Введение
В радиотехнических системах (РТС) решаются следующие основные задачи:
- обнаружение сигнала;
- распознавание-различение сигналов;
- измерение параметров сигналов.
Обнаружение сигнала в РТС, как правило, осуществляется на фоне шумов и помех. Помехи по своей природе классифицируются как мешающие отражения или как мешающие излучения. По происхождению они могут быть как естественными, так и искусственными, создаваемыми преднамеренно. Помехи нарушают нормальное функционирование РТС или могут полностью подавить их.
Выделение полезного сигнала из помех осуществляется на основе их различий. Эти различия могут быть: энергетическими, частотными, временными, спектральными, пространственными, поляризационными и статистическими.
В данной лабораторной работе рассматривается автокомпенсатор АШП, воздействующей на РЛС по боковым лепесткам диаграммы направленности (ДН). В основе компенсации АШП лежат пространственные различия полезного сигнала и помехи. Действительно, полезный эхо-сигнал принимается по основному лепестку диаграммы направленности антенны, а помеховый сигнал воздействует по боковым лепесткам этой же антенны.
Принцип работы автокомпенсатора
Вследствие узкой диаграммы направленности антенн РЛС в горизонтальной плоскости постановщик активной шумовой помехи эффективно подавляет приемные каналы РЛС в сравнительно узком секторе, обычно именуемом сектором эффективного подавления, размер которого зависит от спектральной плотности мощности помехи, дальности от постановщика помех и ширины диаграммы направленности в горизонтальной плоскости. Учитывая, что в радиолокационной системе используется информация от нескольких РЛС, разнесенных на местности, активной помехой поражается небольшая область пространства, в которой расположен сам постановщик помех.
Более эффективным является воздействие активных шумовых помех по боковым лепесткам основной антенны, обеспечивающих прием помех почти вкруговую. Активные помехи, принятые по боковым лепесткам, ухудшают соотношение сигнала и шума и тем самым резко сокращают зону обнаружения РЛС по дальности и высоте. Эти причины приводят к появлению в радиолокационном поле не просматриваемых участков и уменьшению вероятности обнаружения цели.
Технически задача защиты РЛС от АШП, действующих по боковым лепесткам диаграммы направленности антенны, решается устройством, получившем название автокомпенсатор АШП, а комплект аппаратуры защиты РЛС от активных шумовых помех – АЗАШП.
Основными элементами автокомпенсатора являются: сумматор, управляемый усилитель и коррелятор (рис. 1).
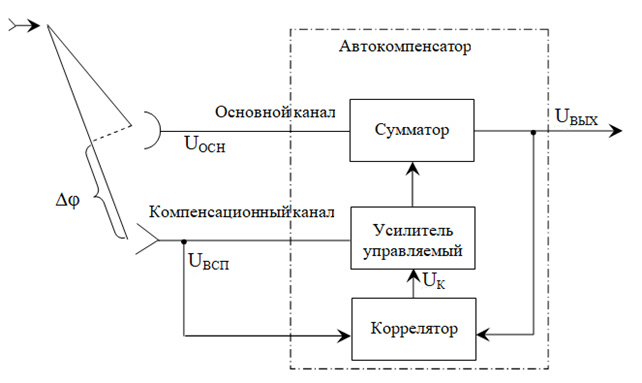
Рис. 1. Структурная схема автокомпенсатора
Сигналы АШП принимаются одновременно основной и вспомогательной антеннами и обрабатываются в основном и компенсационном каналах соответственно. С этих каналов сигналы поступают на входы сумматора, причем в цепь компенсационного канала включен управляемый усилитель с комплексным коэффициентом передачи.
Сигналы АШП принимаются от одного источника одновременно двумя антеннами, поэтому характер изменения помехи в основном и компенсационном каналах будет одинаковым и напряжения помехи Uосн и Uвсп на выходах антенн отличаются только амплитудой и сдвигом по фазе, определяемыми диаграммами направленности антенн и разностью хода сигналов в основном и компенсационном каналах. Таким образом, сигналы АШП в основном и вспомогательном каналах подобны, т.е. коррелированы.
Задачей управляемого усилителя является изменение амплитуды и фазы помехи по компенсационному каналу на входе сумматора так, чтобы она была равной по амплитуде и противоположной по фазе помехе на основном входе независимо от азимута постановщика помех. В этом случае на направлении по- становщика помех в результирующей ДН формируется нуль приема сигнала, т.е. осуществляется пространственная режекция.
Изменение коэффициента передачи управляемого усилителя происходит под воздействием управляющего напряжения Uk, вырабатываемого коррелятором. Для этого на вход коррелятора поступают напряжения помехи с выхода сумматора и с антенны компенсационного канала. Коррелятор производит перемножение этих напряжений и усреднение их во времени, в результате чего амплитуда и полярность его выходного напряжения Uk определяются величиной остатка помехи на выходе сумматора автокомпенсатора и сдвигом по фазе сигналов помехи в основном и компенсационном каналах. Ввиду отрицательного знака обратной связи управляющее напряжение устанавливает минимальное значение остатка помехи на выходе сумматора. Несмотря на то что в состав шумовых сигналов основного и компенсационного каналов, кроме напряжения шумов постановщика помех, входят независимые собственные шумы приемных каналов, в процессе перемножения и усреднения напряжений коррелятором управляющее напряжение вырабатывается только из их общей (коррелирован- ной) части. Вот почему обратная связь называется корреляционной.
В направлении главного лепестка основной антенны шумовые помехи в основном канале значительно превосходят помехи в компенсационном, поэтому на выходе автокомпенсатора они действуют без ослабления. На склонах диаграммы направленности, где напряжение помех в обоих каналах сравнимо по амплитуде, автокомпенсатор ослабляет помеху в основном канале и тем самым сужает сектор приема помехи по главному лепестку (сужает сектор эффективного подавления).
Итак, автокомпенсатор не только сужает сектор приема помех по главному лепестку диаграммы направленности, но и формирует нулевой прием (компенсацию приема помехи) по боковым лепесткам диаграммы направленности в направлении источника АШП.
Изменение амплитуды и фазы сигналов в управляемом усилителе и перемножение напряжений в корреляторе технически проще реализовать на промежуточной частоте смесителей. Поэтому автокомпенсатор работает на промежуточной частоте 30 МГц и называется гетеродинным.
Структурная схема одноканального автокомпенсатора с управлением по гетеродинному напряжению приведена на рис.2. В этой схеме управляемый смеситель играет, по существу, ту же роль, что и управляемый усилитель в схеме на рис.1. Параметры управляемого смесителя определяются изменением гетеродинного напряжения на выходе узкополосного фильтра, представляющего собой интегратор с высокой добротностью.
Взаимная компенсация коррелированных помех основного и компенсационного каналов в сумматоре достигается тем, что помеха компенсационного канала на выходе управляемого смесителя оказывается равной по амплитуде и противоположной по фазе помехе основного канала на входе сумматора. В тракте компенсационного канала введен вспомогательный УПЧ (ВУПЧ), который обеспечивает компенсацию запаздывания сигнала основного канала в цепи обратной связи (в сумматоре, УОС), так как сигналы основного и компенсационного каналов должны приходить на входы коррелятора одновременно. Кроме того, нечетное количество каскадов в ВУПЧ обеспечивает сдвиг фазы помехи в компенсационном канале на 1800, тем самым определяется характер корреляционной обратной связи – она становится отрицательной, минимизирующей сигнал помехи на выходе сумматора. Частотные и фазовые соотношения между напряжениями указаны на рис.2.
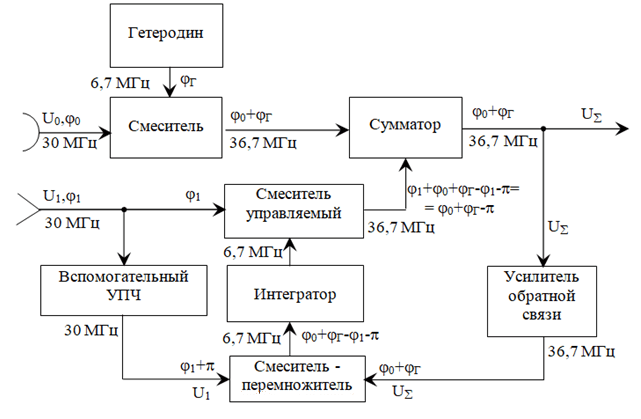
Рис. 2. Структурная схема гетеродинного автокомпенсатора
В смесителе-перемножителе происходит выделение разностной частоты 6,7 МГц, что сопровождается вычитанием фаз перемножаемых напряжений U и U1. Поэтому фаза гетеродинного напряжения на выходе узкополосного фильтра будет равна:
j0 + jГ – (j1 + p),
где j0 - фаза помехи на входе основного канала;
jГ - фаза напряжения гетеродина основного канала;
j1- фаза помехи на входе компенсационного канала.
В управляемом смесителе, наоборот, происходит выделение суммарной частоты, что сопровождается сложением фаз входных напряжений смесителя. Таким образом, фаза помехи на входе управляемого смесителя компенсационного канала равна:
j1 + j0 + jГ - j1 - p = j0 + jГ - p,
т.е. помеха на выходе компенсационного канала когерентна с помехой на выходе основного канала независимо от величины j1.
Для выравнивания амплитуд коррелированных помех на входах сумматора используется цепь отрицательной корреляционной обратной связи в компенсационном канале: УОС, смеситель-перемножитель, интегратор. На выходе коррелятора этой цепи формируется управляющее напряжение, пропорционально взаимной корреляционной функции напряжений помехи на входах смесителя-перемножителя компенсационного канала. От величины этого напряжения зависит амплитуда напряжения на выходе управляемого смесителя.
Гетеродинное напряжение вырабатывается на выходе узкополосного фильтра (интегратора) только при наличии взаимной корреляции сигналов помехи основного и компенсационного каналов. Для некоррелированных сигналов (внутренние шумы и т.п.) их функция равна нулю, что эквивалентно автоматическому отключению компенсационного канала от входа сумматора.
Интегратор, выполненный в виде узкополосного кварцевого фильтра, обеспечивает выделение из спектра частот коррелятора составляющей частоты гетеродина. Вместе с тем, являясь контуром высокой добротности, он имеет большое время установления колебаний, поэтому управляющее гетеродинное напряжение нарастает по амплитуде и сдвигается по фазе постепенно в течение 20 мкс. Это время определяет инерционность автокомпенсатора (АКП).
Конечное время раскачки колебаний в узкополосном фильтре определяет инерционность работы АКП. Инерционность работы АКП, с одной стороны, должна обеспечить прохождение через сумматор полезных кратковременных эхо-сигналов основного канала, т.е. исключить их подавление из-за раскачки узкополосного фильтра. С другой стороны, раскачка не должна быть значительной, чтобы не было остатков не скомпенсированных помех в начале их действия и чтобы схема АКП своевременно реагировала на изменение амплитуды и фазы помех основного и компенсационного каналов в процессе вращения антенны и перемещения помехоносителя.
По мере вращения антенны РЛС изменяются амплитуда и сдвиг фаз сигналов помехи на входах основного и компенсационного каналов в соответствии с диаграммами направленности антенн. Однако ввиду наличия корреляционной обратной связи система само регулируется так, что US всегда остается минимальным.
Действительно, при возрастании амплитуды помехи в основном канале U0 и уменьшении сдвига его по фазе относительно сигнала помехи в компенсационном канале U1 не скомпенсированный остаток на выходе сумматора возрастет от минимального первоначального значения и получит измененную фазу. По цепи корреляционной обратной связи он изменит амплитуду и фазу управляющего гетеродинного напряжения, что приведет к изменению амплитуды и фазы сигнала помехи компенсационного канала на входе сумматора. Этот процесс будет продолжаться, пока амплитуда и фаза сигнала помехи компенсационного канала не изменятся на ту же величину, что и в основном канале, и результирующее напряжение сумматора не вернется к минимальному исходному US.
Таким образом, при работе автокомпенсатора в результирующей диаграмме направленности антенной системы в направлении на постановщик помех создается минимум приема, причем при вращении антенны направление минимума приема сохраняется для всех положений, кроме направления на постановщик помех главным лепестком. Эффект воздействия автокомпенсатора в последнем случае проявляется в сжатии сектора эффективного подавления, так как на срезах главного лепестка, где амплитуда помехи по основному каналу сравнима с сигналами помехи компенсационного канала, возможны ее компенсация или ослабление. Таким образом, в схеме АКП осуществляется автоматическая настройка на минимум помехи на выходе сумматора.
Поскольку коэффициент передачи управляемого усилителя регулируется цепью корреляционной обратной связи по выходному эффекту, т.е. по остатку помехи, то коэффициент передачи цепи будет несколько отличаться от оптимального. Вследствие этого на выходе автокомпенсатора всегда будет какая-то ошибка – не скомпенсированный остаток помехи. Она может быть уменьшена за счет увеличения коэффициента усиления цепи корреляционной обратной связи. Однако чрезмерное увеличение неизбежно приведет к самовозбуждению АКП, что и наблюдается в процессе настройки автокомпенсатора при выполнении лабораторной работы.
Наиболее эффективное подавление активных шумовых помех автокомпенсатором обеспечивается в том случае, когда число компенсационных каналов равно числу одновременно действующих групп постановщиков помех. Исследуемый автокомпенсатор РЛС содержит два компенсационных канала и обеспечивает уверенное подавление помех двух групп постановщиков, действующих одновременно с разных направлений.
