
Жестовая система управления может обеспечить работу человекоподобного робота или робота на колесной базе в ситуациях или местности опасной для человека, которому нет необходимости находится в данной зоне во время работы, все функции робот может выполнять так же как оператор им управляющий.
Для первого прототипа проводится сборка двух модулей робота на колесной базе и перчатки управления. При постановке цели работы, встал вопрос выбора аппаратных компонентов для реализации. На сегодняшний день существует множество различных микроконтроллерных плат, например, Arduino, Raspberry Pi, Wemos, STM, с помощью которых можно создать жестовую систему управления. Помимо этого, важным компонентом является трех-осевой акселерометр для отслеживания движений и положения руки в пространстве. А для передачи управляющих воздействий на исполнительные устройства, система должна включать модуль передачи данных такие как UART или ESP. Для работы моторов робота на колесной базе потребовались драйвера и управляющая плата к ним.
Исходя из источника питания колесной базы и обеспечения надлежащей работоспособности, была выбрана плата расширения L293D Motor Driver Shield (рис.1), так как на готовой колесной базе установлены два моторчика и, соответственно, понадобились драйвера с разделением управления, задняя колесная база в данном случае управляет движением вперед, назад, передняя - вправо, влево. Модуль L293D представляет собой четыре сильноточных драйвера из половин Н-мостов. Он может управлять двунаправленными приводами с токами до 600 мА и напряжениями от 4,5 В до 36 В. Микросхема предназначена для управления индуктивными нагрузками, такими как реле, соленоиды, двигатели постоянного тока, шаговые двигатели [1].
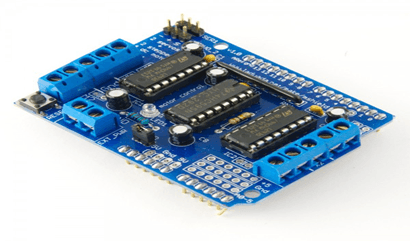
Рис. 1. Плата расширения L293D Motor Driver Shield
При выборе модуля передачи данных также встал вопрос о том, какой канал связи выбрать и какой модуль лучше использовать, и, к сожалению, от использования радиосигнала пришлось отказаться в связи с его незащищенностью. Отдельное программное обеспечение на защиту канала от помех и вмешательства извне, на данном этапе разработки делать не целесообразно, в будущем при доработке проекта за разработчиками остается такая возможность. Как итог, в первом прототипе системы используется модуль передачи Wi-Fi, а для его реализации были выбраны платы ESP-2M (рис. 2), платы достаточно простые в управлении и бюджетно выгодные.

Рис. 2. Wi-Fi модуль ESP-2M
Самым трудным вопросом при проектировании данной системы стал выбор микроконтроллерных плат и до последнего момента основной выбор стоял за платами Arduino. Но изучив основные характеристики плат STM, был сделан вывод, что за те же деньги получается в два раза превышение характеристик чем у Arduino. Платы STM доступнее по ценовой категории и обладают характеристиками, превышающими начальные требования к системе, что дает залог на будущие доработки проекта по желанию разработчика. В итоге для модуля робота на колесной базе была выбрана STM32F103C8T6 [2] (рис.3, а), а для модуля перчатки STM32F407 Discovery [3] (рис.3, б). Последняя плата обладает нужным встроенным трех-осевым акселерометром.
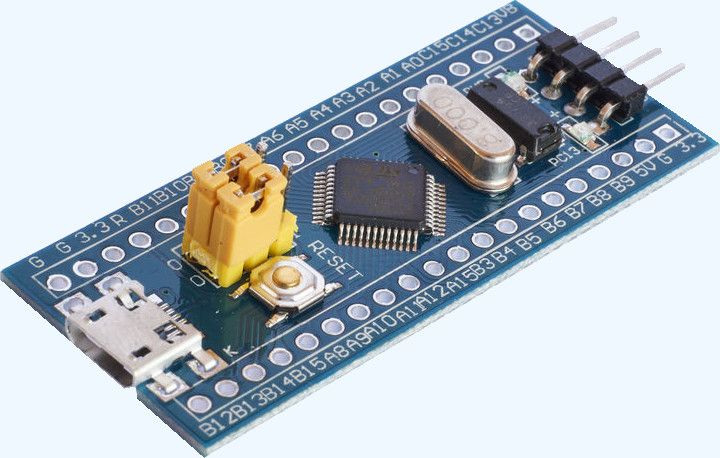
а) STM32F103C8T6

б) STM32F407 Discovery
Рис. 3. Микроконтроллерные платы STM32
При сборке робота на колесной базе использовалась макетная двусторонняя плата, что позволило избежать громоздкой конструкции и избавится от большого количества торчащих проводов. Два моторчика с колесной базы подключаются к первому и третьему полумосту управляющей платы с драйверами. На плате L293D Motor Driver Shield присутствует 2 драйвера и сдвиговый регистр управления, с регистра идет подключение к плате STM32 четыре порта: Latch, CLK, Ser, En, в обратную сторону подключение осуществляется с порта питание 5v. На плате STM32 назначаются порты А6 на En, А7 на Ser, A5 на CLK, A4 на Latch, все порты настроены на выход как GPIO порты. Земля и питания у этих двух плат общие и идут от трех батареек общим напряжением 4,5v, для подключения оба провода были распаяны на два пути. С платы ESP к плате STM идет подключение по портам RX, TX, VCC, GND, Reset. Плата STM32 имеет три интерфейса UART, для подключения берется первый интерфейс, на портах А10, А9. Reset выводится на свободный вход А11, земля и питания идут с портов GND и 3,3v.
Сборка модуля перчатки проще в аппаратной части, подключение платы ESP к плате STM ничем не отличается от предыдущего модуля. Вопрос внешнего питания платы был решен за счет платы питания Arduino и переходника на батарейку Крона. Вся система устанавливается на тканевую прорезиненную перчатку и крепление на основе ремней на запястьях. Подключение портов модуля перчатки представлено в таблице ниже.
Таблица
Подключение портов
|
Плата STM32F407 Discovery |
Плата ESP-2M |
|---|---|
|
3,3v |
VCC |
|
GND |
GND |
|
A2 |
RX |
|
A3 |
TX |
|
A8 |
Reset |
Так же были составлены две структурные схемы, которые представляют сборку аппаратных компонентов (рис. 4 и 5).
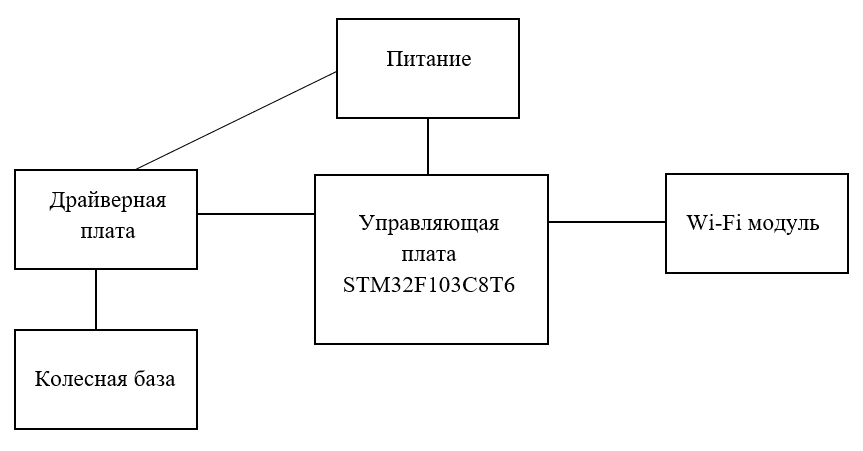
Рис. 4. Структурная схема робота на колесной базе

Рис. 5. Структурная схема перчатки управления
На основе проведенного анализа аппаратных компонентов и изучения всей сопроводительной документации, были составлены две структурных схемы. Так же была произведена сборка и подключение всех аппаратных компонентов.
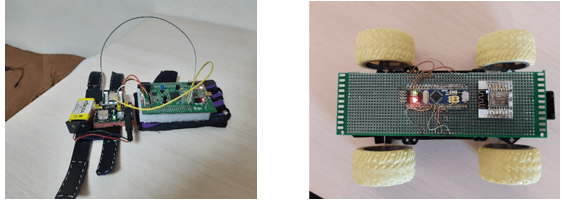
Рис. 6. Прототип жестовой системы управления
В результате разработки были спроектированы два модуля обеспечивающие работу жестовой системы управления (рис. 6).
