса. Ошибка регулирования определяется как:
![]() , (1)
, (1)
Базовый закон управления задаётся ПИД-регулятором:
 , (2)
, (2)
При неизменных коэффициентах Kp, Ki, Kd качество регулирования существенно зависит от текущей температуры, поскольку объект «переходит» между различными динамическими состояниями. В области низких температур рост инерционности приводит к замедлению реакции контура и росту интегральной составляющей, что увеличивает риск перерегулирования при последующем восстановлении температуры. В области повышенных температур объект становится более «быстрым» и чувствительным к управлению, из-за чего те же настройки регулятора могут приводить к избыточной активности по производной составляющей и возбуждению колебаний при наличии шумов измерения расхода. Эти эффекты хорошо согласуются с известными подходами оптимизации ПИД-регуляторов при переменных свойствах рабочей среды, где требуется либо перенастройка, либо введение корректирующих каналов [5, с. 48-55].
Для компенсации температурного влияния вводится корректирующая ветвь по измеренной температуре, формируемая как аддитивная поправка к выходу регулятора:
![]() , (3)
, (3)
Параметр Tном соответствует номинальному режиму горячей перекачки, а коэффициент KT определяет интенсивность упреждающей компенсации. При снижении T(t) относительно Tном поправка увеличивает uкомп(t), компенсируя рост вязкости и потерь напора, а при повышении температуры уменьшает uкомп(t), снижая вероятность превышения давления и избыточного энергопотребления. На практике KT выбирается по результатам моделирования и уточняется по данным наладки, поскольку слишком малое значение даёт недостаточную компенсацию и рост статической ошибки при охлаждении, а слишком большое увеличивает риск колебательных режимов при наличии запаздываний и ограничений по исполнительному воздействию [4, с. 36-52; 5, с. 48-55]. Важно, что поправка (3) является физически интерпретируемой, поскольку связывает управляющее воздействие с измеряемым фактором изменения μ(T), а не только с ошибкой e(t). Это делает алгоритм устойчивее к ситуациям, когда ошибка по расходу появляется уже после существенного изменения вязкости и регулятор вынужден «догонять» режим.
На рисунке показана зависимость вязкости μ и управляющего воздействия u(t) от температуры, полученная по данным расчётов температурной коррекции.
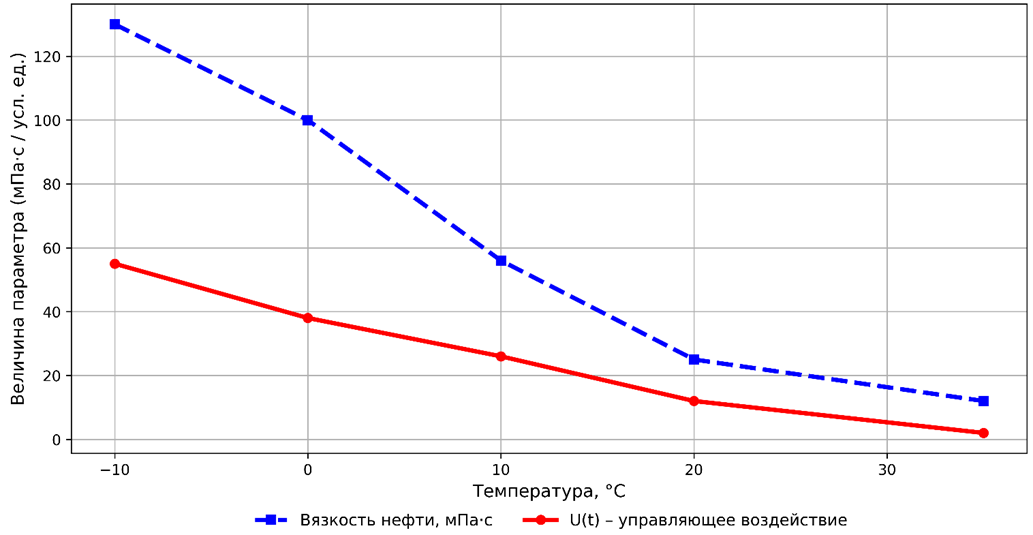
Рис. Влияние температуры на вязкость нефти и управляющее воздействие
Рост температуры приводит к снижению μ, что соответствует реологическим закономерностям и подтверждённой практикой зависимости влияния вязкости на характеристики центробежных насосов [2, 3]. Согласованное снижение требуемого управляющего воздействия при росте температуры, то есть упреждающая коррекция уменьшает u(t) в зоне, где объект становится более «лёгким» по гидравлике. Это позволяет удерживать расход без излишнего повышения давления и без ухода насоса в нерасчётные области характеристики, которые при горячей перекачке проявляются ростом вибраций и повышенной нагрузкой на привод [3].
3. Реализация алгоритма в составе АСУ ТП с учётом ограничений по безопасности
Температурная компенсация по формуле (3) не является самостоятельным контуром, она реализуется параллельно базовому регулированию и должна работать совместно с ограничениями по безопасности и эксплуатационными условиями насосного агрегата. Для режима горячей перекачки ключевыми являются ограничения по давлению на нагнетании, по входному давлению и по минимально допустимому расходу, так как именно эти параметры определяют риск кавитации, перегрева и перегрузки электропривода. С точки зрения эксплуатации МНА недопустимо допускать режим, в котором регулятор стремится компенсировать охлаждение исключительно повышением u, игнорируя приближение к Pмакс, поскольку это может приводить к срабатываниям защит и нарушению режимной дисциплины трубопровода [1].
Логика реализации в промышленной системе управления может быть описана как трёхуровневая структура. На первом уровне выполняется непрерывное регулирование расхода по формуле (2) с температурной коррекцией по формуле (3). На втором уровне действует ограничение по давлению, где выходное управляющее воздействие насыщается сверху так, чтобы P на выходе насоса не превышало допустимое значение, установленное режимом участка и требованиями к насосному оборудованию [7]. На третьем уровне реализуются защитные действия и блокировки по условиям кавитационной устойчивости и теплового режима. В частности, при снижении входного давления или при падении расхода ниже технологического минимума должны вводиться ограничения на рост u либо инициироваться переход в безопасное состояние, поскольку рост вязкости увеличивает потери на всасывании и может привести к кавитации даже при попытке сохранить расход [6].
Температурная коррекция должна работать как упреждающий канал, но в пределах допустимых режимов. Это означает, что корректирующая поправка по температуре должна быть ограничена по величине и по скорости изменения, чтобы исключить резкие скачки u при шуме температурного сигнала и при переходах между температурными диапазонами. Это достигается фильтрацией измерения температуры и введением ограничений на скорость изменения управляющего воздействия. Такой подход согласуется с практикой адаптивного управления насосными агрегатами при термической нестабильности, где устойчивость обеспечивается сочетанием компенсации возмущения и жёстких ограничений по безопасности [4, с. 36-52].
Дополнительно температурный сигнал используется для переключения параметров регулятора по диапазонам, когда вместо непрерывного изменения коэффициентов применяется набор настроек для нескольких температурных зон. Такой метод снижает сложность внедрения и обеспечивает воспроизводимость наладочных решений. При этом коэффициент KT и настройки регулятора выбираются так, чтобы в зоне минимальной вязкости управление не приводило к избыточному давлению, а в зоне максимальной вязкости обеспечивало требуемую динамику без выхода на ограничения. Поскольку условия горячей перекачки регламентируются требованиями к организации режима, применение температурной информации в алгоритме управления позволяет увязать регламентные режимы и фактическое состояние потока на основе измерений [1; 5, с. 48-55].
Заключение
Температурно-зависимая вязкость нефти формирует параметрическую нестационарность магистрального насосного агрегата и ухудшает качество классического ПИД-регулирования при фиксированных настройках. Базовый закон управления по формуле (2) целесообразно дополнять температурной компенсацией по формуле (3), рассматривая температуру как измеряемое возмущение и используя её для упреждающей коррекции управляющего воздействия. Эффективность подхода подтверждается физической интерпретацией зависимости «температура – вязкость – управляющее воздействие» и обеспечивает снижение динамической ошибки при соблюдении ограничений по давлению и по кавитационной устойчивости. Настройка коэффициента KT должна выполняться по результатам моделирования и уточняться при наладке с учётом требований к допустимым режимам насосного оборудования и условий безопасной эксплуатации [4, с. 36-52; 7].
