В настоящее время наряду с решением задач по организации различного рода процессов, уделяется значительное внимание реализации процедур организации и планирования комплексов работ процессов [1]. В основном реализация процедур планирования направлена на оптимизацию процессов, включающую распределение людских и материальных ресурсов, выбор временных показателей выполнения отдельных работ и распараллеливание отдельных подпроцессов.
Организация планирование по средствам функционально-сетевой модели (ФСМ) требует значительных временных затрат. Исходя из этого целесообразно использовать динамическую модель планирования [2], позволяющую в интерактивном режиме моделировать будущий процесс.
В данной статье рассматривается динамическая модель планирования процесса производства продукции, реализованная на базе сети Петри [3].
Основные этапы планируемого процесса представлены в таблице.
Таблица
Перечень работ по производству продукции
|
Работа |
Наименование работы |
Продолжительность работы (человеко-день) |
|
0-1 |
Обоснование цели проекта |
4 |
|
1-2 |
Проведение маркетинговых исследований |
6 |
|
2-3 |
Разработка технических условий |
9 |
|
3-4 |
Эскизное проектирование |
6 |
|
4-10 |
Техническое проектирование |
6 |
|
2-5 |
Расчет потребности ресурсов |
2 |
|
2-6 |
Уточнение источников финансирования |
2 |
|
6-7 |
Расчет бюджета |
3 |
|
5-8 |
Выбор поставщика ресурсов |
2 |
|
8-9 |
Согласование сроков поставки |
3 |
|
9-10 |
Закупка ресурсов |
3 |
|
10-11 |
Изготовление деталей |
18 |
|
11-12 |
Сборка деталей |
15 |
|
12-14 |
Сертификация продукции |
6 |
|
7-13 |
Расчет затрат |
3 |
|
14-15 |
Отправка продукции потребителю |
6 |
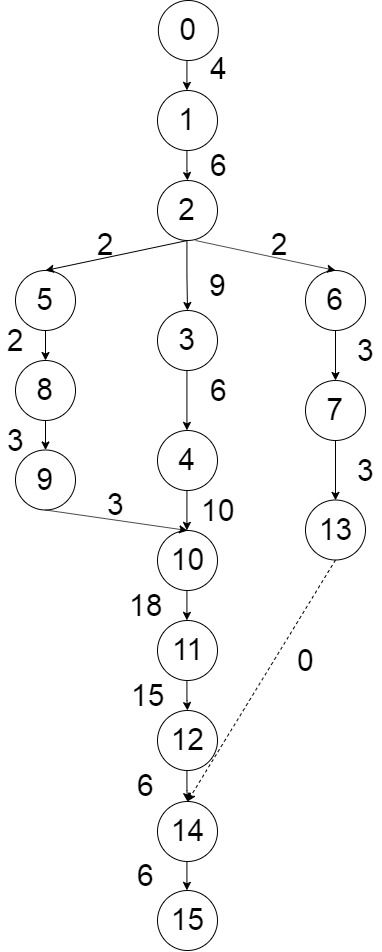
На рис. 1 приведен граф ФСМ планирования процесса производства продукции
Рис. 1. Функционально-сетевая модель планирования процесса производства продукции
При синтезировании динамической модели планирования в виде безопасной сети Петри определено:
– Множество позиций
P = {p0, p1, p2, p3, p4, p5, p6, p7, p8, p9, p10, p11, p12, p13, p14, p15, p16, p17},
отражающее факты начала и завершения отдельных работ планируемого процесса.
– Множество переходов
T = {t0, t1, t2, t3, t4, t5, t6, t7, t8, t9, t10, t11, t12, t13, t14},
задающее последовательность выполнения работ планируемого процесса.
– Функцию времени задержки в позициях сети:
θ(p1) = [ 0 4 6 9 6 6 2 2 3 3 3 3 18 15 6 6 0],
определяющую продолжительность выполнения работ.
– Начальную маркировку динамической сети:
M0 = {1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}.
– Функцию отображения множества позиций во множество переходов и функцию отображения множества переходов во множество позиций, отражающих топологию сети планирования.
На рис. 2 представлена динамическая модель планирования процесса производства продукции.
Запуск процесса моделирования инициируется подачей маркера в позицию p0 динамической модели планирования, который без задержки по времени открывает переход t0 и запускает работу «Обоснование цели проекта» (p1), продолжительностью θ(p1) = 4. По истечению времени θ(p1) срабатывает переход t1 и маркер попадает в позицию p2, в которой «созревает» и запускает следующую работу процесса. Следует отметить, что срабатывание переходов происходит при «созревании» маркеров во всех позициях, связанных с тем или иным переходом сети. Таким образом, процесс «созревания» маркеров позволяет моделировать продолжительности работ процесса.
Использовав динамическую модель планирования работ, исследователь может в установленном или реальном масштабе времени наблюдать прохождение этапов планируемого им процесса, визуально оценить проблемы, связанные с перегрузкой или недогрузкой отдельных работ сети, ошибки в организации топологии сети.
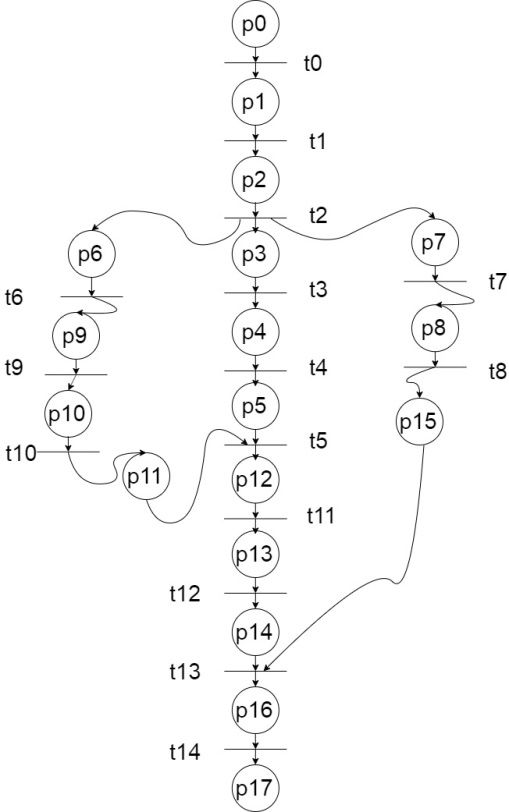
Рис. 2. Динамическая сетевая модель планирования
При необходимости исследователь может модернизировать планируемый процесс и повторить модельную визуализацию выполнения планируемого процесса.
Программная реализация динамической модели планирования процесса позволяет значительно повысить оперативность принятия решений и снизить трудоемкость решения задач планировании процессов.
