
Введение
Все элементы кинематической цепи механической части электропривода при нагрузке в той или иной степени деформируются, обладают конечной жесткостью. Этим обусловлена проблема, решения задач управления исполнительным органом, который связан с приводным устройством посредством кинематической передачи, обладающей упругими свойствами.
Simscape предназначен для создания моделей физических систем в среде Simulink. Компоненты Simscape представляют физические элементы, двигатели. Линии в модели, которые соединяют эти компоненты, соответствуют физическим соединениям в реальной системе, которые передают энергию [3]. Этот подход позволяет описать физическую структуру системы. Основные блоки для имитационного моделирование упруго-вязких элементов в механической части электропривода это Mechanical shaft и Speed reducer.
Основные блоки
С помощью блока Mechanical Shaft (Механический вал) на схеме в симулинк соединяют механический вал электродвигателя с механическим блоком нагрузки. Данный блок позволяет осуществить разъединение жёсткой связи механических параметров электропривода от параметров нагрузки. Учитываются основные механические параметры вала, коэффициент жёсткости упругой передачи и коэффициент демпфирования. Из-за влияния этих параметров в реальной физической системе возникает разница скоростей ведомой стороной вала и стороной вала соединённой с нагрузкой, относительно этого вычисляется переданный крутящий момент. Уравнение переданного крутящего момента Tl:
 (1)
(1)
В данном уравнении учитывается жёсткость вала K и внутреннее затухание B, ωm – скорость ведущей стороны, ωl – скорость стороны с нагрузкой. Где K является жесткостью вала, B является внутренним затуханием, и и являются скоростями ведущей стороны и загруженной стороны, соответственно. Схематично внутреннюю структуру модели представлена на рисунке 1.
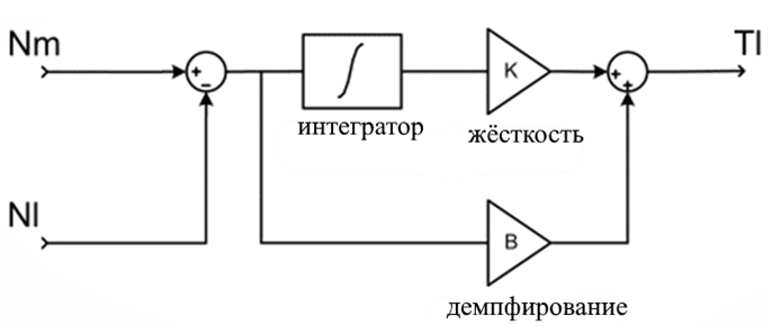
Рис. 1. Схема модели механического вала
Жесткость вала и внутреннее демпфирование вала являются настраиваемыми параметрами в данном блоке. Механические валы должны иметь очень малые угловые отклонения близкие к нулю, чтобы избежать проблем в работе подшипников, что не всегда возможно ввиду длины вала либо материала из которого сделан вал.
Блок Speed Reducer
Во многих механических установках нагрузке требуется высокий крутящий момент при низкой скорости вращения или перемещения. Для этого в машиностроении механическую нагрузку соединяют с электродвигателя с помощью редуктора скорости. Для моделирования редуктора скорости в среде Simscape существует соответствующий одноименный блок.
Схематично внутренняя структура модели показана на рисунке 2. Блок представляет из себя два вала, высокоскоростной ведомый вал и низкоскоростной ведущий которые соединены между собой посредством устройства понижающему скорость вращения согласно коэффициенту передачи.
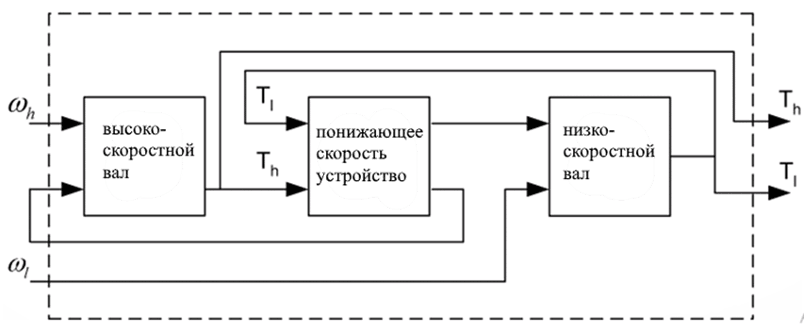
Рис. 2. Соединительная схема трех внутренних блоков блока Speed Reducer
Кроме настроек жесткости и демпфирования обоих валов, блок позволяет учитывать следующие параметры: Инерция редуктора. Инерция редуктора по отношению к высокоскоростной стороне. Эффективность - КПД редукционного устройства.
Моделирование электропривода с упруго-вязкими элементами
Произведём расчет на примере электропривода, механическая часть которого представляет собой много массовую систему с упругими связями. Электродвигатель постоянного тока с независимым возбуждением соединен с редуктором и посредством упругой муфты с валом, на который будет подаваться нагрузка. Управление производится посредством стандартной двухконтурной системы подчиненного регулирования.
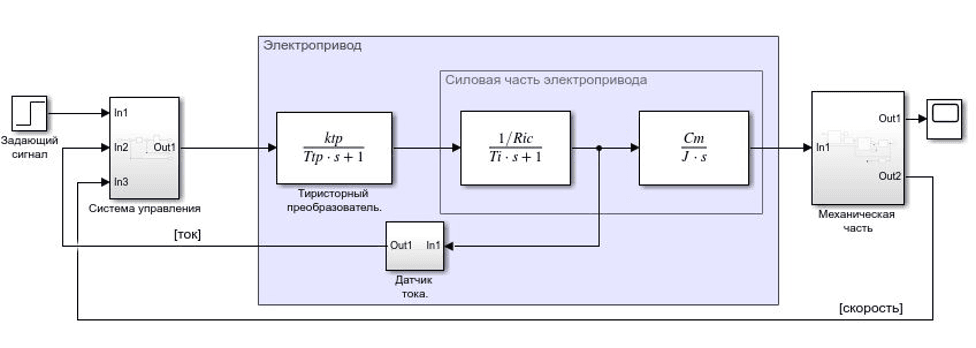
Рис. 3. Структурная схема моделирования электропривода
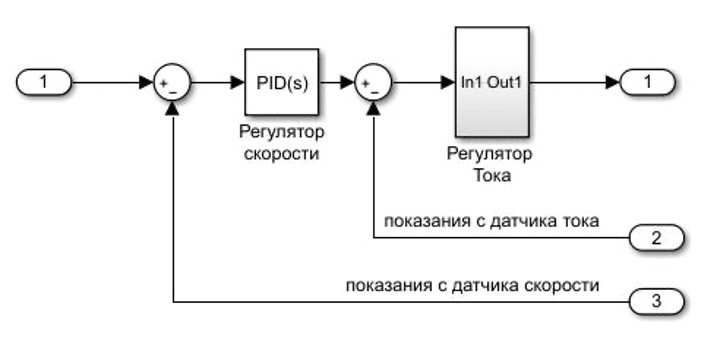
Рис. 4. Структурная схема системы управления электроприводом
Двухконтурная система подчиненного регулирования состоит из двух регуляторов. Внутренний контур регулировки тока, представленный обратной связью – датчиком тока и ПИ регулятором. Внешний контур регулировки скорости, обратной связью – датчиком скорости и ПИД регулятором.
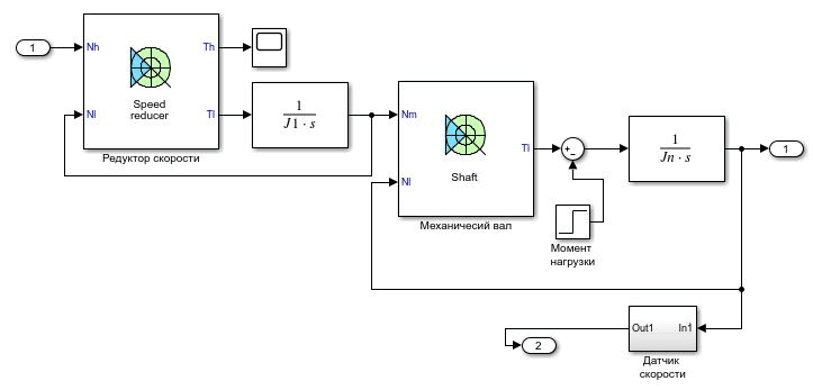
Рис. 5. Структурная схема моделирования механической части
Момент вращения с электродвигателя подаётся на редуктор. Выходной вал которого через муфту, имеющую момент вращения J1 соединен с механическим упругим валом. С помощью сумматора и момента нагрузки симулируется добавочная нагрузка во время работы электропривода примеру вода, захват рабочей детали.
Результаты симуляции представлены на рисунках 6, 7.
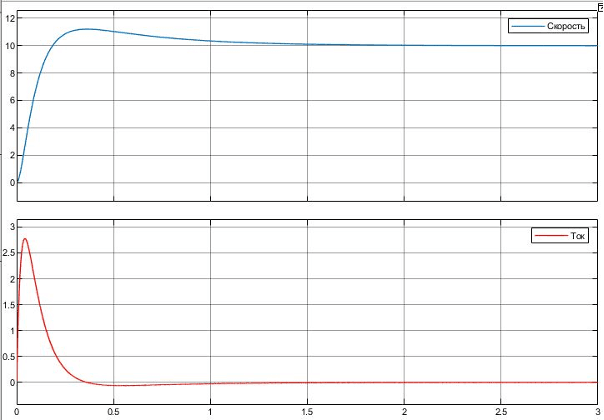
Рис. 6. Графики скорости и тока без упругой механической связи
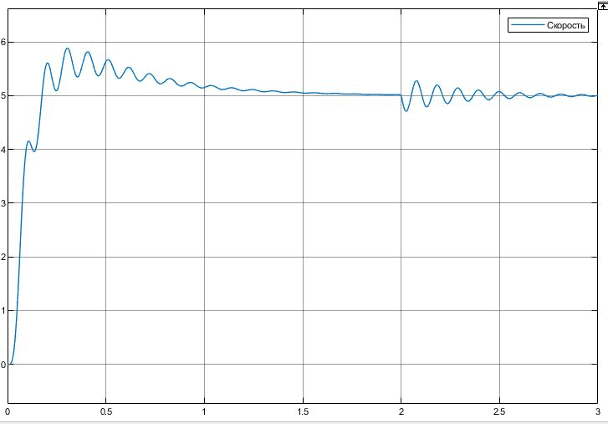
Рис. 7. График скорости при нагрузке подключенной через упругие механические связи
На рисунке семь график скорости при подключении нагрузки через редуктор, поэтому установившаяся скорость в 2 раза меньше. Из сравнения графиков видно, что при добавлении в моделирование упругих механических связей увеличивается время переходного процесса, и перерегулирование. Статическая ошибка в обоих случаях нулевая благодаря ПИД регулятору. Динамическая ошибка характеризуется перерегулированием, показатель колебательности количество полных колебаний до достижения установившегося режима. Как видим из графиков показатель колебательности при внесении в связи упругости существенно возрастает что сказывается на сроке эксплуатации оборудования и точности управления.
