Современные космические системы в радиодиапазоне, несмотря на своё разнообразие, имеют достаточно схожие характеристики, поэтому возникла необходимость в рассмотрении возможности их многофункционального использования с целью унификации устройств и уменьшения экономических затрат на создание аппаратов отдельного функционального назначения. Кроме того, современные системы связи потребовали для абонента знаний о его точной привязке к рельефу местности, а также знаний о местоположении КА для многопользовательской связи и Интернет, а это связано с использованием навигационных систем, что позволяет убрать ошибки связанные с неточностью определения координат. Помимо этого, при оптимизации радиотехнических параметров возникла необходимость многократного использования частотных диапазонов, что потребовало точной временной синхронизации для обеспечения перестройки по частоте и фазе по известным пользователю законам с целью сокрытия сигнала до уровня шумов при одновременной селекции по угловому направлению с целью улучшения энергетических характеристик и исключения влияния на другие устройства. Ниже приведён анализ такого многофункционального использования.
Так как улучшение характеристик связано с навигацией, то сначала немного истории [1]. Впервые использовать спутники для навигации предложил проф. В.С. Шебшаевич в 1957 году. Такая возможность была открыта им при исследовании приложений радиоастрономических методов в самолетовождении. После этого в ряде советских институтов были проведены исследования, посвященные вопросам повышения точности навигационных определений, обеспечения глобальности, круглосуточного применения и независимости от погодных условий. Данные исследования были использованы в 1963 году при проведении опытно-конструкторских работ над первой отечественной низкоорбитальной системой «Цикада». Для осуществления навигационных измерений каждый спутник передает непрерывный сигнал на двух фиксированных когерентных частотах в УКВ-диапазоне (близких к 150 и 400 МГц). Приёмная аппаратура «Шхуна», размещённая на судне пользователя, регистрирует изменение частоты сигналов при прохождении спутника в зоне видимости, вызванное эффектом Доплера, и по этому изменению, а также по закодированным в сигнале данным о параметрах движения спутника, рассчитывается местонахождение пользователя.
Передача навигационного сигнала на двух частотах используется для того, чтобы можно было ввести поправку на запаздывание радиосигналов при их прохождении через ионосферу Земли. В 1967 году был выведен на орбиту первый навигационный отечественный спутник «Космос-192», который обеспечивал непрерывное излучение радионавигационного сигнала на частотах 150 и 400 МГц в течение всего времени активного существования. Система «Цикада» была сдана в эксплуатацию в составе четырех спутников в 1979 году. Навигационные спутники были выведены на круговые орбиты высотой 1000 км с наклонением 83° и равномерным распределением плоскостей орбит вдоль экватора. Система «Цикада» позволяла потребителю в среднем через каждые 1.5…2 часа входить в радиоконтакт с одним из спутников и определять плановые координаты своего места при продолжительности навигационного сеанса до 5…6 мин. Навигационная система «Цикада» использовала без запросные измерения дальности от потребителя до навигационных спутников. Наряду с совершенствованием бортовых систем спутника и корабельной навигационной аппаратуры, серьезное внимание было уделено вопросам повышения точности определения и прогнозирования параметров орбит навигационных спутников. В дальнейшем спутники системы «Цикада» были дооборудованы приемной измерительной аппаратурой обнаружения терпящих бедствие объектов, оснащенных специальными радиобуями. Их сигналы принимались спутниками системы «Цикада» и ретранслировались на специальные наземные станции, где производилось вычисление точных координат аварийных объектов (судов, самолетов и др.). Дооснащенные аппаратурой обнаружения терпящих бедствие спутники «Цикада» входили в систему «Коспас», которая совместно с американо-франко-канадской системой «Сарсат» образовывали единую службу поиска и спасания «Коспас-Сарсат», на счету которой уже несколько тысяч спасенных жизней. Создавалась КНС «Цикада» (и её модернизация «Цикада-М») для навигационного обеспечения военных потребителей и эксплуатировалась с 1976 года. После 2008 года потребители КНС «Цикада» и «Цикада-М» были переведены на обслуживание системой ГЛОНАСС и эксплуатация этих систем была прекращена. Выполнить требования большого числа потребителей низкоорбитальные системы в силу существовавших тогда принципов, заложенных в основу их построения, не могли. Успешная эксплуатация низкоорбитальных спутниковых навигационных систем морскими потребителями привлекла широкое внимание к спутниковой навигации, что обусловило необходимость создания универсальной навигационной системы, удовлетворяющей требованиям подавляющего большинства потенциальных потребителей.
Недостатки системы «Цикада»:
- Требует независимого задания скорости приёмника.
- Даёт только 2 координаты.
- Погрешность определения координат более 100 метров.
В связи с параметрами орбиты определение координат возможно только в течение 5-6 минут с интервалом от одного до полутора часов;
Существует достаточно много методов навигации, которые описаны в [2], но распространение получили разностно-дальномерные методы с наличием КА на геостационарных орбитах. Поэтому детально рассмотрим принцип функционирования системы ГЛОНАСС [3], которая пришла на смену, и выявим её преимущество и недостатки по сравнению с другими системами.
Задача системы навигации заключается в выделении сигнала по коду и передаче информации для выстраивания оптимального определения местоположения. Оптимальная когерентная обработка сигнала при наличии информации, заложенной при фазовом манипулировании с выделением необходимых параметров по частоте Доплера, осуществляется с помощью схемы Костоса [4], рисунок 1.

Рис. 1. Фазовая автоподстройка частоты по схеме Костоса
Здесь, с выхода усилителя промежуточной частоты (УПЧ) сигнал  поступает на фазовый дискриминатор, куда с другой стороны подаётся опорное напряжение
поступает на фазовый дискриминатор, куда с другой стороны подаётся опорное напряжение  . Фаза несущей частоты элементарных радиоимпульсов опорного напряжения отличается от фазы импульсов сигнала на ϕ. Близость времени запаздывания сигнала и опорного напряжения поддерживается системой АПВ (автоматическая подстройка по времени прихода). Фазовый дискриминатор имеет два канала, отличающиеся тем, что их опорные напряжения сдвинуты по фазе на π/2, т.е. находятся в квадратуре. Каждый из каналов представляет собой умножитель сигнала на опорное напряжение. Вырабатываемые ими напряжения фильтруются в фильтрах нижних частот (ФНЧ) в результате чего образуются квадратурные составляющие (I и Q) сигнала рассогласования по фазе. В связи с тем, что исходный дальномерный сигнал
. Фаза несущей частоты элементарных радиоимпульсов опорного напряжения отличается от фазы импульсов сигнала на ϕ. Близость времени запаздывания сигнала и опорного напряжения поддерживается системой АПВ (автоматическая подстройка по времени прихода). Фазовый дискриминатор имеет два канала, отличающиеся тем, что их опорные напряжения сдвинуты по фазе на π/2, т.е. находятся в квадратуре. Каждый из каналов представляет собой умножитель сигнала на опорное напряжение. Вырабатываемые ими напряжения фильтруются в фильтрах нижних частот (ФНЧ) в результате чего образуются квадратурные составляющие (I и Q) сигнала рассогласования по фазе. В связи с тем, что исходный дальномерный сигнал  имеет манипулирование по фазе сообщением Dc(t), составляющие сигнала ошибки I и Q изменяют свой знак в такт с информационными символами сообщения Dc(t). Для устранения этого влияния используется операция умножения I×Q, в результате чего сигнал ошибки освобождается от модуляции символами сообщения. Проанализируем правило формирования ошибки. Сигналы и квадратурные опорные напряжения на входе умножителей 1 и 2 (рисунок 1) будем считать гармоническими
имеет манипулирование по фазе сообщением Dc(t), составляющие сигнала ошибки I и Q изменяют свой знак в такт с информационными символами сообщения Dc(t). Для устранения этого влияния используется операция умножения I×Q, в результате чего сигнал ошибки освобождается от модуляции символами сообщения. Проанализируем правило формирования ошибки. Сигналы и квадратурные опорные напряжения на входе умножителей 1 и 2 (рисунок 1) будем считать гармоническими  ,
,  ,
,  . Тогда на выходах умножителей получим:
. Тогда на выходах умножителей получим:
 (1)
(1)
 (2)
(2)
На выходах ФНЧ:
 (3)
(3)
 (4)
(4)
Сигнал ошибки:
 (5)
(5)
Нечто подобное было предложено в цифровой форме в системе навигации GPS [5] и ГЛОНАСС, рисунок 2.

Рис. 2. Схема цифровой обработки, применяемая в системах GPS и ГЛОНАСС
При этом принцип подстройки основан на выделении сигнала по коду длительностью для GPS в 1023 импульса в 1 Мбит/сек и для ГЛОНАСС в 511 импульсов в 0,5 Мбит/сек. Соответственно при этом возможное смещение по доплеровской частоте относительно основной несущей частоты должно быть не более 500 Гц, так как изменение фазы из-за частоты Доплера в течении 1 млсек не позволяло правильно накапливать сигнал для подстройки по коду. Именно поэтому в системе GPS со спутников навигации используется передача сигнала на одной несущей частоте с использованием приёма сразу нескольких кодовых сигналов от 3-4 спутников с учётом того, что один из них будет обязательно захвачен на сопровождение. А далее по нему априорно выставляется доплеровское смещение частоты для других спутников. Понятно, что с системой ГЛОНАСС ситуация сложнее, так как используются разные несущие частоты с одним общим кодовым сигналом. Здесь приходится ждать пока спутник не окажется в нужной полосе доплеровских частот. Поэтому, так как используется общая микросхема иностранного производства для навигации, то при таком подходе, с использованием одинаковой цифровой обработки, система ГЛОНАСС уступает системе GPS по точности и времени подстройки в силу того, что накопление сигнала в 2 раза меньше и требуется иметь перестройку частоты с захватом по доплеровской частоте на каждый спутник для приёма кодового сигнала, который один на все спутники. При этом, как и в системе GPS подстройка по доплеровской частоте может вестись только после подстройки по коду. Кроме того, используется наложение на кодовый сигнал навигационного сообщения со скоростью 50 бит/сек. Суперкадр длиной 7500 бит требует 150 секунд (2,5 минуты) для передачи полного сообщения и состоит из 5 кадров по 1500 бит (30 секунд). Каждый кадр состоит из 15 строк по 100 бит (2 секунды на передачу каждой строки), 85 бит (1,7 секунды) данных и контрольных сумм и 15 бит (0,3 секунды) на маркер времени. Строки 1-4 содержат непосредственную информацию о текущем спутнике и передаются заново в каждом кадре; данные включают эфемериды, смещения тактовых генераторов частот, а также состояние спутника. Строки 5-15 содержат альманах; в кадрах I-IV передаются данные на 5 спутников в каждом, а в кадре V – на оставшиеся четыре спутника. Это означает, что на выдачу первых данных в навигаторе уходит не менее 2,5 минуты. Эфемериды обновляются каждые 30 минут с использованием измерений наземного контрольного сегмента; используется система координат ECEF[en] (Earth Centered, Earth Fixed) для положения и скорости, и также передаются параметры ускорения под действием Солнца и Луны. Альманах использует модифицированные Кеплеровы элементы и обновляется ежедневно. Система ГЛОНАСС обеспечивает определение местонахождения объекта с точностью до 2,8 метра. При этом по состоянию на 2014 год сеть наземных станций насчитывала 14 станций в России, одну станцию в Антарктиде и одну в Бразилии. Развитие системы предусматривало развёртывание восьми дополнительных станций на территории России и нескольких станций за рубежом (дополнительные станции будут размещены в таких странах как Куба, Иран, Вьетнам, Испания, Индонезия, Никарагуа, Австралия, две в Бразилии, и ещё одна дополнительная будет размещена в Антарктиде).
Защищённый сигнал повышенной точности предназначен для авторизованных пользователей, таких как Вооружённые силы РФ. Сигнал передаётся в квадратурной модуляции с открытым сигналом на тех же самых частотах, но его псевдослучайный код имеет в десять раз большую скорость передачи, что повышает точность определения координат. Хотя защищённый сигнал не зашифрован, формат его псевдослучайного кода и навигационных сообщений засекречен. По данным исследователей, навигационное сообщение защищённого сигнала L1-1602 МГц+n×0,5625 МГц (L2-1246 МГц+n×0,4375 МГц) передаётся со скоростью 50 бит/c без использования манчестер-кода, суперкадр состоит из 72 кадров размером по 500 бит, где каждый кадр состоит из 5 строк из 100 бит и требует 10 секунд для передачи. Таким образом, всё навигационное сообщение имеет длину 36000 бит и требует для передачи 720 секунд (12 минут). Предполагается, что дополнительная информация используется для повышения точности параметров солнечно-лунных ускорений и коррекции частоты тактовых генераторов. Так как значения частоты Доплера на низких орбитах превышают частоту Доплера на геостационарных орбитах более чем в 100 раз, то поэтому желательно, в качестве достижения преимущества навигационной системы ГЛОНАСС над системой GPS, использовать подстройку по доплеровской частоте не дожидаясь выделения по коду за счёт разделения сигналов спутников по частоте на 400-500 кГц, как это предложено в [6, 7], что исключает попадание несущих частот от двух спутников в один и тот же канал приёма навигационного кода. При этом, можно применить обработку радиосигнала на ПЛИС по схеме рисунок 3.

Рис. 3. Схема навигатора на ПЛИС с подстройкой по частоте Доплера вне ПЛИС
Такая схема позволяет использовать независимую подстройку по частоте и кодовому сигналу. Причём использование АЦП в 14 бит позволяет получить преимущество и в точности определения по местоположению при наличии 8192 градаций по амплитуде, так как повышение точности между дискретными тактами АЦП обеспечивается при накоплении сигнала на основе разницы амплитуд по ближайшим 3-4 выборкам тактов следующих через 152 МГц. Возможен также вариант навигатора и более простой по исполнению на рисунке 4.
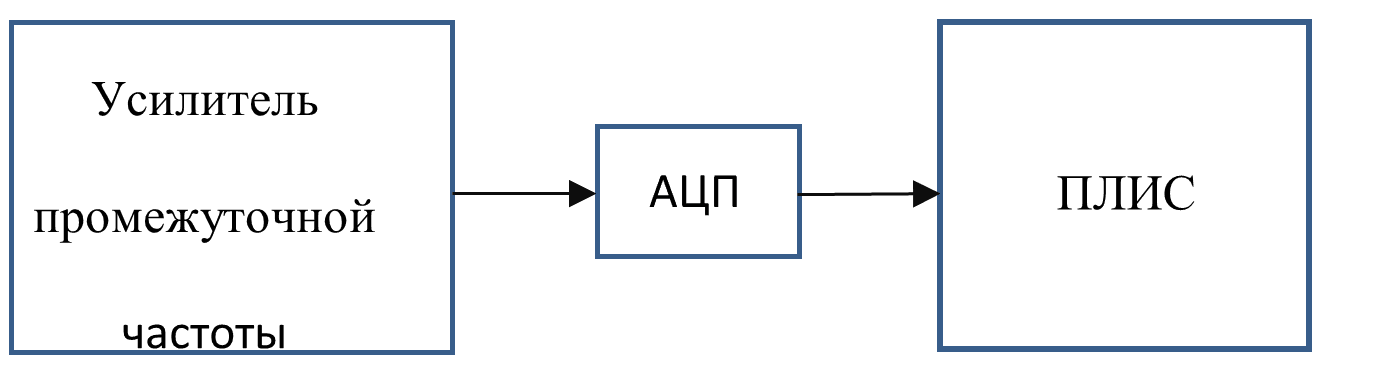
Однако в варианте рисунка 4, точность подстройки по фазе по смещению доплеровской частоты будет не 3 градуса как по рисунку 3, а порядка 45 градусов. При этом схема по рисунку 4 работает на промежуточной частоте порядка 10 МГц и скорость передачи при этом будет 3 Мбит/сек, и это не позволяет использовать импульсы в 38-40 Мбит/сек, что необходимо для Интернет. Неточность по фазе можно сократить до 11,25 градусов, но потребуется увеличить количество АЦП и ПЛИС в 4 раза со смещением тактовых импульсов в каждом АЦП на 90 градусов по отношению друг к другу. Если для навигации вариант по рисунку 4 вполне достаточен, то для Интернет нужен вариант по рисунку 3. Однако это не значит, что для выполнения частных задач, например, при телефонном способе связи (ТЛФ) с совмещением навигационных функций, нельзя использовать соответствующим переключением режимов вариант по рисунку 4, так как он требует меньшие энергетические затраты. Эта схема предпочтительна при многочастотной обработке сигналов от абонентов, что будет показано несколько ниже.
Как известно приемник GPS использует небольшие и довольно точные электронные часы. Их точность составляет 10-9с, в то время как точность атомных часов, используемых спутниками – 10-12 с. Это вызывает появление существенной ошибки в определении координат, для устранения которой необходимы дополнительные данные спутниковых измерений. В итоге, для получения точной информации необходимы данные по четырем спутникам для наземных и воздушных измерений и по трем - для морских (радиус и координаты центра четвертой сферы совпадают соответственно с радиусом Земли и координатами центра Земли.
Аналогичные проблемы оказались и для системы ГЛОНАСС, где необходимо было решить две задачи.
Первая - взаимная синхронизация спутниковых шкал времени с точностью до миллиардных долей секунды (наносекунд). Эта проблема была решена за счёт установки на спутниках высокостабильных бортовых цезиевых стандартов частоты с относительной нестабильностью 10–13 и наземного водородного стандарта с относительной нестабильностью 10-14, а также создания наземных средств сличения шкал с погрешностью 3…5 нс. Понятно, что погрешность в 3-5 нсек (330-200 МГц) не может дать точность определения местоположения выше 0,9 -1,5 метра, если не учитывать амплитуду накопленных выборок с использованием сплайнов по 3-4 выборкам. Второй проблемой является высокоточное определение и прогнозирование параметров орбит навигационных спутников. Данная проблема была решена в результате проведения научных работ по учету факторов второго порядка малости, таких как световое давление, неравномерность вращения Земли и движение ее полюсов и т.п. Однако, требования к стабильности частоты в системе ГЛОНАСС выше в 10 раз по сравнению с GPS.
К недостаткам системы GPS и ГЛОНАСС можно отнести:
- Необходимость использования раз и навсегда одних и тех же кодов и частот, что снижает их помехозащищённость, так как расположение станций помех на низких орбитах позволяет пере излучать такие коды на соответствующих частотах, что приводит к полной потери возможности определять местоположения объектов.
- Накопление кода в 1 млсек с последующим сбрасыванием и использованием накопленных выборок для дальнейшей фазовой автоподстройки, даёт худшие характеристики по фазовой автоподстройке, чем, например, непрерывная цифровая фильтрация выборок с тактовой частотой 38 МГц из-за отсутствия мгновенной динамики реагирования на ошибку. Например, чтобы обеспечить первоначальную подстройку по частоте в 1 кГц надо иметь выборки для подстройки не реже чем через 4 кГц исходя из формирования дискриминационной характеристики с частотой в 4 кГц.
- Отсутствует возможность реализовать метод отдельной начальной подстройки по частоте и коду, которая реализована в [6, 7], что не позволяет обеспечить подстройку за 100-300 мксек, а это необходимо для исключения влияния движения абонента на точность расчёта местоположения при использовании суммарно-разностного дальномерного метода, который позволяет сократить количество одновременно наблюдаемых спутников.
- Такое накопление в ГЛОНАСС и GPS в течение 1 млсек со сбросом исключает её использование для подстройки по доплеровской частоте на низких орбитах, так как для низкоорбитальных спутниковых систем навигации скорость изменения частоты по Доплеру может составлять 1 кГц/сек при изменении самой частоты от нуля до 150 кГц. То есть за 1 млсек частота Доплера выйдет из петли обратной связи ФАПЧ.
- Принцип непрерывного излучения навигационных спутников на геостационарных орбитах при обслуживании одновременно многих абонентов в угловой зоне всей видимой поверхности Земли не позволяет использовать преимущество концентрации энергии для обслуживания в нужном направлении для частных абонентов с повышением точности определения координат за счёт оценки уровня накопленных сигналов от нескольких соседних выборок тактовых сигналов с использованием сплайнов.
- При геостационарной навигационной системе невозможно повышать помехозащищённость за счёт последовательной смены кодов для каждого бита информации, их длительности, а также менять несущие частоты, так как отсутствует частная линия связи с каждым абонентом.
- Непрерывное излучение при геостационарном обслуживании изначально проигрывает запросно-ответной системе низкоорбитальных спутников также по энергетическим параметрам из-за дальности, нет возможности излучать сигнал навигации с разнесением во времени между абонентами со сменой параметров сигнала и когда это необходимо.
- Непрерывное излучение сигналов GPS и ГЛОНАСС даёт возможность средствам радиоэлектронной борьбы (РЭБ) легко находить и определять сигнал для реализации помех, в то время как запросно-ответная система имеет минимальное время работы на абонента, узконаправленный сигнал и возможность смены, как частоты, так и кодов, что исключает нахождение такого сигнала.
- Отсутствие возможности использовать многофункциональные режимы, например, с совмещением функции связи (низкая скорость передачи информации в 50 бит/сек), навигации и дистанционного зондирования Земли.
- Невозможность абонента платить за своё конкретное пользование услугами по радионавигации.
- Отсутствие возможности определять местоположение при наличии только одного или двух КА в силу использования только разностных сигналов.
- Невозможность передавать информацию о своём местоположении близлежащим абонентам, на КА, а также командные пункты.
Поэтому, для устранения этих недостатков необходимо использовать низкоорбитальные комплексы навигации с наличием узконаправленных антенн на объекты, запрашивающие навигационные данные с возможностью гибкого использования мощности сигналов и различных кодов, частот и многофункциональных режимов.
Поэтому, для устранения этих недостатков необходимо использовать низкоорбитальные комплексы навигации с наличием узконаправленных антенн на объекты, запрашивающие навигационные данные с возможностью гибкого использования мощности сигналов и различных кодов, частот и многофункциональных режимов.
Вначале остановимся на применении варианта определения местоположения объекта (абонента) на основе низкоорбитальных комплексов по методу ГЛОНАСС. В принципе режим ГЛОНАСС возможно было бы организовать и для низкоорбитальных систем спутниковой связи (НССС), если бы одновременно было бы видно четыре спутника. Собственно в таких низкоорбитальных системах для Интернет как One Web (18×36=684 КА) и Starlink (12000 КА) эта проблема была бы решена, если бы антенны КА этих систем имели бы пересечение секторов обзора при реализации размещения антенн с соответствующими секторами обзора по всей поверхности Земли даже на экваторе как показано на рисунке 5.
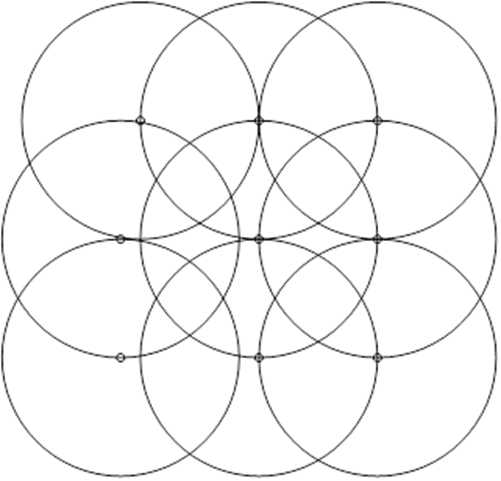
Рис. 5. Расположение пятен от спутников НСС с зоной перекрытия на широтах около полюсов Земли
Однако для функционального использования One Web и Starlink с целью обеспечения Интернет требуется поток информации до 150 Мбит/сек при ограниченном количестве спутников. Здесь требуется минимальная дальность до абонента, и используются узконаправленная антенна не только для КА, но и для абонента, и здесь уже необходимо использовать данные от GPS для направления антенны абонента на спутник. Это сужает сектор обзора и обслуживаемого пятна Земли. Именно поэтому используется большое количество КА (не менее 600-684 для One Web, вес 147,7 кг, высота 1200 км). Общая масса спутников, выводимая на орбиты, равняется 101026,8 кг. У низкоорбитальных комплексов связи, таких как Iridium, сектор обзора достаточно большой (пятно диаметром 5185,6 км при высоте 780 км, вес спутника 689 кг), но используется малое количество КА (66 КА=6 КА×11 орбит). Поэтому вариант четырёхкратного перекрытия секторов обзора наблюдается только в широтах полюсов Земли по рисунку 5. Однако на экваторе такое необходимое перекрытие может быть обеспечено при использовании 66 КА×4=264 КА. Это количество КА конечно меньше, чем количество КА для One Web (684) в 2,59 раза, но всё равно достаточно велико. При этом общая выводимая масса спутников Iridium на орбиты равняется 181896 кг, что почти в 2 раза выше, чем выводимая общая масса спутников One Web. Экономический проигрыш в 1,2 раза сохраняется даже если учесть энергетические затраты по разнице высот выведения спутников. Но минимальное количество одновременно видимых КА от абонента для определения местоположения с учётом пересечения с рельефом местности (привязка к рельефу местности необходима и КА для систем ГЛОНАСС и GPS) или при знании высоты полёта ЛА, в котором находится абонент, требует всего 3-х КА. И в этом случае требуется всего 198 спутников, с общей массой 136422 кг. И это уже сравнимо с вариантом One Web по общей массе и помимо связи здесь могут быть обеспечены функции по определению местоположения абонента. Если предположить вариант использования 98 КА×2=196 КА при весе одного спутника как у Iridium, то общая масса будет равняться 2×67522 кг, и даже при наличии 600 спутников One Web с учётом разницы высот выведения спутников по энергетическим затратам мы будем иметь преимущество над группировкой спутников One Web в 1,2 раза по экономической выгоде. Отсюда понятно, что для удовлетворения условиям определения местоположения объектов в любой точке Земли для НССС с выполнением многофункциональности надо искать оптимальное решение по количеству спутников, необходимому энергетическому потенциалу, угловому сектору обзора и методу определения местоположения, который позволяет сократить количество необходимых спутников для навигации. Понятно, что энергетический выигрыш получается в том случае, если луч антенны АФАР КА с максимальным коэффициентом усиления направлен на абонента, и при этом при реализации метода ГЛОНАСС и GPS на низких орбитах необходимо соблюсти максимальный угловой сектор обзора, что позволяет обеспечить перекрытие зон обслуживания. Реализацию такого КА с соответствующим размещением антенн АФАР мы показали в [6, 7], рисунок 6.
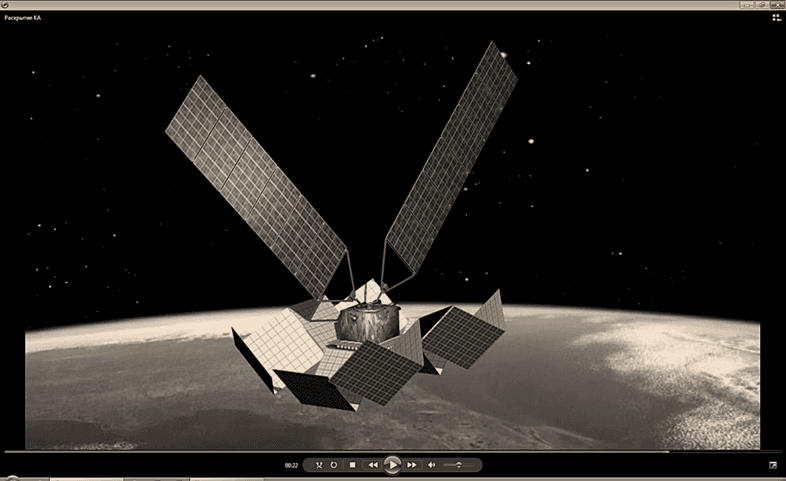
Рис. 6. Пример модели спутника для реализации способа навигации и связи при группировке в 7 КА×14орбит=98 КА с расположением антенн для обзора пятна на Земле (диаметр 4852 км при высоте 650 км) в секторе 360o по углу азимута и 150o по углу места
Мы неслучайно говорили о схожести радиотехнических параметров, так, например, сам вид кодового сигнала подобного навигационному, но для связи и при коде в 128 бит используется (скорость передачи кода 1,23 Мбит/сек), например, в космической системе связи Globalstar, а это уже наталкивает на мысль по совмещению функций, так как в системе ГЛОНАСС также используются навигационные коды для передачи информации и цель заключается в том, чтобы увеличить скорость передачи информации до длины кода, что было сделано в [6, 7]. Таким образом, проблема использования навигационной системы по методу ГЛОНАСС (GPS) с наличием связи при соответствующем энергетическом потенциале касается лишь изменения доплеровской частоты порядка 150 кГц, как показано в [6,7] с увеличением при этом скорости передачи информации до уровня необходимого для ТЛФ и видеоконференций. Понятно, что при скорости передачи кода в 38 Мбит/сек при том же количестве пользователей и скорости передачи информации как в Globalstar длина кода может достигать 3954 импульса. Отметим, что, из-за высоких значений изменения частоты Доплера более 100 кГц, и отсутствии на тот момент времени необходимой элементной базы, в таких системах как Iridium и Globalstar были вынуждены использовать для подстройки отдельно пилот-сигнал, что даёт частотную подстройку на несущей частоте передаваемой информации вместо фазовой автоподстройки, и это ухудшает соотношение сигнал/шум. Соответственно сигнал кода в 1024 бит от системы GPS тем более не мог быть схвачен для подстройки по частоте Доплера, так как вначале осуществляется подстройка по коду, а потом по частоте Доплера. Другого варианта система GPS не допускает, так как чтобы разделить сигналы от спутников по частоте Доплера надо вначале получить выделение сигнала по коду. Изменение частоты Доплера выше, чем 1 кГц, что эквивалентно накоплению кода в 1024 бита в течение 1 млсек в системе GPS разрушает код из-за смены фазы по доплеровской частоте. Поэтому необходимы технические решения, которые бы позволили убрать влияние изменения частоты Доплера в таких широких значениях. Одним из таких решений является использование расположения АФАР по рисунку 6. В этом случае при таком расположении лучей общим числом 60, в пределах одного луча происходит изменение частоты Доплера на 150 кГц/[3 антены×2 луча]=25 кГц (в Iridium используется для целей синхронизации по частоте 4 канала управления от КА на абонента и 9 каналов управления от абонентов на КА с учётом несущей частоты в 1,6 ГГц). Зная расположение антенн и лучей, можно в излучаемую несущую радиочастоту внести поправку так, чтобы в приёмном устройстве частота Доплера находилась в пределах от нуля до 25 кГц. Это позволяет использовать код длительностью всего в 20 мксек по методам навигации ГЛОНАСС и GPS, что соответствует скорости передачи информации в 50 кбит/сек (50 кГц), и такая скорость передачи информации применяется в системе Iridium. При этом подстройка по частоте Доплера в этом случае будет отличаться от метода GPS тем, что многоуровневое квантование по амплитуде и использовании цифровых фильтров с тактом в 38 МГц для накопления по методу [6, 7], вместо накопления со сбросом в 1 млсек (1 кГц), обеспечивает лучшие условия для подстройки по частоте Доплера за счёт динамики мгновенного ответа по цепи обратной связи, и это обеспечивает возможность равенства в скорости передачи информации на уровне длительности кода навигации, а не в 20 раз меньше, как в системе GPS (50 бит/сек при длительности кода в 1 млсек). То есть, использование раздельной подстройки по частоте Доплера, а затем по коду, как показано в [6, 7] позволяет улучшить характеристики по чувствительности, точности сопровождения и длительности кода. В этом случае при приёме сигналов от разных КА или абонентов используется разделение по несущей частоте, что применяется в системе ГЛОНАСС. Ещё раз напомним, что излучение сигналов на одной несущей космическими аппаратами НССС, но с разными кодами не позволяет использовать раздельный режим подстройки по частоте Доплера и кодам.
В отличие от системы связи Iridium в 66 КА (возможно и 77 КА), где каждый КА имеет 6 активных фазированных антенных решёток (АФАР) по 53 активных элемента (патч) в каждой АФАР, в КА по рисунку 6 используется 15 разнонаправленных АФАР по 256 активных элемента (патч) в каждой. Это соответствует отклонению луча узконаправленной антенны в пределах ±15° в дальней зоне. При этом с помощью АФАР системы Iridium формируется одновременно 48 лучей. В этом случае в совокупности 48 лучей формируют подспутниковую зону диаметром примерно 5185,6 км при высоте КА 780 км. Общая группировка в целом формирует квазисплошную подспутниковую зону, охватывающую поверхность Земли. При этом в системе Iridium есть также межспутниковая связь на частоте 23,18 ГГЦ -23,38 ГГц с полосой 200 МГц, что необходимо для обеспечения режима синхронизации. Всего каждый КА, для осуществления межбортовой связи, имеет 4 антенны и 4 тракта радиоэлектронного оборудования. В качестве антенн применены щелевые антенные решетки с усилением 36 дБ, управление диаграммой направленности каждой из антенн осуществляется по азимуту в пределах ±5°. План частот предусматривает размещение в полосе 200 МГц 8-ми отдельных частотных полос для исключения взаимных помех между каналами. Скорость передачи в каждой линии 25 Мбит/сек (общая скорость передачи информации 200 Мбит/сек). Есть также метод временного разделения каналов, структура кадра неизвестна.
Таким образом, видно, что при совмещении свойств НССС типа Iridium и Globalstar их КА способны в многофункциональном режиме, если, есть межспутниковая связь и осуществляется раздельная подстройка по частоте Доплера, по навигационному коду выполнять роль навигационной системы по методу ГЛОНАСС при обработке сигнала показанной в [6, 7]. Надо отметить, что при использовании узкого луча АФАР в 30 дБ одного из 15 полотен КА по рисунку 6, мы не обеспечим одновременного обзора и обслуживания абонентов в режиме навигации. В этом случае каждое полотно из 15 АФАР разбивается на 4 секторных (сегментальных) антенны по 64 активных элемента (патч) в каждом по рисунку 7.
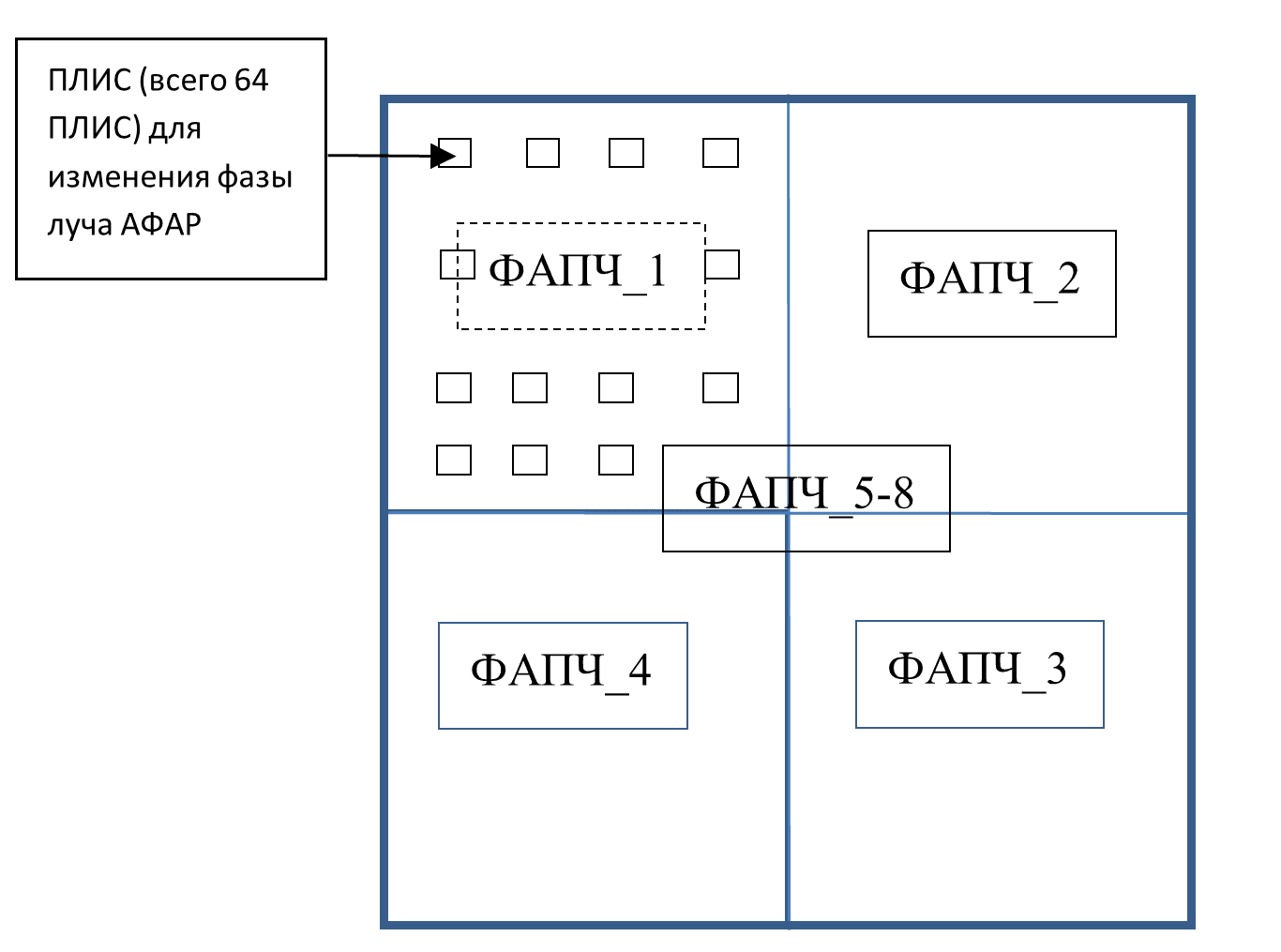
Рис. 7. Расположение ФАПЧ (рис. 3) при работе устройства по способу в режиме Iridium при 60 лучах одновременно и разбиении полотна антенны на 4 зоны по 64 элемента ПАТЧ (всего 256 активных элемента в полотне АФАР)
В результате мы получаем коэффициент усиления антенн в каждом секторе аналогично коэффициенту лучей Iridium, и имеем 60 лучей одновременно, но с тем преимуществом, что у нас нет потерь связанных с большим отклонением луча в ±60° с ослаблением энергетического потенциала в 2 раза, а также не используется схема Батлера (размер в Iridium одного полотна из 3-х 1860×860×40 мм) дающая многолучевой вариант с соответствующим уменьшением полосы пропускания антенны по частоте (в Globalstar для этих целей используется схема Бласса), что также вносит потери и не даёт возможности расширить диапазон частот до необходимых 200-300 МГц с целью исключения влияния среды на точность измерения по местоположению и снижает помехозащищённость. В варианте рисунка 6 отклонение луча от перпендикуляра к плоскости полотна антенны в дальней зоне всего ±15°.
Оценим необходимую наименьшую длительность кода для навигации. В случае навигации по методу ГЛОНАСС (GPS) требуется одновременный приём сигналов от нескольких спутников, а это означает использование антенны абонента с приёмом со всех сторон Gаб=0,5 (-3 дБ), что соответствует параметрам мобильного устройства Iridium. Надо отметить, что в системах Iridium, Globalstar, One Web, Starlink используются многочастотные режимы, что в усилителях мощности требует использование линейного режима («А»), но при этом снижается коэффициент полезного действия (КПД) в потребляемой мощности по сравнению с режимом («В») [8]. То есть, КПД выше при работе на одной частоте в усилителях мощности в режиме («В») вместо режима («А»), и это повышает коэффициент полезного действия усилителей мощности, работающих в режиме «В» (78%) в 1,625 раза больше, чем в режиме «А» (30%-48%). Собственно это видно по усилителям мощности стоящих в антенне Globalstar, которые выдают в многочастотном режиме 4,5 Вт, а в одночастотном режиме выдавали бы 4,5 Вт×1,625=7,3 Вт, при том же энергетическом потреблении, то есть, столько же, сколько мобильное устройство Iridium. Соответственно мы можем повысить мощность в лучах (порядка 30 лучей), которые работают в дальней зоне в одночастотном режиме с 8 Вт как в Iridium до 8 Вт×1,625=13 Вт. Одновременно для лучей, работающих в ближней зоне, мы это значение мощности можем снизить по сравнению с мощностью системы Iridium в 1,625 раз. Общий баланс потребляемой мощности в Iridium (8 Вт×48 лучей)/[2 скважность]=192 Вт. В одночастотном случае с учётом увеличения КПД по режиму «В» он составит (8 Вт×1,625×30 лучей+8 Вт/1,625×30 лучей)/[2 скважность×1,6,25]=165,4 Вт. Тогда, при дальности D=2500 км, и частоте f =2,7 ГГц (λ=0,111 м) с коэффициентом усиления для каждой антенны КА из четырёх в одном полотне Gпрд=251 (24 дБ), Gпрм=Gаб=0,5 (-3 дБ), при мощности передатчика на один луч Pпрд =13 Вт и отношении сигнал/шум q=20 (вероятность ошибки для ФКМ сигнала 10-5-10-6 [9], для Iridium в разговорном (телефонном) режиме (ТЛФ) это 10-3-10-4), шумовой температуре Тш=600 К, k – постоянная Больцмана, необходимая полоса частот мобильного устройства для возможного приёма кодового сигнала навигации (потока информации) вычисляется по формуле:

 (6)
(6)
Иными словами мы имеем полосу 0,1 МГц для передачи информации (минимальный код для навигации) в два раза выше, чем та, что используется в Iridium с потоком в 50 кбит/сек. Это связано с большей мощностью в дальней зоне и меньшей дальностью до пользователя. Кроме того отметим, что вариант с Gпрд=251 (24 дБ) применяется только в момент вхождения в связь, что позволяет использовать узкополосные сигналы в варианте 60 лучей одновременно, а далее используется Gпрд=30 дБ. При этом при анализе полосы в 0,1 МГц мы не учитывали преимущество из-за отсутствия потерь от диаграммо-образующих схем Батлера или Бласса и отсутствия потерь от отклонения луча в дальней зоне ±60° как в Iridium (у нас ±15°). Отсюда минимальная длительность кода для навигации 10 мксек (380 импульсов в коде), это в 100 раз меньше необходимой длительности кода в 1 млсек для ГЛОНАСС и GPS (то есть, повышение частоты Доплера на низких орбитах в 100 раз компенсируется уменьшением длительности кода также в 100 раз) и даёт возможность сочетания режима навигации и передачи информации. Иными словами сигнал навигации может восприниматься как 1 бит информации в разговорном режиме по обслуживанию абонентов в такой системе как Iridium. Это даёт многофункциональное использование, с той лишь разницей, что для навигационного сигнала будет использоваться свой код в 380 бит (напомним, что в Globalstar используется код в 128 бит). Неоднозначность по дальности от разных КА в пределах видимости, которая связана с тем что длительность кода равна 10 мксек, что составляет 3 км (для ГЛОНАСС это 300 км), может быть также решена на основе формата времени отсчёта кодов через каждые 8,28 млсек (2484 км), например, подобно тому как это осуществляется в системе Iridium, где без временной синхронизации КА и абонента невозможно обеспечить временное разделение сигналов. Из рисунка 8 можно видеть, что это эквивалентно времени выделяемого на приём (передачу) по обслуживанию одного абонента в системе Iridium в течение 90 млсек.

Рис. 8. Формат МДВР – кадра КА Iridium (UL1-UL4 – восходящие каналы, D4 – нисходящие каналы)
То есть, спутники Iridium, как и в системе ГЛОНАСС (15 бит (0,3 секунды) на маркер времени для абонента), требуют общую временную синхронизацию, и формат МДВР по рисунку 8 может быть обеспечен либо через знания о местоположении спутников и абонентов, либо на основании запросного сигнала от абонента (для этого используют сейчас в НССС Iridium пилот-сигнал) с анализом времени прихода по отдельному частотному каналу (иначе разделения во времени не получить) и подстройкой по частоте Доплера. То есть, всегда стоит вопрос подстройки по частоте и времени (коду). Однако не желательно использовать метод пилот-сигнала, так как при пилот-сигнале когерентная фазовая автоподстройка по частоте заменяется частотной автоподстройкой из-за переноса значения частоты Доплера на другую частоту. То есть требуется перенос значения частоты Доплера на несущую частоту информационного сигнала с ухудшением отношения сигнал/шум из-за отсутствия когерентной обработки непосредственно на сигнале и здесь необходимо использовать многочастотный режим с расходом мощности на пилот-сигнал. Отметим, что в способе быстрой фазовой подстройки [6, 7] можно использовать гибкий подход, и применить для подстройки по частоте и коду некоторое количество повторяющихся кодов навигации или с заранее известной последовательностью.
Определим вначале метод подстройки по частоте при излучении навигационного сигнала от КА на абонента. Как мы указывали выше, в пределах одного луча происходит изменение частоты Доплера от нуля до 25 кГц с учётом использования поправки в КА несущей радиочастоты в зависимости от номера луча. Это может достигаться за счёт смещения несущей частоты на значение поправки по Доплеру за счёт балансного модулятора. При использовании метода быстрой подстройки по частоте по методу [6,7] за 100 мксек, полоса пропускания цифрового фильтра для определения начальной частоты Доплера должна быть порядка 100 кГц, то есть в 4 раза выше и эта величина соответствует необходимой вычисленной полосе в дальней зоне по формуле (6). При этом необходимо обеспечить начальный поиск по частоте Доплера так, чтобы частота Доплера попала в полосу от 20 кГц до 25 кГц, так как в этом случае определение начальной частоты по тактам в пределах 3-4 повторяющихся циклов будет в зоне 100 мксек. То есть, вначале, надо определить начальную частоту Доплера по количеству тактов, умещающихся в полупериоде дискриминационной характеристики как это подробно описано в [6, 7] так чтобы подсчёт тактов не давал ошибку более 1-2,5 кГц. Само такое определение с установкой начала замыкания петли обратной связи в ноль дискриминационной характеристики фазовой автоподстройки частоты (ФАПЧ) позволяет избежать захвата на сопровождение гармоник и выход из сопровождения от шумов. С целью попадания в полосу от 20 кГц до 25 кГц в устройстве абонента, последовательно, через 100 мксек смещается либо частота синтезатора частот, либо изначально формируется в ПЛИС частота Доплера со смещением на 5 кГц с поступлением этого сигнала через ЦАП на балансный модулятор по рисунку 3. Возможно также изменение тактовой частоты подаваемой на АЦП, с учётом того, что АЦП работает как смеситель с переносом частоты. При этом, если сигнал тактовой частоты формируется в ПЛИС, то смещение может осуществляться за счёт переключения кварцевых источников генерации сигналов, поступающих на ПЛИС с их малым разносом по частоте. Возможно обеспечить такое периодическое смещение через каждые 100 мксек по частоте Доплера в излучаемом сигнале от КА в режиме «дозвона». В итоге максимальное время подстройки по частоте Доплера возьмём 1000 мксек с учётом возможного максимального изменения частоты Доплера в луче в дальней зоне на 50 кГц. Понятно, что использование параллельных каналов для подстройки по частоте Доплера сократит время подстройки, но приведёт к росту энергопотребления и масса – габаритных характеристик приёмника мобильного устройства абонента. Определим теперь необходимое время подстройки по коду. С этой целью отмечаем, что в ПЛИС используется разложение выборок с частотой 152 МГц на выборки с тактами по 38 Мбит/сек [6, 7]. Время на подстройку по коду на импульс в 38 Мбит/сек будет определяться длительностью кода (10 мксек, это 380 бит) и параллельной обработкой импульсов при распределении по тактам в 38 Мбит/сек [380 бит/4такта×20 мксек]=1,9 млсек. Если определить сдвиг по тактам не через импульс, а через половину импульса, что улучшает точность подстройки, то будем иметь на подстройку по коду 3,8 млсек и добавим сюда подстройку по частоте Доплера в 1 млсек. В итоге время подстройки по частоте и коду составит 4,8 млсек. Далее в конце сигнала от КА мы можем использовать с учётом подстройки по коду удлинённый навигационный код почти в 100 мксек (3800 бит в коде), что в 10 раз повысит отношение сигнал/шум, а значит и точность определения такта с максимальной выборкой при накоплении для определения относительного времени прихода. Напомним, что в военных целях в GPS используется скорость передачи кода в 10 Мбит/сек с кодом накопления более 10000. Здесь также можно использовать фазовую подстройку уже на основании накопленного кодового сигнала по принципу GPS ещё большей длительности с учётом первоначальной быстрой фазовой автоподстройки и более узких по полосе частот цифровых фильтров как это показано в [6, 7]. В общей сумме получаем 4,9 млсек на приём и обработку сигнала в мобильном устройстве от одного из 3-4-х КА для навигации без учёта в конце информации о КА. Так как у нас осуществляется отдельная подстройка по частоте и коду, то точность определения частоты Доплера может быть доведена за один цикл подстройки до 250 Гц (4 млсек), в то время как для ГЛОНАСС (GPS) она составляет за один цикл накопления кода 1 кГц (1 млсек).
Однако для учёта влияния среды необходимо с КА принимать и навигационный сигнал на другой частоте с разнесением порядка более 200 МГц. Например, для связи [10] используется диапазон 2,35 ГГц-2,55 ГГц, и эти значения соответствуют частоте передатчика системы НССС Globalstar 2,4835 ГГц-2,5 ГГц при сужении полосы пропускания из-за диаграммо-образуюшей схемы. Напомним, что для системы «Цикада» этот разнос частот составляет 250 МГц (несущие 150 МГц и 400 МГц). Поэтому для более точной оценки влияния среды распространяющегося сигнала желательно переходить на диапазон 2,7 ГГц-3 ГГц с увеличением полосы пропускания, либо использовать иные способы по расширению диапазона. Как известно патч-антенна простейшей конструкции узкополосная (<5 %) [11], но специальные технические решения позволяют расширить рабочую полосу частот до 50 % и более или строить многодиапазонные антенны. Ширина полосы пропускания патч-антенны сильно зависит от расстояния между лепестком и металлической поверхностью играющей роль «земли-металлической поверхности». Чем ближе лепесток к «земле», тем меньше энергии излучается и больше запасается в ёмкости и индуктивности и тем выше добротность антенны. Грубо полосу пропускания антенны можно оценить по формуле:
 (7)
(7)
Где d – расстояние от лепестка до земли, W – ширина лепестка (обычно половина длины волны), Z0 – импеданс воздушного промежутка между лепестком и землёй, Rrad – сопротивление излучения антенны, Относительная полоса пропускания антенны линейно зависит от её толщины. Характерное значение импеданса воздушного промежутка 377 Ом, а сопротивление излучения 150 Ом, что позволяет упростить формулу:
 (8)
(8)
Для квадратного лепестка на 3 ГГц, W будет 5 см. Толщина антенны в d=0,5 см (это обычное соотношение, которое берётся между квадратом лепестка и толщиной антенны, что видно по полосе пропускания антенны используемой в [10] {/W=0,2 [ГГц]/(1,2×2,4[ГГц])=0,07}) даст относительную ширину полосы пропускания 12%. Отсюда имеем полосу 360 МГц. Напомним, что для ГЛОНАСС разнос частот между несущими частотами L1 и L2 составляет 356 МГц (для GPS порядка 347 МГц). Таким образом, проблема исключения влияния среды решается даже простым переходом в диапазон 3 ГГц. При такой частоте ещё допустимо планарное (параллельное) размещение плат по полотну антенны, в то время как при больших частотах уже требуется слотовое (перпендикулярное к полотну антенны) размещение плат, что даёт увеличение габаритных характеристик.
Однако одновременное излучение двух частот означает и наличие 2-х параллельных каналов на приём в мобильном устройстве. Также требуется, либо повышение мощности в каждом луче КА из 60 в 2 раза, либо увеличение кода навигации в два раза, возможно и компромиссное решение между мощностью и длительностью кода. Но в варианте навигации по методу ГЛОНАСС GPS), можно начальные значения подстройки по коду и частоте, для каждой из несущих частот смещённых предположительно на 300 МГц, разнести во времени на величину 4,8 млсек, и только после этого выдавать от абонента последовательно (с наличием прерывания приблизительно на величину в 3 такта (152 МГц), что равно разнице прихода в 6 метров при ошибке от влияния среды в 4,5 метра) два кода по определению местоположения в 100 мксек с разнесением частот в 200-300 МГц. Это позволит выбрать среднюю величину по относительному времени прихода сигнала с учётом влияния среды. Итого, общее время 2×4,8 млсек+200 мксек=9,8 млсек. При этом последовательный разнос частот во времени для длинных навигационных кодов в 100 мксек не влияет на местоположение абонента и КА, так как первая космическая скорость составляет 8 км/сек, то за 100 мксек последнего навигационного кода изменение местоположения КА может составить всего 0,8 метра. Это в пределах точности определения местоположения в системах ГЛОНАСС и (GPS). Но и эта величина может быть учтена, так как движение КА имеет постоянную траекторию. Это позволяет вычислить изменение по дальности по формуле:
 (9)
(9)
Здесь dка – значение изменения дальности за время Тка=100 мксек, c – скорость света, Fдоп - частота Доплера, f0 – несущая частота. Соответственно здесь стоит задача определения поправки из-за последовательного излучения на основе длин треугольника, а это возможно при известной дальности от абонента до КА на начальной частоте, что возможно реализовать только при запросно-ответной системе. Кроме того, навигационные кодовые последовательности на разных несущих частотах можно ещё разбить с чередованием по времени по 20-50 мксек с кодами накопления 760-1900 бит. В этом случае неточность определения местоположения из-за последовательного излучения на разных частотах составит всего 0,16-0,4 метра. Далее необходимо определить потребность в навигационном сообщении для абонента. Заметим, что на передачу всего навигационного сообщения по методу ГЛОНАСС (GPS) в 36000 бит требуется 720 секунд (12 минут). Это составляет поток информации всего 50 бит/сек. В рассматриваемом случае обеспечивается поток информации в 100 кбит/сек, что даст передачу навигационной информации за 0,36 сек.
Однако для точного определения местоположения абонента по методу ГЛОНАСС (GPS) требуется одновременно принимать сигналы ещё от двух или трёх других спутников. Отсюда сложность этого метода в том, что необходимо устройству абонента одновременно принимать сигналы на 4 каналах, так как если для разнесённых частот от одного КА есть общий путь прохождения радиосигнала, то для разных КА этот путь прохождения радиосигнала не совпадает, и могут быть наложения сигналов во времени. Это приводит при использовании параллельно четырёх каналов на разных несущих частотах разнесённых, например, на 500 кГц-1 МГц, к росту энергопотребления и габаритных размеров устройства связи, которое в многофункциональном режиме будет использовано для навигации. Как будет показано ниже энергопотребление и габаритные размеры возрастут ещё в 4 раза, если использовать метод повышения точности определения местоположения, что закладывается в новых разработках ГЛОНАСС и GPS. Таким образом, метод навигации ГЛОНАСС и GPS имеет ещё один существенный недостаток, который связан с необходимостью использования параллельных каналов в мобильном устройстве абонента, и который, как это будет показано ниже, может быть решён за счёт запросно-ответной системы с определением дальности.
Поэтому в случае запросно-ответной системы более предпочтителен вариант, когда, наоборот, с мобильного устройства поступает запросный сигнал навигации на одной несущей частоте на 4 спутника в зоне обзора, и здесь нет проблемы наложения сигналов из-за разного расстояния прохождения сигналов. Соответственно возникает вопрос: «Хватит ли чувствительности приёмника КА, чтобы принять сигнал от мобильного устройства?» Так как система НССС предназначена для связи, то эта проблема решается, что реализовано в НССС Iridium. При этом мощность мобильного устройства в системе Iridium составляет 7 Вт. Это конечно меньше, чем мощность в 13 Вт, что может использоваться на больших дальностях в передатчике КА, и это приводит к падению полосы пропускания для информации с 0,1 МГц до 0,05 МГц как в Iridium. Поэтому, на первоначальном этапе, в этом случае имеется увеличение длительности кода до 20 мксек, вместо 10 мксек. Так как максимальная частота для необходимой чувствительности вместо 100 кГц имеет значение 50 кГц, то в этом случае для определения начальной частоты Доплера по тактам необходимо перейти к значениям в два раза ниже, и вместо подстройки в полосе 25-20 кГц использовать подстройку в полосе 12,5 - 10 кГц. Это в 2 раза увеличивает время на поиск для попадания в необходимую полосу частот Доплера. Однако если использовать более точное определение местоположения абонента по обработке в КА (а это кстати хотят добиться в системах ГЛОНААС и GPS), например, в 4 раза, то для этого необходимо использовать параллельные каналы в приёмнике КА, тем более, что необходимость этого связана и с повышением количества обслуживаемых абонентов и для реализации многофункциональных режимов как это будет показано ниже. При этом рост масса-габаритных характеристик КА здесь не значителен по сравнению с самим полотном и есть источник в виде Солнца для пополнения энергетических затрат.
Рассмотрим сам метод повышения точности определения местоположения с учётом того, что повышение точности требуется для многофункционального использования и в качестве дистанционного зондирования Земли (ДЗЗ). Здесь, сигналы аналогичные тем, что используются для ГЛОНАСС и GPS принимаются приёмным устройством КА, и при этом обработка сигнала на основе тактовой частоты дискретизации в 152 МГц позволяет получать точность местоположения с учётом накопления сигнала не менее 1-2 м. Эта величина только за счёт тактовой частоты в 152 МГц без учёта накопленных значений амплитуд по близстоящим 3-4 тактам частоты дискретизации в АЦП и использования сплайнов. Но, можно ещё повысить точность определения до 0,25 м-0.5 м (без учёта влияния среды распространения), если использовать 4 ПЛИС с наличием прямого и инверсного сигнала тактовой частоты, а также с учётом сдвига тактового сигнала дискретизации по фазе как синуса и косинуса. Иными словами аналого-цифровые преобразователи (АЦП) для каждого из 4-х ПЛИС отличаются друг от друга по смещению такта в прямом и инверсном виде и из-за сдвига тактов на 90 градусов. Это эквивалентно применению тактовой частоты дискретизации в АЦП порядка 608 МГц (это соответствует варианту требования наземных средств сличения шкал с погрешностью 3…5 нс), но с той лишь разницей, что мы будем иметь при нашем методе выигрыш по энергопотреблению, связанный с тем, что у нас энергетические потери возрастут в 4 раза, но при использовании одной частоты в 608 МГц, вместо четырёх значений по 152 МГц со сдвигом на 90 градусов, они возрастают в квадрате от частоты, то есть в 16 раз. Кроме того, уже в режиме слежения по частоте Доплера при приёме последнего удлинённого навигационного кода с учётом выборок от всех 4 ПЛИС при их усреднении повышается и точность когерентной подстройки. Понятно, что в нашем случае меньше и шумы квантования в АЦП и это позволяет повысить точность определения амплитуд накопленных сигналов в выборках, что также позволяет повысить точность определения координат с использованием сплайнов. Соответственно, такая общая суммарная тактовая частота в 608 МГц с использованием 4 ПЛИС нужна и в режиме радиовысотомера при дистанционном зондировании Земли при применении ЛЧМ сигнала с полосой модуляции (девиацией) в 300 МГц для точности определения рельефа местности как минимум в 0,5 метра. То есть, наличие параллельных каналов в приёмнике КА определяется как необходимостью обслуживания большого количества пользователей при связи, так и повышением точности при навигации и применением многофункциональных режимов.
Далее отметим, что при обработке навигационного кода от абонента на КА можно также сократить время подстройки по коду в 4 раза, если использовать 4 ПЛИС в которых используется разложение выборок с частотой 152 МГц на выборки с тактами по 38 Мбит/сек. В итоге имеем время подстройки по коду на одной частоте 760 бит/[4 (ПЛИС)×2 (такта)]×20 мксек=1,9 млсек. Понятно, что подстройке по коду должна предшествовать подстройка по частоте, где важно попасть в область начального определения частоты в случае навигационного сигнала с мобильного устройства мощностью в 7 Вт в область частот Доплера лежащих в полосе от 12,5 кГц до 10 кГц. По рисунку 7 в каждом квадранте полотна в случае повышения точности по определению местоположения мы имеем по 4 ПЛИС, которые могут обрабатывать сигналы со сдвигом по частоте на 2,5 кГц и есть ещё 4 ПЛИС в центре полотна, которые можно связать по отдельности с ПЛИС каждого квадранта полотна АФАР. В этом случае общее время на поиск по частоте Доплера в полосе 12,5 кГц займёт 200 мксек, после чего на основании данных от ПЛИС в котором обнаружен сигнал превышающий порог с соответствующими характеристиками по частоте замыкается через цифро-аналоговый преобразователь (ЦАП) данного квадранта петля обратной связи. Если исходить из изменения частоты Доплера в пределах одного луча из 60 в дальней зоне в пределах 50 кГц, то поиск по частоте Доплера составит 800 мксек. С учётом последовательной подстройки по коду по двум несущим частотам, разнесённым не менее, чем на 200 -300 МГц, времени на поиск по частоте Доплера на двух частотах по 800 мксек и времени накопления навигационных кодов по 200 мксек на каждую несущую частоту, мы получим информацию о временной задержке через 2×800 мксек+2×1,9 млсек+2×200 мксек=5,8 млсек. Напомним, что время на обработку навигационного сигнала только от одного КА в устройстве абонента составило 9,6 млсек без учёта необходимости приёма одновременно навигационных сигналов от 4-х КА. Это означает, что вариант использования навигационного сигнала от абонента на КА для НССС более предпочтителен, чем вариант от КА на абонента, что сейчас используется в ГЛОНАСС и GPS. Отметим, что затраченное время в 5,8 млсек относится к варианту использования разностно-дальномерного метода с наличием двух излучаемых несущих частот для исключения влияния среды. Однако далее мы покажем использование суммарно-разностного дальномерного метода с сокращением количества используемых КА и с излучением от абонента одной частоты, что сокращает подстройку до 2,9 млсек.
Многофункциональный режим работы НССС с определением местоположения абонента требуется и для Интернет, режима видеоконференций, а также для разговорного режима при большом количестве абонентов, когда возможно использование узконаправленного луча в 30 дБ всего АФАР. Это означает, что режим в 60 лучей должен использоваться в короткие промежутки времени, в которые и следует на КА формировать навигационный сигнал. Но для того, чтобы использовать навигационные сигналы от абонента на космические аппараты оптимально с учётом выполнения функций связи необходимо вначале сделать привязку во времени начиная со «звонка». То есть, в режиме молчания мобильное устройство абонента должно потреблять как можно меньше энергии, но при этом, чтобы не расходовать энергию зря, необходимо знать (хотя бы приблизительно), когда космические аппараты работают в режиме 60-ти лучей. Это может осуществляться, например, через каждые 1-5 секунд, когда 4 КА, расположенные наиболее близко друг к другу будут каждый на своей несущей частоте (fка1, fка2, fка3, fка4) осуществлять передачу (в Globalstar время на дозвон составляет 10 сек). Причём данные частоты (fка1, fка2, fка3, fка4) в режиме 60-ти лучей повторяются через один КА как по долготе, так и по широте. Как было показано ранее, при коде длительностью в 10 мксек (380 бит) и при поиске по коду со сдвигом на половину импульса нам потребуется (380 бит/2)×20 мксек=3,8 млсек. С учётом подстройки по частоте Доплера при наличии одной несущей и удлинённом навигационном коде в 100 мксек мы имеем сигнал по времени длительностью [1 млсек (поиск по частоте Доплера) +3,8 млсек (поиск по коду) +100 мксек (удлинённый навигационный код)] = 4,9 млсек. При этом остаётся ещё 3,38 млсек на дополнительную информацию, если исходить из общего сообщения от одного КА в 8,28 млсек как в Iridium (такое сравнение мы используем с целью указания, что режим навигации вписывается в общий режим работы по связи в разговорном телефонном стиле {ТЛФ} и можно оценить преимущество по количеству обслуживаемых абонентов в дальнейшем) и решения проблемы по неоднозначности по дальности из-за времени распространения сигнала (8,09 млсек). При этом количество пользователей по связи равно количеству пользователей по навигации автоматически. Будем считать, что 1 бит информации у нас занимает 30 мксек, что повышает отношение сигнал/шум в 3 раза (это 112 бит информации). Соответственно на идентификацию спутника по номеру мы оставляем с запасом 9 бит (возможно 512 спутников). Это больше, чем необходимо для перекрытия по 4-м спутникам. Один бит даёт информацию о направлении движения спутника от северного полюса к южному полюсу, или наоборот. Далее 42 бит уйдет на указание значения счётчика времени во временном интервале от 1 часа до 1 нсек на КА. С учётом обновления эфемерид каждые полчаса этого интервала времени достаточно. Можно также указать местоположение КА в момент излучения запросного сигнала на связь с точностью до 0,1 метра с запасом, и если далее будет известно местоположение абонента, то можно обеспечить синхронизацию часов с выбором времени на излучение и принятие сигнала. Так при длине по экватору Земли 40075,696 км нам потребуется 29 бит, а по долготе при движении по меридиану от северного полюса до южного мы имеем 20 004, 275 км. Соответственно это 28 бит. Итого 57 бит определяет привязку КА по местности в самом худшем случае. Такая привязка по карте в дальнейшем позволит определять местоположение объекта при его движении относительно КА с помощью его собственных акселерометров, компаса или гироскопа, и датчиков скорости по координатам и обеспечивать определение нового местоположения используя данные от одного КА. Излучение запросных сигналов от космических аппаратов в режиме 60 лучей мы осуществляем одновременно, но с повторением 4 раза как в кадре системы Iridium по рисунку 8, то есть КА излучает запросный сигнал на своей частоте 4×8,28 млсек=33,12 млсек. Поэтому два бита мы используем под информацию о номере запросного сигнала при его 4-х кратном повторении. То есть мы использовали 111 бит информации из 112 бит. При таком запросном режиме от КА нам достаточно обеспечить захват сигнала даже от одного КА. Понятно, что привязка к величине 8,28 млсек в режиме «дозвона» не обязательна и мы можем также увеличить длительность сигнала от КА который формируется через каждые 1-5 секунды, если потребуется ещё поднять чувствительность запросного сигнала, так как сам кадр имеет длительность 90 млсек, и отсюда на режим передачи от КА можно использовать 45 млсек. Далее, после приёма и определения сигнала хотя бы от одного КА от времени начала сообщения через интервал в 4×8,28 млсек мы можем формировать запросно-ответный сигнал навигации уже от абонента на КА, в течении также 8,28 млсек. Иными словами, сигнал от абонента является навигационным по разностно-дальномерному методу с учётом его передачи на 4 КА, где в одном из КА будет осуществляться местоположение абонента. При этом сам навигационный сигнал для определения задержек с использованием двух частот, разнесённых на 200 -300 МГц для выявления ошибки от среды распространения, как это было показано ранее, составит по длительности 5,8 млсек. При этом не будет никаких мешающих воздействий от окружающей среды, так как захват будет осуществляться по информации по первому такту дискретизации с максимальной амплитудой. Если исходить из использования режима излучения для абонента как в системе Iridium, то у нас остаётся 2,48 млсек для информации от абонента. При использовании суммарно-разностного дальномерного метода, который будет показан ниже и с излучением от абонента одной частоты нам потребуется 2,9 млсек и для информации от абонента остаётся 5,38 млсек.
Для выявления необходимой информации от абонента, рассмотрим алгоритм определения задержек, и какая информация будет обратно поступать на абонента. Ранее мы отмечали, что время излучения на абонента при режиме в 60 лучей по всем КА имеет общую временную синхронизацию, и при этом передаётся информация о времени излучения в виде 42 бит. Оно потом используется для синхронизации по времени КА и абонента, исходя из известной дальности. Мобильное устройство абонента имеет режим первоначального поиска для вхождения в связь с одним КА из четырёх предполагаемых КА по значениям их частот (fка1, fка2, fка3, fка4). Мы знаем номер КА с каким была осуществлена связь (9 бит) и направление движения с севера на юг или обратно (1 бит), а также нам известен номер повторяющегося излучения от КА кратного четырём (2 бит) при цикле 8,28 млсек, так как мы фиксируем время захвата на сопровождение по превышению сигнала над пороговым значением по удлинённому коду навигации. Эта информация передаётся от абонента к КА после циклов подстройки по частоте и коду. Отсюда мы можем вычислить в относительных временных единицах время, потраченное на обработку сигнала от КА в устройстве абонента. Так как нас интересует относительное время, а оно не превышает 8,28 млсек, а частота такта составляет 152 МГц (6,578947 нсек), то при грубом определении мы получаем величину в 1258560, что аналогично 21 биту информации. Далее 1 бит информации, мы потратим на определение того, подвижен абонент (например, это может быть летательный аппарат и тогда необходимо 4 КА для определения местоположения при разностно-дальномерном методе или знать высоту полёта относительно Земли) или находится в статичном состоянии. При этом отметим, что за 8,28 млсек пока идёт обработка сигнала в мобильном устройстве абонента при скорости 180 км/час объект переместиться на расстояние в 0,414 метра, что меньше, чем ошибка за счёт частоты такта в 152 МГц, которая составляет метр. Далее, мы должны указать в сообщении, какой режим работы нужен абоненту, это может быть чисто навигационный режим, смс-сообщение, телефонные переговоры, видеоконференция или Интернет, срочность заказа. На это уйдёт 4 бита. Один бит используется для указания отсутствия или наличия своей навигационной системы. Итого необходимо иметь 39 бит информации для передачи от абонента на КА. Будем считать, что у нас один бит информации составляет 60 мксек, так как у нас чувствительность ниже в 2 раза на линии от абонента к КА. В этом случае мы имеем (2,48 млсек/69 мксек)=41 бит на информацию. Таким образом, у нас остаётся ещё 2 бита на случай выбора метода навигации. И ещё раз отметим, что информационный код может быть расширен, так как в кадре 90 млсек, и мы имеем 45 млсек на режим от абонента к КА, что составляет добавочно 11,88 млсек.
Далее мы используем тот же принцип, что применяется в системе ГЛОНАСС, но с передачей навигационного сигнала от абонента на 4 КА. То есть, навигационный сигнал от абонента длительностью в 8,28 млеск с указанием номера КА с кем была осуществлена связь принимается близлежащими КА, где формируется относительное время задержки исходя из времени превышения уровня сигнала над пороговым уровнем по удлинённому коду и времени синхронного начального излучения от КА. Эти относительные времена от КА с другими номерами, помимо того, который был указан в сообщении от абонента, передаются на КА номер которого был указан от абонента. В этом КА мы получаем задержки по формулам: Тзад1=Тка1-аб +Тобр +Таб-ка1; Тзад2=Тка1-аб +Тобр +Таб-ка2; Тзад3=Тка1-аб +Тобр +Таб-ка3; Тзад4=Тка1-аб +Тобр +Таб-ка4. Напомним сам принцип использования разностно-дальномерного метода рисунок 9.

Рис. 9. Разностно-дальномерный метод
Этот метод измерения по задержкам, который является разностно-дальномерным методом, описан в [12]. Здесь измерение дальности осуществляется по формуле:
 (10)
(10)
Где: 2Со = расстояние между двумя КА в метрах,  – разность дальности до абонента (точка Ц) между пунктами, расположенными в точке А (первый КА) и В (второй КА), учитывающего при расчёте значение базы С0 между пунктами и время задержки
– разность дальности до абонента (точка Ц) между пунктами, расположенными в точке А (первый КА) и В (второй КА), учитывающего при расчёте значение базы С0 между пунктами и время задержки  .
.  – разность дальности до абонента (точка Ц) между пунктами, расположенными в точках А и В, учитывающего при расчёте значение базы С0 между пунктами и время задержки
– разность дальности до абонента (точка Ц) между пунктами, расположенными в точках А и В, учитывающего при расчёте значение базы С0 между пунктами и время задержки  . Однако в методе навигации по ГЛОНАСС (GPS) нам неизвестны значения
. Однако в методе навигации по ГЛОНАСС (GPS) нам неизвестны значения  и
и  , а известно значение разности
, а известно значение разности  .
.
Понятно, что в частном случае равнобедренного треугольника мы имеем  . Тогда, при неизвестных значениях Da и Db мы должны рассматривать плоскость значений дальности, для которых выполняется условие
. Тогда, при неизвестных значениях Da и Db мы должны рассматривать плоскость значений дальности, для которых выполняется условие  . Если есть ещё одна некоторая точка С (третий КА) у которого, например, с точкой А (первый КА) или точкой В (второй КА) также выполняется условие равнобедренного треугольника, то мы будем иметь линию (пересечение плоскостей от значений дальности, в которых выполняются условие равенства задержек), которая будет иметь единственное пересечение с поверхностью Земли (при нахождении абонента на летательном аппарате (ЛА) это может быть поверхность высоты ЛА вместо рельефа местности), что и будет определять местоположение объекта. Использование четвёртого КА позволит определить местоположение абонента в виде точки, и без необходимости знать рельеф местности. В случае не нулевых разностей задержек
. Если есть ещё одна некоторая точка С (третий КА) у которого, например, с точкой А (первый КА) или точкой В (второй КА) также выполняется условие равнобедренного треугольника, то мы будем иметь линию (пересечение плоскостей от значений дальности, в которых выполняются условие равенства задержек), которая будет иметь единственное пересечение с поверхностью Земли (при нахождении абонента на летательном аппарате (ЛА) это может быть поверхность высоты ЛА вместо рельефа местности), что и будет определять местоположение объекта. Использование четвёртого КА позволит определить местоположение абонента в виде точки, и без необходимости знать рельеф местности. В случае не нулевых разностей задержек  , мы также будем иметь единственное место пересечения при трёх КА с поверхностью Земли, а учёт задержки от четвёртого КА также обеспечит наличие одной общей точки местоположения абонента, и которая может находиться даже не на поверхности Земли, например, на некотором летательном аппарате (ЛА). Таким образом, зная задержки: Тз12=Таб-ка1-Таб-ка2; Тз23=Таб-ка2 -Таб-ка3; Тзад34=Таб-ка3-Таб-ка4; и другие их комбинации между КА, а также расстояния между КА и их местоположение относительно Земли можно определить местоположение абонента, используя на основе удовлетворения уравнений по определению дальности при котором выполняются указанные задержки по времени прихода навигационного сигнала на КА от абонента по нашей версии использования метода ГЛОНАСС (GPS). Далее, полученное значение по координатам абонента, а также координаты наиболее близко расположенного КА, а также скорректированное время для синхронизации счётчиков времени с учётом местоположения и временные параметры на режимы приёма и передачи, в качестве информационного сообщения, передаются на приёмное устройство абонента от того КА с кем была уже налажена связь. Скорректированное время для синхронизации часов КА и абонента передаётся с учётом дальности, то есть времени прохождения от КА до абонента с осуществлением поправки от времени конца удлинённого навигационного кода от абонента до КА, по сигналу которого первоначально была осуществлена в устройстве абонента подстройка по частоте и коду. По навигационному сообщению от абонента на КА с учётом двухчастотного режима, общего тактирования сигнала на выборки в 608 МГц (это даёт точность по дальности ±0,25 метра и выше с учётом сплайнов по амплитуде накопленного кода по тактовым выборкам) с применением двухчастотного последовательного режима с коррекцией расстояния по формуле (9) и дальнейшего уточнения дальности во времени, мы можем получить синхронизацию счётчиков КА и абонента вплоть до такта с частотой 152 МГц, что составляет точность определения по дальности метр и выше с учётом сплайнов по амплитуде накопленного кода по тактовым выборкам. При этом синхронизация часов позволяет в дальнейшем использовать для определения местоположения уже один КА, вместо трёх или четырёх КА как в системе ГЛОНАСС. Понятно, что нам не нужно передавать на абонента эфемериды, если мы уже можем сразу передать местоположение абонента, и при этом уже можно использовать однолучевой режим с коэффициентом усиления антенны в 30 дБ, так как местоположение известно, и можно подобрать режим излучения несущей КА такой, чтобы сразу обеспечить режим подстройки по частоте Доплера. Это в 4 раза улучшает отношение сигнал/шум по сравнению с режимом 60-ти лучей. Понятно, что местоположение абонента также передаётся по межспутниковой связи на все те КА которые прислали сообщение и это позволяет использовать для навигации и связи однолучевой режим для каждого из пятнадцати полотен АФАР КА, так как уже есть синхронизация часов КА и абонента и можно выбрать время когда лучи в 30 дБ всех четырёх КА будут одновременно направлены на абонента. После определения местоположения абонента, как показано в быстром способе подстройки по частоте Доплера [6, 7], мы можем улучшить отношение сигнал/шум (с учётом использования направленной антенны абонента, например, из двух патч {5 дБ вместо -3 дБ} на ближайший КА) по сравнению с Iridium в 20 раз в режиме связи с абонентами, или снизить мощность излучения от устройства абонента. Это очень важно при использовании аккумуляторов как источников питания. Желательно также и некоторое компромиссное решение. Таким образом, режим запросно-ответной системы для НССС по сравнению с такими системами как ГЛОНАСС и GPS позволяет:
, мы также будем иметь единственное место пересечения при трёх КА с поверхностью Земли, а учёт задержки от четвёртого КА также обеспечит наличие одной общей точки местоположения абонента, и которая может находиться даже не на поверхности Земли, например, на некотором летательном аппарате (ЛА). Таким образом, зная задержки: Тз12=Таб-ка1-Таб-ка2; Тз23=Таб-ка2 -Таб-ка3; Тзад34=Таб-ка3-Таб-ка4; и другие их комбинации между КА, а также расстояния между КА и их местоположение относительно Земли можно определить местоположение абонента, используя на основе удовлетворения уравнений по определению дальности при котором выполняются указанные задержки по времени прихода навигационного сигнала на КА от абонента по нашей версии использования метода ГЛОНАСС (GPS). Далее, полученное значение по координатам абонента, а также координаты наиболее близко расположенного КА, а также скорректированное время для синхронизации счётчиков времени с учётом местоположения и временные параметры на режимы приёма и передачи, в качестве информационного сообщения, передаются на приёмное устройство абонента от того КА с кем была уже налажена связь. Скорректированное время для синхронизации часов КА и абонента передаётся с учётом дальности, то есть времени прохождения от КА до абонента с осуществлением поправки от времени конца удлинённого навигационного кода от абонента до КА, по сигналу которого первоначально была осуществлена в устройстве абонента подстройка по частоте и коду. По навигационному сообщению от абонента на КА с учётом двухчастотного режима, общего тактирования сигнала на выборки в 608 МГц (это даёт точность по дальности ±0,25 метра и выше с учётом сплайнов по амплитуде накопленного кода по тактовым выборкам) с применением двухчастотного последовательного режима с коррекцией расстояния по формуле (9) и дальнейшего уточнения дальности во времени, мы можем получить синхронизацию счётчиков КА и абонента вплоть до такта с частотой 152 МГц, что составляет точность определения по дальности метр и выше с учётом сплайнов по амплитуде накопленного кода по тактовым выборкам. При этом синхронизация часов позволяет в дальнейшем использовать для определения местоположения уже один КА, вместо трёх или четырёх КА как в системе ГЛОНАСС. Понятно, что нам не нужно передавать на абонента эфемериды, если мы уже можем сразу передать местоположение абонента, и при этом уже можно использовать однолучевой режим с коэффициентом усиления антенны в 30 дБ, так как местоположение известно, и можно подобрать режим излучения несущей КА такой, чтобы сразу обеспечить режим подстройки по частоте Доплера. Это в 4 раза улучшает отношение сигнал/шум по сравнению с режимом 60-ти лучей. Понятно, что местоположение абонента также передаётся по межспутниковой связи на все те КА которые прислали сообщение и это позволяет использовать для навигации и связи однолучевой режим для каждого из пятнадцати полотен АФАР КА, так как уже есть синхронизация часов КА и абонента и можно выбрать время когда лучи в 30 дБ всех четырёх КА будут одновременно направлены на абонента. После определения местоположения абонента, как показано в быстром способе подстройки по частоте Доплера [6, 7], мы можем улучшить отношение сигнал/шум (с учётом использования направленной антенны абонента, например, из двух патч {5 дБ вместо -3 дБ} на ближайший КА) по сравнению с Iridium в 20 раз в режиме связи с абонентами, или снизить мощность излучения от устройства абонента. Это очень важно при использовании аккумуляторов как источников питания. Желательно также и некоторое компромиссное решение. Таким образом, режим запросно-ответной системы для НССС по сравнению с такими системами как ГЛОНАСС и GPS позволяет:
- Сократить длину используемого навигационного кода с 1 млсек как в ГЛОНАСС до 1-10 мксек, что позволяет сочетать режимы связи с навигационным режимом (напомним, кодовый сигнал в 128 бит, который также может быть навигационным, уже используется для передачи сообщений в НССС Globalstar).
- Поднять точность определения местоположения абонента за счёт передачи навигационного сигнала, наоборот, от абонента на КА, так как на борту КА возможно использование эквивалента по тактам в 608 МГц вместо 152 МГц как в устройстве абонента. Это позволяет повысить точность определения местоположения в 4 раза с ±1 метра до ±0,25 метра, при условии точного определения координат КА и временной синхронизации счётчиков на КА, и это без учёта сплайнов при накоплении сигнала навигации по амплитуде.
- Обеспечить синхронизацию часов абонента с часами КА вплоть до такта в устройстве абонента (если использовать синхронизацию по значению амплитуд в сплайне между тактами, то ещё выше), что позволяет определять дальность от КА до абонента без использования данных от других КА и определять местоположение объекта по одному КА за счёт измерения дальности из разных точек по местоположению КА с исключением вариантов не лежащих на поверхности Земли при минимизации ошибки в точки пересечения дальностей от разных точек измерения.
Следовательно, уже на этапе перехода от геостационарных систем навигации по методу ГЛОНАСС (GPS) к низкоорбитальным системам есть неоспоримые преимущества, однако наблюдение одновременно 4-х КА обычно может происходить только в районе полюсов, поэтому желательно рассмотреть вопрос: «А можно ли сократить количество КА при использовании запросно-ответной системы навигации, например, до трёх КА и менее, вместо четырёх?».
Действительно, для однозначного построения пирамиды в пространстве достаточно знать три точки её основания по координатам от трёх КА и дальность до точек основания (КА) при разностно-дальномерном методе, и ясно, что роль трёх КА можно заменить одним КА, имеющим движение, если использовать запросно-ответную систему от трёх пунктов в движении.
Предположим, что рассматривается вариант определения местоположения абонента на плоскости (так как через любые три точки можно провести плоскость в пространстве), и ищется точка пересечения на основе известных сумм и разностей по дальности. Значение местоположения 3-х точек на плоскости (рисунок 10) определяется координатами X1, Y1, X2,Y2, Xо,Yо.
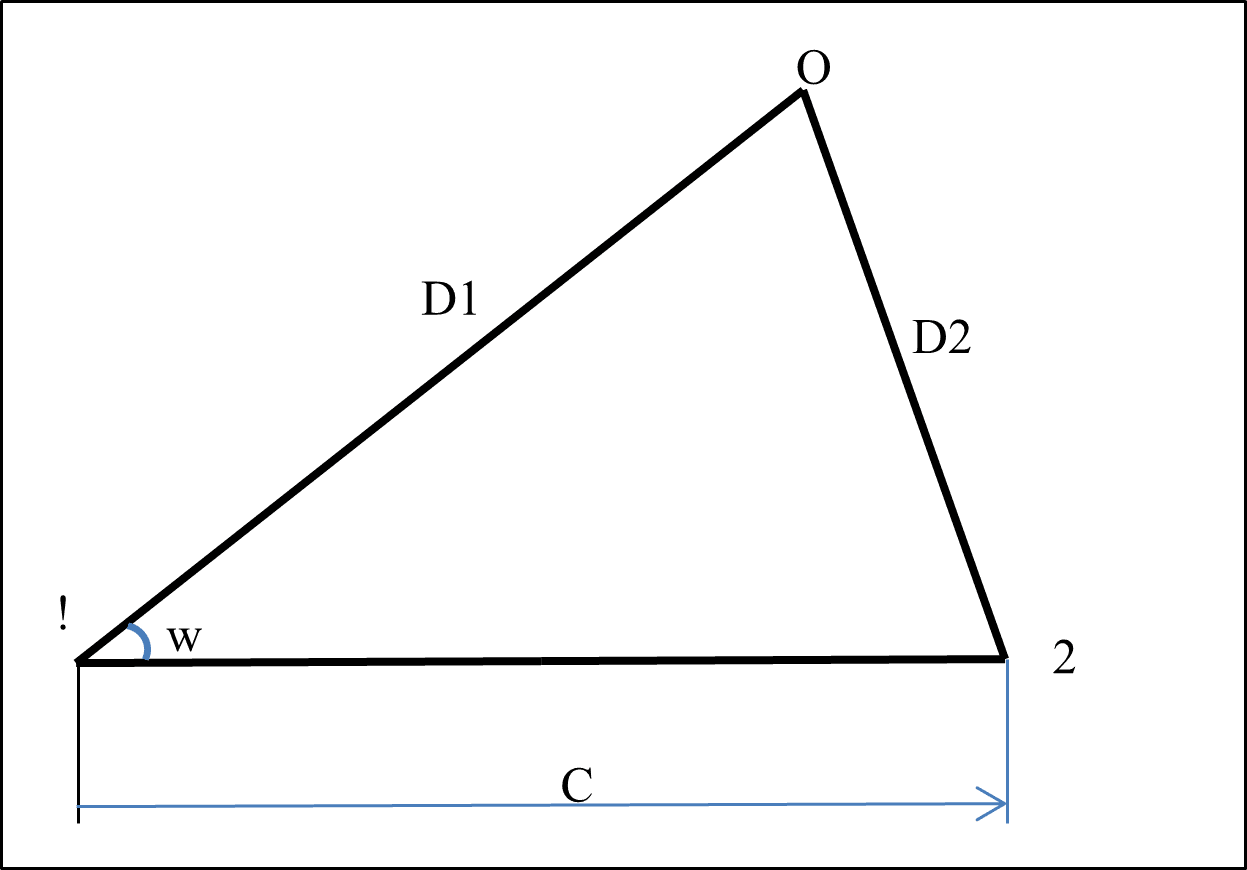
Рис. 10. Расположение двух КА и абонента в одной плоскости
При этом известны координаты и расстояние между точками 1 и 2, но неизвестны координаты точки О. Однако известна величина суммы расстояний от точки 1 до точки О и от точки 2 до точки О: D=D1+D2=const. Данная постоянная величина образует некоторую поверхность в пространстве. Известна также разность расстояний от точки 1 до точки О и от точки 2 до точки О: d=D1-D2 = const. Эта постоянная величина разности расстояний до точки О также формирует некоторую поверхность точек в пространстве. То есть, по отдельности использования эти два метода определения дальности требуют такое же количество КА, но у разностного метода преимущество в том, что для него не требуется наличия запросно-ответной системы с минимальной аппаратной задержкой для переизлучения, а недостаток касается того, что нельзя определить дальность (хотя бы приближённо) используя один КА, в то время как суммарный метод такую приближённую дальность позволяет определить. Поэтому мы считаем более перспективным использование сочетания этих двух способов, так как законы изменения суммы и разности разные, и это, несомненно, даёт пересечение поверхностей в объеме в виде линии. В этом случае мы имеем простейшую задачу на решение системы из двух уравнений с двумя неизвестными, которая имеет однозначное решение. Отсюда, можем записать D2=D1±d (выбор знака d зависит от разности), D=2D1±d. Далее можно вычислить значение Da=D1=(D∓d)/2, Db=D2=D-D1. Однако это решение касается значений на некоторой оси координат, на плоскости будет множество решений. Поэтому при решении на плоскости необходимо иметь ещё две точки расположенные на этой плоскости (X1,Y1; X2,Y2), которые будут определять два симметричных решения, и эта неоднозначность устраняется за счёт известных углов от КА. Собственно, подставляя значения Da=D1, Db=D2 в формулу (10) мы получаем треугольник со всеми известными сторонами. Иными словами, все стороны треугольника на плоскости при известных значениях двух точек (с вычислением базы С), суммы от двух сторон и разности этих сторон дают однозначное местоположение.
Однако в пространстве, мы имеем равнозначное местоположение точки О в перпендикулярной плоскости, что эквивалентно окружности по возможному местоположению абонента. Понятно, что эта проблема может быть решена с помощью третьего КА, что даст точку пересечения двух окружностей, если рассматривать вариант размещения абонента (точки О) на поверхности Земли или когда известна высота полёта абонента над Землёй, что также обеспечит точку пересечения. Таким образом, запросно-ответная система позволяет определять суммарно-разностным дальномерным методом местоположение абонента, если он виден одновременно двум или трём КА, а не четырём КА как в разностно-дальномерном методе в системах ГЛОНАССС (GPS).
Отметим, что здесь рассматривается возможность использования самого суммарно-разностного дальномерного метода в идеальном случае без задержек на обработку сигнала и аппаратной задержки, и в предположении неподвижных КА за время определения общей дальности, чего не бывает на низких орбитах из-за движения КА со скоростью 8 км/сек. Так за 17 млсек (прохождение сигнала от КА и обратно) КА изменит своё местоположение на 136 метров. Поэтому рассмотрим вариант использования двух КА в движении при запросно-ответной системе как эквивалент применения 4-х КА по системе ГЛОНАСС (GPS), так как за время запроса и ответа с задержкой внутри устройства абонента КА уже переместится в новую точку местоположения и отсюда мы имеем 4 точки. То есть, преимущество запросно-ответной системы для НССС состоит в том, что возможно оценить общую дальность от КА к абоненту и обратно, с учётом задержки в устройстве приёмника абонента, а перемещение КА за это время запроса и ответа даст ещё две дополнительные точки местоположения. Если абонент неподвижен на Земле или имеет малую скорость движения, то мы имеем перемещение КА с учётом вращения Земли по рисунку 11 с учётом 4-х точек местоположения двух КА.
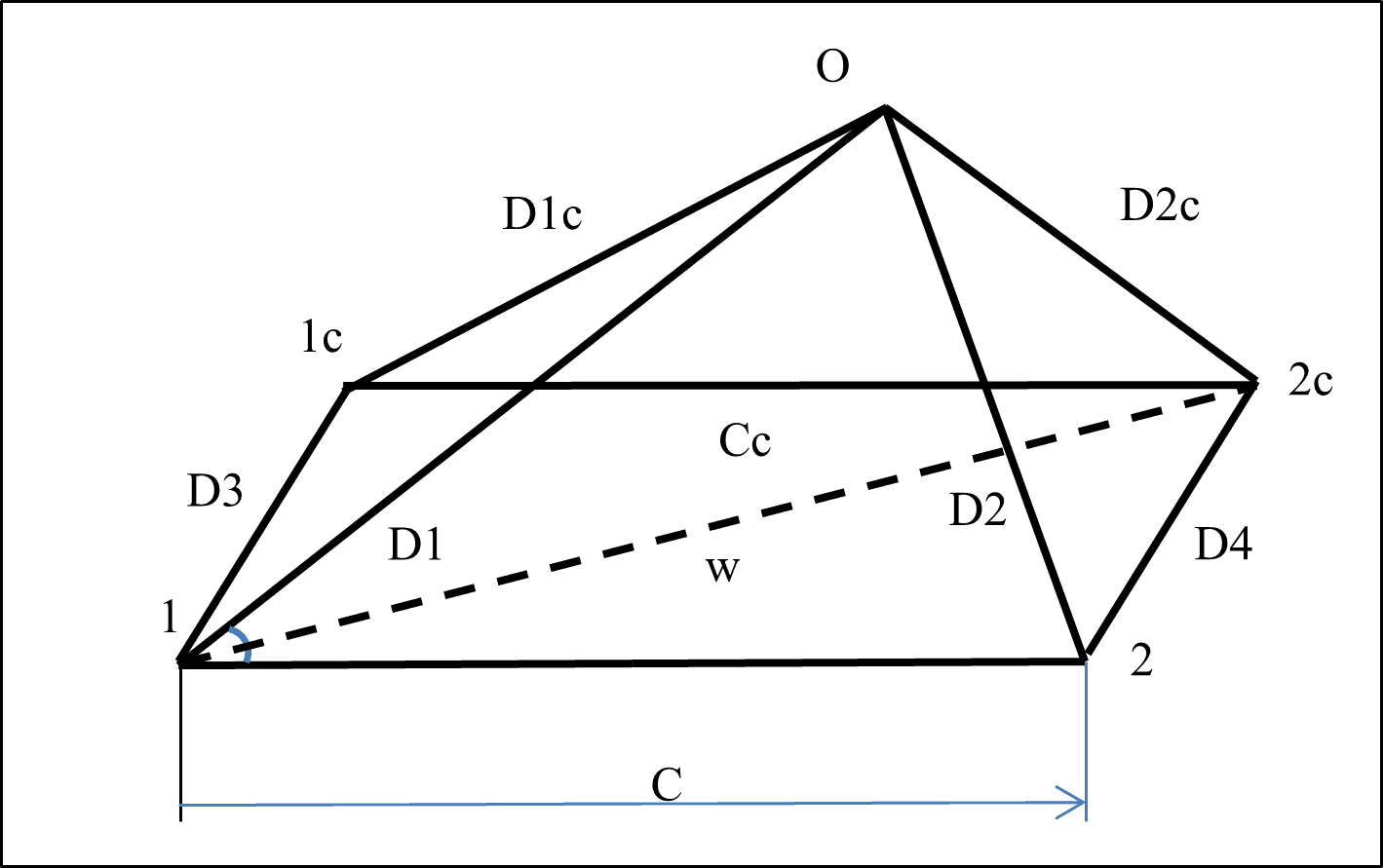
Рис. 11. Расположение двух движущихся КА и абонента с учётом перемещения при запросно-ответной системе навигации от точки 1 до точки 1с и от точки 2 до точки 2с
Решение задачи имело бы простейший характер, если бы между абонентом и КА была бы временная синхронизация, но в начальный момент определения местоположения абонента её нет. В этом случае при двух КА работающих по запросно-ответной схеме при суммарно-разностном дальномерном методе можно определить 2 значения расстояния от КА до абонента и обратно (D1ka=D1+D1c, D2ka=D2+D2c). Кроме того, можно вычислить разность расстояний от абонента до двух КА по нисходящей линии в момент прихода излучений от двух КА  , где разность вычисляется в устройстве абонента по разности времени прихода сигналов от двух КА с учётом последовательного их разнесения во времени и исключения этой последовательной задержки за счёт наличия синхронизации часов от двух КА. Соответственно определяется и разность расстояний от абонента до КА по восходящей линии в момент прихода излучения от абонента на КА
, где разность вычисляется в устройстве абонента по разности времени прихода сигналов от двух КА с учётом последовательного их разнесения во времени и исключения этой последовательной задержки за счёт наличия синхронизации часов от двух КА. Соответственно определяется и разность расстояний от абонента до КА по восходящей линии в момент прихода излучения от абонента на КА  . Так как мы имеем временную синхронизацию между КА, то при неподвижном абоненте даже в случае последовательного приёма абонентом сигналов от каждого из КА, мы можем учесть эту временную разницу в относительных единицах времени, и также вычислить разность прихода сигналов от КА с учётом местоположения КА за время последовательной обработки. Понятно, что время на обработку сигналов внутри устройства абонента также может быть учтено в относительных временных единицах и передано на КА для вычисления местоположения. Так как мы не имеем синхронизацию часов абонента и КА, то мы не можем вычислить разность между временем распространения излучения сигнала КА на абонента и временем распространения излучаемого сигнала от абонента до КА в новой точке приёма. Поэтому вместо двух разностных значений мы имеем два суммарных значения по распространению сигнала от КА и обратно, которые мы можем вычислить. В этом случае две поверхности разностных значений от ±d и ±dс, дают в пространстве линию, одновременно и две поверхности от суммарных значений D1ka, D2ka также образуют линию. Точка пересечения этих линий даст местоположение абонента. Аналогичный результат мы получим, если вычислим значение D1c через значение D1 в виде D1c=D1ka-D1. Далее представим значение D2c через D1: D2с=D1ka-D1±dc. Соответственно D2=D2ka-D2c=D2ka-(D1ka-D1±dc); D1=D1ka-D2ka+D2∓dc; D1=D2∓d; D-D2=D2∓d, D2=(D±d)/2, D1=D1ka-D2ka+(D±d)/2∓dc. Величина D=D1+D2 нам неизвестна, но является некоторой константой, и отсюда изменение D1 может касаться только изменения величин X1, Y1, Z1 относительно друг друга при неизменном значении D1. Таким образом, мы имеем шарообразную поверхность. Аналогичные шарообразные поверхности будут давать и значения D2, D1c и D2c. Точка пересечения от этих всех шарообразных поверхностей определит местоположение абонента. В этом случае мы имеем равенства X1=XD2±X2, Y1=YD2±Y2, Z1=ZD2±Z2, X1=XD1c±X1c, Y1=YD1c±Y1c, Z1=ZD1c±Z1c, X1=XD2c±X2c, Y1=YD2c±Y2c, Z1=ZD2c±Z2c. Соответственно: D1=(X12+Y12+Z12)1/2, D2=[(X1±X2)2+(Y1±Y2)2+(Z1±Z2)2]1/2, D1c=[(X1±X1c)2+(Y1±Y1c)2+(Z1±Z1c)2]1/2, D2c=[(X1±X2c)2+(Y1±Y2c)2+(Z1±Z2c)2]1/2. Таким образом, мы имеем три неизвестных величины X1,Y1,Z1, но при этом с учётом времени обработки сигнала tобр и аппаратной задержки tап имеем D1ka*-c×(tобр+tап)=D1+D1с, D2ka*-c×(tобр+tап)=D2+D2с, D2-D1=±d, D2c-D1c=±dc.
. Так как мы имеем временную синхронизацию между КА, то при неподвижном абоненте даже в случае последовательного приёма абонентом сигналов от каждого из КА, мы можем учесть эту временную разницу в относительных единицах времени, и также вычислить разность прихода сигналов от КА с учётом местоположения КА за время последовательной обработки. Понятно, что время на обработку сигналов внутри устройства абонента также может быть учтено в относительных временных единицах и передано на КА для вычисления местоположения. Так как мы не имеем синхронизацию часов абонента и КА, то мы не можем вычислить разность между временем распространения излучения сигнала КА на абонента и временем распространения излучаемого сигнала от абонента до КА в новой точке приёма. Поэтому вместо двух разностных значений мы имеем два суммарных значения по распространению сигнала от КА и обратно, которые мы можем вычислить. В этом случае две поверхности разностных значений от ±d и ±dс, дают в пространстве линию, одновременно и две поверхности от суммарных значений D1ka, D2ka также образуют линию. Точка пересечения этих линий даст местоположение абонента. Аналогичный результат мы получим, если вычислим значение D1c через значение D1 в виде D1c=D1ka-D1. Далее представим значение D2c через D1: D2с=D1ka-D1±dc. Соответственно D2=D2ka-D2c=D2ka-(D1ka-D1±dc); D1=D1ka-D2ka+D2∓dc; D1=D2∓d; D-D2=D2∓d, D2=(D±d)/2, D1=D1ka-D2ka+(D±d)/2∓dc. Величина D=D1+D2 нам неизвестна, но является некоторой константой, и отсюда изменение D1 может касаться только изменения величин X1, Y1, Z1 относительно друг друга при неизменном значении D1. Таким образом, мы имеем шарообразную поверхность. Аналогичные шарообразные поверхности будут давать и значения D2, D1c и D2c. Точка пересечения от этих всех шарообразных поверхностей определит местоположение абонента. В этом случае мы имеем равенства X1=XD2±X2, Y1=YD2±Y2, Z1=ZD2±Z2, X1=XD1c±X1c, Y1=YD1c±Y1c, Z1=ZD1c±Z1c, X1=XD2c±X2c, Y1=YD2c±Y2c, Z1=ZD2c±Z2c. Соответственно: D1=(X12+Y12+Z12)1/2, D2=[(X1±X2)2+(Y1±Y2)2+(Z1±Z2)2]1/2, D1c=[(X1±X1c)2+(Y1±Y1c)2+(Z1±Z1c)2]1/2, D2c=[(X1±X2c)2+(Y1±Y2c)2+(Z1±Z2c)2]1/2. Таким образом, мы имеем три неизвестных величины X1,Y1,Z1, но при этом с учётом времени обработки сигнала tобр и аппаратной задержки tап имеем D1ka*-c×(tобр+tап)=D1+D1с, D2ka*-c×(tобр+tап)=D2+D2с, D2-D1=±d, D2c-D1c=±dc.




Это система имеет решение даже при наличии трёх уравнений из четырёх, в силу того, что переменные на основе уравнений взаимосвязаны друг с другом и здесь неоднозначность от знака (±) решается на основе расположения лучей АФАР КА. Однако, в силу сложности разделения переменных, решение лучше искать методом последовательных приближений. При этом для исключения влияния среды на распространение сигнала можно излучение от КА на абонента проводить на несущих частотах, например, в области нижних частот диапазона антенны, а излучение от абонента на КА осуществлять в области диапазона верхних частот антенны с разносом на 250-350 МГц. В этом случае комбинации уравнений по три, в одном случае с использованием разности d, а в другом случае разности dc позволят учесть влияние среды. Иными словами, запросно-ответная система с использованием суммарно-разностного дальномерного метода позволяет заменить параллельное излучение двух частот для исключения влияния среды на последовательное, в силу того, что местоположение абонента в одной точке как бы определяется два раза. На основе разностного сигнала от КА к абоненту и разностного сигнала от абонента к КА. При этом суммарные сигналы при использовании несущих частот на краях диапазона антенны сразу дают усреднённые значения.
Таким образом, в случае использования КА НССС в качестве навигационной системы, и отсутствии синхронизации часов абонента и КА, мы можем сократить количество используемых КА при применении суммарно-разностного дальномерного метода в 2 раза по сравнению с разностно-дальномерным методом. При этом появляется возможность учесть влияние среды не за счёт параллельного излучения несущих частот по краям диапазона антенны, а при последовательном излучении от КА до абонента на одной частоте, а от абонента до КА на другой частоте. Как и в разностно-дальномерном методе время обработки сигнала в устройстве абонента, при использовании суммарно-разностного дальномерного метода, также незначительно будет влиять на точность определения местоположения объекта, так как при скорости движения абонента в ЛА в 2500 км/час и обработке сигнала в течение 1 млсек местоположение меняется всего на 0,69 метра. Казалось бы, что суммарно-разностный метод подразумевает измерение сумм от КА до абонента и обратно, и при движении абонента в ЛА в 2500 км/час и времени распространении сигнала от КА до абонента и обратно 2×8,28 млсек=16,56 млсек (2×2484 км), мы будем иметь изменение местоположения абонента в 11,5 метра, что может восприниматься как ошибка. Но фиксируется местоположение по дальности в момент прихода сигнала (с учётом его общей длительности по времени, которая известна) на абонента и местоположение в момент излучения сигнала через время обработки в устройстве абонента (например, через 1 млсек). При этом местоположение абонента определяется не в момент прихода суммарного сигнала на КА, а фактически в момент излучения абонентом ответного сигнала. Отсюда делая периодические замеры, и зная разницу в местоположении абонента между замерами, мы можем также вычислить скорость и перемещение в пространстве ЛА. Следует отметить, что и эта величина ошибки из-за времени обработки в устройстве абонента может быть существенно снижена, если учесть тот факт, что ЛА при скорости в 2500 км/час имеют свою навигационную систему по измерению относительного движения в пространстве, что может быть также учтено и эти данные могут быть переданы на КА. Кроме того, относительная дальность изменения положения за время обработки между абонентом и КА на основании частоты Доплера может быть учтена по формуле (9). С учётом того, что в импульсе в 38 Мбит/сек мы имеем 4 такта в 152 МГц и расстояние между тактами равняется практически 2 метрам, то вхождение в режим синхронизации с выявлением максимальной амплитуды такта при накоплении навигационного кода уже будет достигнуто при ошибке определения местоположения в 8 метров, что меньше чем ошибка из-за влияния среды в 4,5 метра и движения ЛА. Соответственно постоянная погрешность по выборкам позволяет определить и скорость движения абонента.
Чтобы сократить время обработки в устройстве абонента, которое также влияет на точность определения местоположения движущегося абонента, желательно сократить как длительность самого запросного навигационного кода от КА к абоненту, так и время, затрачиваемое на формирование ответного навигационного кода от абонента к КА. Так, при длительности обработки навигационного кода в течение 8,28 млсек внутри ПЛИС с учётом первоначальной подстройки по частоте Доплера и навигационному коду, как это было показано выше при использовании 4-х КА в режиме ГЛОНАСС, при скорости движения абонента в ЛА в 2500 км/час, мы будем иметь неточность в местоположении в 5,75 метра, и это добавит ошибку вычисления дальности и местоположения, если не делать дополнительные замеры по определению скорости ЛА или не иметь дополнительных данных о движении ЛА в пространстве на основе его внутренней навигационной системы по относительному изменению местоположения в зависимости от его скорости. Поэтому для исключения ошибок связанных с обработкой сигнала в устройстве абонента здесь необходим иной алгоритм определения местоположения, чем тот, который мы использовали выше при 4-х КА в варианте НССС, так как при разностно-дальномерном методе время обработки в устройстве абонента не влияет на результат. Но, благодаря запросно-ответной системе можно менять как навигационные коды, так и их длительность с учётом сосредоточения энергетического потенциала в нужном направлении на абонента с синхронизацией по времени и с учётом подстройки по частоте Доплера и навигационному коду с повышением отношения сигнал/шум. И это невозможно сделать в системе ГЛОНАСС и GPS.
В этом случае вначале необходимо обеспечить связь двух КА с абонентом в режиме 60-ти лучей с получением подстройки по частоте и коду. Напомним, что как, указывалось выше, по системе ГЛОНАСС подстройка по 4-ём КА происходит параллельно в режиме поиска и подстройки по кодам в мобильном устройстве на 4-х частотах. На это затрачивается 4,9 млсек в каждом параллельном канале и 3,38 млсек уходило на информацию от КА (итого 8,28 млсек). С учётом того, что необходимо также использовать двухчастотный режим для исключения влияния среды, то общее количество параллельных каналов в устройстве абонента должно равняться восьми. Это конечно реализуемо, но требует неоправданного увеличения энергетических затрат и масса – габаритных характеристик. Кроме того, абонент будет в зоне обзора одновременно 4-х КА только в районах близких к полюсам (это удобно для привязки подводных лодок по координатам в северных широтах) и при методе ГЛОНАСС нет никакой возможности улучшить энергетические характеристики за счёт использования увеличения коэффициента усиления антенны в однолучевом режиме.
Поэтому, чтобы улучшить характеристики по энергетическому потенциалу, масса-габаритным характеристикам, а также по количеству используемых для навигации КА необходимо чтобы подстройка по частоте Доплера по этим четырём несущим частотам от КА и коду осуществлялась последовательно до захвата первых двух частот при применении суммарно-разностного дальномерного метода. Поэтому, запросный навигационный сигнал для первоначальной подстройки от КА должен излучаться каждые 1-5 секунд в течении 33,12 млсек по рисунку 8, так как мы не знаем, какие из 2-х близлежащих КА из 4-х КА с частотами (fка1, fка2, fка3, fка4) будут в пределах видимости абонента. Излучение запросного сигнала через 1-5 сек позволяет не тратить в режиме молчания энергоресурсы самого мобильного устройства абонента на обработку шумов без сигнала, а привязку часов с точностью до 10 млсек обеспечить достаточно легко, если в запросном сигнале указывать время КА с точностью до 1 млсек (в режиме молчания абоненту также не обязательно принимать запросные сигналы каждые 1-5 сек). Как указывалось ранее в сигнале от КА на абонента при рассмотрении метода навигации ГЛОНАСС в величине 4,9 млсек учитывается, что 1 млсек уходит на поиск по частоте в полосе 50 кГц, 3,8 млсек идут на подстройку по коду в 10 мксек, конечная подстройка по коду в 100 мксек сделана для улучшения отношения сигнал/шум в 10 раз. Кроме того, мы должны в конце последнего длинного навигационного кода, дающего улучшение сигнал/шум, выдать информацию, где 80 мксек (8 бит) определяют номер КА с какого пришло сообщение, 30 мксек (3 бит) определяют номер повторяющегося цикла, который потом будет передан на КА и укажет цикл при котором обеспечена подстройка, 210 мксек (21 бит) это временной счёт от 3 минут до 0,1 млсек (заметим ещё раз, что обновление данных счётчика как и эфемерид на КА происходит каждые 30 минут). Напомним, что можно использовать короткий сигнал в 10-20 мксек (1 бит) для временной синхронизации, выдаваемый с интервалом 8,28 млсек, который обеспечит неточность выставления часов КА и абонента относительно друг друга до режима навигации на величину не более 8,28 млсек так как дальность от КА до абонента не превышает эту величину. Итого 4,9 млсек +320 мксек=5,22 млсек на один цикл. В интервале 33,12 млсек по рисунку 8 для режима приёма как в системе Iridium при 6 циклах мы можем выделить на цикл 5,52 млсек. То есть, у нас остаётся ещё 30 бит на добавочную дополнительную информацию от КА. Будем считать, что значение в 2×5,52 млсек=11,04 млсек учитывает тот факт, что сигналы от КА при излучении их одновременно в варианте 60-ти лучей могут приходить к абоненту с разносом во времени в 8,28 млсек из-за задержки на распространение по дальности в разницу 2484 км.
После захвата сигналов от двух ближайших КА, в ответ от абонента излучается сигнал на одной общей частоте от мобильного устройства и подстройка по нему в приёмниках КА, как было показано ранее, займёт 2,9 млсек. Соответственно после кодового сообщения от абонента на запросный сигнал следует информация о времени окончания накопленных удлинённых кодов (максимально необходимое число, при такте в 152 МГц и при интервале задержки в устройстве абонента 33,12 млсек, соответствует величине 3634320), для чего требуется (1,84 млсек) с соответствующими номерами КА по 8 бит (2×320 мксек) и указанием номера повторяющегося цикла по 3 бита (3×2×40 мксек). Таким образом, от мобильного устройства на одной общей частоте передаётся сигнал длительностью 2,9 млсек +2,72 млсек=5,62 млсек.
Понятно, что для случая неподвижного абонента время обработки в устройстве абонента в 33,12 млсек роли не играет и может быть учтено в относительных временных единицах. Для абонента в виде движущегося ЛА со скоростью 2500 км/час мы будем иметь перемещение за это время на величину 23 метра. То есть, в реальности объект (абонент) может перемещаться. Однако мы уже говорили, что для определения местоположения достаточно выбрать 3 уравнения из системы (11). Например, при выборе 3-х нижних уравнений с разностным сигналом dc, с вычетом для суммарных сигналов D1ka, D2ka времени на обработку tобр и аппаратную задержку tап которые умножается на скорость света, мы будем определять местоположение абонента в момент излучения им сигнала на КА величиной 5,62 млсек из которых только первые 2,9 млсек необходимы для вычисления местоположения абонента. Соответственно ошибка определения местоположения при скорости ЛА в 2500 км/час составит 2 метра, что равно ошибке расстояния между выборками такта в 152 МГц без учёта сплайнов амплитуд этих выборок. Иными словами, такая ошибка находится в пределах одного импульса в 38 Мбит/сек при четырёх тактах в 152 МГц внутри импульса (8 метров). То есть, подстройка по коду уже будет осуществлена даже при такой скорости абонента. Таким образом, на первом этапе, представленном выше, при первоначальной подстройке по частоте и коду при запросно-ответных сигналах от двух КА мы можем суммарно-разностным дальномерным методом уже грубо определить местоположение абонента. Отсюда на втором этапе мы с учётом приближённых значений по местоположению абонента можем повысить энергетический потенциал в 4 раза, используя один луч в направлении абонента и в нужное время. Это позволит сократить длительность навигационного кода и соответственно время обработки этого сигнала в ПЛИС. Так, при коэффициенте усиления антенны в 30 дБ мы имеем ширину диаграммы направленности порядка 6 градусов [13] (на первом этапе при 60-ти лучах на КА это было 12 градусов). Таким образом, чтобы минимизировать влияние движущегося объекта из расчётов по дальности и для учёта влияния среды за счёт двухчастотного последовательного режима, необходимо разбиение на этапы, когда вначале осуществляется вхождение в синхронизацию по частоте Доплера и коду для двух КА с грубым определением местоположения абонента. При этом мы не учитываем, что на короткое время излучения запросного сигнала в течение, которое повторяется через 1-5 сек, можно повысить энергетический потенциал с улучшением отношения сигнал/шум с 13 Вт до 7 Вт×64 патч=448 Вт так как в многофункциональном режиме с учётом дистанционного зондирования Земли (как это будет показано ниже) всё равно требуются использовать усилители мощности для патч в 7 Вт). То есть в этом режиме, нам как для системы GPS может не потребоваться вначале осуществлять поиск по частоте Доплера и сразу можно использовать подстройку по коду порядка 10 бит за время 10 мксек. В этом случае скважность импульса в 10 мксек с мощностью 448 Вт будет равняться Q=35 с равенством энергетических потерь как при 13 Вт. Понятно, что такой режим исключает практически влияние на определение местоположения в зависимости от обработки сигнала в устройстве абонента. Следовательно, мы имеем ещё одно преимущество многофункционального использования КА НССС, которое однозначно обеспечит подстройку по частоте и коду с необходимой точностью, с учётом использования режима определения местоположения абонента, в КА. После первого этапа наступает время второго этапа метода запросно-ответного определения местоположения на основе суммарно-разностного дальномерного способа с учётом двух КА и минимальным временем обработки в устройстве абонента.
Вычислим, что нам даёт использование луча в 30 дБ вместо 24 дБ.
Так, при дальности D=2500 км, и частоте f =2,7 ГГц (λ=0,111 м) с коэффициентом усиления для каждой антенны КА в одном полотне Gпрд=1000 (30 дБ), Gпрм=Gаб=0,5 (-3 дБ), при мощности передатчика на один луч Pпрд =13 Вт и отношении сигнал/шум q=20 (вероятность ошибки для ФКМ сигнала 10-5-10-6), шумовой температуре Тш=600 К, k – постоянная Больцмана, необходимая полоса частот мобильного устройства для возможного приёма кодового сигнала навигации (потока информации) от КА вычисляется по формуле (6) и составляет 0,4 МГц. Отсюда минимальная длительность кода для навигации 2,5 мксек (95 импульсов в коде), это в 400 раз меньше необходимой длительности кода в 1 млсек для ГЛОНАСС и GPS. Так как подстройка по частоте с выбором полосы в 20-25 кГц уже осуществлена, то необходимая максимальная подстройка по частоте не будет превышать 100 мксек при соотношении сигнал/шум в 4 раза выше, чем это было на первом этапе. В данном случае подстройка по коду при его длительности как бита информации 2,5 мксек (95 импульсов в коде) будет определяться 95/2×2,5 мксек=118,75 мксек и далее используется удлинённый код с повышением отношения сигнал/шум в 10 раз, что будет составлять 25 мксек (950 бит в коле). То есть, на втором этапе мы ещё сохраняем режимы подстройки по частоте Доплера, но в уже выбранной полосе 20 -25 кГц и также осуществляем подстройку по коду, но при сокращении навигационного кода за счёт энергетического выигрыша в 4 раза за счёт антенны. Отсюда общее время на определение и захват сигнала от одного КА составляет 243,75 мксек. Такое же время отводится и на второй КА. Здесь мы используем такое время излучения по вычисленным значениям задержек от КА до абонента на первом этапе, чтобы это время излучения от КА учитывало вариант последовательного приема, и задержка определялась лишь неточностью при грубом определении разности времени прихода. В результате в сумме мы имеем на обработку с учётом расхождения по задержкам сигналов от КА порядка 500-600 мксек. Потом осуществляется излучение от абонента на одной частоте с указанием информации, какая передавалась от абонента и на первом этапе. Соответственно при скорости ЛА (абонент внутри ЛА) в 2500 км/час за 600 мксек изменение его положения составит 0,416 метров. Повторим, что эта величина задержки на обработку практически не влияет на точность местоположения по сравнению со среднеквадратичной ошибкой из-за распространения в среде (4,5 метра) и неопределённости пространственного расположения спутника (2 метра) [14]. Отсюда на втором этапе мы можем исключить влияние среды за счёт использования последовательного двухчастотного режима за счёт суммарно-разностного метода при запросно-ответной системе. При этом местоположение по дальности будет определяться в момент прихода сигнала к абоненту и его излучения с задержкой. Соответственно, КА при скорости в 8 км/сек (с учётом вращения Земли 463,839074 м/сек) за время распространения от КА к абоненту и обратно (почти 17 млсек), переместиться на 136 метров как показано на рисунке 11. Если же абонент движется с дозвуковой скоростью порядка 100 км/ч, то за это время 17 млсек он переместиться на 0,47 метров. Понятно, что в этом случае синхронизация часов КА и абонента может быть доведена до одного такта в 152 МГц, что составляет ±1 метр, а дальше точность может быть увеличена за счёт использования накопления сигнала кода и применения сплайнов. То есть ошибка здесь больше будет связана со средой распространения (4,5 метра), которая уменьшается за счёт использования двухчастотного последовательного метода. Однако многократное измерение может и эту ошибку значительно уменьшить. Напомним, что обычно на движущихся с большой скоростью объектах возможно размещение своих указателей скорости в пространстве, что также может быть учтено при определении местоположения абонента. Соответственно на третьем этапе мы переходим к варианту исключения предварительной подстройки по частоте Доплера и коду, так как подстройка осуществляется в самом навигационном сигнале. Здесь уже априорно известно значение частоты Доплера и его фаза в момент начала кодовой последовательности. В этом случае для несущих частот от КА можно обойтись излучением удлинённых кодов порядка 25 мксек (950 бит). Итого на первые несущие частоты от двух КА уйдёт на обработку в устройстве абонента порядка 50 мксек. Это даёт ошибку из-за движения ЛА со скоростью 2500 км/час в 0,0347 метров. Отсюда на третьем этапе мы будем уже достаточно точно определять местоположение ЛА и скорость его движения при повторяющихся периодически замерах.
Таким образом, при 2-х КА основная ошибка в определении местоположения из-за времени обработки внутри устройства абонента при использовании суммарно-разностного дальномерного метода связанная с движением абонента при подстройке по частоте Доплера и коду ничтожна мала, и она значительно меньше даже той ошибки, которая связана с длительностью сигнала ГЛОНАСС в 1 млсек из-за движения абонента.
Однако при использовании НССС в 98 КА есть зоны, где только один КА находится в пределах видимости абонента. Поэтому, далее, после временной синхронизации КА и абонента (это может происходить на экваторе каждые 6 минут при видимости 2-х КА), что также необходимо для режима разделения сообщений от абонентов к КА с минимальными зонами отсутствия сигналов, как это видно по рисунку 8, мы можем перейти на точное определение местоположения абонента, используя запросно-ответную систему по методу радиолокации с наличием только одного КА, и с учётом перемещения этого КА, где точки новых местоположений будут эквивалентны наличию дополнительных КА. При этом мы можем использовать уже направленную антенну от абонента с шириной диаграммы направленности в 60°×30° и коэффициентом усиления в 5 дб (3,16) вместо всенаправленной антенны в -3дБ (0,5), что также улучшит отношение сигнал/шум на 8 дБ (6,3 раза). Напомним, что при прохождении по горизонту по углу места 150o КА требуется 6-7 минут, отсюда достаточно менять положение направленной антенны один – два раза за всё время видимости КА, и это при приёме в дальней зоне, если конечно окажется так, что не будет хватать чувствительности приёмника абонента за счёт падения мощности сигнала при обслуживании максимального количества пользователей одновременно, и тут выбор, либо иметь данные, либо нет. Кроме того, запросно-ответная система позволяет в зависимости от ситуации менять как антенны, так и излучаемую мощность, что собственно даёт устойчивую связь в любом случае. То есть, сигнал о слабом принимаемом сигнале может также выдавать мобильное устройство и этот сигнал может учитываться в КА для распределения мощности и переключения антенн, как КА, так и абонента. Необходимо отметить, что направленные антенны используются и в режиме Интернет в таких системах как Starlink и One Web. По классике радиолокации при наличии известной дальности при излучении сигнала в одной точке и приёме сигнала в другой точке при полёте одного КА, с известным при этом местоположением КА в этих точках, мы будем иметь линию точек местоположения абонента в виде окружности перпендикулярно к движению КА (при базе из двух точек). Так как синхронизация часов КА с часами абонента при выполненной подстройке по частоте Доплера и навигационному коду уже произведена, то расстояния от времени излучения от КА к абоненту и времени излучения от абонента к КА известны, и они дают точку пересечения на плоскости. При этом при вращении этой плоскости перпендикулярно этой оси движения мы будем иметь окружность местоположения точек, где может находиться объект. Соответственно разность значений по дальности от этих точек КА также будет постоянна. И в этом случае нужна поверхность рельефа местности, пересечение с которой может дать местоположение объекта (абонента) или надо знать высоту полёта ЛА по тем же причинам. Собственно такой же результат даёт и наш суммарно-разностный дальномерный метод, когда известны только общая сумма расстояний от двух КА на плоскости (рисунок 10) и их разность как постоянных величин, при неизвестных значениях самих расстояний по отношению к каждому из двух КА. Для определения самих конкретных значений расстояний нам потребовалось два подвижных КА (четыре точки местоположения по рисунку 11) и это позволило обеспечить синхронизацию часов КА с абонентом на основе получения одной точки местоположения абонента. Чтобы с помощью только одного КА обеспечить однозначное определение дальности до абонента надо иметь точки измерения не в виде линии относительно абонента, а в виде многоугольника на плоскости (в частности треугольника) относительно абонента. В этом случае вариант линии местоположения абонента по окружности возможен только в случае расположения всех точек многоугольника на одной плоскости с абонентом, что требует пролёта КА на время его видимости непосредственно над абонентом и такой случай маловероятен, так как есть вращение Земли со скоростью 463,839074 м/сек, он также будет скорректирован при переходе к следующему КА через 6 минут.
Отметим, что условие синхронизации часов КА и абонента на основании видимости от абонента сразу двух КА требует, чтобы эта видимость была и на экваторе. По рисунку 12 видно, что пятна КА на экваторе пересекаются так, что нет областей, где бы через 6-7 минут не было бы варианта присутствия видимости от 2-х КА. При этом время для выдачи данных о местоположении абонента по системам ГЛОНАСС и GPS, в самый начальный период вхождения в режим определения координат, связано с передачей навигационного сообщения, которое имеет длину 36 000 бит и требует для передачи 720 секунд (12 минут).
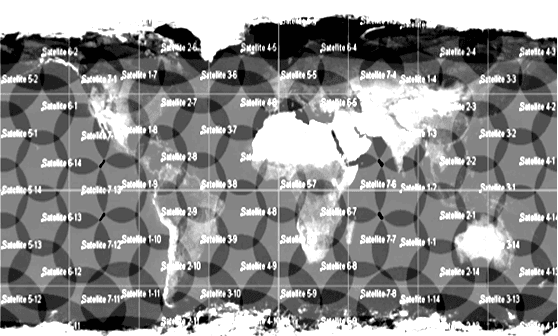
Рис. 12. Развёртка расположения КА
Однако наличие больших зон видимости абонентом только одного КА во времени порядка 6 минут и срочности определения местоположения может потребовать использование синхронизации по времени с абонентом и от одного КА. Конечно, в начале от одного замера при запросно-ответной системе можно использовать для предварительного грубого определения местоположения абонента упрощённую временную синхронизацию с выставлением луча АФАР в 30 дБ с подстройкой по частоте и коду в нужное время, не дожидаясь варианта видимости сразу двух КА. Предварительная синхронизация часов абонента и КА может быть выполнена следующим образом. Нам известно время излучения от КА на абонента-Т1, и время прихода сигнала от абонента на КА – Т2. Далее нам известно относительное время обработки в устройстве абонента – Т3 и время аппаратной задержки – Т4. Кроме того, нам известна радиальная скорость между абонентом и КА – Vr по формуле (9) по частоте Доплера. Отсюда время распространения от абонента до КА можно вычислить по формуле: [c×(T2-T1-T3-T4)±Vr×(T2-T1)]/(2×c)=t.
Соответственно время излучения от абонента известно и для синхронизации необходимо, чтобы время излучения от абонента Ti равнялось Toк=Т2-t. Отсюда мы получаем время смещения для коррекции tk=Ti±Toк. Конечно, это время не является точным, так как частота Доплера всё время меняется при движении КА, но есть способ улучшения точности, который приведён ниже. Собственно сам способ аналогичен суммарно-разностному дальномерному методу представленному для двух подвижных КА с той лишь разницей, что роль второго КА принадлежит одному общему КА, но при использовании не одного одновременного замера с получением сумм и разностей по формуле (11), а двух замеров с разных точек местоположения одного и того же КА. При этом для разностного сигнала от точки первого замера от КА к абоненту и второго замера от КА к абоненту надо сделать смещение на относительное время разности прихода между первым излучением от КА и вторым его излучением от КА – Т12. В этом случае разность времени прихода от первого и второго местоположения определяется Траз=Тприх1-(Тприх2-Т12). Аналогично вычисляется разностный сигнал и при излучении от абонента к КА в двух точках прихода обратно. Для суммарных сигналов всё остаётся аналогичным, как это было для варианта из двух КА. Далее мы также используем систему уравнений по формулам (11). То есть, мы получаем вариант аналогичный варианту от двух КА, но с добавлением необходимости вычитать из разностных значений время задержки между излучениями сигнала от КА до абонента и от абонента до КА Т12 между двумя замерами. Недостаток здесь в том, что абонент должен быть малоподвижен и за время Т12 он должен переместиться на расстояние меньше метра. Однако, есть и преимущество в том, что здесь нет требования синхронизации с часами других КА, и ошибка в определении местоположения КА будет иметь одну величину, что можно скорректировать исходя из сравнения с точкой расположения абонента по рельефу местности, координаты которого точно известны. Ситуация усложниться, если объект (абонент) имеет движение. Однако и этот вариант имеет решение, если знать скоростные параметры объекта (абонента) по всем трём ортогональным направлениям, а для большинства высокоскоростных абонентов такие внутренние навигационные системы используются практически всегда. В этом случае точки новых местоположений КА полученных за время Т12 смещаются в пространстве в соответствии с перемещением абонента по координатам. Иными словами, перемещение абонента как бы перекладывается на такое же изменение местоположения КА. Далее полученная точка пересечения может иметь сравнение с близлежащими точками рельефа местности. Отсюда мы получим необходимую дальность и обеспечим синхронизацию часов КА и абонента. Понятно, что при одном КА в случае подвижного абонента и отсутствии данных о его перемещении по координатам необходимо сокращать время Т12 между замерами и при этом увеличивать количество замеров, что позволит решить проблему синхронизации часов. Так при времени Т12=17 млсек и скорости абонента 200 км/ч мы получим ошибку 0,94 метра. При fнес=3 ГГц и этой скорости, частота Доплера Fд=555 Гц, что мы можем определить за время нескольких измерений и учесть в расчётах. То есть, при постоянной величине этой ошибки при замерах она может быть скорректирована и учтена априорно. С этой целью также можно использовать определение выборки такта с максимальной амплитудой, что получилось в приёмнике КА в сравнении с ожидаемой априорной выборкой такта при вычисленном значении местоположения абонента. Надо отметить, что метод определения координат абонента с помощью одного КА напоминает принцип работы локатора бокового обзора, с той лишь разницей, что здесь используется разрешение по одному объекту с лучшими параметрами из-за наличия запросно-ответной системы при более высоком энергетическом потенциале и с использованием как суммарного, так и разностного дальномерного метода при методах модуляции как ФКМ, так и ЛЧМ с изменением несущей частоты. Иными словами мы использовали комбинацию существующих методов с уменьшением количества используемых КА до одного, но с учётом запросно-ответной системы и вычислением задержек на обработку сигнала в устройстве абонента с переносом определения местоположения абонентов в устройстве КА.
Понятно, что пользователи системы связи автоматически становятся пользователями навигационной системы. Соответственно, теперь определим количество пользователей в предлагаемой системе НССС по сравнению с системой Iridium исходя из того, что в разговорном телефонном режиме (ТЛФ) обслуживается наибольшее количество пользователей и система Iridium в отличие от системы Globalstar имеет межспутниковую связь.
Будем исходить из того, что система Iridium имеет 48 лучей по 8 Вт в многочастотном режиме (6 частот одновременно) в каждом луче и используется режим работы с использованием сегментов полотен (у нас это 8 патч×8 патч=64) по аналогии с рисунком 7. В этом случае, при заявленных 1100 одновременно обслуживаемых пользователя [15], мы должны, помимо разделения по времени для четырёх пользователей, использовать и многочастотный режим при передаче от КА для 6 пользователей параллельно. В итоге общее количество пользователей равняется 48 лучей×4 последовательно×6 параллельно=1152. При этом понятно, что мощность передатчика в одном луче делится на 6 пользователей. Однако, как показывают расчеты, проведённые по формуле (6) даже на дальности в 2500 км и при 13 Вт на луч деление мощности на сигналы по 6 несущим частотам даст сокращение полосы пропускания в 6 раз, то есть вместо 100 кГц получится 16,6 кГц, при 8 Вт получится 13,3 кГц, это меньше необходимой заявленной полосы в 50 кГц в Iridium для обеспечения обслуживания 1100 пользователей. Это означает, что либо существует перераспределение мощности сигнала в зависимости от дальности, либо ухудшается качество связи до 2-3 кбит/сек и менее за счёт уменьшения отношения сигнал/шум. В случае конструкции КА по рисункам 6 и 7, если исходить из 60 лучей, то мы при тех же параметрах будем иметь 60 лучей×4 последовательно×6 параллельно=1440 с энергетическим проигрышем 1,25 раза. Поэтому нам необходимо уходить от многочастотного режима в 6 пользователей. Учитывая режим поиска и подстройки по методу [6, 7], где не требуется пилот – сигнал и подстройка происходит непосредственно по принимаемому сигналу, можно убрать преамбулу в 20 млсек (Simplex) по рисунку 8 и использовать её для ещё одного последовательного пользователя по времени. Отсюда имеем 60 лучей×5 последовательно×5 параллельно=1500 пользователей, причём сокращение количества одновременно излучаемых частот в одном луче (5 частот вместо 6 частот) позволяет снизить энергетические требования в 1,2 раза. То есть мы получили выигрыш по количеству пользователей 1,3 раза (за счёт увеличения количества лучей до 60) с проигрышем в энергопотреблении в 1,04 раза только за счёт использования режима поиска и подстройки по методу [6, 7]. То есть, конструкция, представленная на рисунке 6 с использованием способа [6, 7] даёт выигрыш в 1,25 раза даже без учёта выигрыша за счёт коэффициента усиления антенн из-за того, что угол сканирования не больше градусов в дальней зоне, и нет потерь на диаграмма образующие схемы Батлера или Бласса. С учётом использования у нас 98 КА на высоте 650 км против 68 КА для Iridium на высоте 780 км мы имели экономический проигрыш по затратам в 1,24 раза, но с учётом выигрыша в 1,25 раз получились практически равные экономические затраты. Однако, в методе [6, 7] используется цифровая обработка при приёме с тактовой частотой в 152 МГц и обработкой в ПЛИС с наличием АЦП и ЦАП, которые также необходимы в режиме многофункционального использования, и это требует значительных энергетических ресурсов. Но такая тактовая частота приемлема, так как даже в системе Iridium используется 7 процессоров с тактовой частотой 200 МГц. В случае необходимости сокращения энергетических потерь можно использовать вместо варианта по рисунку 3 функциональную схему по рисунку 4 с тактовой частотой АЦП в 76 МГц и без ЦАП. Заметим, что если в КА есть энергетический источник пополнения энергии за счёт солнечных батарей, то в мобильном устройстве абонента используются аккумуляторы и здесь расход энергии, при приёме, играет громадное значение, и нужно максимально сократить время приёма. Поэтому нам при передаче сигнала от КА желательно вообще убрать количество одновременно излучаемых частот за счёт использования последовательной передачи и это позволяет за счёт уменьшения длительности сигнала получить энергетический выигрыш. Собственно, если не учитывать класс режима работы усилителя мощности («А» или «В»), то, как при последовательной передаче во времени, так и при параллельной передаче, мы будем иметь схожие энергетические характеристики при передаче сигнала, так как параллельная передача позволяет сузить полосу пропускания параллельных каналов в количество одновременно излучаемых частот, но при этом увеличивается время, отводимое на приём. Последовательная передача хоть и сокращает количество одновременно излучаемых частот (N) с сокращением времени на передачу одного сигнала, но требует повышение мощности тоже в N раз. Понятно, что повышение мощности в усилителях мощности имеет ограничение. Так в системе Globalstar на усилитель мощности в многочастотном режиме она составляет 4,5 Вт при К.П.Д. 30%. Если исходить из мощности в 8 Вт на 64 излучающих элемента и в многочастотном режиме, то мы будем иметь на усилитель мощности 0,125 Вт для одного элемента излучателя (патч). При исключении многочастотного режима излучения на 5 частотах мы должны иметь необходимое повышение мощности в 5 раз, что соответствует импульсной мощности на усилитель в 0,625 Вт. Средняя мощность при скважности два (а именно такой режим используется в передатчиках КА Iridium) будет соответствовать величине 0,3125 Вт. Для сравнения средняя мощность в мобильном устройстве Iridium соответствует 0,64 Вт при импульсе в 7 Вт, что означает, что импульсная мощность на излучатель в антенне КА в 10 раз ниже импульсной мощности для мобильного устройства. Таким образом, переход на одночастотный последовательный режим с увеличением мощности на один излучатель в 5 раз позволит принимать 250 кбит/сек вместо 50 кбит/сек, и на одного пользователя будет отводиться в последовательном режиме 8,28 млсек/5=1,656 млсек. То есть время приёма на одного абонента сократиться в 5 раз. Однако в этом случае вместо 8 Вт на один луч из 60-ти мы должны иметь 40 Вт. И во столько же раз должно возрасти энергопотребление, если не учитывать расход мощности при многочастотном режиме по сравнению с последовательным режимом во времени.
Таким образом, вариант на излучение одновременно 6 сигналов в Iridium явно противоречит заявленным энергетическим характеристикам или количество одновременно обслуживаемых пользователей имеет меньшую скорость по передаче информации. И с таким же противоречием мы сталкиваемся и для нашего варианта в режиме 60 лучей. Однако в нашем конструктивном варианте по рисункам 6 и 7 возможно использование одного луча в 30 дБ и за счёт этого можно увеличить количество последовательно обслуживаемых пользователей в 4 раза при этом мы не будем иметь энергетических потерь, за счёт того, что луч направлен непосредственно на обслуживаемого пользователя. Но так как раньше было 4 луча работающих параллельно, то и энергетического выигрыша не будет, так как параллельно обслуживаемые пользователи от четырёх лучей перейдут в последовательно обслуживаемые пользователи, а количество одновременно излучаемых частот от каждого луча останется прежним. При этом мы будем иметь последовательно во времени 4×5=20 угловых положений луча при необходимых 16 угловых положениях покрывающих область от четырёх ранее используемых лучей (это из-за уменьшения ширины диаграммы направленности одного общего луча до 6°×6°, вместо 4 лучей с шириной диаграммы направленности 12°×12°). То есть абоненты обслуживаются последовательно с выставлением луча прямо на пользователя и это также даёт выигрыш в 3 дБ. Соответственно, при приёме сигналов от КА полоса пропускания с 50 кГц (50 кбит/сек) как в Iridium может быть увеличена до 50 кГц×4=0,2 МГц, и на одного пользователя будет отводиться в последовательном режиме 8,28 млсек/4=2,07 млсек (4600 бит/сек). Это означает, что время приёма в мобильном устройстве абонента сократится в 4 раза по сравнению с приёмом на мобильное устройство Iridium. Но количество одновременно обслуживаемых пользователей будет [5×4=20 (последовательно)×15 (лучей)]=300. Это явно недостаточно, хотя энергетического проигрыша нет. Но если учесть, что мощность в луче в 30 дБ возрастёт в 4 раза, так как будет равняться мощности патч от 4-лучей (а это 4×8 Вт=32 Вт в одном луче одного полотна), то мы получим необходимый энергетический выигрыш в 4 раза и в этом случае мы будем иметь в последовательном режиме 50 кГц×4×4=0,8 МГц (0,8 Мбит/сек) на одного пользователя. При этом на абонента будет отводиться уже 8,28 млсек/16=0,5175 млсек. Количество одновременно обслуживаемых пользователей возрастёт и будет [4×4×5=80 последовательно×15 лучей]=1200. Это уже соизмеримо с тем, что было заявлено в Iridium, но без использования управления мощностью в зависимости от дальности и ухудшения чувствительности из-за большого количества пользователей одновременно. Если учесть, что энергетический выигрыш в усилителе мощности от использования одночастотного режима класса «В» выше по сравнению с многочастотным режимом в классе «А» в 1,625 раза, то мы можем ещё больше сократить время на приём для одного абонента до 0,3185 млсек с возрастанием количества обслуживаемых абонентов до 1950 при 52 Вт на один луч (0,2 Вт в импульсе при скважности 2 на один излучающий элемент, что даёт среднюю мощность в 0,1 Вт). При этом время приёма для абонента сократится в 26 раз по сравнению с режимом приёма в Iridium, а скорость передачи информации возрастёт до 1,3 Мбит/сек. Отметим, что эти расчёты проведены без учёта направленной антенны абонента, а именно такая тенденция наблюдается сейчас в системах One Web и Starlink для обеспечения Интернет и видеоконференций. Надо напомнить, что так называемая ненаправленная антенна также не является всенаправленной антенной и при недостаточной чувствительности на сигнал также требует поиска по направлению. С учётом использования направленной антенны абонента, состоящей из 2-х патч в 5 дБ (3,16 раза) на КА по сравнению с всенаправленной антенной в -3дб (0,5) мы получим энергетический выигрыш даже на краях ширины диаграммы направленности антенны абонента по сравнению с антенной мобильного устройства Iridium в 3,16 раз. И этот выигрыш мы можем использовать как для повышения отношения сигнал/шум в режиме видеоконференций, так и для увеличения количества пользователей с одновременным сокращением времени приёма для одного пользователя. В этом случае скорость передачи информации возрастёт до 4,108 Мбит/сек с выделяемым временем на пользователя порядка 100 мксек и с увеличением количества обслуживаемых пользователей до 6162. Можно заметить, что мы не используем режим гибкого управления мощностью усилителей мощности АФАР, когда мощность определяется дальностью до абонента, которая меняется в 2500 км/650 км=3,846 раза, и это даёт изменение мощности от максимума до минимума в 14,79 раз, что говорит о том, что в режиме передачи от КА можно обойтись без направленной антенны. Таким образом, выигрыш по времени приёма для устройства абонента будет как минимум в 82 раза. Понятно, что такое время приёма позволяет совмещать функции связи и навигации, так как за 0,1 млсек ЛА (как абонент) при скорости в 2500 км/ч сменит положение всего на 0,069 м, что ниже, чем другие ошибки в местоположении. Преимущество последовательного метода и в том, что луч АФАР будет устанавливаться непосредственно на абонента. Отсюда весь комплекс в 98 КА одновременно обслуживает 603876 пользователей. Для примера количество зарегистрированных пользователей Iridium составляет около миллиона абонентов. Ещё одно преимущество заключается в том, что при последовательном режиме на передачу от КА к абонентам нет необходимости менять несущую частоту, если это не связано с режимом исключения внешних помех или не требуется из-за обеспечения режима скрытности (здесь также можно использовать ЛЧМ-модуляцию). Отметим также, что использование направленной антенны абонента в 14,5 дБ [10] с размерами 16,5 см×16,5 см позволяет уже использовать Интернет со скоростью передачи в 36 Мбит/сек. Для примера в системе Starlink пользовательский терминал имеет диаметр – 61 см, высота ножки-подставки – около 50 см [16]. Как будет показано ниже, многофункциональное использование требует мощность на излучатель патч в антенне КА в импульсе 7 Вт, а это 1793 Вт на полотно, что позволяет при необходимости значительно повысить скорость передачи с использованием режима QAM до 38 Мбит/сек×3=114 Мбит/сек и обойтись даже приёмом сигнала Интернет на мобильное устройство без дополнительной антенны.
При этом в одном кадре в 90 млсек (рисунок 8) у нас остаётся ещё не использованных 7,2 млсек. При скорости передачи информации в 1,3 Мбит/сек без использования направленной антенны абонента мы будем иметь каждые 0,9 секунды возможность для передачи информации в 93,6 кбит. Напомним, что 36 кбит требуется для режима навигации с передачей в течение 720 секунд (12 минут). Помимо этого, так как 7,2 млсек повторяются 1,11 раз в течение секунды, то это время каждую секунду можно использовать для режима «дозвона», на который будет отводиться практически 80 млсек. Тогда в режиме 60-ти лучей для запросно-ответных сигналов для начального вхождения в связь с определением местоположения, при котором от КА на абонента и обратно уходит 23,91 млсек+8,28 млсек=32,19 млсек, можно использовать два этапа поиска и подстройки для режима навигации. Иными словами, можно на этапе «дозвона» формировать с разделением по времени 120 угловых положений лучей с разным коэффициентом усиления антенны в зависимости от дальности, что обеспечит надёжное вхождение в связь КА с абонентами. Так как, к третьему этапу подстройка по частоте и коду уже осуществлена в режиме связи, и навигационный код будет составлять 9-10 бит, при 4 Мбит/сек передаваемой информации (с использованием управления мощностью в зависимости от дальности даже ещё меньше с применением кода Баркера в 7 бит), то мы каждые 0,09 сек будем иметь обновление информации о навигации для каждого пользователя. При средней скорости абонента в 160 км/час, при отсутствии даже априорных данных, объект за 0,09 сек сместится всего на 4 метра. Так как синхронизация по коду выполнена с точностью до такта в 152 МГц, а точность определения местоположения абонента определяется по 4 тактам одного импульса в 38 Мбит/сек, которые по времени дают расхождение по дальности на 2 метра (итого 8 метров), то неопределённость в 4 метра не даст выхода из режима синхронизации по коду и эта повторяющаяся ошибка может учитываться априорно. При этом нет необходимости повторять навигационный код 100 раз (100 мксек), так как источник информации заложен в фазе кода и у нас есть временная синхронизация по коду. Это позволяет менять код для каждого бита информации, что делает информационный сигнал шумоподобным. Понятно, что для учёта влияния среды сигнал от КА на абонента будет приходить, например, в верхнем диапазоне принимаемых антенной частот, а от абонента на КА будет поступать сигнал в нижнем диапазоне принимаемых антенной частот. Собственно, учитывая точное определение местоположения можно в синхронном режиме использовать в течение 100 мксек и ЛЧМ сигналы с кодированием информации по фазе, что обеспечит скрытность самого сигнала в шумах. Надо отметить, что переход на последовательный режим обслуживания абонентов во времени при передаче от сигналов от КА соответствует режиму Internet с сокращением длительности импульсов и повышению мощности в импульсе с расширением полосы пропускания антенны.
Теперь надо определить параметры сигналов на передачу от мобильных устройств на КА. Здесь, наоборот, при приёме на КА лучше использовать многочастотный режим, так как мощности мобильных устройств в импульсе не зависимы друг от друга. В Iridium используется на приём 6 каналов одновременно и время приёма разбивается на 4 канала с последовательным приёмом, что и даёт одновременное обслуживание одним КА 1152 абонентов. В нашем случае в режиме 60 лучей при последовательном приёме с разделением времени приёма на 5 частей и одновременном приёме в каждой части по 5 пользователей, мы получим обслуживание 1500 пользователей, что недостаточно, так как в режиме передачи от КА на абонентов мы можем обслужить 6000 пользователей. Поэтому мы переходим в режим одного луча, в 30 дБ, который, казалось бы, не даст выигрыша, если просто перевести пользователей из одновременного параллельного режима в последовательный. Однако мы в режиме одного луча можем также увеличить количество одновременно обслуживаемых пользователей, так как 5 пользователей которые могли быть задействованы в каждом из 4-х лучей одного полотна АФАР одновременно, теперь могут все приниматься в одном луче, который за 16 последовательных угловых положений обойдёт весь сектор обзора от четырёх лучей. В итоге мы получим количество одновременно обслуживаемых абонентов за один цикл приёма в [15 лучей×20 последовательно×20 параллельно]=6000 абонентов. В этом случае длительность сигнала, излучаемого абонентом, сокращается до 8, 28 млсек/4=2,07 млсек при скорости передачи информации в 200 кбит/сек. При этом, так как время, отводимое на одного абонента, уменьшилось в 4 раза, то средняя энергия мобильного устройства упадёт также в 4 раза с 640 млВт до 160 млВт из-за увеличения скважности в 4 раза. Таким образом, мы имеем энергетический выигрыш для мобильного устройства при КА по рисунку 6 в 4 раза по сравнению с мобильным устройством Iridium. Однако при использовании 20 параллельных каналов нам необходимо использовать функциональную схему по рисунку 4. В этом случае при наличии на одном полотне АФАР – 20 ПЛИС (4 ПЛИС в центре полотна и по 4 ПЛИС в каждом квадранте) мы с использованием двух подключённых к нему АЦП по синусу и косинусу можем использовать тактовую частоту дискретизации в 38 МГц. С учётом кода в [3(Мбит/сек)/0,2 (Мбит/сек)]=15 бит мы получим 20 параллельных каналов. Так как тактовая частота на АЦП будет порядка 38 МГц, то это снижает энергетические потери по сравнению с использованием функциональной схемы по рисунку 3. Но, отметим, что при использовании направленной антенны абонента в 5 дБ (3,16 раз), мы можем сократить количество параллельных каналов с 20 до 7-8, что соизмеримо с количеством параллельных каналов в Iridium (6 параллельных каналов по 50 кГц) и в Globalstar (13 параллельных каналов по 1,23 МГц). В этом случае скорость передачи информации возрастёт до 632 кбит/сек, что важно в режиме видеоконференций. При этом длительность излучаемого сигнала от абонента уменьшится до величины в 0,655 млсек с соответствующим снижением средней потребляемой мощности в устройстве абонента до 50,63 млВт, то есть энергетический выигрыш в режиме передачи для устройств абонента возрастает в 10 раз! Однако, мы, используя направленную антенну с двумя излучающими элементами, при круговой поляризации и подключением к каждому излучающему элементу с двух перпендикулярных сторон по усилителю мощности в 7 Вт (общая мощность в импульсе 4x7 Вт=28 Вт) можем увеличить скорость передачи с 632 кбит/сек до 2,528 Мбит/сек. Это не приведёт к улучшению энергетических характеристик мобильного устройства, зато сократит количество параллельных каналов с 7-8 до 2 параллельных каналов, что позволит более точно устанавливать луч АФАР на абонента и одновременно сократит энергетические потери, так как в работе на приём буду работать только два ПЛИС с передачей кодов в 38 Мбит/сек (вместо 8-ми ПЛИС с передачей кодов в 3 Мбит/сек) с длительностью времени на каждого абонента в 165 мксек в течении 0,09 млсек (4,6 кбит/сек). Отметим, что использование более удлинённых излучаемых сигналов от абонента до КА (в 1,5-6 раз по сравнению с сигналом от КА к абоненту) не является критичным, так как не затрагивает времени на обработку внутри устройства абонента и оно меньше, чем длительность даже навигационного кода ГЛОНАСС почти в 2 раза. Отметим, что обслуживание 400 абонентов на одном из 15 АФАР требует контроля за параметрами сигналов этих 400 абонентов. Это можно обеспечить, если задействовать 64 малоразмерных ПЛИС которые определяют отклонение луча АФАР по рисунку 7 которые предназначаются для изменения фазы с целью управления лучом АФАР. В этом случае на один ПЛИС из 64-х будет приходиться обслуживание 6-7 абонентов по обеспечению синхронизации по времени и определению частоты и фазы. Однако можно использовать (за счёт дополнительных 3 ФАПЧ на полотне АФАР с передачей кодов в 38 Мбит/сек) предварительное удлинение времени излучения от абонента на КА для подстройки, с некоторым ростом энергетических потерь в устройстве абонента и в устройстве КА. Кроме того, мы можем переложить отслеживание параметров по синхронизации и частоте с учётом априорных значений на самих абонентов, передав необходимые конечные данные от КА, так как дальность нам будет известна с точностью меньше метра. Для использования передачи информации со скоростью 38 Мбит/сек и при применении антенны абонента в 14,5 дБ надо иметь мощность в импульсе в 52 Вт. С учётом четырёх патч используемых в антенне [10] и при использовании круговой поляризации при подключении двух усилителей мощности в 7 Вт (это усилители Iridium) с двух сторон перпендикулярно направленных друг к другу мы получим общую мощность 2×4 патч×7 Вт=56 Вт, что обеспечит Интернет от абонента к КА. Ещё раз отметим, что усилитель мощности в 4,5 Вт в системе Globalstar который использовался в многочастотном режиме «А» при использовании его в одночастотном режиме «В» тоже бы мог дать мощность 1,625×4,5 Вт=7,3 Вт.
Таким образом, КА для НССС по рисунку 6 и с методом подстройки [6, 7] обеспечивает не только многофункциональное использование, но позволяет обслуживать в 5 раз больше пользователей, чем система Iridium и даёт экономию энергопотребления мобильного устройства в 10 раз в режиме передачи. В режиме приёма мобильное устройство имеет выигрыш в 82 раза, что означает, что цифровая обработка с тактовой частотой в 152 МГц даже при росте энергопотребления при приёме в 8 раз, также обеспечит выигрыш в 10 раз. Соответственно энергопотребление в КА НССС по рисунку 6 не превышает энергопотребления в системе Iridium.
Чтобы использовать возможности быстрой фазовой подстройки в режиме сообщений с навигационными данными, надо при использовании последовательного режима заранее выставлять значение частоты Доплера с фазой этого сигнала через каждые 0,09 секунд, а также обеспечить подстройку по коду не хуже такта в 38 МГц (за это время сигнал проходит почти 8 метров). С учётом того, что точность определения местоположения абонента и КА составляет метры, а также дальнейшее их положение можно спрогнозировать, и синхронизация по времени составляет величину в 152 МГц, то данная задача вполне может быть решена. С этой целью значение частоты Доплера и значение фазы в конце сообщения запоминаются и на их основе с учётом известного времени прихода сигнала в следующий момент через 0,09 сек вычисляются новые значения с которых начнётся приём следующего сообщения от абонента. Аналогично высчитывается и время начала следующего навигационного кода. Собственно такой подсчёт делается и в системе Iridium и Globalstar (в Globalstar нельзя без подстройки по коду в 128 бит обеспечить приём информации). Необходимо отметить, что знание навигационных данных о местоположении абонента с точностью до метра позволяет не только прогнозировать саму частоту Доплера, но и знать её изменение, а также выставлять время синхронизации по коду с учётом изменения параметров по несущей частоте, что повышает помехозащищённость. В принципе можно перед сообщением отвести на установление режима некоторое время порядка 1 мксек (в устройстве КА можно за счёт дополнительных 3-х ФАПЧ использовать предварительную подстройку и по коду и по частоте Доплера), если не обеспечивать сброс значений с цифровых фильтров за 1 такт в 38 МГц, что конечно более предпочтительно. Для сигналов в приёмнике КА это время установления может быть ещё больше. Заметим, что при передаче информации в 4 Мбит/сек при соотношении сигнал/шум q=20 и при длительности сообщения в 100 мксек, мы для фильтрации по частоте Доплера можем иметь полосу пропускания всего 10 кГц и менее. При этом соотношение сигнал/шум для сдвига по частоте Доплера возрастёт до q=8000, что означает наличие шума только в нижнем разряде АЦП. Учитывая то, что мы имеем привязку по времени, то мы можем менять навигационный код в каждом бите информации, что повышает помехоустойчивость и позволяет работать в том же диапазоне частот, в котором работают многие узкополосные системы, не мешая им. Отметим, что как Iridium (полоса 10,5 МГц), так и Globalstar (полоса 16,5 МГц) узкополосные системы и поэтому не могут выполнять роль навигационных систем и использоваться для Internet. Вместе с тем, если предположить работу КА НССС по рисунку 6 в диапазоне 2,35 ГГц-2,55 ГГц, что соответствует частоте 2,4835 ГГц-2,5 ГГц системы Globalstar, то при полосе нашего сигнала в 38 МГц по сравнению с полосой в 1,23 МГц наш сигнала будет иметь затухание в полосе приёмников абонентов в 30,89 раз, а с учётом кода в N= 128 бит затухание возрастёт ещё в (N)1/2=11,3 раз. Итого затухание будет в 349,48 раз (25,4 дБ). Кроме того, у нас есть возможность перестройки несущей частоты в течении каждого определённого сообщения и знание местоположения абонента с учётом режима временной синхронизации позволяет также использовать и частотную модуляцию несущей частоты. В этом случае нет дискретных составляющих из-за повторения, по которому можно было бы выделить сигнал и считать его не шумом. Иными словами, наш сигнал будет невозможно выделить из шумов в приёмнике чужого абонента, так как полоса используемых частот лежит в диапазоне 200-300 МГц с многоуровневым кодированием. С точки зрения кодирования наш сигнал может использовать все три основных вида модуляции: фазовую, частотную и амплитудную. Отсюда нет никаких препятствий с точки зрения разрешения от государственного комитета по радиочастотам (ГКРЧ) использовать для наших целей именно оптимальный диапазон несущих частот порядка 3 ГГц. Собственно с целью исключения влияния мешающих воздействий на другие радиотехнические устройства можно организовать предварительный режим радиотехнической разведки в данном угловом секторе, и не работать в диапазоне, где обнаружены иные радиотехнические средства.
Однако оценим экономическую выгоду представленного варианта навигации через НССС по сравнению с группировкой ГЛОНАСС. Экономическая выгода метода уже в том, что при запросно-ответной системе абонент платит за навигационные данные, как и пользователи мобильной связи, и при этом обладатель спутниковой системы получает деньги не в зависимости от количества проданных навигационных мобильных устройств, а постоянно при предоставлении услуги по навигации. Далее, по стоимости группировка в 98 спутников связи дешевле, чем группировка в 24 спутника системы ГЛОНАСС, так как вес одного спутника системы ГЛОНАСС – К составляет 935 кг (вес GPS-IIF 2170 кг, но с радиационной защитой). У нас вес одного спутника в самом худшем случае, если ориентироваться на вес спутника Iridium не более 689 кг (вес спутника Globalstar – 550 кг). При этом для запуска спутника ГЛОНАСС требуется потратить топлива больше как минимум 19000 км/650 км =29,2 раза. Отсюда по стоимости новая группировка ГЛОНАСС в 24 спутника будет превосходить стоимость от нашей группировки в 98 КА как минимум в (24 (КА)×935 кг×29,2)/(98 (КА)×689 кг)=9,7 раза. При этом, система ГЛОНАСС не имеет возможности к самоокупаемости, так как производство навигаторов захватили зарубежные фирмы и абоненты получают информацию по навигации бесплатно. В нашем случае навигационные данные входят в количество обслуживаемых по связи абонентов, так как данные от навигации позволяют поднять количество одновременно обслуживаемых абонентов. Кроме того, наличие связи позволяет передавать данные о местоположении непосредственно между абонентами через КА или между собой.
Понятно, что предлагаемый нами метод определения местоположения имеет высокую помехозащищённость, так как позволяет использовать разные кодовые сигналы на разных частотах и разной длительностью с учётом того, что узкий луч АФАР исключает помехи от другого местоположения. Кроме того возможно использование направленной антенны от абонента, что также улучшает характеристики и повышает помехозащищённость. Связь с другими аналогичными устройствами для совместимости можно вести через Wi-Fi, тем самым уменьшая среднеквадратичную ошибку.
Таким образом, мы показали, что:
- возможна реализация метода навигации ГЛОНАСС (GPS) для НССС с учётом способа быстрой фазовой автоподстройки [6, 7] с использованием подстройки вначале по частоте, а затем по навигационному коду, что позволяет исключить разрушение кода навигации от перескока фаз по частоте Доплера в диапазоне от 0 до 150 кГц. При этом энергетический потенциал КА НССС, при конструктивном решении расположения антенн КА по рисунку 6, позволяет сократить длину навигационного кода в сто и более раз, а запросно-ответный режим позволяет менять как сам навигационный код, так и несущую частоту индивидуально для каждого абонента и сочетать режимы связи (смс-сообщения, разговорный, видеоконференция, Интернет) с режимом навигации;
- при использовании запросно-ответной системы навигации в целях повышения точности навигации и сокращения информации, посылаемой на абонента для определения его местоположения, а также сокращения масса – габаритных и энергетических затрат мобильного устройства абонента следует также использовать в режиме ГЛОНАСС (GPS) формирование навигационного кодового сигнала от абонента к КА;
- при применении запросно-ответной системы для НССС из-за самого движения КА и их видимости абонентом в течение 6-7 минут возникает возможность использования только двух КА для определения местоположения абонента (как неподвижного, так и подвижного) с использованием более точного суммарно-разностного дальномерного метода;
- определение местоположения абонента при отсутствии временной синхронизации КА с абонентом возможно также и при видимости от абонента только одного КА, но для случая неподвижного абонента или для случая, когда движение абонента фиксируется по его скоростным параметрам в пространстве от его собственной системы навигации, а также при скорости, когда можно спрогнозировать его параметры движения на основе анализа тактовых выборок при накоплении и частоты Доплера, с точным определением прохождения расстояния его в пространстве за заданный промежуток времени (обычно в пределах одной минуты);
- после первоначальной подстройки возможно совмещение навигационного режима и разговорного режима.
Теперь определим всю логическую цепочку предлагаемого решения. Условие сочетания разговорного телефонного режима с Интернет при передаче сообщения в 30-40 Мбит/сек потребовали повышение тактовой частоты при цифровой обработке бита информации по теореме Котельникова как минимум в 3-4 раза выше (с учётом того, что тактовый импульс дискретизации не является дельта-функцией). Однако при этом надо помнить, что повышение частоты приводит к увеличению потерь в квадрате, отсюда следует оптимальный выбор тактовой частоты в пределах 120-160 МГц. При этом выбор такой тактовой частоты, с целью сокращения энергетических потерь на обработку сигналов, требует ухода от параллельных многочастотных схем обработки сигналов к одночастотной обработке или к варианту снижения тактовой частоты. На низких орбитах пролёта КА при несущей частоте в районе 3 ГГц, частота Доплера меняется и может достигать кГц. При этом выбор несущей частоты порядка 3 ГГц связан с использованием многофункционального режима для навигации (необходимость двух частот разнесённых на 300 МГц для исключения влияния среды), радиовысотомера и РЛС бокового обзора (с учётом частотной модуляции в 300 МГц для разрешения в 1 м). Соответственно, выбирать несущую частоту значительно выше 3 ГГц также не оптимально, так как в этом случае вместо планарного расположения плат вдоль антенны с использованием патч, что даёт выигрыш в габаритах, массе и способе раскрытия конструкции в космосе, придётся использовать перпендикулярное расположение плат к антенне («слотовое») с волноводно-щелевой конструкцией. Переход на частоту выше 3 ГГц также приводит к уменьшению чувствительности из-за уменьшения площади антенны, растут потери из-за поглощения в среде. Изменение частоты Доплера в кГц требует раздельной подстройки по частоте и коду, в отличии от режима навигации GPS. Отдельная подстройка по частоте связана с исключением информации по фазе, что реализуется по схеме Костоса и требует использования многоразрядного АЦП чтобы иметь высокую скорость передачи информации, чего нет в GPS, и это не даёт возможности совмещения функций навигации и Интернет. Многоразрядный АЦП также требуется при параллельной обработке сигналов от абонентов от 2-х до 20-ти с целью исключения подавления слабых сигналов сильным сигналом по амплитуде. Соответственно здесь ЦАП по рисунку 3 должен формировать не только частоту Доплера на основе синтеза частоты Доплера в ПЛИС, но и выдавать сигнал информации со скоростью 30-40 Мбит/сек. Отсюда наш выбор АЦП, ПЛИС и ЦАП [6, 7] для тактовой частоты в 152 МГц. Сокращение энергетических потерь в сочетании с режимом навигации потребовали использование одночастотного режима класса «В» вместо режима «А» при передаче сигнала от КА на абонента с сокращением, как кода навигации, так и времени выделяемого для сообщения одному пользователю, что позволяет снизить также энергетические потери при цифровой обработке в самом приёмнике абонента из-за малой длительности работы при высокой тактовой частоте в 152 МГц. При этом требуется быстрая подстройка по частоте и фазе по методу [6, 7] из-за малого времени на каждое выделяемое сообщение порядка 100 мсек, и это достигается за счёт использования одночастотного режима в импульсе с повышением чувствительности для сигналов порядка 4 Мбит/сек (q=20), при этом отношение сигнал/шум для выделения частоты Доплера будет в 400 раз выше (q=8000). Режим навигации по определению местоположения абонента благодаря временной синхронизации позволяет использовать побитное кодирование информации с использованием изменения частоты, что обеспечивает скрытность и помехозащищённость, и нет мешающего воздействия другим устройствам этого диапазона. При этом, при известном местоположении абонента и КА стало возможным применять узконаправленные лучи как в конструкции КА с соответствующим расположением антенн, так и в конструкции антенны абонента для режима Интернет. Соответственно для сохранения режима одновременного обзора всего пятна под спутником с целью первоначальной связи с абонентом должен предусматриваться режим множества лучей как в Iridium и Globalstar. Это определило разбиение одного полотна АФАР из 15-ти в КА с коэффициентом усиления луча в 30 дБ на 4 более мелких секторных антенны по квадрантам с коэффициентом усиления аналогично коэффициенту усиления антенны Iridium (24 дБ). В итоге мы получили 60 лучей в предлагаемом КА против 48 лучей в Iridium. Иными словами, гибкая конструкция расположения антенн с изменением при необходимости углов наклона антенн и самого КА позволяет максимально использовать энергетический потенциал в нужном направлении. Конструкция антенны мобильного устройства абонента также усовершенствована, и на основе 2-х патч с 4-мя усилителями мощности по 7 Вт позволяет формировать как круговую, так и вертикальную, горизонтальную поляризации, что позволяет убрать мешающие отражения от поверхности Земли. Кроме того, мощность в импульсе может достигать 28 Вт вместо 7 Вт и с учётом направленной антенны в 5 дБ (3,16 раз) энергетический потенциал возрастает в 12,4 раза, что позволяет в любом случае обеспечить устойчивую связь даже за пределами ширины диаграммы направленности антенны абонента. При этом желательно использовать аксессуар в виде наушников и микрофона или включать «громкую связь», так как, не смотря на то, что мы имеем сокращение времени работы в импульсном режиме в 40 раз по сравнению с таким импульсном режимом при 7 Вт в мобильном устройстве Iridium с уменьшением средней мощности в 10 раз, но подносить мобильное устройство к уху нежелательно по медицинским требованиям в любом случае. Это обеспечивает повышение передачи информации с 50 кбит/сек (Iridium) до 2,5 Мбит/сек и сокращает необходимое количество параллельных каналов до 2-х в приёмнике АФАР при обслуживании одним КА 6000 пользователей с сокращением энергетических потерь на цифровую обработку. Соответственно связь с другими устройствами для совмещения функций можно реализовать через Wi-Fi. Таким образом, мы показали, что дальнейший путь развития КА будет связан с многофункциональным исполнением при оптимизации радиотехнических параметров, отсутствием мешающего воздействия на другие радиотехнические системы и соблюдением экономической эффективности при минимальном весе и габаритах, так как в противном случае катастрофическая засорённость космоса неизбежна.
