Силовая импульсная техника имеет широкое применение в горной, строительной технике и других областях техники. Приборы и грунтовые зонды (пенетраторы) основаны на механике редкоударных приводов с механизмами преобразования вращательного движения в возвратно-поступательное.
Такие механизмы можно использовать в различных устройствах для исследования физических и механических свойств грунтов земного и космического происхождений, зондирования грунтов для производства строительных работ, испытания материалов на твердость, в копрах, инструментах для клёпки и клеймения, в канатных подъёмниках, и в прочей импульсной механике [1, 3, 5].
Работа одного из видов редкоударных приводов основана на циклическом растяжении ударной пружины, нижний конец которой жестко закреплен на наконечнике снаряда, отпускании её свободного конца, производстве удара пружины по наконечнику за счет эффекта схлопывания витков, повторному захвату, растяжению и т.д. Замкнутые пружины растяжения обладают определенными особенностями. Во-первых, их витки первоначально замкнуты с некоторым усилием (натягом). Иными словами, их упругая характеристика начинается не с нуля, а с некоторого суммарного усилия, с которым предварительно сжаты витки. Во-вторых, при растяжении такой пружины, один из концов которой зафиксирован, и внезапном отпускании её свободного конца, витки пружины схлопываются со значительным ударным усилием, вектор которого направлен на зафиксированную точку, т.е. на наконечник. Такая механика ударов приводит к тому, что пенетратор как бы сам себя забивает в грунт [1,4].
Схема зонда на основе ударной пружины растяжения приведена на рис. 1. Вся механика смонтирована в цилиндрическом корпусе 1 и приводится в действие от мотор-редуктора 2 с муфтой 3. Подвод энергии производится через кабельную бухту 4, уложенную в специальном отсеке. По мере продвижения снаряда происходит разматывание бухты. Вращательное движение передается преобразовательному механизму 5 возвратно-поступательного движения. Шток данного механизма несет захватно-спусковое устройство 6, рычаги которого, при ходе вниз захватывают грибок 7 ударной пружины 8, а при ходе назад разводятся упорами 9 и отпускают пружину. Последняя смыкается, производя своей массой ударный импульс по наконечнику 10. Шток механизма 5 и захватно-спусковое устройство 6 удерживаются от вращения направляющей шпонкой 11. Схлопывание пружины обеспечено тем, что она выполнена с замкнутыми витками, которые плотно прижаты друг к другу силой предварительного натяга.
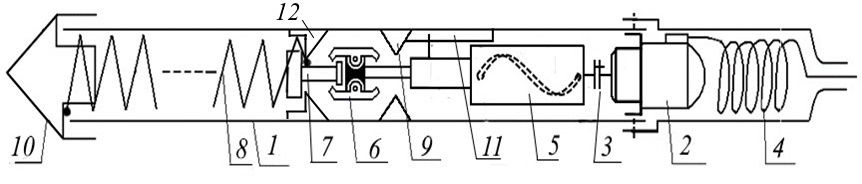
Рис. 1. Схема импульсного пенетратора с приводом возвратно-поступательного движения и ударной пружиной
От выпадения пружины 8 и наконечника 10 предохраняют упоры 12. Для обеспечения первоначального положения снаряда необходимо не только поставить его в рабочую точку, но и создать определённое усилие для предварительного вдавливания. Эти действия производят установочные манипуляторы.
Рассмотрим работу преобразовательного узла, который обеспечивает периодическое растяжение ударной пружины. Внутри корпуса 1 закреплена гильза 2, внутри которой по шпоночному пазу возвратно-поступательно перемещается шток 3. Линейное перемещение штока обеспечивает кулачково-винтовой механизм, состоящий из винта 4 и кулачковой гильзы 5. Они вращаются совместно от муфтового конца 6 мотор-редуктора снаряда (рис.1). В левом конце штока 3 имеется переключающий штифт 7, занимающий два крайних положения: верхнее, когда он входит в паз нарезки винта 4 (разрез А-А), и нижнее, когда он связывает шток 3 с внутренним кулачковым пазом гильзы 5 (разрез Б-Б). Положения штифта фиксируются шариком и пружинкой. Нарезка винта 4 правая, а кулачкового паза – левая. Переключение положений штифта обеспечивается нисходящими конечными участками нарезок винта и гильзы. Таким образом при правом вращении винта и кулачка шток 3 втягивается внутрь гильзы 5. В конце хода штифт 7 выталкивается в нитку внутренней нарезки этой гильзы, и происходит быстрый ход штока 6 влево.
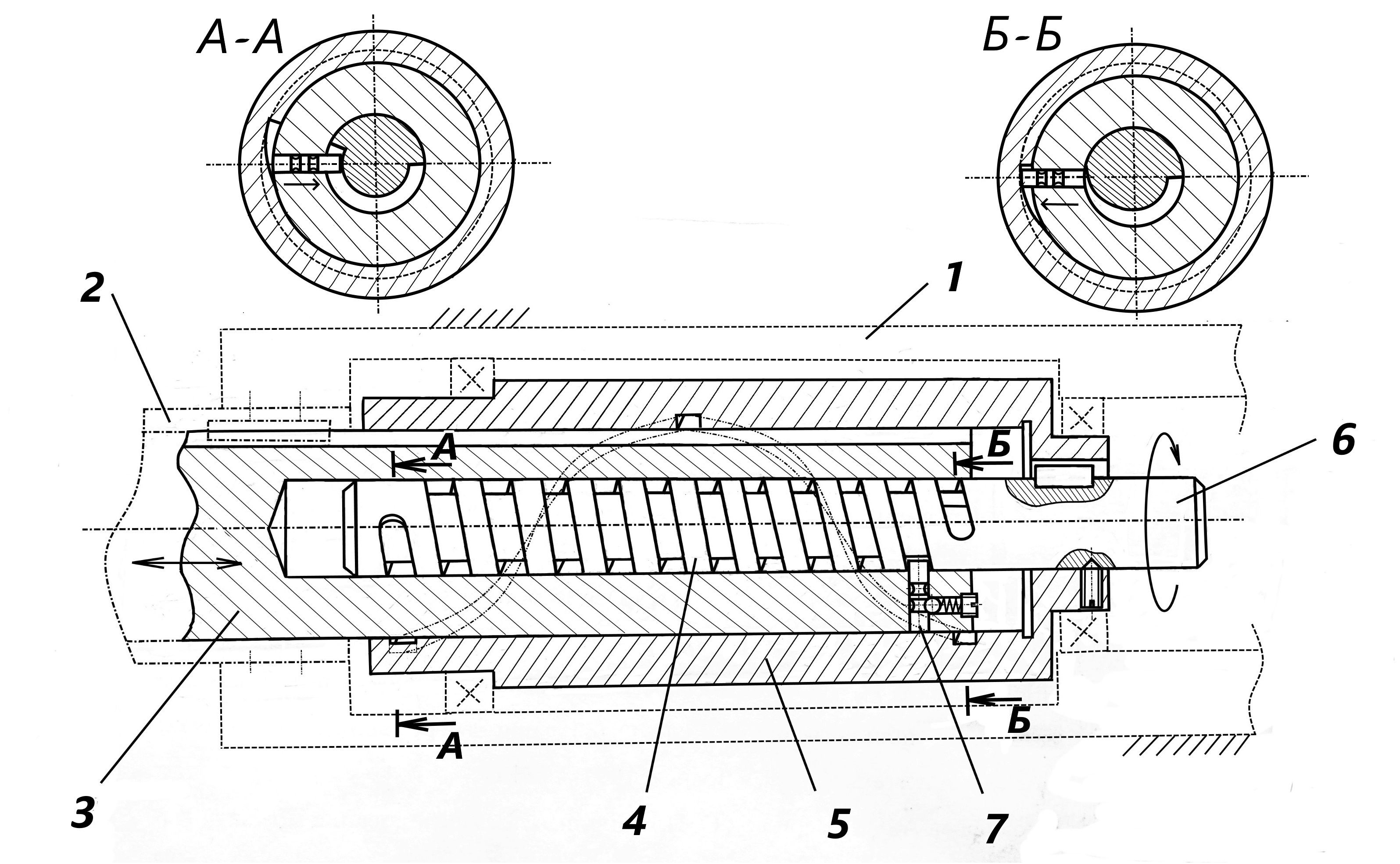
Рис. 2. Схема реверсивного возвратно-поступательного механизма управления ударной пружиной
Таким образом, если связать оба рисунка, то шток 3 механизма должен нести захватно-спусковое устройство 6 (рис.1) пружины 8. При ходе вправо, т.е. внутрь гильзы 5 (рис. 2), шток растягивает ударную пружину, а после освобождения пружины и удара, он быстро возвращается влево, грибок 7 снова захватывается и происходит повторное растяжение пружины.
Механизм преобразования вращательного движения в возвратно-поступательное расположен в корпусе снаряда 1, который несёт ударный наконечник 2. По внутренней пятке наконечника бьёт боёк 3 со стаканом 4. Боёк и наконечник жестко связаны друг с другом пружиной растяжения 5. В стакане бойка с правой стороны имеется кольцевая канавка, по которой, с помощью зацепляющего шарика 6, стакан связан с валом 7, несущим винтовую наружную нарезку 8. Вал вращается на подшипниковом узле 9. Стакан ударника 4 удерживается от вращения шлицевым пазом и штифтом 10 и ограничивается в своём движении упором 11. Шарик 6 в конце хода проваливается в канал возврата 12 внутри вала 7.
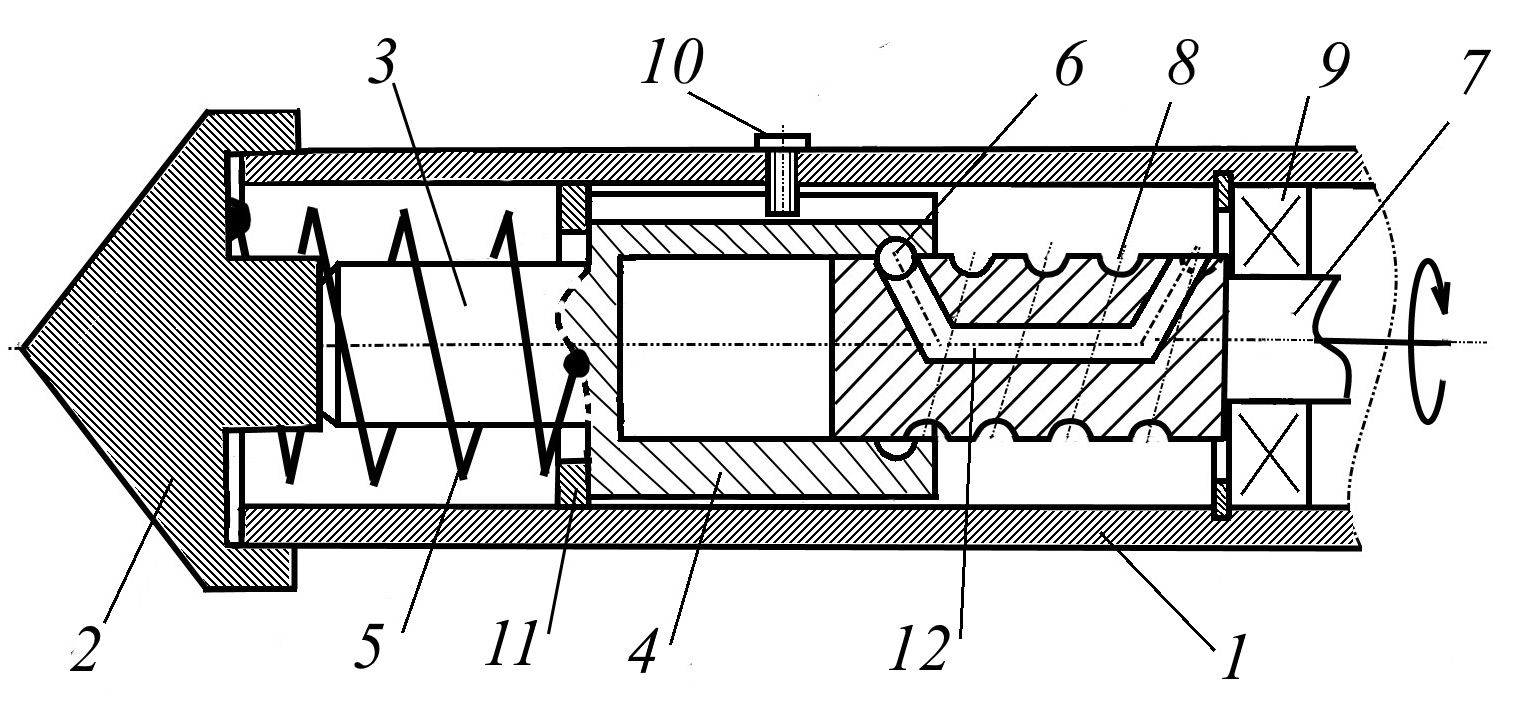
Рис. 3. Схема реверсивного шарико-винтового механизма с ударным бойком
Снаряд работает следующим образом. От приводного электродвигателя вращение передается винтовому валу 7. Шарик 6, находящийся одновременно в кольцевой канавке стакана 4 и винтовой канавке стержня, начинает перекатываться по ним, поднимаясь по винтовой канавке стержня, втягивает на себя стакан 4. Боёк 3 и стакан 4, перемещаются вправо и растягивают пружину 5. В конце хода стакана шарик попадает в верхнее отверстие осевого канала возврата шарика 12 и под действием усилия пружины проваливается в него. Зацепление стакана со стержнем нарушается, и он вместе с бойком под действием пружины наносит удар по пятке наконечника, в результате чего последний продвигается вглубь грунта. Стакан останавливается упором 11, вследствие чего совмещаются кольцевая расточка стакана и выход канала возврата стержня. Шарик, под действием собственного веса, перемещаясь по каналу возврата, снова попадает в кольцевую расточку и начальный выход винтовой канавки. Зацепление стакана со стержнем восстанавливается, цикл повторяется.
В современной технике грунтового зондирования применяются и другие ударные устройства. Например, пенетратор на основе бойка и пружины сжатия, которая сжимается вращающимся кулачком и сбрасывается провальным участком профиля, разгоняя боёк, ударяющий по наконечнику [5]. Используются и пневмоударные системы, но в основном в строительной технике [2].
