Принципы радиоуправления БПЛА связаны с передачей информации путём модуляции излучаемого радиосигнала на основе чего и выбирается вариант блока для радиоуправления. При этом может быть использована амплитудная, фазовая и частотная модуляции. Самым простым способом является амплитудная модуляция, однако этот сигнал легко обнаруживается средствами радиотехнической разведки (РТР) и по нему может формироваться радиопомеха средствами радиоэлектронной борьбы (РЭБ) и обеспечиваться наведение противорадиолокационной ракеты. Поэтому в целях обеспечения скрытности излучаемого сигнала радиоуправления от средств РТР необходимо использовать как фазовую, так и частотную модуляцию (это даёт «размазывание» спектра сигнала до уровня спектра шума) с сокращением времени передачи, что аналогично амплитудной модуляции. Понятно, что высокая скорость перестройки параметров модуляций повышает скрытность излучаемого сигнала радиоуправления. Отсюда современная тенденция развития блоков радиоуправления связывается с цифровой обработкой сигнала, и это позволяет гибко и быстро менять параметры используемых сигналов как по несущей частоте, способу модуляции, методам подстройки, кодированию и накоплению сигналов с целью обеспечения помехозащищённости. Кроме того желательно иметь и многофункциональность с возможностью выделять сигналы других радиоэлектронных средств и формировать помеховые сигналы радиоэлектронным средствам противника в зоне пролёта БПЛА. Это особенно важно, когда прорыв зоны противовоздушной обороны будет осуществляться за счёт массированного применения БПЛА, так как отдельный БПЛА будет обнаружен и уничтожен. Одновременно с этим, в местах пролёта БПЛА для нанесения точного удара по средствам противника может осуществляться радиолокационное дистанционное зондирование Земли с целью выявления замаскированных целей, которые не видны в оптическом диапазоне. Соответственно, при отсутствии надёжной связи с ретранслятором (РТ) сигнала радиоуправления и определения местоположения по системе ГЛОНАСС может использоваться привязка местоположения БПЛА по «реперным» точкам, в местах пролёта, когда радиопередатчики, выставленные разведкой в этих точках, включаются в определённый момент времени по кодовому сигналу, и это обеспечит точную навигацию. Понятно, что типы БПЛА могут быть различные и желательно иметь унифицированный блок радиоуправления вне зависимости от типа БПЛА, что позволяет обеспечивать их совместную работу в общем комплексе. Отсюда стоит вопрос в оптимизации схемы и программы блока радиоуправления БПЛА с точки зрения радиотехнических параметров при многофункциональном использовании и унификации. Использование БПЛА с дальностью полёта до 400 км связано с их применением как в качестве средств разведки, средства нанесения ущерба за счёт подрыва боезаряда в нужном месте, и это невозможно без надёжного помехозащищённого радиоуправления с приёмом и передачей радиосигналов, соответственно БПЛА могут использоваться как средства радиопомех (например, многократная ответная помеха) для прикрытия последующих эшелонов ударных летательных аппаратов. Для обеспечения высокой помехозащищённости при радиоуправлении требуются кодовые сигналы большой длительности для накопления с соответствующим улучшением отношения сигнал/шум, и при этом желательно иметь длительность символа кода как можно меньше, что затрудняет его выделение из шумов и даёт возможность его использования ещё и в качестве сигнала, например, для навигации и дистанционного зондирования Земли. Одновременно с этим необходимо обеспечить когерентную обработку для повышения чувствительности, что связано с подстройкой по сдвигу частоты Доплера за счёт ФАПЧ. Учитывая, что вероятность ошибки для фазо-кодо-манипулированного сигнала (ФКМ) по рисунку 1 [1] наиболее низкая, и при этом можно обеспечить высокую помехозащищённость, то при выборе начальной схемы радиоуправления БПЛА надо придерживаться решения для такой оптимальной обработки, и уже с учётом этого рассматривать возможность использования сигналов с частотной и амплитудной модуляцией.
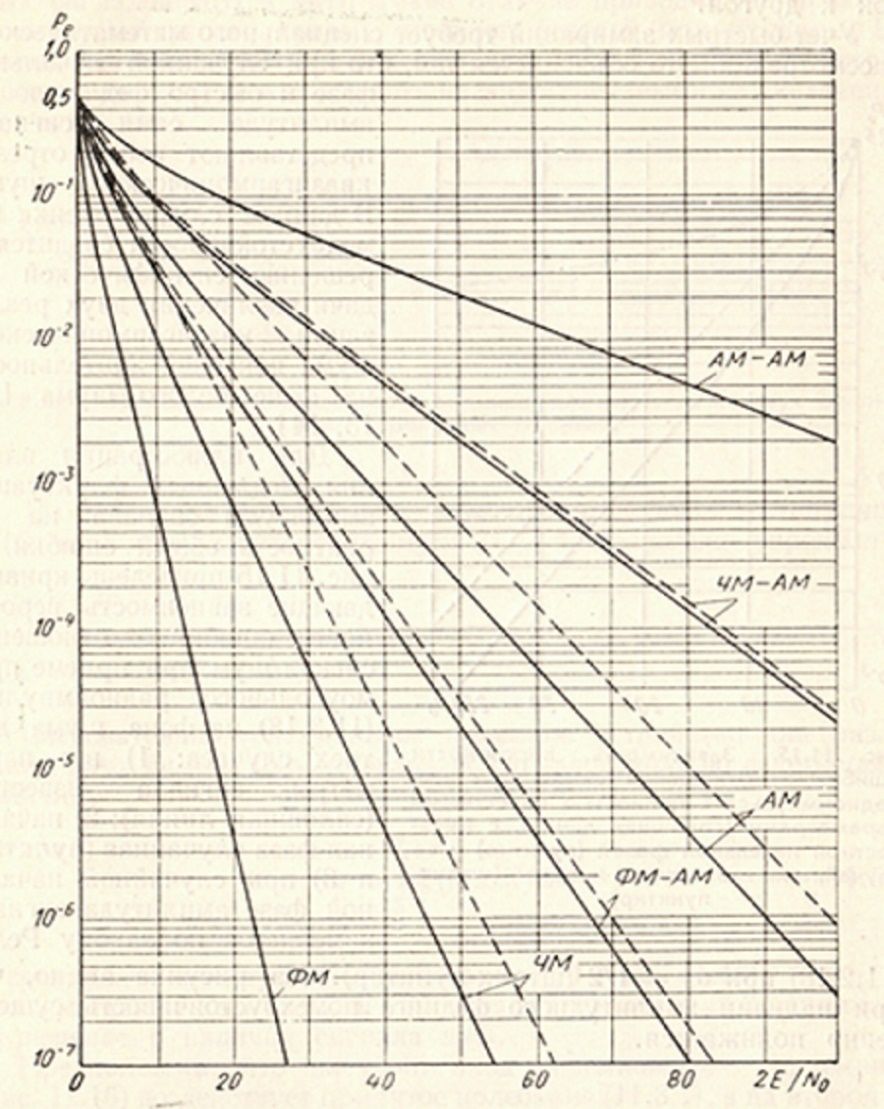
Рис. 1. Вероятность общей ошибки для различных систем радиотелеграфии при приёме на фоне шума детерминированных сигналов (сплошные линии) и сигналов со случайной начальной фазой (пунктир)
Поэтому рассмотрим варианты схемных решений, обеспечивающих способы фазовой автоподстройки частоты (ФАПЧ) для когерентной обработки с получением наименьшего значения вероятности ошибки как наиболее перспективных решений.
В случае использования ФКМ сигнала когерентный способ связи связан с применением схемы Костоса [2], рисунок 2.
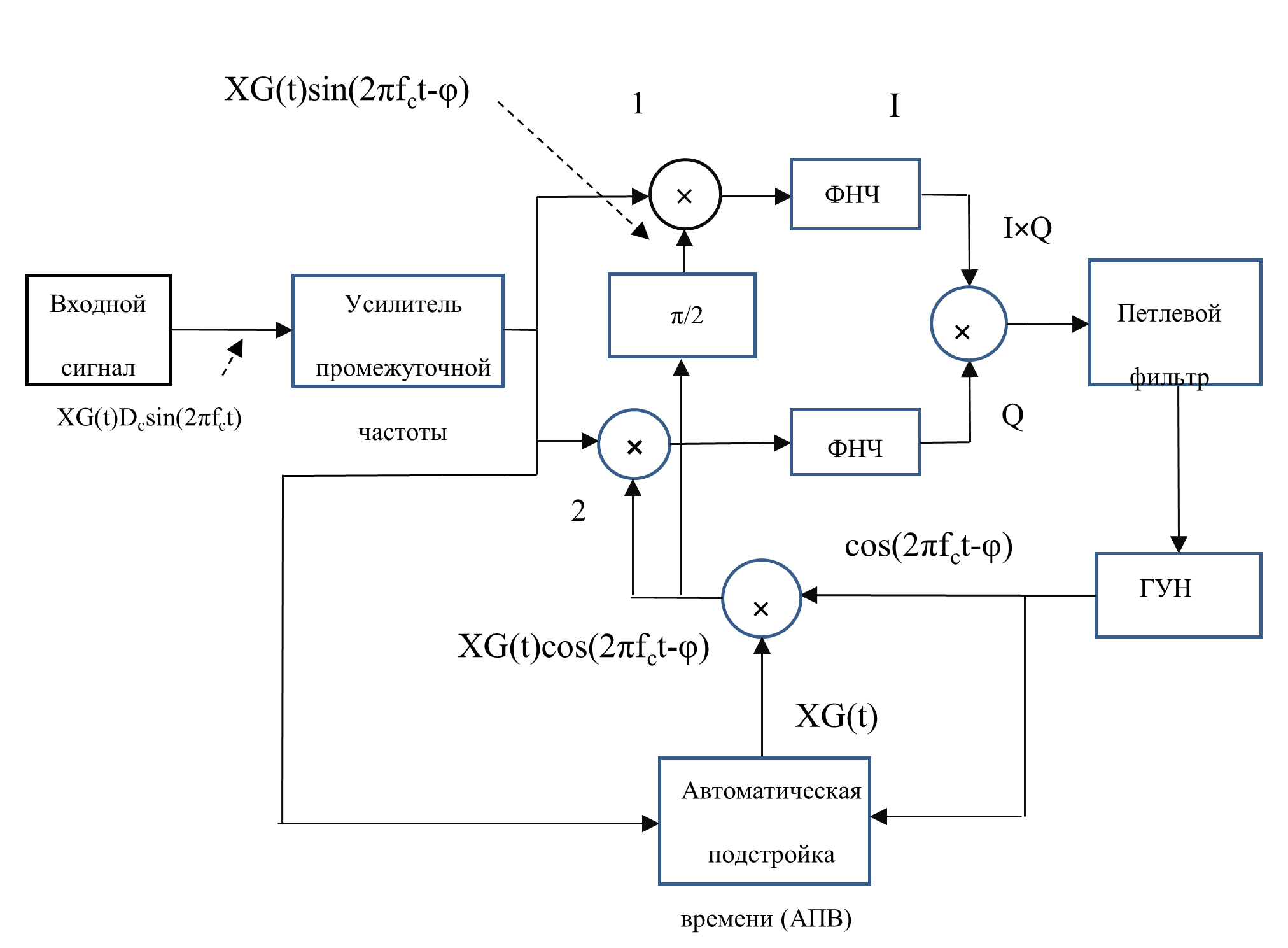
Рис. 2. Фазовая автоподстройка частоты по схеме Костоса
Здесь, с выхода усилителя промежуточной частоты (УПЧ) сигнал XG(t)Dc(t)sin(2πfct) поступает на фазовый дискриминатор, куда, с другой стороны, подаётся опорное напряжение XG(t)cos(2πfct-φ). Фаза несущей частоты элементарных радиоимпульсов опорного напряжения отличается от фазы импульсов сигнала на φ. Близость времени запаздывания сигнала и опорного напряжения поддерживается системой АПВ (автоматическая подстройка по времени прихода). Фазовый дискриминатор имеет два канала, отличающиеся тем, что их опорные напряжения сдвинуты по фазе на π/2, т.е. находятся в квадратуре. Каждый из каналов представляет собой умножитель сигнала на опорное напряжение. Вырабатываемые ими напряжения фильтруются в фильтрах нижних частот (ФНЧ) в результате чего образуются квадратурные составляющие (I и Q) сигнала рассогласования по фазе. В связи с тем, что исходный дальномерный сигнал XG(t)Dc(t)sin(2πfct) манипулирован по фазе сообщением Dc(t), составляющие сигнала ошибки I и Q изменяют свой знак в такт с информационными символами сообщения Dc(t). Для устранения этого влияния используется операция умножения I×Q, в результате чего сигнал ошибки освобождается от модуляции символами сообщения. Проанализируем правило формирования ошибки. Сигналы и квадратурные опорные напряжения на входе умножителей 1 и 2 рисунок 2 будем считать гармоническими Ucmsin(2πfct), Uоmsin(2πfct-φ), Uоmcos(2πfct-φ). Тогда на выходах умножителей получим:
 (1)
(1)
Ucmsin(2πfct)×Uomcos(2πfct-ϕ)=0,5×UcmUom[sin(ϕ)-sin(4πfct-ϕ)  (2)
(2)
На выходах ФНЧ:
 (3)
(3)
 (4)
(4)
Сигнал ошибки:
 (5)
(5)
Следующей проблемой является сам захват частоты (это особенно важно при срыве автосопровождения из-за помех и при перестройке несущей частоты) и, например, для ускорения захвата предполагается использовать путь изменения частоты ГУН при помощи внешнего линейно изменяющегося напряжения. Ещё один способ связан с тем, что вместо симметричной дискриминационной характеристики при перемножении значений каналов синуса и косинуса (Qps×Ips) в фазовом детекторе используется только знак фазы одного из каналов (Qps×sign(Ips)), что даёт вариант пилообразной дискриминационной характеристики, что исключает срыв при попадании на участок с противоположным наклоном дискриминационной характеристики, как показано на рисунке 3.
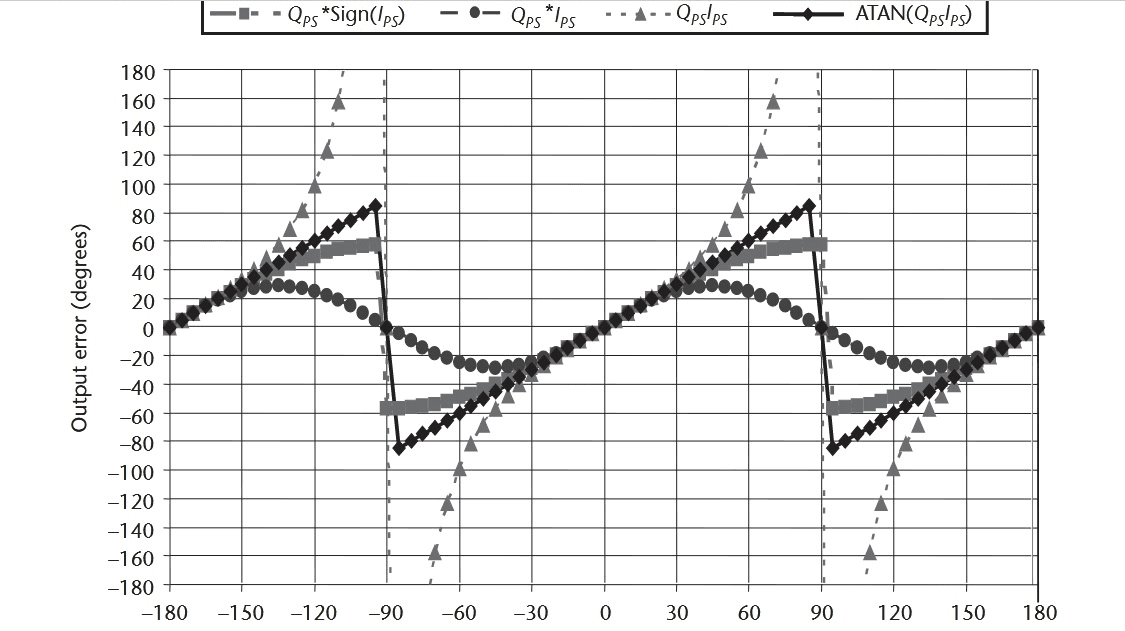
Рис. 3. Дискриминационные характеристики
Понятно, что схема Костоса, представленная на рисунке 2 в аналоговом исполнении, даже при наличии захвата частоты на основе дискриминационной характеристики вида Qps×sign(Ips) представленной на рисунке 3, не может обеспечить установку начальной фазы подстройки в 0 градусов, что желательно в случае отстройки по частоте от внешних помех и быстрого восстановления режима радиоуправления, так как генератор управляемый напряжением (ГУН) не контролирует установку начальной фазы. Необходимость этого связана и с тем, что установка начальной фазы определит возникновение сигнала рассогласования только с неточностью определения доплеровской частоты и при этом когерентное выделение ФКМ сигнала возможно сразу. Чтобы получить возможность устанавливать начальную фазу надо использовать цифровой синтезатор доплеровских частот. Однако использование только цифрового исполнения также не даст правильной точной установки фазы. С тем чтобы это показать приведём схему цифровой обработки используемой в системах GPS навигации [3], рисунок 4.

Рис. 4. Схема фазовой автоподстройки частоты на примере GPS приёмника
Здесь в качестве фильтров нижних частот применены интеграторы со сбросом и накоплением 1023 импульсов при импульсе в 1 Мбит/сек. Соответственно доплеровская частота, которая возможна для начального захвата будет определяться временем накопления, которое составляет 1 млсек (1 кГц). Понятно, что первоначальное значение частоты Доплера должно быть гораздо меньше 1 кГц, так как смена фазы от частоты Доплера приводит к разрушению накапливаемого кода. При этом точность установки первоначальной фазы будет также определяться временным интервалом между тактами повторения сброса, а это неопределённость 1 млсек. Как будет показано далее, скорость передачи сигнала радиоуправления должна быть не меньше 1 кбит/сек, а отсюда дискриминационная характеристика с учётом перемножения фаз по синусу и косинусу будет иметь период по частоте в четыре раза выше, то есть более 4 кГц. Соответственно выставить в ноль дискриминационной характеристики при накоплении кода в 1 млсек не представляется возможным. Рассмотрим конкретный вариант GPS приёмника по рисунку 5.

Рис. 5. Аналоговая часть приёмника GPS
Для детального рассмотрения приводим и цифровую реализацию с подключением к компьютеру рисунок 6.

Рис. 6. Соединение однобитового АЦП с компьютером
Здесь видно, что при такте в 10 МГц на 1 – битовый аналого-цифровой преобразователь (АЦП), смещение в область 2,5 МГц мы получаем на основе второй гармоники 22,5 МГц - 2×10 МГц=2,5 МГц. Понятно, что это ухудшает накопление сигнала по тактам в 2 раза, что даёт ухудшение соотношения сигнал/шум в 20.5=1,41 раз по сравнению с вариантом, если бы смещение осуществлялось на частоте в 20 МГц. Преимущество здесь в том, что с уменьшением тактовой частоты падают энергетические затраты. Однако, как будет показано в дальнейшем, в целях скрытной работы, время приёма сигнала на БПЛА от ретранслятора необходимо сокращать, что исключает узкополосный поиск сигнала средствами РТР, и в этом случае средняя мощность при повышенном такте сравняется с мощностью потребления при такте в 10 МГц.
Соответственно проведём расчёт энергетической линии при радиоуправлении на дальности близкой к 400 км исходя из следующих соображений. Пусть h1=10000 м – высота подъёма ретранслятора (РТ) в метрах над поверхностью Земли; h2=100 м – высота подъёма БПЛА в метрах над поверхностью Земли. Отсюда можно вычислить дальность прямой радиовидимости (L) между РТ и БПЛА по формуле:
L = 3,57 × (h10,5+h20,5) =3,57 × (100001/2+1001/2 )=392,7 км (6)
Теперь вычислим необходимые параметры радиолинии связи БПЛА с ретранслятором исходя из использования микросхемы в системах GPS, ГЛОНАСС и ориентируясь на полосу в 2,5 МГц. Считаем, что радиоуправление БПЛА ведётся с другого ЛА (ретранслятора), и пусть коэффициент усиления луча антенны АФАР ЛА состоящей из 4-х патч имеет коэффициент усиления 14,5 дБ, Gпрди=28,18 (прототип такой микрополосковой антенны приведён в [4]), при размерах антенны порядка 21 см × 21 см. Предположим, что в усилителях мощности в импульсе в каждом из 4-х патч мы имеем по 0,8 Вт (при скважности Q=2 получается 0,4 Вт, и это меньше средней мощности в мобильном устройстве Iridium в 0,65 Вт где используется импульсная мощность в 7 Вт). Общая мощность от усилителей питающих 4 патч составит Pпрди=3,2 Вт. Такой выбор мощности передатчика, особенно при работе в импульсном режиме и с большой скважностью, позволяет исключить наведение по источнику сигнала противорадиолокационных ракет. Считаем, что антенна БПЛА имеет Gпрми=Gаб=1.995 (3 дБ). Это выбор определяется коэффициентом направленного действия, который предполагается при использовании современных смартфонов в S-диапазоне, но это не значит, что нельзя через переключение в начальный момент вхождения в связь использовать ненаправленную антенну в -3 дБ. Выбираем отношение сигнал/шум q=27 (вероятность ошибки для ФКМ сигнала 10-7 по рисунку 1 [1], при шумовой температуре Тш=600 К, соответственно в формуле k – постоянная Больцмана, частота fи =1,57542 ГГц (длина волны λи=0,19м). Отсюда имеем желаемую полосу пропускания:
 (7)
(7)
Это означает, что радиоуправление на такой дальности в 400 км при прямой видимости при ФКМ сигнале возможно даже без накопления. Однако, как видно из формулы (7) при накоплении сигнала при 1023 импульсах с повышением отношения сигнал/шум в (1023)1/2=32 раза, сигнал радиоуправления можно снизить за счёт уменьшения мощности передатчика 3,2 Вт/32=0,1 Вт до уровня шума. При этом превышение над порогом будет обеспечиваться через накопление кода. Если использовать помехозащищённый код при скорости кода в 10 Мбит/сек и накоплением 10000 импульсов, то в этом случае мощность передатчика может быть уменьшена до 0,032 Вт, то есть в 100 раз. Это означает обеспечение скрытности сигнала радиоуправления за счёт расширения спектра. Отметим, что если бы использовалась полоса пропускания в 2,5 кГц для непрерывного сигнала длительностью в 1 млсек, то это дало бы повышение отношения сигнал/шум в 1000 раз, но при этом обнаружение и выделение такого сигнала для радиоэлектронной разведки не представляет труда. Поэтому очевидным решением для обеспечения скрытности сигнала радиоуправления является уменьшение длительности символа кода с повышением при этом скорости передачи и накоплением большего количества импульсов. Если предположить, что на каждое из 3-х перпендикулярных направлений движения отводится по 14 бит, то в итоге в секунду потребуется 42 бита.
Казалось бы, можно сделать вывод о применимости обработки микросхемы GPS (ГЛОНАСС) для радиоуправления, где скорость передачи информации составляет из-за бинарного квантования 50 бит/сек. При этом, такая же скорость передачи информации в GPS (ГЛОНАСС) сохраняется и при режиме повышенной помехозащищённости при скорости передачи кода в 10 Мбит/сек. Однако в реальных условиях применения радиопомех будут срывы сопровождения, так как при цифровой обработке используется бинарный –однобитовый сигнал (это как раз и приводит к тому, что скорость передачи информации 50 бит/сек, а не 1 кбит/сек) и в этом случае более сильный помеховый сигнал «обрезает» более слабый сигнал радиоуправления. Это собственно и применяется сейчас с учётом известных частот коммерческих микросхем GPS (ГЛОНАСС). Здесь успех в управлении БПЛА будет определяться скоростью перестройки на другую частоту и скоростью передачи информации управления с накоплением кода как можно в более короткое время. Так при высоте полёта БПЛА в 100 метров (скрытое перемещение по рельефу местности) и скорости в 200 км/час, за 1 секунду отсутствия сигнала управления БПЛА может уйти с траектории на 56 метров и сигнал от радиоуправления не успеет выправить положение. Отсюда следует вывод о необходимости передачи сигнала управления не менее, чем через 0,1 секунду. Это означает, что требуется не 50 бит/сек, а 500 бит/сек. Если использовать общий канал на приём и передачу при радиоуправлении, с учётом того, что обратно на ретранслятор должна поступать информация о местоположении БПЛА, то при скважности Q=2 нам потребуется скорость передачи информации как минимум в 1 кбит/сек. Напомним ещё раз, что при использовании для передачи сигнала радиоуправления непрерывного узкополосного сигнала без ФКМ, с полосой пропускания порядка 2,5 кГц, мы имеем выигрыш в отношении сигнал/шум и можем получить передачу информации выше 1 кбит/сек, однако такой сигнал не представляет трудностей для выделения с помощью радиоэлектронной разведки в течение нескольких секунд и постановки помех на несущей частоте сигналу радиоуправления. То есть, метод использования узкополосного непрерывного сигнала исключает преимущество скрытности сигнала за счёт использования ФКМ – кода, при котором скрытность растёт при уменьшении длительности символа кода и увеличением накопления. Из исключения варианта узкополосного сигнала и ФКМ - сигнала с однобитовым АЦП, на основе обработки предложенной в GPS (ГЛОНАСС), следует необходимость использования многоразрядного аналого-цифрового преобразователя (АЦП), чтобы получить аналогию со схемой Костоса с увеличением скорости передачи информации. Отметим, что даже если, по варианту GPS (ГЛОНАСС), будет использоваться помехозащищённый код в 10000 импульсов при символьной скорости кода в 10 Мбит/сек, то срыв сопровождения в течение 1 секунды с уходом в 56 метров даст также срыв и по коду накопления, так как импульс символа равен 30 метрам распространения в пространстве. Далее отметим, что, для исключения влияния радиопомех, эффективным способом является расширение диапазона несущих частот сигнала радиоуправления от 2 ГГц до 10 ГГц, с расширением полосы пропускания от 200 МГц до 500 МГц и более с перестройкой несущей частоты, что эквивалентно частотной модуляции. Это заставляет противника «размазывать» шумовой сигнал по всему этому диапазону с уменьшением мощности помехи в заданном диапазоне частот сигнала радиоуправления. При этом на входе приёмника сигнала управления может устанавливаться перестраиваемый радио фильтр с полосой частот порядка 10-50 МГц, что исключает перегрузку входного тракта импульсной радиопомехой. Однако расширение диапазона частот связано с переходом на более высокие несущие частоты, где уже частота сдвига по Доплеру может достигать нескольких килогерц. Вычислим доплеровскую частоту Fд при скорости БПЛА в 200 км/час (Vбпла=55,56 м/сек) и несущей частоте f=10 ГГц по формуле:
 (8)
(8)
Так как длительность кода ФКМ сигнала при GPS (ГЛОНАСС) составляет 1 млсек, что эквивалентно 1 кГц, то подстройка по частоте Доплера может происходить в районе ±500 Гц и менее, так как иначе изменение фазы от частоты Доплера приводит к разрушению накапливаемого кода. Отсюда следует вывод, что длительность кода информации радиоуправления по варианту первоначальной подстройки по методу GPS вначале по коду, а потом по частоте Доплера не должна превышать 300 мксек (3,4 кГц). Это сравнимо со скоростью передачи в режиме телефонной связи (ТЛФ) в спутниках Iridium.
Таким образом, использование обработки сигнала для канала радиоуправления по методу GPS (ГЛОНАСС) в коммерческом исполнении микросхем при обеспечении скрытности сигнала радиоуправления имеет следующие недостатки:
- Низкая скорость передачи информации радиоуправления, так как требуется не 50 бит/сек, а скорость передачи информации от нескольких кГц и выше.
- Неоптимальная обработка входного сигнала из-за бинарного квантования с возможностью подавления сигнала из-за выхода в область ограничения по динамическому диапазону амплитуды. Кроме того мы имеем ухудшение отношения сигнал/шум из-за использования второй гармоники для смещения частоты в однобитовом АЦП из-за сокращения количества выборок для усреднения в 2 раза.
- Скорость первоначальной подстройки по несущей частоте в случае смены частот для отстройки от радиопомех также низкая и будет составлять секунды. Противник успеет за это время выделить эту новую несущую частоту и организовать на ней помеху.
- Скорость передачи информации не может быть повышена за счёт сокращения длительности символа кода накопления при том же количестве накапливаемых импульсов (здесь как при 1 Мбит/сек, так и при 10 Мбит/сек мы имеем 50 бит/сек и это связано с тем, что перемножение каналов осуществляется после накопления по рисунку 4). Иными словами, при необходимости превышения над радиопомехой, нельзя сократить время на передачу сигнала радиоуправления с повышением при этом импульсной мощности.
- Отсутствует возможность использования независимой первоначальной быстрой подстройки по частоте Доплера отдельно от выделения по коду в течение, например, 100 мксек (10 кГц), что позволяет менять несущую частоту каждые 200 мксек (5 кГц).
- Узкоспециализированный сигнал GPS исключает возможность многофункционального использования и унификации, что снижает возможности по выполнению боевой задачи и разведки.
Проведённый анализ показывает, что использование микросхемы GPS (ГЛОНАСС) не обеспечит в условиях радиопомех эффективной защиты. А это означает, что надо создавать такой алгоритм обработки радиосигнала, который бы был лишён указанных недостатков. Соответственно первым очевидным решением является необходимость переходить на многоразрядный АЦП (например, ad9254 на 14 бит), что позволяет увеличить скорость потока информации с 50 бит/сек до 1 кбит/сек при длительности кода в 1 млсек. Кроме того необходимо использовать тактовый сигнал оцифровки который в 8 раз был бы выше, чем значение промежуточной частоты для выделения сигнала как по синусу, так и по косинусу с учётом возможности подстройки по частоте Доплера внутри ПЛИС (например, A3PE3000L). Пример схемного решения показан на рисунке 7.
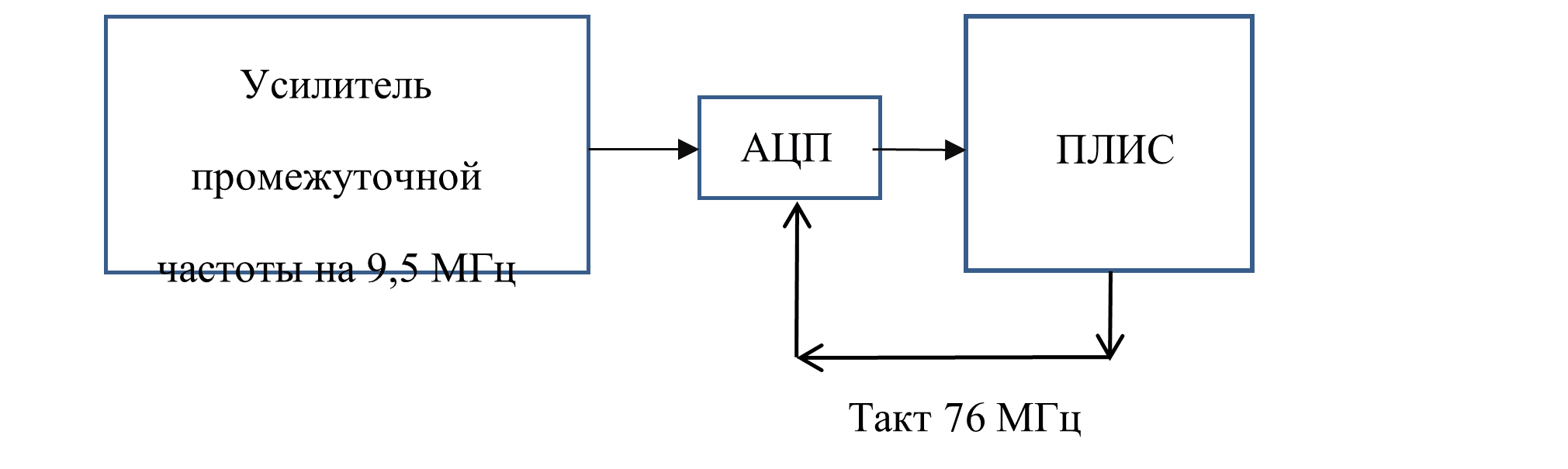
Рис. 7. Вариант выделения ФКМ сигнала с обработкой в ПЛИС полученный в АНО «НТИЦ «ТЕХКОМ»
Необходимо отметить, что внутри микросхемы GPS используется тактовая частота генератора Fs=200 МГц для формирования смещения частоты Доплера на частоте 10 МГц по рисунку 4 и 8.
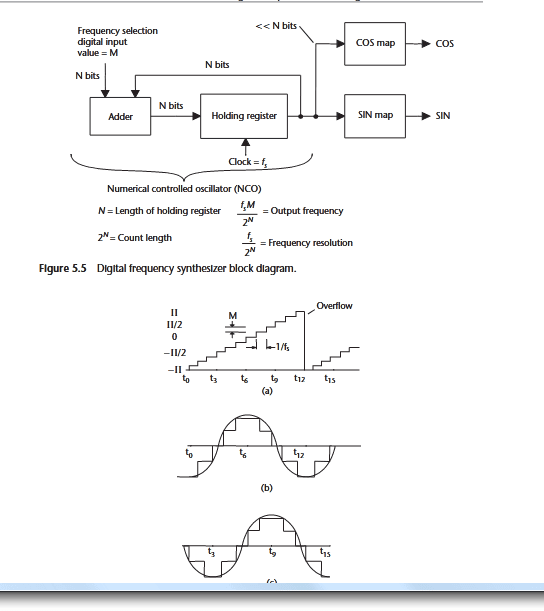
Рис. 8. Принцип формирования сигнала частоты Доплера в системе GPS (ГЛОНАСС)
Понятно, что вариант схемы GPS по рисунку 4 принципиально не позволяет получить отдельную подстройку по частоте Доплера и коду, так как в качестве фильтра используются накопители по коду со сбросом и освобождение от фазы ФКМ сигнала происходит в дискриминаторе после интеграторов со сбросом. То есть, не предусмотрен программный режим освобождения от ФКМ сигнала для первоначальной быстрой подстройки по частоте Доплера, с разделением каналов по коду и по частоте Доплера. Кроме того, нет режима первоначального определения частоты для выставления параметров пропорционально-интегрирующего звена после дискриминатора, и нет запуска начала подстройки в момент прохождения через ноль сигнала дискриминационной характеристики по рисунку 3 с крутизной обеспечивающей устойчивый режим слежения и максимальным уровнем управляющего сигнала исключающего срыв сопровождения при помехах. Такие режимы необходимы для быстрой подстройки частоты в течение 100 мксек, что позволяет менять несущую частоту практически через 200 мксек. Одновременно программа, вшитая в ПЛИС по рисунку 7, использует сочетание фильтрации с накоплением и сбросом, и фильтрацию в непрерывном режиме при 76 цифровых звеньях, что позволяет менять полосу пропускания в достаточно больших пределах с изменением длительности кода накопления. При этом в нашем варианте мы используем внутренний генератор на 152 МГц и возможна передача информации до 3 Мбит/сек. Соответственно было проведено математическое моделирование на ПЛИС по схеме рисунка 7, результаты которого приведены на рисунке 9.
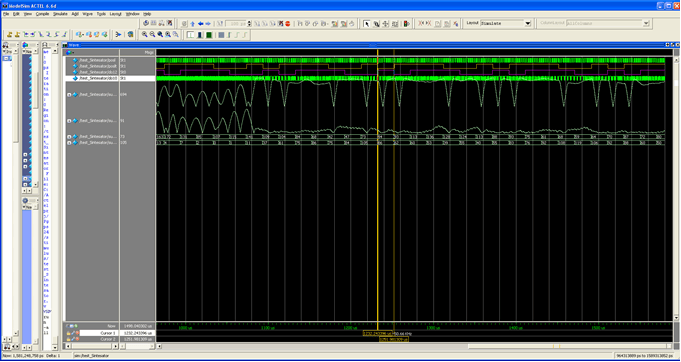
Рис. 9. Диаграмма математической модели режима накопления подобного GPS при доплеровской частоте 32 кГц
На рисунке 9 приведены результаты моделирования на ПЛИС уже с конкретным размещением логических элементов для варианта с балансным модулятором ФАПЧ, выполненной по схеме Костоса внутри ПЛИС, с подстройкой по частоте Доплера равной 32 кГц, и с передачей информации 53,763 кбит/сек на основе нашей программы. Это аналогично скорости передачи потока информации в системе связи Iridium при одновременном обслуживании большого числа пользователей, но с преимуществом за счёт наличия кода как в Globalstar, что даёт многофункциональное использование. Необходимо напомнить, что эквивалентное смещение частоты в область 32 кГц обеспечивает начальное определение частоты в течение 50 мксек, что говорит о необходимости достижения компромиссного решения, когда с одной стороны для повышения чувствительности необходимо уменьшать полосу пропускания, а с другой стороны желательно обеспечить быструю подстройку за счёт расширения полосы пропускания. При этом было применено кодирование при длительности кода в 62 импульса длительностью символа в 0.3 мксек. Желтый и фиолетовый графики диаграммы отражают входной и выходной коды информации. Белые графики отражают результат цифровой фильтрации в квадратурных каналах. Собственно в этом случае один ретранслятор (РТ) может управлять сразу до 5-10 БПЛА при использовании формата связи аналогичному системе Iridium по рисунку 10.

Рис. 10. Формат МДВР – кадра КА Iridium (UL1-UL4 – восходящие каналы, DL1-D4 – нисходящие каналы)
Здесь используется временное разделение на 4 абонентских канала с преамбулой (Simplex) 20,32 млсек, которую мы заменяем на ещё 1 канал связи, так как у нас время подстройки не превышает 100 мксек, с временем на приём и передачу для каждого БПЛА по 8,28 млсек. Это соответствует передаче 414 бит за 0,09 секунды, что составляет поток 4,6 кбит/сек на каждый из 5 БПЛА. При использовании временного разделения на 10 каналов поток информации для радиоуправления на каждый БПЛА составит 2,3 кбит/сек. Результаты математического моделирования были подтверждены в экспериментальной установке на практике по рисункам 11 и 12.

Рис. 11. Практический результат выделения ФКМ радиосигнала с доплеровской частотой 105 кГц при обработке радиосигнала полностью внутри ПЛИС
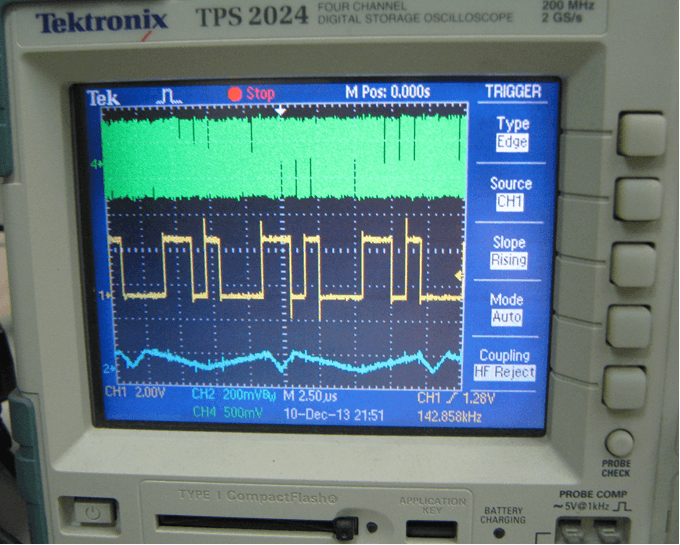
Рис. 12. Практический результат выделения ФКМ радиосигнала с доплеровской частотой на 15 кГц с указанием синим цветом характеристики цифрового фильтра по каналу синуса в виде дискриминационной характеристики по модулю при обработке радиосигнала полностью внутри ПЛИС
Понятно, что данный вариант при схемном решении по рисунку 7 не имеет отличий от схемы GPS, и за счёт программы обеспечивает исключение недостатков микросхемы GPS при скорости передачи кода в 1 Мбит/сек. Однако, использование 3 Мбит/сек не обеспечивает помехоустойчивый режим в 10 Мбит/сек, так как промежуточная частота в 9,5 МГц даёт возможность использовать импульсы только не более 3 Мбит/сек. Таким образом, возникла задача получить помехозащищённый режим со скоростью передачи кода от 10 до 50 Мбит/сек с сохранением преимуществ над режимом GPS полученных по схеме и программе используемой по рисунку 7. В соответствии с этим была предложена функциональная схема со сбросом сигнала на нулевую промежуточную частоту по рисунку 13.

Рис. 13. Функциональное исполнение для реализации способа быстрой цифровой фазовой автоподстройки частоты для оптимальной когерентной обработки радиосигналов
Основу представленной схемы составляет обработка сигнала в программируемой логической интегральной схеме (ПЛИС). Вся идея когерентной цифровой обработки заложена в дискретизации сигнала по синусу и косинусу с помощью аналого-цифровых преобразователей (АЦП1 и АЦП2), сигналы с выхода которых поступают на ПЛИС. В ПЛИС по программе осуществляется выделение информационного сигнала, и формируются сигналы по сдвигу по доплеровской частоте, которые поступают на цифро-аналоговый преобразователь (ЦАП, например, ad9761 с передачей 40 Мбит/сек), а с него уже аналоговые сигналы по синусу и косинусу поступают на аналоговый модулятор (ad8345 с полосой модуляции в 80 МГц и частотой от 140 МГц до 1 ГГц). На второй вход аналогового балансного модулятора поступает сигнал от синтезатора частоты (adf4360-7 с частотой от 350 МГц до 1,8 ГГц или от 175 МГц до 900 МГц). Сигнал на промежуточной частоте с аналогового модулятора поступает на первый вход аналогового балансного демодулятора (ad8348 с рабочими частотами от 50 МГц до 1 ГГц и полосой пропускания 60 МГц), на второй вход которого поступает сигнал от пользователя через усилитель промежуточной частоты (УПЧ), и тем самым цепь обратной связи ФАПЧ замыкается. На рисунке 14 отображена блок-схема программы в ПЛИС.
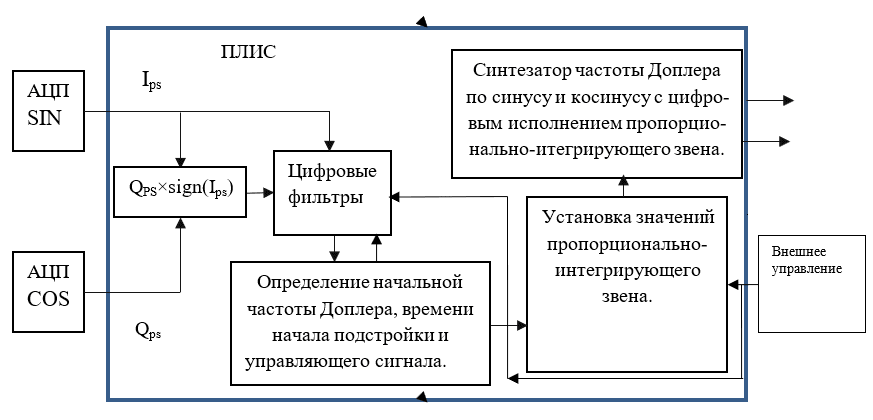
Рис. 14. Блок-схема цифровой обработки в ПЛИС
Основной вопрос здесь связан с выбором частоты дискретизации в АЦП и ПЛИС с получением максимального потока информации за короткое время для обеспечения помехозащищённости. Соответственно, при высоком потоке информации требуется высокая тактовая частота, по теореме Котельникова, когда на один бит информации должно приходиться как минимум два такта. Но, если выбрать значение частоты достаточно высокой, то возрастает энергетическое потребление в квадрате в зависимости от частоты. Поэтому выбор частоты дискретизации должен быть оптимальным и удовлетворять потоку передаваемой и принимаемой информации в соответствии с требованиями радиоуправления и допустимой чувствительности. Если учитывать многофункциональное использование микросхемы с унификацией, то исходя из современных требований скорость передачи, например, для Starlink составляет от 50 до 150 Мбит/сек [5]. Собственно накопление кода будет превосходить накопление в помехозащищённом режиме GPS в 5 - 15 раз. И это можно использовать для сокращения времени передачи, отводимое на радиоуправление с использованием повышения мощности в импульсном режиме РТ при сохранении средней мощности или для увеличения количества обслуживаемых одновременно БПЛА. Иными словами цели улучшения помехозащищённости для радиоуправления и для передачи сигнала в системе связи Starlink за счёт сокращения длительности символа кода или информации совпадают. Это обеспечивает унификацию и экономически выгодно.
Так как, с учётом теоремы Котельникова на каждый бит информации должно приходиться как минимум два тактовых импульса по дискретизации, то это означает, что частота дискретизации должна лежать в пределах от 100 МГц до 300 МГц. Соответственно обработка сигнала на тактовой частоте 300 МГц, в случае многоразрядного АЦП, что необходимо для исключения подавления слабого сигнала сильным сигналом, представляет существенные трудности и не обеспечивает цифровую фильтрацию в ПЛИС как это предлагается по рисунку 7. Кроме того, обработка сигнала в ПЛИС на частоте 300 МГц приводит к проблеме синхронизации и выделяемой памяти для логических элементов, так как чем выше тактовая частота, тем больше требуется цифровых звеньев из логических элементов, чтобы добиться той же самой полосы пропускания как в случае меньшей тактовой частоты. Конечно, проблему потока информации в 150 Мбит/сек можно решить, используя излучение сразу по трём параллельным каналам, разнесённых на полосу частот, но многочастотный режим излучения приводит к необходимости использования в усилителях мощности режима класса «А», то есть линейного режима с уменьшением коэффициента полезного действия (к.п.д.) до 30-48%, поэтому более выгодно использовать одночастотный режим класса «В», с к.п.д. до 78% [6], что снижает энергопотребление в 1,625 раз. При этом для достижения необходимого потока информации в 150 Мбит/сек лучше использовать режим QAM, который при полосе в 50 МГц обеспечивает в 3 раза больший поток информации, а значит и накопления, за счёт применения фазовой манипуляции на 90о (QPSK) в сочетании с амплитудной модуляцией (АМ). Это практически приводит к исключению выделения такого псевдошумового сигнала радиоуправления радиоэлектронной разведкой.
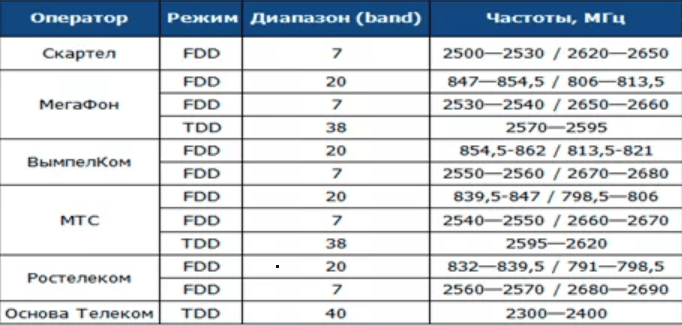
Однако, в теореме Котельникова не учитывается то, что тактовый импульс имеет конечные размеры и соответственно возникает вариант, когда фронт бита информации находится в момент наличия тактового импульса. Это приводит к неоднозначности по возможности выделения бита информации из-за искажений. Чтобы решить указанную проблему, необходимо увеличить количество тактовых импульсов дискретизации в бите информации с двух до 3 и более. Но при этом должна возрасти и частота дискретизации, и при потоке в 150 Мбит/сек она будет определяться уже величиной в 450 МГц. Это приводит к ещё более значительному росту энергетических потерь, поэтому необходимо искать компромиссное решение. Для математического моделирования, опираясь на разрешённые максимальные полосы государственным комитетом по радиочастотам (ГКРЧ), мы выберем по таблице, допустимую полосу в 38 МГц с учётом использования ЦАП AD9761 и с получением потока информации до 40 Мбит/сек.
Таблица
Выделенный диапазон частот коммерческим фирмам
Отметим, что переход на скорость передачи в 150 Мбит/сек (у нас это в режиме QAM) как в Starlink с выполнением в программном виде для обработки радиосигнала через математическое моделирование не представляет трудности, если код ФКМ подавать не через ЦАП (AD9761), а через внешнее управление. То есть, в этом случае нельзя сформировать смещение по частоте одновременно с кодом информации, что может потребоваться при несущих частотах больше 10 ГГц. Приём потока в 50 Мбит/сек с обработкой сигнала в ПЛИС (A3PE3000L) возможен при оптимальной расстановке логических элементов в ПЛИС с учётом задержек. При этом при приёме сигнала радиоуправления в АЦП и ПЛИС при обработке сигнала в 50 Мбит/сек возрастут энергетические потери. Напомним, что тактовая частота в микросхеме GPS составляет 200 МГц, поэтому использование в ПЛИС тактовой частоты в 150 МГц вполне допустимо. Соответственно плюсом здесь будет возрастание точности начального определения сдвига по частоте и соответственно решается вопрос многофункциональности. Собственно, в части унификации такой блок радиоуправления по рисунку 13 можно также использовать для передачи изображения от БПЛА на ретранслятор за счёт того, что у нас в ПЛИС используется предварительная цифровая фильтрация, дающая полосу в 6,25 МГц при такте дискретизации в 150 МГц. Иными словами от РТ к БПЛА может приходить сигнал радиоуправления, а обратно от БПЛА к РТ поступать необходимое оптическое изображение. Это становится возможным за счёт сокращения времени отводимого для радиоуправления за счёт повышения скорости передачи информации с 50 бит/сек по схеме GPS (ГЛОНАСС) до 50 Мбит/сек по схеме по рисунку 13. Однако сокращение длительности символа с соблюдением нахождения в символе до трёх тактов от частоты дискретизации, при разбиении в дальнейшем на три параллельных канала обработки для сокращения энергетических потерь, влияет на биты информации в каждом из трёх каналов как это видно на рисунке 15.

Рис. 15. Результаты математического моделирования с целью выявления ошибки за счёт дискретизации
Здесь тактовая частота (GLAA) порядка 114 МГц, с балансного демодулятора поступает сигнал sv17 на АЦП с модуляцией по ФКМ информации posl. С АЦП сигнал sv17 считывается с тактом в 114 МГц и поступает в ПЛИС в виде сигнала sin0. Далее сигнал sin0 для получения синхронного такта считывания побитно информации в 38 Мбит/сек разбивается на три канала с тактами по 38 МГц sin1, sin2, sin3 со сдвигом между каналами на такт в 114 МГц. Такое деление на три канала позволяет снизить энергетические потери, которые были бы при обработке на частоте в 114 МГц, упростить соблюдение задержек между логическими элементами и уменьшить количество звеньев для цифровой фильтрации. Кроме того, разделение по трём каналам с тактами в 38 МГц и сдвигом по времени между каналами на такт в 114 МГц позволяет исключить ошибки от дискретизации по рисунку 15. Действительно, из рисунка 15 мы видим, что искажение информации в сигнале sin2 связано с дискретизацией. Поэтому решение о достоверности бита информации должно приниматься на основе фазы по трём битам, где истина будет определяться одинаковой фазой хотя бы по двум тактам. Но это не все проблемы связанные с сокращением количества тактов дискретизации на бит информации для увеличения потока информации. Понятно, что выборки по тактам дискретизации используются в дальнейшем для определения сдвига по частоте Доплера, и искажённые выборки дают ошибки. Более наглядно ошибка дискретизации с учётом сдвига по частоте Доплера видна на рисунках 16,17.
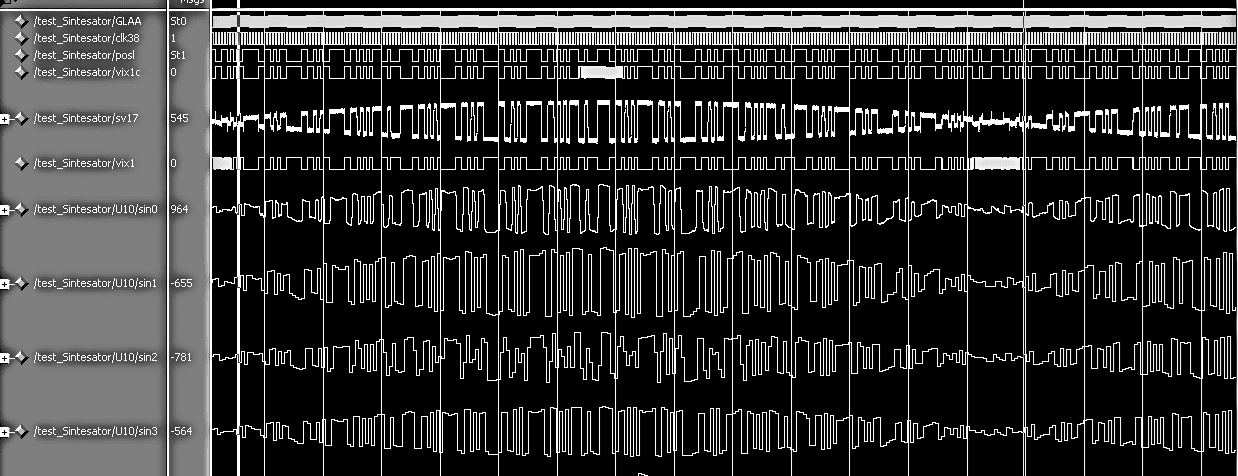
Рис. 16. Ошибки из-за дискретизации с учётом сдвига по частоте Доплера после АЦП до фильтрации

Рис. 17. Влияние ошибок, связанных с дискретизацией сигнала на подстройку ФАПЧ при предварительной фильтрации
Таким образом, мы видим, что ошибка дискретизации влияет не только на ошибки по выделению информации, но здесь есть также искажения, которые влияют на определение частоты Доплера, а также на дальнейшую когерентную подстройку. Данное математическое моделирование показано при высоком отношении сигнал/шум, но и даже в этом случае есть опасность срыва из режима сопровождения, в силу того, что сигнал по каналу выделения информации окажется ниже сигнала слежения по дискриминационной характеристике, что было замечено на практике и давало выход из полосы захвата.
Понятно, что самый простой метод исключения ошибок от дискретизации это увеличение количества тактов приходящихся на один бит информации, однако это связано с повышением тактовой частоты для поддержания такого же потока информации, что требует больших энергетических затрат. Поэтому при трёх тактах на бит информации предлагается способ исключения ошибок дискретизации на одной выборке за счёт достоверной информации от двух других тактов, содержащихся в бите информации при выделении частоты Доплера. Данный подход вполне приемлем, так как определяемая частота дискриминационной характеристики для быстрой фазовой подстройки в течение 100 мксек при частоте Доплера в 25 кГц не превышает 100 кГц, в то время как выделяемый поток информации имеет полосу в 38 МГц и более. Это означает, что отношение сигнал/шум должно соответствовать приёму сигнала в полосе информации, а в полосе частот Доплера мы будем иметь отношение сигнал/шум в 380 раз выше. По формуле (7) мы для ретранслятора (РТ) предполагали мощность передатчика в 3,2 Вт и коэффициент усиления антенны РТ при 4-х патч в 14,5 дБ (28,18). При этом мы получили, что возможен приём сигнала в полосе 2,5 МГц на дальности в 400 км с вероятностью ошибки в 10-7. Чтобы передавать сигнал радиоуправления в полосе 38 МГц в режиме QAM (114 Мбит/сек) нам необходимо поднять энергетический потенциал РТ в 45 раз. Это можно сделать за счёт увеличения площади приёмной антенны РТ в 4 раза (6 дБ), что даст коэффициент усиления антенны в 20,5 дБ. При этом мы будем иметь 16 патч вместо 4-х патч с площадью антенны 42 см × 42 см. Соответственно в 4 раза увеличится и количество усилителей мощности. И если общая выходная мощность от усилителей ретранслятора составит 46 Вт (16 усилителей мощности по 2,8 Вт), то мы будем иметь необходимый энергетический потенциал для полосы в 38 МГц. Отсюда, если мы можем обеспечить выделение сигнала в полосе 38 МГц с вероятностью 10-7, то достоверность информации по тактам при определении сдвига по частоте Доплера даже в полосе 2,5 МГц будет практически равна единице. Следует отметить, что например, усилитель мощности AP561-F в полосе от 0,7 ГГц до 2,9 ГГц может обеспечить до 8 Вт. Это даст необходимый энергетический потенциал и для полосы в 50 МГц. Особенно это важно для использования схемы по рисунку 13 в многофункциональном режиме, например, для БПЛА важно знать высоту при полёте на малых высотах. Импульс в 0,02 мксек (50 МГц) обеспечивает разрешающую способность в 3 метра, но с учётом амплитуды по тактам дискретизации в 150 МГц при разделении на 3 потока по тактам в 50 МГц и сдвигом между 3-мя потоками на такт в 150 МГц при накоплении можно получить точность в 1 м. Кроме того при массированном применении БПЛА (а это наиболее предпочтительный вариант при прорыве ПВО противника) сигнал радиоуправления может передаваться на ретранслятор из БПЛА последующих порядков, и если исходить из мощности в 8 Вт и коэффициенте усиления антенн БПЛА в 3 дБ, то передача сигнала радиоуправления при тех же параметрах полосы по формуле (7) может осуществляться на дальности в 168 км. Можно также отметить, что от передних БПЛА, по последующей цепочке из БПЛА, может передаваться на ретранслятор и картинка оптического изображения или изображение в другом диапазоне частот. Данный диапазон частот усилителя мощности AP561-F также предпочтителен и для других случаев многофункционального использования, что показано в [7].
Как мы отмечали ранее [3] для обеспечения быстрой ФАПЧ необходимо иметь точное определение частоты Доплера, что позволяет выставить время подстройки в ноль дискриминационной характеристики с учётом выявленного значения частоты, то есть отношение сигнал/шум должно быть выше, чем это необходимо для выделения потока информации для радиоуправления. С этой целью необходимо снизить влияние шумов, для чего используется предварительная фильтрация по каждому из трёх тактов. Далее используется сравнение амплитуд сигналов по тактам после предварительной фильтрации. Если исходить из выделения потока информации в 38 Мбит/сек, а также при использовании кодовых последовательностей с такой скоростью, то полосу пропускания при предварительной фильтрации желательно иметь в 8-16 раз ниже, и это обеспечит достоверность исключения тактовых выборок с ошибками. Напомним, что в случае использования большего количества тактовых сигналов на бит информации как в системе GPS, например, когда в бите информации находится 10 и более тактов, с понижением скорости передачи информации до 1 Мбит/сек и менее, влияние дискретизации на определение сдвига по частоте Доплера практически сводится к нулю. Однако, в этом случае ухудшается помехозащищённость, для чего в GPS используется сигнал в 10 Мбит/сек. С учётом сказанного, для исключения влияния дискретизации и снижения влияния шумов на определение сдвига по частоте Доплера, мы используем следующие действия [8]:
- Частота дискретизации выборок выбирается выше в 3 раза по сравнению со скоростью потока информации.
- Входной поток с тактом дискретизации, например, от 100 до 150 МГц, разбивается на три потока с тактом выборок меньше, чем частота дискретизации в АЦП в 3 раза для выделения такта с ошибкой от дискретизации, и сдвигом между потоками на частоту дискретизации.
- Для исключения влияния потока информации на определение сдвига по частоте Доплера используется её удаление за счёт логической операции «XOR» на основе фаз сигналов по каналу косинуса и синуса (на языке программирования Verilog данная операция обозначена «фаза сигнала синуса «^» фаза сигнала косинуса).
- Используется предварительная цифровая фильтрация на основе 8-10 тактов для улучшения отношения сигнал/шум перед операцией сравнения сигналов по всем трём параллельным каналам по синусу и косинусу. Такая фильтрация позволяет обеспечивать приём аналоговых телевизионных изображений, а также обеспечивает подстройку по частоте Доплера для несущих частот в 20 ГГц и более.
- Далее проводится сравнение сигналов по трём параллельным каналам как по синусу, так и по косинусу в отдельности и по амплитуде, и по фазе, и осуществляется выбор того сигнала из трёх, который обеспечивает наименьшее значение по амплитуде в данный момент времени с учётом фазы.
- Исключаем дребезг по фазе, используя накопление изменения фазы в течение несколько тактов с постоянством фазы, аналогично [9].
- Проводим начальное определение частоты на основе подсчёта количества тактов в течение положительного и отрицательного полупериода дискриминационной характеристики.
- Определяем момент включения петли обратной связи ФАПЧ по моментам перескока фаз дискриминационной характеристики во время подсчёта тактов с учётом задержек на фильтрацию.
- Формируем сужение полосы фильтров исходя из снижения колебаний по амплитуде в канале наличия дискриминационной характеристики с целью обеспечения улучшения отношения сигнал/шум.
Результаты такого выбора по пунктам 1-5 приведены на рисунках 18, 19.

Рис. 18. Результат математического моделирования при удалении ошибки дискретизации по каналу синуса (sin_s2)

Рис. 19. Результат математического моделирования при удалении ошибки дискретизации по каналу косинуса (cos_s3)
Из рисунка 19 видно, что в районе нуля по дискриминационной характеристике наблюдается «дребезг» по фазе, что исключается в нашем случае по программе, представленной на рисунке 20.
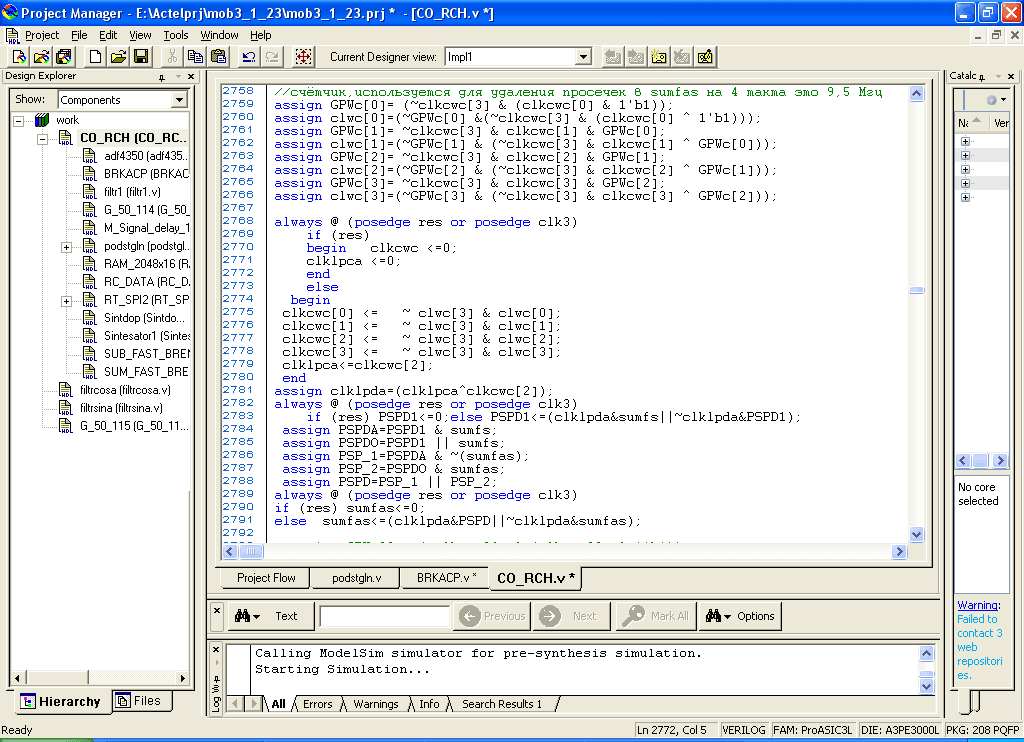
Рис. 20. Программа на языке Verilоg для исключения дребезга по фазе по аналогии с [9]
В результате мы получаем после предварительной фильтрации значения по каналу косинуса для обеспечения подстройки без дребезга по фазе, что позволяет определять значение частоты по количеству тактов, и это видно по сигналам sumfas и cos_s3 (рисунок 21). Это практически обеспечивает уже на этапе предварительной фильтрации подстройку по частоте Доплера за 100 мксек с наличием сдвига вплоть до нескольких мегагерц при потоке информации 30 - 150 Мбит/сек с выставлением в ноль дискриминационной характеристики для быстрой ФАПЧ.
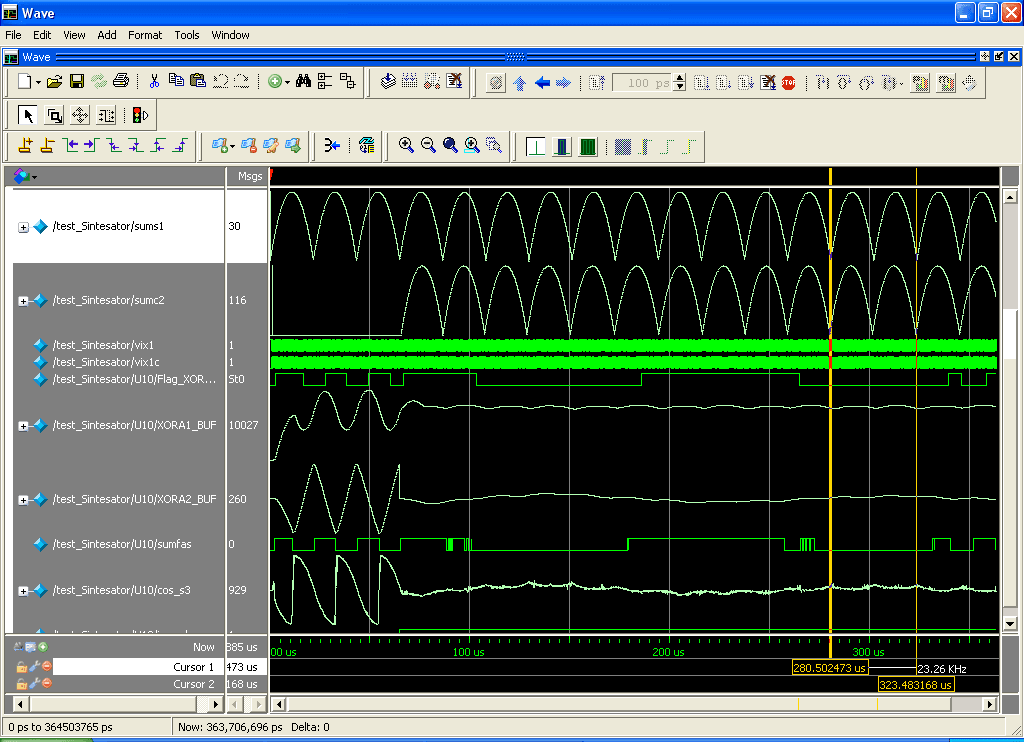
Рис. 21. Подстройка по частоте Доплера при сдвиге на 23,26 кГц с полосой фильтрации в 100 кГц при определении начальной частоты по количеству тактов
Сигналы XORA1_BUF и XORA2_BUF отражают фильтрацию по каналу синуса и косинуса при полосе в 100 кГц, что используется для ФАПЧ.
Таким образом, видно, что вариант по схеме рисунка 13 с учётом программного продукта разработанного в АНО «НТИЦ «ТЕХКОМ» исключает недостатки низкой помехозащищённости в других схемных решениях с учётом оптимизации радиотехнических параметров как по частоте дискретизации, по скорости передачи сигнала радиоуправления, по обработке по программе внутри ПЛИС и обеспечивает многофункциональное использование. Собственно это известное техническое решение обеспечивает микромодульное исполнение, а использование ПЛИС внутри этого модуля позволяет изменять «вшиваемые» программы в зависимости от комплекса решаемых задач и от вида принимаемого сигнала. Такая унификация с переходом на массовое производство, что может быть связано с производством мобильных устройств коммерческой сотовой связи, так и спутниковой связи, обеспечит низкую себестоимость микромодуля. При этом требуемая технология по созданию микросхем не требует исполнения в 20-28 нм, а может быть использована технология в 90 нм. Рассматриваемая нами элементная база имеет 15-летнюю давность. Соответственно в АНО «НТИЦ «ТЕХКОМ» было проведено математическое моделирование с получением экспериментального образца по исполнению заявленных характеристик. Результаты этого моделирования мы ниже приводим.
На рисунке 21 мы показали результаты математического моделирования для сдвига по частоте Доплера в 23 кГц с фильтрацией в полосе 100 кГц. При этом время подстройки по частоте Доплера меньше чем 100 мксек. На рисунке 22 показано выделение потока информации в 38 Мбит/сек при частоте Доплера в 23 кГц.
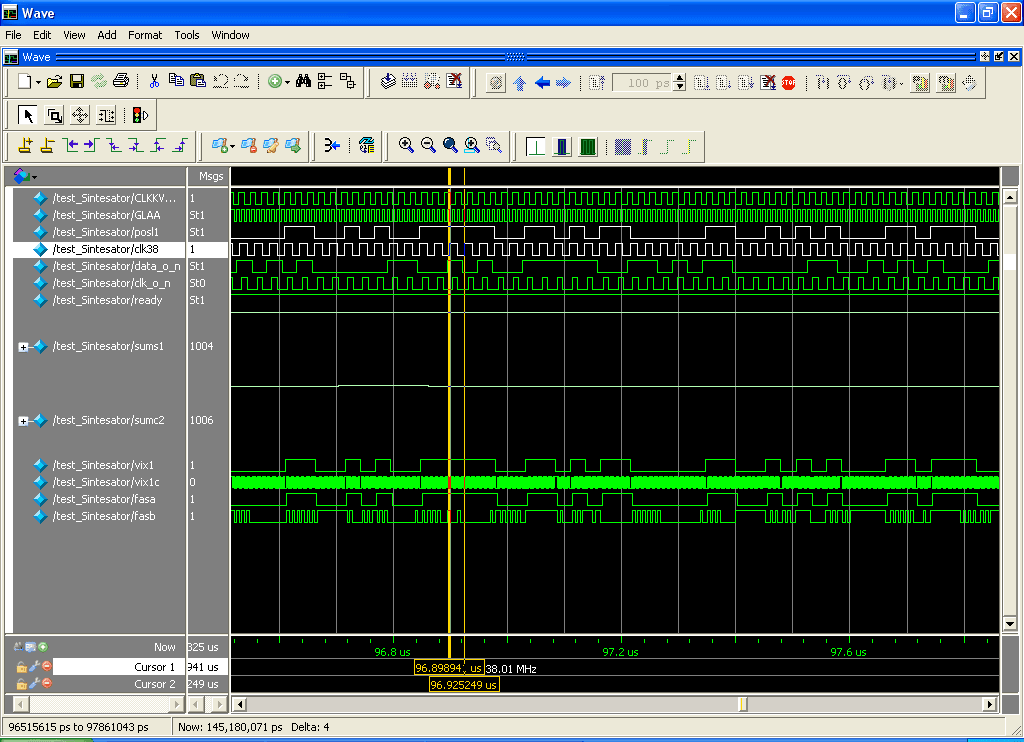
Рис. 22. Выделение информации уже при 100 мксек после начала подстройки
Здесь белым цветом отображён излучаемый сигнал и его такт, а зелёным цветом выделенный сигнал с его тактом синхронизации. Такая подстройка по частоте в 100 мксек позволяет сократить преамбулу в режиме QAM с получением скорости передачи информации от 114 до 150 Мбит/сек. Действительно, первоначально для запуска режима QAM надо вначале в режиме BPSK обеспечить подстройку по частоте Доплера. Далее можно перейти на режим QAM и использовать подстройку на основе сравнения амплитуд сигналов по каналам синуса и косинуса. В том канале, где амплитуда сигнала меньше, так как первоначальная подстройка уже осуществлена, это значение может быть использовано для формирования слежения по дискриминационной характеристике. Данный режим был осуществлён в математической модели и его реализация при потоке информации в 114 Мбит/сек показана на рисунке 23.
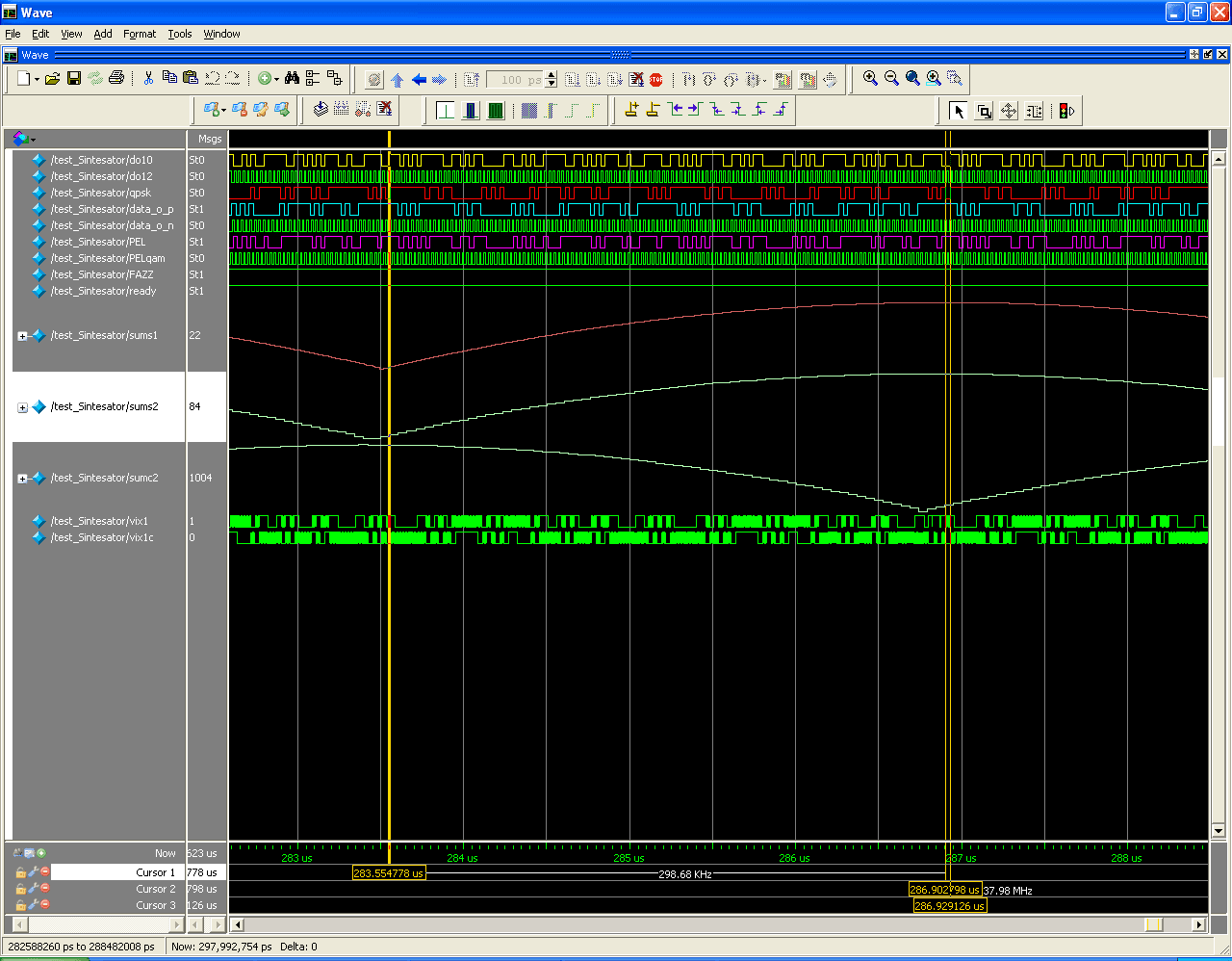
Рис. 23. Результаты математического моделирования на ПЛИС для входного сигнала QАМ при частоте Доплера 74 кГц (более высокая частота Доплера выбрана для наглядности подстройки на рисунке)
В данном случае получаются три потока информации по 38 Мбит/сек, при этом доплеровская частота равна 74 кГц. Жёлтым цветом обозначен первый поток информации в 38 Мбит/сек и тактовой частотой в следующей строке зелёным цветом (соответствует BPSK). Второй поток в 38 Мбит/сек (связан с QPSK) обозначен голубым цветом (красным цветом для сравнения входной поток, поступающий для обработки). Малиновым цветом обозначен третий поток информации в 38 Мбит/сек от амплитудной модуляции. Подстройка по Доплеру отображена в виде равенства сигналов коричневого и белого цвета с обозначениями sums1 и sums2, где sums1 отображает входную частоту Доплера, а sums2 отображает значение частоты подстройки (видно, что фазы практически совпадают, что соответствует когерентной обработке). Два последних сигнала в зелёном цвете, обозначенные как vix1и vix1c, отображают однобитовую информацию о фазах, поступающих на входы АЦП по каналу синуса и косинуса. Более наглядно для частоты в 23 кГц результаты выделения QAM сигнала показаны на рисунке 24.
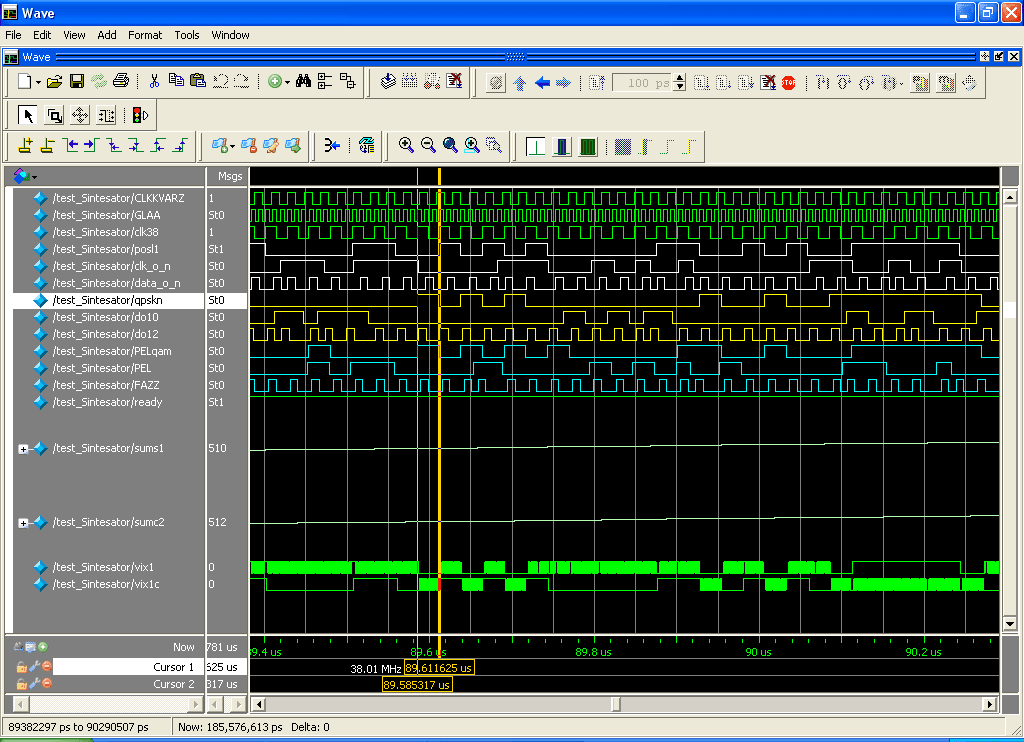
Рис. 24. Выделение сигнала QAM в ПЛИС при сдвиге по частоте Доплера в 23 кГц
Три потока информации с исходными входными сигналами показаны белым, жёлтым и голубым цветом. Отсюда видно, что подстройка с выделением сигнала менее 90 мксек. Понятно, что выделенные потоки информации могут использоваться для накопления для повышения помехозащищённости и скрытности по примеру решений GPS (ГЛОНАСС). Для примера на рисунке 25 мы приводим результаты математического моделирования с накоплением 64 импульсов для потока BPSK.

Рис. 25. Режим накопления по коду в 64 импульса с символом информации в 1,68 мксек (594 кГц)
Напомним, что в системе ГЛОНАСС кодовый импульс имеет длительность в 2 мксек (500 кГц). Здесь белым цветом (iposn) отмечен излучаемый ретранслятором информационный сигнал, а зелёным цветом (do10) отмечен выделяемый в ПЛИС сигнал радиоуправления с учётом накопления по коду в 64 импульса.
Отметим, что этот результат получен при варианте использования режима GPS когда подстройка по частоте Доплера осуществляется только после подстройки по коду накопления. Сам принцип подстройки вначале по коду, а потом определения сдвига по частоте Доплера в 23 кГц показан на рисунке 26.

Рис. 26. Начальный этап с выделением накопленного сигнала по коду в 64 импульса при частоте Доплера в 23 кГц
Из рисунка 26 видно, что определение начальной частоты по частоте Доплера составляет порядка 50 мксек. Здесь с учётом предварительной фильтрации в полосе 4,75 МГц по 3 параллельным каналам с тактами в 38 МГц и сдвигом между каналами по частоте дискретизации в 114 МГц, например, по синусу выделяется значение частоты Доплера (sin_s2), а в другом канале формируется дискриминационная характеристика (cos_s3). Далее для защиты от шумов с получением точного значения частоты Доплера по тактам используется цифровая фильтрация с полосой пропускания в 100 кГц, что отображено для сигналов XORA1_BUF (канал синуса по модулю) и XORA2_BUF (канал косинуса). Точное определение частоты позволяет точно определить и начало формирования замыкания цепи обратной связи с выставлением необходимых уровней в пропорционально-интегрирующей цепи обратной связи ФАПЧ с получением информации. Мы видим, что в канале (sin_s2) информация с накоплением по коду может быть выражена в многоразрядном виде, что аналогично аналоговому сигналу с модуляцией по амплитуде. То есть, возможен приём телевизионного сигнала с наличием кода накопления в 8 бит (накопление в 7 бит обеспечивается через код Баркера, а 8 бит может использоваться для достоверности информации по сумме).
На рисунке 27 мы показываем поступающий код накопления (posl), а ниже приводится выделяемый код в ПЛИС (data_on). Значения тактов clubu и FAZZ отображают синхронизацию по коду получения и выделения с учётом задержек при расстановке логических элементов в ПЛИС.
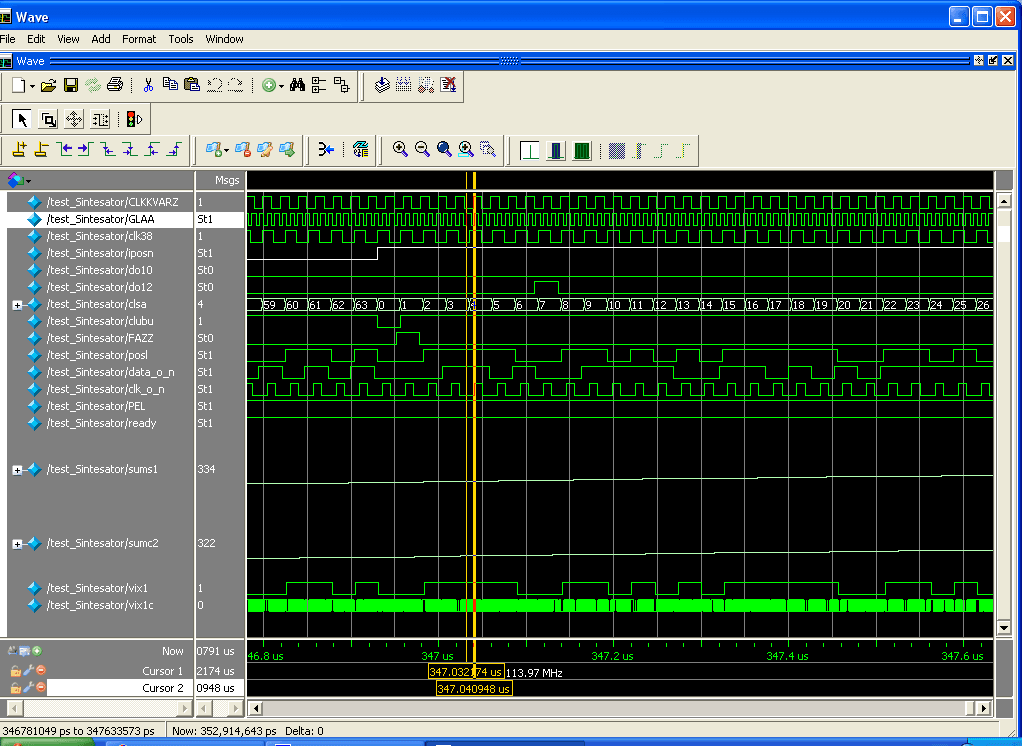
Рис. 27. Обработка в ПЛИС накапливаемого сигнала с учётом реальных задержек в логических элементах
На рисунке 28 отображена точность подстройки по частоте Доплера в 23 кГц, где исходная частота сдвига по Доплеру это sums1, а частота подстройки при ФАПЧ получаемая от ПЛИС sumc2.
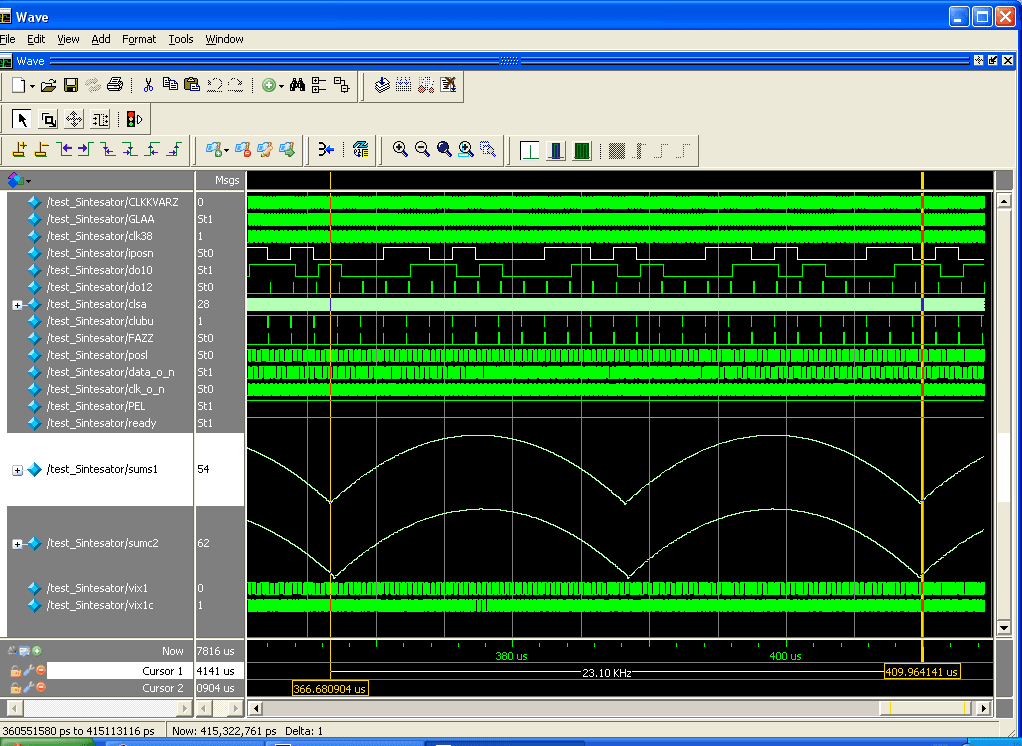
Рис. 28. Отображение точности подстройки по частоте Доплера
Надо отметить, что в реальности длительность импульса кода от ретранслятора и длительность кода внутри ПЛИС могут не совпадать. Поэтому требуется обеспечить режим подстройки по длительности кода. На рисунке 29 отображён режим накопления в интегральных накопителях со сбросом, с подстройкой по символам кода при разбиении на три потока по синусу и косинусу в 38 МГц и со сдвигом на такт в 114 МГц с учётом строба из двух соседних импульсов кода.
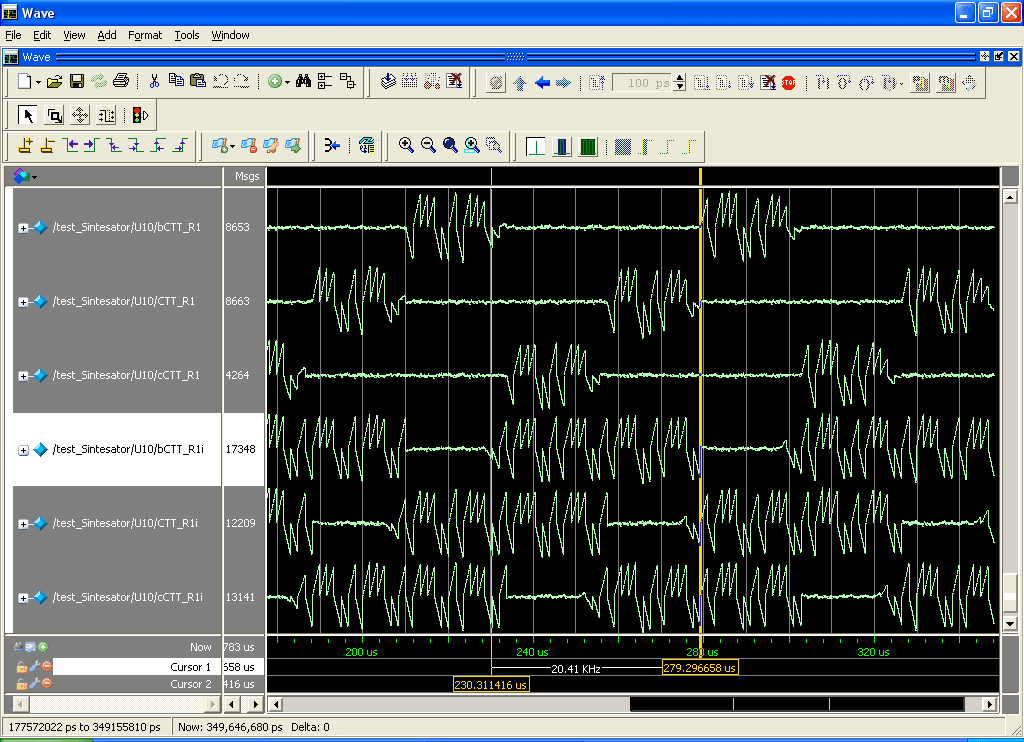
Рис. 29. Результат изменения динамики накопления в 6-ти каналах интегрального накопления со сбросом с учётом подстройки под длительность импульса кода входного сигнала
На рисунке 30 отображён вариант формирования импульсов для подстройки под длительность кода входного сигнала. Здесь на основании разницы амплитуд сигналов (vib, vib1, vib2) в двух смежных стробах по каждому из 3 параллельных каналов формируется сдвиг на такт по частоте в 114 МГц. Это изменение фиксируется импульсами, которые отмечены белым (nasad), жёлтым (nasad1) и голубым цветом (nasad2). В данном случае длительность входного кодового символа больше, чем длительность кодового символа формируемого в ПЛИС, и это может изначально задаваться.
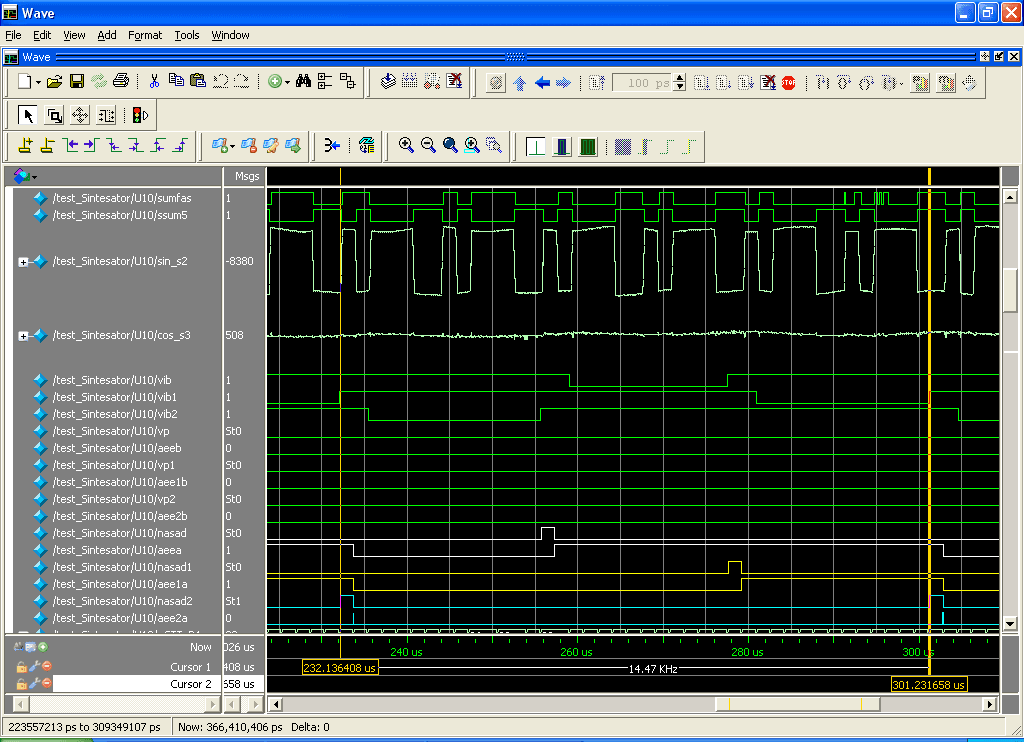
Рис. 30. Принцип подстройки под длительность символа входного сигнала
Из рисунка 31 мы видим, что если вначале осуществлена подстройка по коду как в режиме GPS, то подстройка по частоте Доплера не превышает 100 мксек. Отметим, что в режиме GPS такая подстройка осуществляется за десятки секунд. Кроме того, если мы осуществляем подстройку по частоте Доплера отдельно, то время подстройки будет фактически определяться временем подстройки по коду.

Риc. 31. Результирующий вариант подстройки с выделением кода информации при коде накопления в 64 импульса
Здесь длительность кода выбрана из условия проверки математического моделирования и может быть увеличена до десятков тысяч импульсов.
Надо отметить, что главной целью БПЛА дальнего действия является уничтожение объектов с высокой точностью, что требует точного определения местоположения БПЛА. Для этих целей необходимо создавать многофункциональную группировку космических аппаратов (КА) низкоорбитальных спутниковых систем связи (НССС), которая наряду с функциями связи могла бы обеспечивать навигацию для БПЛА как это показано в [10]. Такой вариант на основе блок-схемы приведённой выше для выделения сигналов в отличие от системы GPS (ГЛОНАСС) будет обладать наивысшей помехозащищённостью и экономически выгоден при многофункциональном использовании КА [11]. На первом этапе до развёртывания такой группировки КА в космосе можно обойтись закладкой соответствующих мобильных устройств в определённых местах с точным известным местоположением и по ним по методу, предложенному в [10] с включением по определённому коду обеспечить точную привязку на местности. Использование по рисунку 13 от внешнего управления непосредственного подключения к аналоговому модулятору позволяет использовать как частотную модуляцию, так и частотную манипуляцию, что означает наличие помехозащищённости как по амплитуде (короткий сигнал), фазе, так и по частоте. Использование ЛЧМ сигнала от внешнего управления на балансный амплитудный модулятор можно применить для определения высоты БПЛА или дистанционного зондирования Земли. Здесь на амплитудный модулятор по рисунку 13 может подаваться ЛЧМ сигнал с девиацией в 80 МГц. Соответственно при дальнейшем использовании умножителя на 2 (аналогично варианту схемы используемой в [12]), мы получим девиацию в 160 МГц, что позволит определять высоту с точностью до 0,9375 метра или выделять цели на местности.
Для проверки режимов работы в АНО «НТИЦ «ТЕХКОМ» был сделан экспериментальный образец мобильного устройства на отдельных компонентах с размерами со смартфон (рисунок 32).
Рис. 32. Первый образец мобильного устройства
Вариант экспериментальной установки для проверки показан на рисунке 33.

Рис. 33. Общий вид рабочего места при испытании мобильного устройства
На рисунках 34-36 показаны результаты испытаний.

Рис. 34. Вид сигнала длительностью 2,6 ×10-8 нсек (38 МГц) на входе АЦП при приеме на уровне сигнала на входе минус 36 дБм

Рис. 35. Выделенная частота доплеровского смещения при приеме на уровне сигнала на входе минус 36 дБм

Рис. 36. Результаты принятия видеоизображения
В результате проведённого анализа были выполнены следующие действия:
- Обоснован вариант оптимальной блок-схемы приёма-передачи сигнала радиоуправления с учётом помехозащищённости и скрытности на основе амплитудной, фазовой и частотной модуляции.
- Проведён оптимальный выбор радиотехнических параметров для сигналов радиоуправления по параметрам модуляций.
- Показана возможность и необходимость многофункционального использования для снижения себестоимости.
- Приведён конкретный вариант предлагаемого оптимального варианта на мобильном устройстве с ПЛИС, что позволяет быстро менять вшиваемую программу в зависимости от комплекса поставленных задач.
- Приведены экспериментальные проверочные результаты.
