При решении радионавигационной задачи используется дальномерный метод, основанный на измерениях псевдодальности (Ri) между i-ым навигационным космическим аппаратом (НКА) и навигационным приемником. Для повышения точности решения используется весовой МНК, причем выбор весов является предметом исследований [1, 2]. В частности, для устранения аномальных выбросов псевдодальности до отдельных НКА путем коррекции соответствующих весов используется метод RAIM [2]. Целью статьи является исследование влияния весовой обработки в методе RAIM на точность решения навигационной задачи.
Номинальные псевдодальности Pi приемника до НКА определяются по формуле:
 (1)
(1)
где xi, yi, zi – координаты i-го НКА, x0, y0, z0 – номинальные координаты навигационного приемника, c – скорость света, Δt – разница шкал времени навигационной системы и приемника.
Весовой МНК описывается выражением [3]:
 , (2)
, (2)
где A – матрица направляющих косинусов, P – вектор-столбец номинальных псевдодальностей, R – вектор-столбец измеренных псевдодальностей, W – весовая матрица.
Весовая матрица W определяется следующим образом:
 (3)
(3)
где diag – функция, формирующая диагональную матрицу с элементами на главной диагонали.
Отношение С/N0 несущей к шуму является ключевым параметром при анализе характеристик навигационных приёмников. Данная модель в основном применяется для уменьшения эффекта многолучевого распространения и описывает дисперсию  фазы несущей как функцию от С/N0:
фазы несущей как функцию от С/N0:
 , (4)
, (4)
где k=1, 2, …, n – номер спутника, n – максимальное количество спутников.
Данный метод справедлив при известных значениях С/N0. Когда эти значения определить невозможно, есть возможность корректировать веса при помощи метода автономного контроля целостности RAIM. В данном методе псевдодальность представляется как линейная функция поправок к координатам текущего местоположения. Невязку r псевдодальностей можно найти как разницу между линеаризованными измерениями (разница между измеренными R и номинальным P значениями псевдодальности):
 . (5)
. (5)
Нормированный остаток v может быть сформирован:
 , (6)
, (6)
где  – оценка вектора усредненной дисперсии [2]:
– оценка вектора усредненной дисперсии [2]:
 , (7)
, (7)
где median – функция, определяющая медианное значение массива.
Существует более 10 видов счетных функций оценки. Для эксперимента рассмотрим счетную функцию d Коши [2]:
 , (8)
, (8)
где k=2,3849 – постоянный параметр.
Уточненная счетной функцией d матрица  весов, используемая в дальнейшем в МНК (2), рассчитывается следующим образом:
весов, используемая в дальнейшем в МНК (2), рассчитывается следующим образом:
 . (9)
. (9)
Алгоритм, описанный выражениями (2) и (9), реализован программно. На рисунке представлена градиентная траектория, а также показано положение спутников относительно навигационного приемника (точками обозначены спутники, а приемник – крестом).
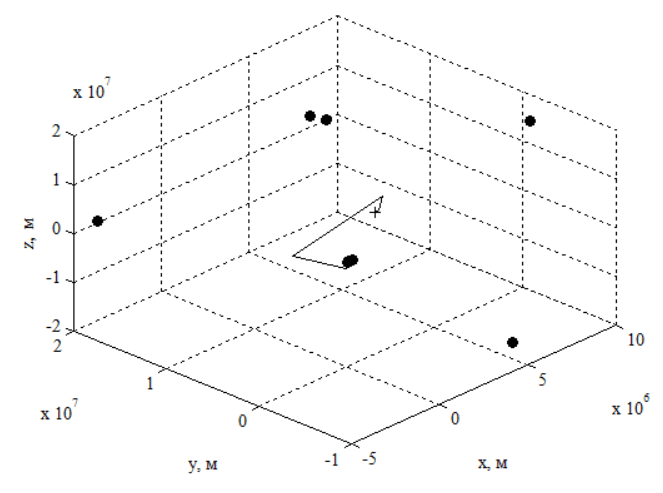
Рис. Градиентная траектория сходимости алгоритма
Оценка координат с помощью разработанного алгоритма сходится к истинному значению.
Произведён сравнительный анализ точности алгоритма с весовой и без весовой обработок, а также весовой обработки с коррекцией функцией Коши. Результаты измерений приведены ниже (табл. 1). Проведены 7 серий, по 2000 экспериментов с использованием следующей модели внесения нестабильностей расстояний:
R=R+dr, (10)
где dr – вектор нестабильности расстояний.
Для каждой серии вектор нестабильности задавался отдельно и не менялся на протяжении всей серии.
Таблица 1
Сравнение эффективности МНК
|
№ серии |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|---|---|---|---|---|---|---|---|
|
СКО, м |
0,51 |
0,60 |
0,59 |
0,62 |
0,47 |
0,47 |
0,54 |
|
СКОвзвеш., м |
0,47 |
0,50 |
0,56 |
0,56 |
0,42 |
0,39 |
0,50 |
|
СКОвзвеш. с корр., м |
0,45 |
0,52 |
0,53 |
0,58 |
0,40 |
0,35 |
0,51 |
|
∆1, % |
7,8 |
16,6 |
5,1 |
9,7 |
10,6 |
17,0 |
7,4 |
|
∆2, % |
11,8 |
13,3 |
10,2 |
6,5 |
14,9 |
25,5 |
5,6 |
Весовой метод обработки данных дает меньшее СКО оценки координат приемника, чем обработка без весов. Средний выигрыш взвешенного МНК ∆1 составляет около ∆1=10,6 % относительно обычного МНК. При дополнительной коррекции весовых коэффициентов функцией Коши средний выигрыш в уменьшении СКО ∆2 составляет около ∆2=12,5 %.
Исследована возможность МНК с дополнительной коррекцией противостоять искажениям параметров единичных спутников. Для этого в выражении (10) варьированы геометрические расстояния отдельных спутников. Результаты эксперимента представлены в таблице (табл. 2).
Таблица 2
Зависимость СКО от количества спутников с вариациями геометрических расстояний
|
Искаженные псевдодальности |
3 |
2 |
1 |
0 |
|---|---|---|---|---|
|
СКОвзвеш., м |
15,6721 |
15,2481 |
7,2086 |
0,5473 |
|
СКОвзвеш. с корр., м |
12,4891 |
12,9507 |
0,7432 |
0,5361 |
|
∆1, % |
20 |
15 |
9 |
2 |
Видно, что взвешенный МНК с коррекцией имеет явное преимущество, которое в среднем составляет 11,5 %. Лучше всего алгоритм с коррекцией проявляет себя при устранении единичной ошибки (выигрыш около 20 %). При увеличении числа спутников с искаженной псевдодальностью эффективность алгоритма с дополнительной коррекцией снижается.
