
Современные беспилотные летательные аппараты (БПЛА) имеют многофункциональное назначение. Они могут выполнять мирные задачи доставки грузов, контроль окружающей среды, например, с целью оценки урожаев и предупреждения возгораний леса, оценки толщины льда в качестве радиовысотомеров в северных широтах, для обеспечения Интернет и связи между удалёнными друг от друга пунктами, для определения местоположения объектов. В военных целях, они могут использоваться с целью уничтожения объектов противника, радиотехнической разведки, постановки помех, передачи изображения с поля боя и для управления подразделениями, дистанционного зондирования Земли в различных диапазонах частот с целью определения замаскированных целей, точной корректировки огня и т.д. Особенно надо отметить, что частотный радиодиапазон БПЛА может лежать от сотен МГц до десятков ГГц, что фактически сводит к нулю возможности противодействия средствами радиоэлектронной борьбы (РЭБ), так как радиотехническая разведка (РТР) просто не успевает зафиксировать наличие сигнала при перестройке таких параметров как частота, фаза с прерывистостью передаваемого сигнала. Низкая высота полёта и малые размеры также обеспечивают прорыв противовоздушной обороны (ПВО) противника, особенно если используется массовый запуск БПЛА с системой их взаимодействия, работающих в разных диапазонах частот. То есть, против системы ПВО используется система прорыва с управлением взаимодействия, когда БПЛА имеют определённые функции по разведке, подавлению и уничтожению с возможностью их смены. Так как место и маршруты прорыва известны, то концентрация усилий позволяет прорвать любую оборону с помощью соответствующего количества БПЛА. Отметим, что узкоспециализированные БПЛА дают большие экономические расходы, хотя и позволяют лучше решать частные задачи. Соответственно в этом случае стоит вопрос о применении технологии двойного назначения с целью удешевления блоков и узлов для БПЛА при их массовом производстве, унификации, при правильном выборе радиочастотного диапазона, где бы могли выполняться как мирные, так и военные задачи. Соответственно это возможно за счёт оптимизации функциональных схем радио модулей. Понятно, что существует минимальный набор функций, как в мирных, так и в военных целях для выработки требований к блоку и узлам БПЛА. Соответственно имеем основные требования:
- обеспечение радиоуправления БПЛА;
- передача необходимых данных;
- определение высоты полёта БПЛА;
- обеспечение связи и Интернет;
- определение местоположения БПЛА;
- быстрое вхождение в режим связи и радиоуправления;
- высокая помехозащищённость;
- наведение по источнику излучения;
- возможность выполнения радиоэлементов в микроминиатюрном виде одной микросхемы с целью сокращения размеров и веса;
- унификация отдельных узлов для многофункционального использования.
В [1] мы, на основе анализа вариантов блоков радиоуправления БПЛА с учётом приёма и передачи, определили функциональную схему наипростейшего начального микромодуля. Здесь на рисунке 1, мы приводим более подробную функциональную схему с учётом законченного узла радиоуправления и возможностью использования дуплексного режима связи.
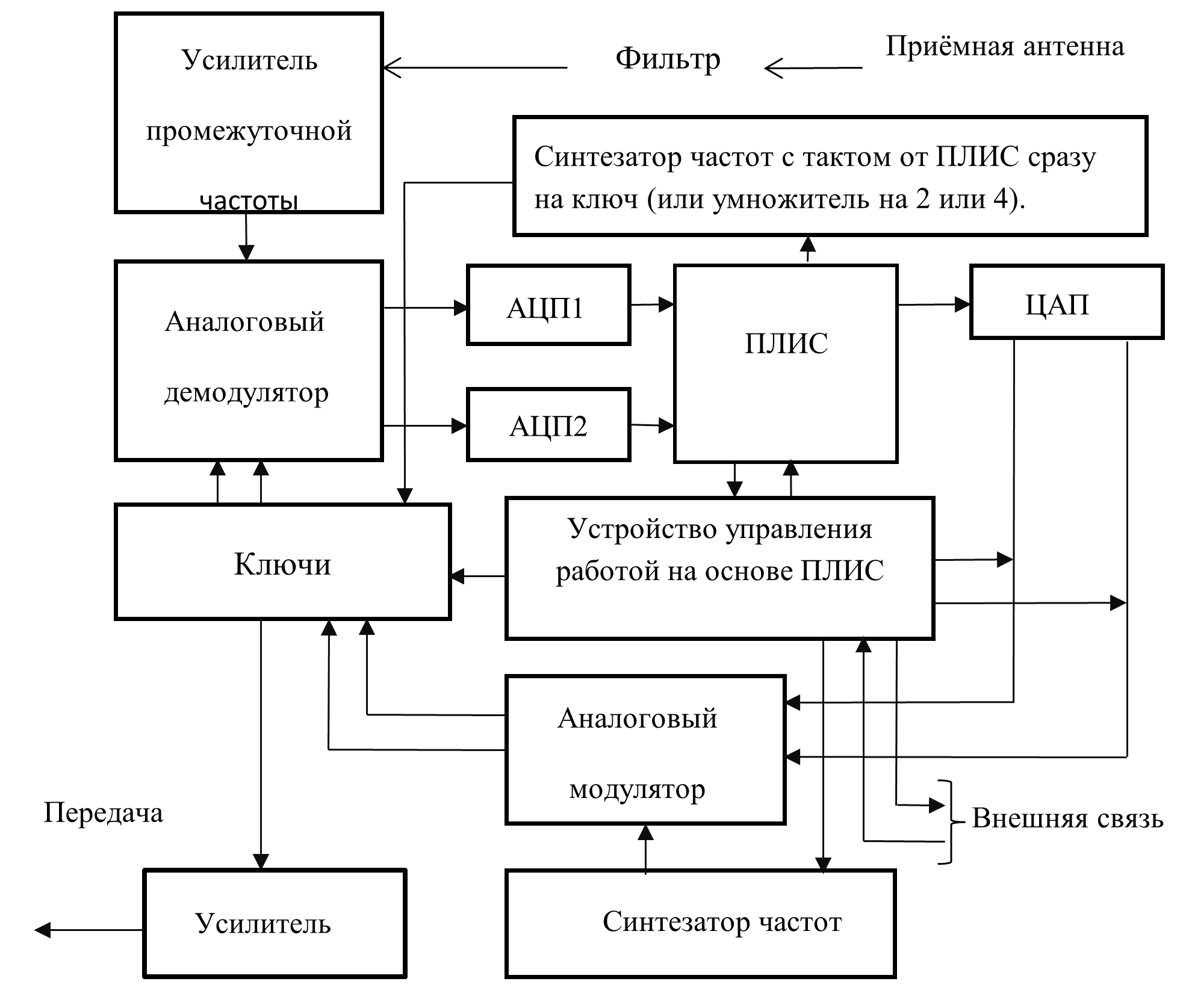
Рис. 1. Функциональное исполнение микромодуля 1 для реализации способа быстрой цифровой фазовой автоподстройки частоты для оптимальной когерентной обработки радиосигналов
В указанную конфигурацию микромодуля 1 не входит блок приёмо-передающей антенны, в котором могут использоваться как малошумящие усилители (МШУ), так и соответствующие фильтры на приём и передачу, с ключами и фазовращателями, так как тип антенны и частота будет зависеть от выполняемых задач и поэтому должны иметь самостоятельное исполнение. На рисунке 1 не показаны сигналы тактовой частоты дискретизации на аналого-цифровые преобразователи (АЦП), так как через ключевую схему возможен вариант формирования от программируемой логической интегральной схемы (ПЛИС) и от синтезаторов частот, которые показаны отдельно. Использование синтезатора частоты на основе ПЛИС и «вшитой» в него программы связано с возможностью использования дуплексного режима (одновременный приём и передача) и именно поэтому желательно иметь отдельную антенну с набором фильтров на приём и передачу. Сужение изначальной полосы входных фильтров антенны позволяет исключить влияние импульсной помехи перегружающей входной тракт. Выбор указанной функциональной схемы был проведён с учётом оптимизации параметров радиосигнала по способам модуляции с получением наилучшей помехозащищённости и чувствительности. Реализуемость в широком диапазоне частот определяется наличием радиоэлектронных компонентов, которые на данном этапе далеки от совершенства с точки зрения оптимизации. Поэтому на начальном этапе в предлагаемом варианте функциональной схемы используется ПЛИС А3РЕ3000L (Reprogrammable Flash Technology 130-nm, максимальная частота внутри ПЛИС 350 МГц), АЦП состоят из микросхемы ad9254 с тактовой частотой до 150 МГц при разрядности в 14 бит, ЦАП возможен на микросхеме ad9763 с передачей до 125 Мбит/сек с разрядностью 10 бит и потреблением 380 млВт при 5 В (возможно первоначальное использование ЦАП на микросхеме ad9761 с передачей до 40 Мбит/сек, разрядностью 10 бит и потреблением 200 млВт при 5 В). Аналоговый балансный модулятор, например, ad8345 имеет полосу модуляции в 80 МГц на первом входе и с переносом частоты в область от 140 МГц до 1 ГГц. На второй вход аналогового балансного модулятора поступает сигнал от синтезатора частоты adf4360-7 с частотой от 175 МГц до 900 МГц. Сигнал с аналогового модулятора поступает на первый вход аналогового балансного демодулятора (ad8348 с рабочими частотами от 50 МГц до 1 ГГц и полосой пропускания 60 МГц), на второй вход которого поступает сигнал от пользователя через усилитель промежуточной частоты (УПЧ), и тем самым цепь обратной связи ФАПЧ замыкается. Здесь приём сигнала для радиоуправления может лежать вплоть до 1 ГГц, например, для приёма сигналов в полосе приёма системы связи «Гонец» может использоваться в качестве усилителя промежуточной частоты (УПЧ) микросхема AD8309 от 5 до 500 МГц с коэффициентом усиления в 100 дБ (возможно применение AD8313 от 01,-2,7 ГГц) с коэффициентом усиления 70 дБ). В этом случае показанный микромодуль по рисунку 1 в [1] уже имеет диапазон частот от 175 МГЦ до 1 ГГц для обеспечения связи, а значит и радиоуправления, то есть соответствует диапазону частот системы связи Гонец в соответствии с таблицей 1.
Таблица 1
Параметры спутниковой системы связи «Гонец»
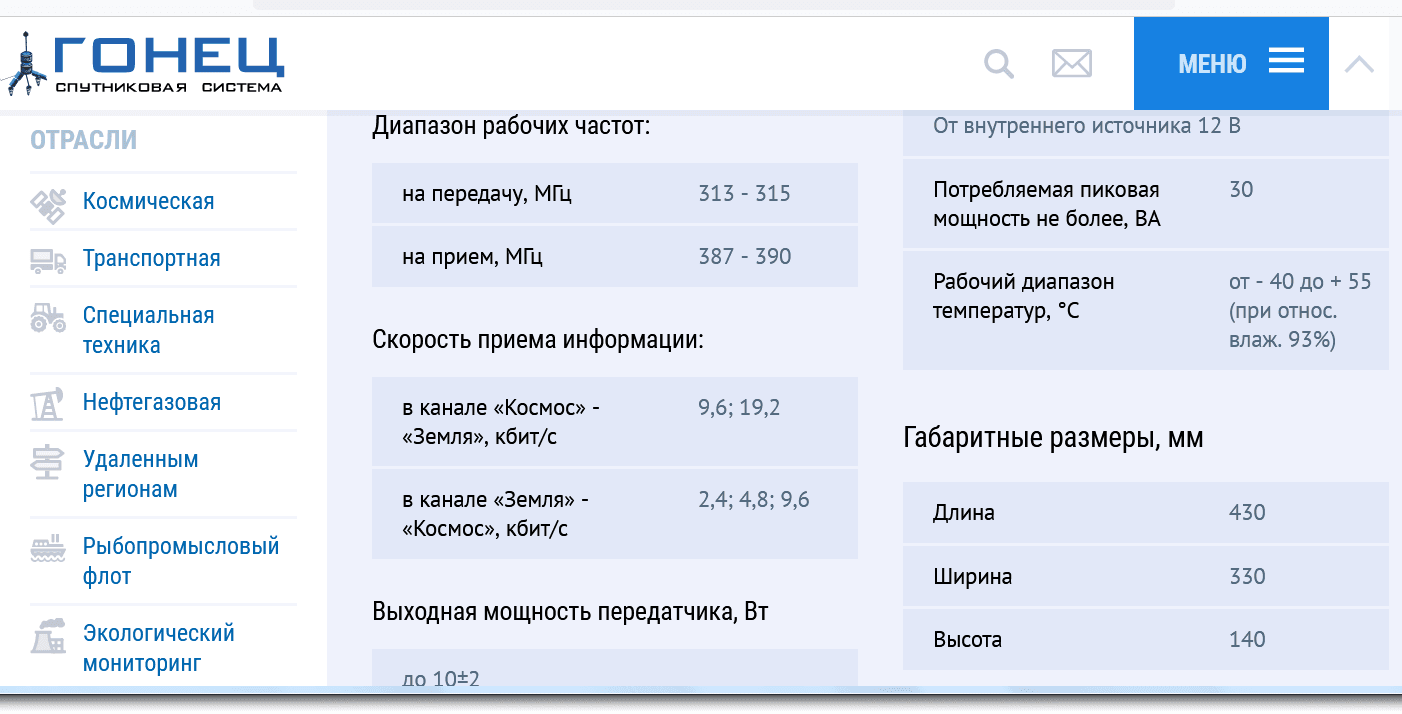
Соответственно в силу того, что несущая частота в системе связи «Гонец» изменяется от 300 МГц до 400 МГц, а сброс сигнала перед обработкой в АЦП может осуществляться в полосу от 0 до 20 МГц, то более предпочтителен вариант, когда синтезатор частоты имеет отдельное исполнение, что позволяет через внешнее управление менять диапазон используемых частот. Так как параметры передачи информации в системе связи Гонец совпадают с минимальными параметрами для радиоуправления БПЛА, то отсюда предлагаемый микромодуль по рисунку 1 может иметь уже в данном исполнении многофункциональное применение и даже заменять терминал системы связи Гонец. Понятно, что внешнее управление должно обеспечивать по разным программам тот или иной многофункциональный режим, что означает, что желательно внешнее управление также выполнять в виде процессора в ПЛИС. Круг задач, которые должен выполнять процессор внешнего управления обычно имеет стандартный набор, поэтому желательно использовать уже готовый вариант, используемый на БПЛА с добавлением функций. Как мы отметили выше, микромодуль 1 уже обеспечивает приём и передачу сигналов в области работы системы связи Гонец в 300-400 МГц. Одновременно он может использоваться и для связи в системе GSM с частотами 800 МГц, 850 МГц, 900 МГц. Понятно, что диапазон использования такого микромодуля ограничен частотой в 1 ГГц, но это не значит, что в результате оптимизации радиоэлектронных компонентов его нельзя расширить. В комплексе абонентский терминал, предназначенный для системы связи «Гонец», обеспечивает также приём сигналов GPS (ГЛОНАСС) по таблице 2.
Таблица 2
Параметры терминала для системы Гонец
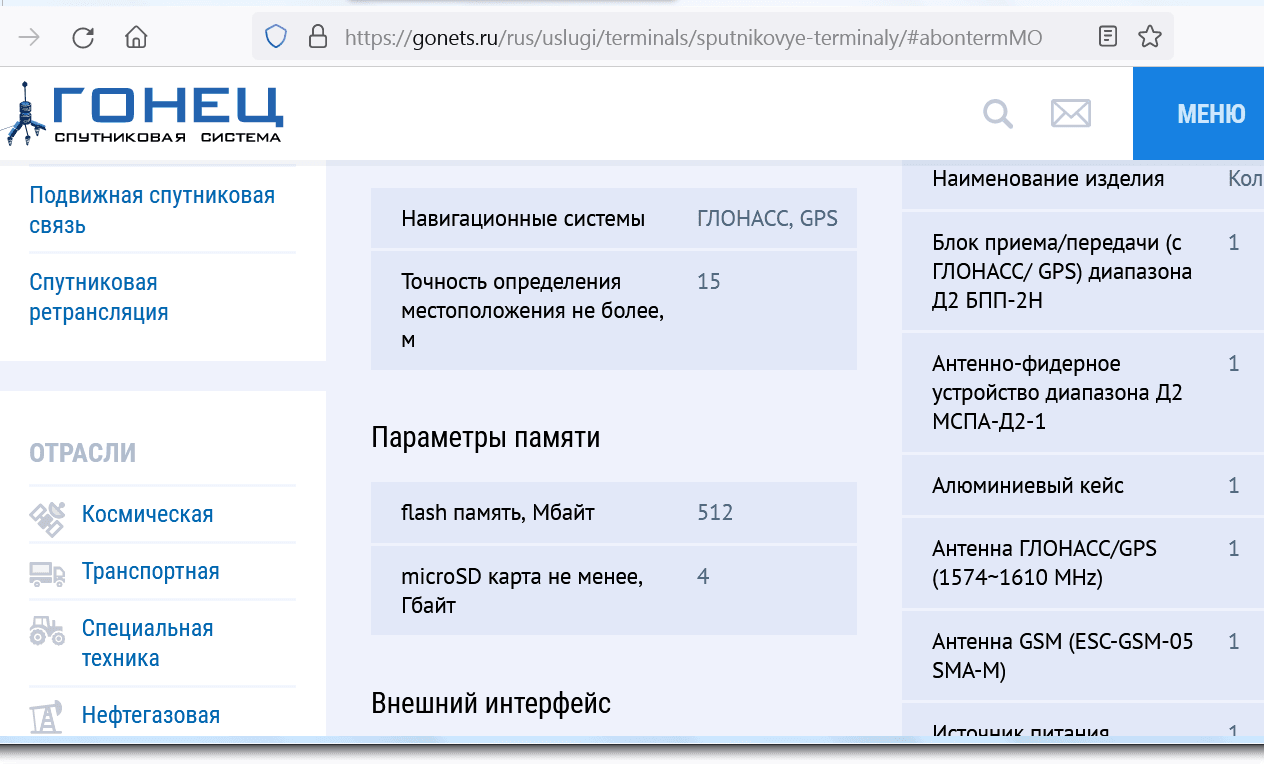
А это означает, что в этом варианте мы должны использовать подключение микромодуля по рисунку 1 к дополнительному устройству переноса частот в диапазон 1574-1610 МГц, тем более, что в этом диапазоне частот используются сигналы для приёма информации через спутниковую систему Iridium [2]. Отметим, что сотовая связь GSM имеет также частоты 1,8 ГГц, 1,9 ГГц и 2,1 ГГц, а это означает, что если использовать микромодуль 1 как законченное мобильное устройство широкого потребления, то надо предусмотреть и преобразование этих частот GPS (ГЛОНАСС) и GSM в область ниже 1 ГГц. Такой экспериментальный образец с наличием платы преобразования частоты был получен в АНО «НТИЦ «ТЕХКОМ» (рисунок 2).

Рис. 2. Первый образец мобильного устройства
Иными словами микромодуль 1 как устройство блока радиоуправления БПЛА с дополнением платы преобразования частоты может замещать как мобильные устройства систем Iridium, Гонец, сотовые устройства GSM, так и терминалы GPS (ГЛОНАСС), а также может служить устройством радиоуправления и передачи изображения от дешёвых квадрокоптеров (сейчас используется 2,4 ГГц без перестройки по частоте). То есть, современные квадрокоптеры не имеют помехозащищённости в отличие от варианта радиомодуля предлагаемого по рисунку 2. Кроме того, в случае предлагаемого радиомодуля можно использовать связь между абонентами, снабжёнными мобильными устройствами разных типов через БПЛА. Другой вариант использования мобильного устройства по рисунку 2 на БПЛА может быть связан с уничтожением объектов осуществляющих связь через системы Iridium и Globalstar через наведение по сигналу передачи и поэтому в этом случае желательно использовать АФАР состоящую как минимум из четырёх элементов (патч) по приёму сигнала для углового сканирования (возможно также механическое сканирование с меньшим количеством патч). Так как БПЛА должны использовать сигналы GPS (ГЛОНАСС) для определения своего местоположения, то отсюда следует, что желательно иметь общий оптимизированный радиомодуль, с соответствующими выводами для приёма и передачи сигналов. Однако мы можем расширить требования к модулю переноса частот с тем, чтобы он принимал и передавал сигналы до 2,7 ГГц (с целью защиты от помех желательно иметь ещё более широкий диапазон частот), так как мобильное устройство для приёма сигналов от Globalstar [3] имеет диапазон от 2,4835 ГГц до 2,5 ГГц. В этом случае барражирующий БПЛА может сам формировать помехи устройствам приёма абонентов на этих частотах. То есть, радиомодуль с микромодулем 1 по рисунку 1 и с переносом частот, позволяет использовать такое общее устройство и в качестве создания радиопомех для систем GPS, Iridium и Globalstar. При этом, даже при использовании малоразмерных АФАР данного диапазона состоящих всего из 4-х элементов патч (пример такой антенны будет рассмотрен несколько ниже) возможно, на основе углового сканирования, наведение на источник мобильной связи. Эффективность этого метода показали события при выполнении специальной военной операции. Надо отметить, что модуль переноса частот в Х – диапазон позволит формировать радиопомехи и для системы связи Starlink [4], а также Oneweb [5], или принимать такие сигналы, но при этом требуются АФАР с достаточно высоким коэффициентом направленного действия и с большим количеством элементов приёма. Поэтому, более простым вариантом будет использование БПЛА в качестве средств уничтожения пунктов передачи сигналов от терминалов Starlink и Oneweb с применением малоразмерных АФАР с малым количеством элементов (порядка 4-х патч) приёмной щелевой антенны. Барражирующие БПЛА, с микромодулем 1 и применением модуля переноса частот, можно использовать в качестве средства постановки помех и для систем дистанционного зондирования Земли типа TerraSAR-X. С этой целью дополнительно можно предусмотреть считывание выборок сигнала ЛЧМ из оперативной памяти DDR1 или DDR2 со скоростью 125 МГц на ЦАП (ad9760). В этом случае формируется ЛЧМ сигнал с изменением частоты до 125 МГц. Выборки ЛЧМ в оперативную память могут перед началом работы заноситься от программы «вшитой» в ПЛИС A3PE3000L. Этот канал формирования ЛЧМ может быть предусмотрен во внешнем устройстве с наличием оперативной памяти, сигналы с которого поступают на ЦАП и будут передаваться на аналоговый модулятор. Необходимо отметить, что ЛЧМ сигналы с разной модуляцией после привязки по времени приёма, от верхней частоты до нижней частоты (как бит «1») и от нижней частоты до верхней частоты или само отсутствие сигнала (как бит «0»), могут также использоваться для передачи информации. Понятно, что, расширение диапазона принимаемых частот с помощью модулей переноса частот также положительно сказывается на помехозащищённости канала радиоуправления БПЛА, так как приводит к размазыванию помехового сигнала РЭБ по всему предполагаемому диапазону и поиску его средствами радиотехнической разведки (РТР). Однако на современном этапе стоит вопрос обеспечить выполнение многофункциональности и помехозащищённости с использованием доступной по технологии радиоэлектронной компонентной базы, которая в короткие сроки может быть освоена нашей промышленностью с целью импорт замещения в условиях специальной военной операции. Соответственно, что в этом случае, для выполнения боевых задач БПЛА, одновременно с методами обеспечения помехозащищённости канала радиоуправления, что нами было показано в [1], при многофункциональном использовании и унификации блоков, стоит вопрос прорыва обороны противовоздушной обороны (ПВО) на предельно малых высотах по рельефу местности. А это невозможно без определения высоты полёта и координат по местоположению с учётом помехозащищённости этих каналов информации. Таким образом, стоит задача возможности унификации блока радиоуправления по выполнению функций радиовысотомера и определения местоположения БПЛА в условиях радиопомех, а это связано с предъявлением соответствующих требований к функциональным схемам для приёма таких сигналов радиовысотомера и навигации, и к программе обработки этих сигналов в ПЛИС. Высота полёта БПЛА порядка 50 метров над поверхностью Земли определяет величину зондирующего импульса радиовысотомера, и при скважности импульсов Q=2 не должна превосходить величину порядка 50 м/(3×108м/с)=0,166 мксек, что соответствует полосе частот в 6,02 МГц. Но если предположить возможность сближения с Землёй перед посадкой до 6 или 8 метров, то тогда величина зондирующего импульса должна быть ещё меньше и равняться 0,02 мксек (или 0,0266 мксек) с полосой частот импульса в 50 МГц (38 МГц). Собственно малая высота полёта может пригодиться и для выполнения народнохозяйственных задач, например, опыления растений. При этом желательная точность определения высоты полёта должна составлять около 1 метра, что определяет частоту дискретизации в АЦП порядка 150 МГц. Собственно результаты математического моделирования на ПЛИС A3PE3000L показывают, что можно добиться такой обработки сигнала в ПЛИС с полосой частот импульса при трёх потоках информации с дискретизацией в 50 МГц с задержкой этих потоков на такт в 150 МГц относительно друг друга. Однако, это требует более тщательного выбора задержек между логическими элементами при размещении на ПЛИС непосредственно с вмешательством разработчика программы, и есть рост энергетических потерь в ПЛИС. Поэтому на данном этапе в АНО «НТИЦ «ТЕХКОМ» была апробирована математическая модель с учётом задержек на ПЛИС A3PE3000L при подаче тактовой частоты в 152 МГц от ПЛИС на АЦП при использовании разделения сигналов на 4 потока с дискретизацией по 38 МГц со смещением на такт в 152 МГц между потоками. Это снижает как требования по задержкам между логическими элементами ПЛИС, так и потери при обработке в ПЛИС.
Понятно, что использование режима накопления импульсов при определении высоты при использовании многоразрядного АЦП позволяет улучшить точность определения высоты за счёт учёта разницы уровней сигналов в 4 потоках с дискретизацией в 38 МГц, и тогда точность определения высоты перед посадкой может доходить до 0,1 метра с учётом сплайнов. На рисунках 3-6 показаны результаты математического моделирования с тактом дискретизации в АЦП порядка 152 МГц при 4 потоках с дискретизацией каждого потока в 38 МГц и сдвигом на такт в 152 МГц между потоками относительно друг друга. При этом был взят более сложный случай для многофункционального использования в режиме навигации и накопления сигнала по принципу выделения сигнала в GPS. То есть режим радиовысотомера на малых высотах – это упрощённый вариант накопления сигнала, как с кодированием, так и без.
 Рис. 3. Отображение режим накопления по 64 импульсам в режиме GPS до момента вхождения в символьную синхронизацию (до 233 мксек) с переходом в режим определения частоты Доплера при такте в АЦП в 152 МГц до замыкания фазовой автоподстройки частоты (ФАПЧ)
Рис. 3. Отображение режим накопления по 64 импульсам в режиме GPS до момента вхождения в символьную синхронизацию (до 233 мксек) с переходом в режим определения частоты Доплера при такте в АЦП в 152 МГц до замыкания фазовой автоподстройки частоты (ФАПЧ)
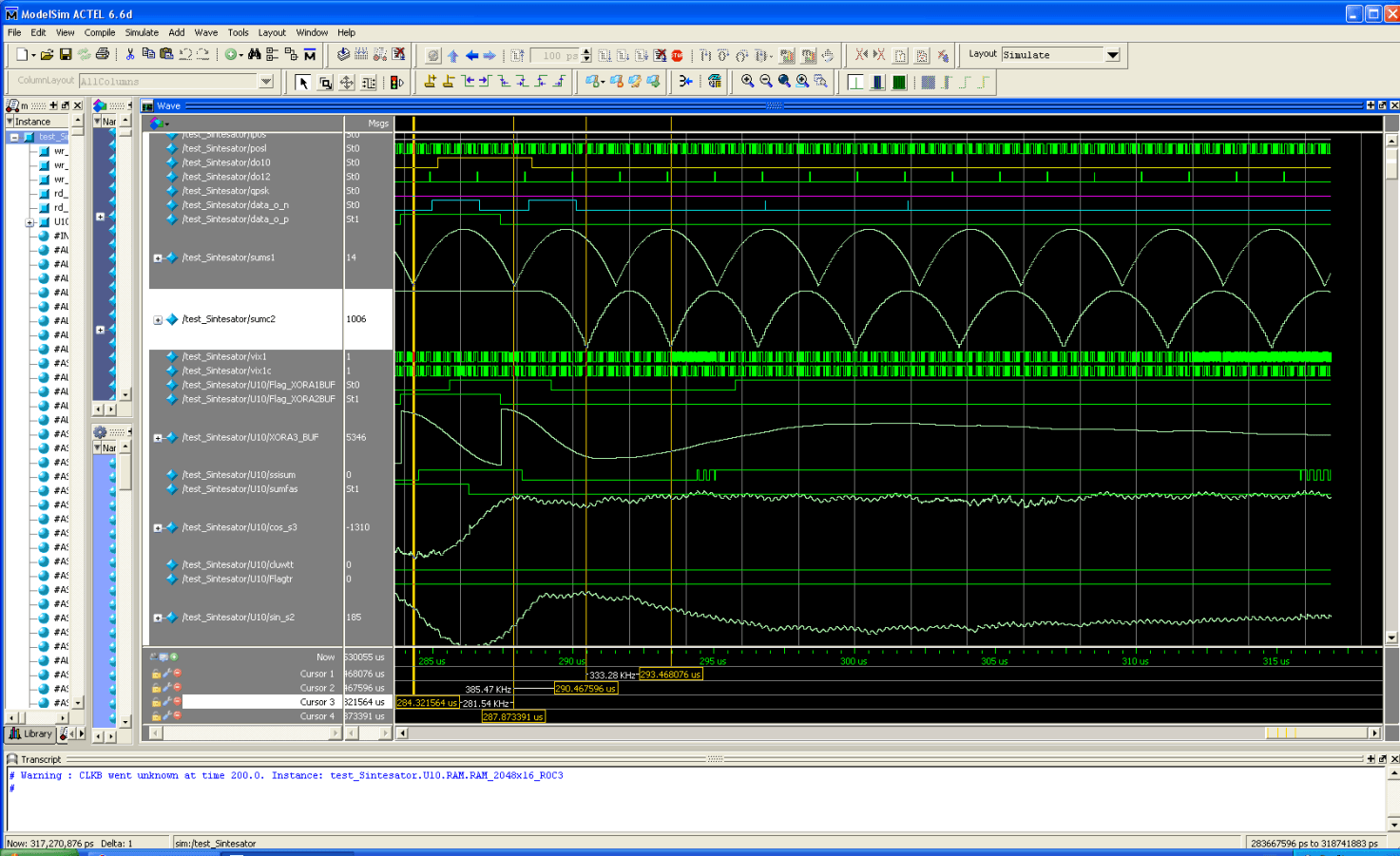
Рис. 4. Результаты математического моделирования при тактовой частоте дискретизации в АЦП в 152 МГц в режиме накопления 64 импульсов по методу GPS в момент замыкания ФАПЧ (267 мксек)

Рис. 5. Отражение математического моделирования для формирования потока 38 МГц (clk38) при дискретизации в АЦП в 152 МГц (GLAA)

Рис. 6. Режим накопления по 64 импульсам при такте в 152 МГц в режиме QPSK, что может быть использовано для радиовысотомера при высоте полёта БПЛА в 250 - 400 метров для помехозащищённости от обнаружения сигнала РТР
Соответственно стоит вопрос о чувствительности и необходимой мощности сигнала такого радиовысотомера с учётом высоты полёта БПЛА до 400 метров. Отсюда вычислим необходимые параметры для радиовысотомера БПЛА при обеспечении полосы пропускания не менее 38 МГц без накопления зондирующих импульсов. В этом случае считаем коэффициент усиления луча антенны радиовысотомера БПЛА Gпрди= Gпрм=G=3 (5 дБ), такой коэффициент усиления имеет антенна мобильного устройства на основе одного патч в худшем случае. Мощность от усилителя SZA 2044 (2-2,7 ГГц) составит Pпрди=1 Вт. Выбор малой мощности передатчика, особенно при работе в импульсном режиме позволяет исключить наведение по источнику сигнала противорадиолокационных ракет. В данном случае желательно иметь несущую частоту порядка 2,7 ГГц, так как в этом случае отражение от подстилающей поверхности Земли также выше. Соответственно считаем эффективную поверхность отражения порядка σ=1 м2. Выбираем отношение сигнал/шум q=27 (вероятность ошибки для ФКМ сигнала 10-7 по рисунку 7 [6], при шумовой температуре Тш=600 К, соответственно в формуле k – постоянная Больцмана, частота fи =2,7 ГГц (длина волны λи=0,111 м).
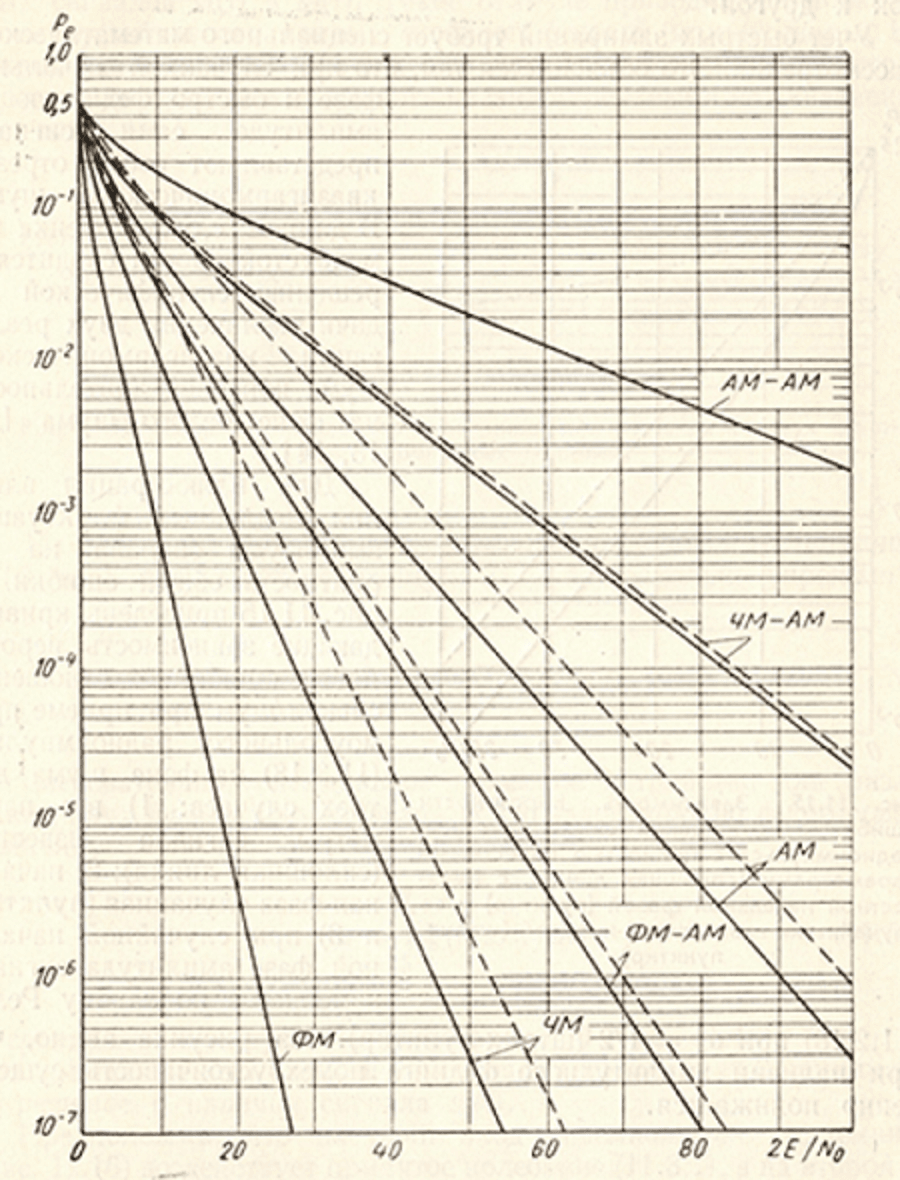
Рис. 7. Вероятность общей ошибки для различных систем радиотелеграфии при приёме на фоне шума детерминированных сигналов (сплошные линии) и сигналов со случайной начальной фазой (пунктир)
Отсюда имеем желаемую полосу пропускания:
 (1)
(1)
Однако возможен вариант использования антенны радиовысотомера состоящей из 4-х патч размерами 16,5 см×16,5 см. Например, для связи в [7] используется диапазон 2,35 ГГц - 2,55 ГГц (при полосе пропускания 200 МГц, что позволяет менять по случайному закону значение несущей частоты) с коэффициентом усиления порядка 14,5 дБ при КСВН<1,2, рисунок 8,9.

Рис. 8. 4-х элементная АФАР с воздушным заполнением
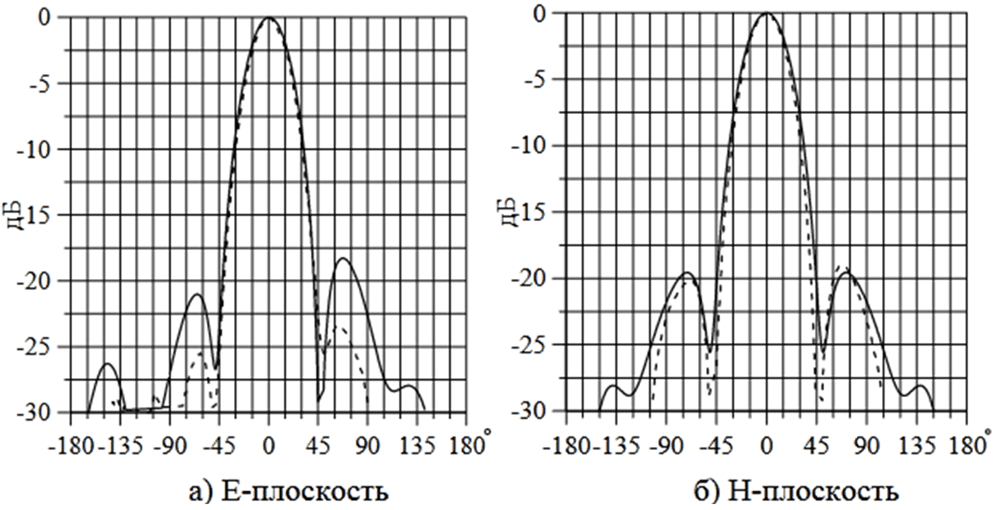
Рис. 9. Антенна из 4-х элементов патч, моделирование – это сплошные линии, штриховые линии – это экспериментальные с шириной диаграммы направленности в 34 градуса
В этом случае можно снизить мощность излучения в 88 раз или улучшить отношение сигнал/шум. Соответственно здесь улучшается помехозащищённость и снижается вероятность поражения радиолокационной ракетой. При накоплении зондирующих импульсов можно обеспечить точность определения высоты до 0,1 метра с использованием сплайнов по 3-4 потокам внутри ПЛИС разнесённым с задержкой на такт в 150 МГц, значения которых будут вычисляться в процессоре внешнего управления.
Таким образом, предлагаемый микромодуль с учётом переноса частот в полосу 2-2,7 ГГц позволяет выполнять и функции радиовысотомера с необходимой точностью и высокой помехозащищённостью. Так как функции радиовысотомера и радиоуправления с передачей изображения необходимы и для народнохозяйственных задач, то использование общего микромодуля позволяет снизить расходы.
Ещё одним слабым местом в современных БПЛА является точное определение местоположения с обеспечением высокой помехозащищённости от средств РЭБ. Не секрет, что сигналы GPS (ГЛОНАСС) могут быть легко подавлены обычным перизлучением сигналов GPS (ГЛОНАСС) из нескольких точек не считая использования обычных шумовых сигналов. В [8] мы рассматривали помехозащищённые варианты определения местоположения на основе низкоорбитальных спутниковых систем связи (НССС) при использовании нашего микромодуля с учётом быстрой фазовой автоподстройки по частоте Доплера [9] при оптимальном конструктивном выполнении космического аппарата (КА) с учётом расположения антенн [10]. Этот вариант в [8] является не только помехозащищённым, но и многофункциональным, а также обеспечивает большую точность навигации. Однако создание космической группировки в 98 КА требует достаточно много времени. Поэтому на данном этапе против помех используется автономная инерциальная система. Она осуществляется с помощью:
- датчиков линейного ускорения (акселерометров);
- гироскопических устройств, воспроизводящих на объекте систему отсчёта (например, с помощью гиростабилизированной платформы) и позволяющих определять углы поворота и наклона объекта, используемые для его стабилизации и управления движением.
- вычислительных устройств (ЭВМ), которые по ускорениям (путём их интегрирования) находят скорость объекта, его координаты и др. параметры движения.
Преимущества методов инерциальной навигации состоят в автономности, помехозащищённости и возможности полной автоматизации всех процессов навигации.
Поэтому инерциальная навигация используется в военных целях: в крылатых ракетах и БПЛА, в случае радиоэлектронного противодействия противника. Как только система навигации крылатой ракеты или БПЛА обнаруживает воздействие средств РЭБ противника, блокировку или искажение сигнала GPS (ГЛОНАСС), она запоминает последние координаты и переключается на инерциальную систему навигации. Однако инерциальная система навигации имеет накапливаемую ошибку. Поэтому, сейчас в целях восполнения точности наведения БПЛА и определения его местоположения, с учётом помехозащищённости, приходится выискивать пути, позволяющие достигать необходимую точность наведения и определения местоположения, за счёт использования как наземных «реперных» точек (точка привязки измерений) с изначальным точным определением их местоположения, так и подвижных «реперных» точек (например, дополнительные БПЛА), в зоне пролёта которых влияние помех не наблюдается, и которые находятся в пределах прямой видимости ведомого БПЛА. Понятно, что в случае подвижных реперных точек метод навигации может быть основан на использовании нескольких летательных аппаратов, местоположение которых достаточно точно определяется по методу навигации, по аналогии с методом, который используется для КА GPS (ГЛОНАСС). Возможен также вариант непосредственного радиоуправления БПЛА по передаваемому от БПЛА изображению местности, но из-за дальности и изменяемого рельефа местности может потребоваться использование промежуточных БПЛА в качестве ретрансляторов сигнала. Отметим, что запросно-ответная система на основе суммарно-разностного дальномерного метода [8], рассмотренная с применением КА, позволяет существенно поднять помехозащищённость, в силу использования различного кодирования, изменения несущей частоты, а также позволяет исключить возможность наведения противорадиолокационными ракетами в силу недосягаемости высоты орбит. При этом, средства радиотехнической разведки (РТР) не смогут выделить такой псевдослучайный навигационный сигнал от КА из шумов. Но так как в настоящее время группировка КА НССС отсутствует, то в случае скрытного полёта БПЛА более предпочтителен вариант, когда на дистанциях порядка 400 км от систем радиоуправления при сложном рельефе местности используются наземные стационарные реперные точки. Они будут включаться по кодовому сигналу от БПЛА, и работать по запросно-ответной схеме с помощью суммарно-разностного дальномерного метода предложенного в [8], но с учётом определения дальности. Рассмотрим использование предлагаемого метода навигации, при наличии реперных точек на Земле с учётом полёта БПЛА на высоте порядка 50 м по формуле [11], где L – расстояние прямой видимости [км], а h – высота полёта [м]:
 (2)
(2)
В этом случае размещение реперной точки должно лежать в радиусе от БПЛА не более чем в 25 км. Само местоположение реперной точки может быть определено с высокой точностью. Так, даже для гражданских пользователей по системе ГЛОНАСС точность наведения может составлять 2,8 метра [12]. При этом, определение местоположения реперной точки осуществляется в момент времени отсутствия помех, так как в противном случае при непрерывной постановке помех системе ГЛОНАСС на источник помех будет вначале наводится противорадиолокационная ракета или БПЛА. Доставка микромодуля определения местоположения в точку назначения может обеспечиваться через сброс с барражирующего БПЛА разведки или ракеты, или иным способом, например, при закладке микромодуля реперной точки диверсантом. Соответственно, в случае закладки микромодуля диверсантом, определение местоположения микромодуля может достигать десятков сантиметров. После доставки, микромодуль осуществляет по системе ГЛОНАСС привязку к местоположению (если точка закладки по координатам неизвестна), и далее ждёт кодовый сигнал от БПЛА, которому необходимо определение местоположения для выполнения боевой задачи. Понятно, что привязка к местности на основе реперных точек с высокой точностью может потребоваться и для выполнения народнохозяйственных задач, например, при доставке грузов. Учитывая, что мы имеем частный случай определения местоположения БПЛА на основе реперных точек, то рассмотрим его более подробно.
Вначале оценим необходимую наименьшую длительность кода для связи перед навигацией для определения местоположения БПЛА. Будем считать, что как на БПЛА, так и на микромодуле для определения местоположения желательно использование антенны с приёмом со всех сторон G=0,5 (-3 дБ), что соответствует параметрам антенны мобильного устройства Iridium. Мощность передатчика Pпрд =1 Вт (усилитель SZA 2044) как в микромодуле в реперной точке, так и в микромодуле БПЛА при частоте f =2,7 ГГц (λ=0,111 м). Тогда, при дальности D=25 км, и отношении сигнал/шум q=27 (вероятность ошибки для ФКМ сигнала 10-7 по рисунку 7, шумовой температуре Тш=600 К, здесь k – постоянная Больцмана, необходимая полоса частот устройства для возможного приёма кодового сигнала навигации (потока информации) вычисляется по формуле:
 (3)
(3)

Практически полоса пропускания в 0,1396 МГц соответствует длительности кодового сигнала порядка 10 мксек с обеспечением нужной чувствительности, что позволяет формировать коды ФКМ порядка 380-500 бит при нашей обработке в ПЛИС со скоростью 38-50 Мбит/сек. В этом случае если работают средства РТР, то при этой же полосе пропускания вероятность ошибки при выделении сигнала из шумов по амплитуде и случайной фазе будет меньше, чем 10-2 по рисунку 7. Однако, так как мы имеем псевдослучайный кодовый сигнал с длительностью символа 0,0266 мксек с полосой 38 МГц, то это ухудшает для средств РТР отношение сигнал/шум с полосой пропускания в 38 МГц ещё в 272 раза. При этом, при возможной полосе частот БПЛА от 175 МГц до 10 ГГц (а информации о том, какой БПЛА прорывает оборону и какие он использует частоты сигнала неизвестно) общее количество требуемых параллельных фильтров РТР составит порядка 264 фильтра и с учётом направленных антенн разного диапазона частот мы будем иметь внушительные массо-габаритные характеристики средств РТР. Понятно, что если средствам РТР известна априорно несущая частота, то для обнаружения сигнала возможен вариант выделения по двойной частоте Доплера в случае ФКМ сигнала. Однако при полосе пропускания фильтра для обнаружения даже в 100 кГц потребуется при параллельной обработке в полосе 38 МГц иметь 380 фильтров, а это даже больше, чем 264 фильтра при перекрытии полосы в 10 ГГц. При последовательном поиске сигнала фильтром с полосой 100 кГц в полосе 38 МГц потребуется время не менее 380×10 мксек=3,8 млсек. Для подтверждения достоверности сигнала потребуется время в 2-3 раза больше, а это 7,6-11,4 млсек. Так как время подстройки по частоте Доплера для когерентной обработки у нас не превышает 100 мксек [9], то после подстройки по коду при коде в 380 бит имеем общее время подстройки 380 бит×10 мксек+100 мксек=3,9 млсек. Но для ускорения времени подстройки по коду можно использовать изменение скорости передачи кода от бит с большой длительностью по времени до более коротких. А далее для исключения выделения сигнала по двойной частоте средствами РТР в качестве сигнала информации можно использовать ЛЧМ сигнал, так как синхронизация по времени уже обеспечена. Кроме того, после подстройки с синхронизацией по коду мы можем использовать код уже длительностью в 100 мксек в 3800-5000 бит или в 1 млсек с кодом 38000-50000 бит, что позволит снизить мощность навигационного сигнала в 10-100 раз. Более того после подстройки по коду и частоте за счёт синтезатора доплеровской частоты внутри ПЛИС с сохранением значения фазы, мы можем использовать ещё априорное смещение по частоте на 10 - 100 кГц через каждые 0,1 - 1 млсек. Иными словами вероятность обнаружения нашего сигнала даже на этапе начальной подстройки не превышает значения в 0,5. После включения режима с перестраиваемыми параметрами это вероятность практически будет равна нулю. Если этап режима первоначальной синхронизации осуществляется ещё на этапе запуска БПЛА, то возможности его обнаружения средствами РТР крайне низки и экономически невыгодны, так как средствам РТР в автоматическом режиме для принятия решения нужна повторяемость результата (регулярная составляющая). При этом, если средство РТР располагается на дальности от БПЛА в 25 км, то шум будет превосходить выделяемый сигнал и даже если средства РТР смогли выделить сигнал из шумов в течение 1 - 10 млсек, то они его потеряют, так неизвестен закон изменения параметров сигнала, по амплитуде (сигнал управления прерывается во времени), частоте и фазе. Этот закон известен только БПЛА и пункту управления. Напомним, что в ГЛОНАСС используются кодовые сигналы в 512 бит, при длительности кода в 1 млсек. Соответственно теперь, вычислим доплеровскую частоту Fд при скорости БПЛА в 250 км/час (Vбпла=69,45 м/сек) и несущей частоте f=2,7 ГГц по формуле:
 (4)
(4)
Это означает, что мы также можем использовать длительность кодового сигнала для связи БПЛА с микромодулем маркерной точки в период начала связи и отсутствия символьной синхронизации по коду как минимум в 100 мксек, что сужает полосу до 10 кГц, со снижением мощности передатчика в десять раз как в БПЛА так и в микромодуле реперной точки. Напомним, что в начальный момент связи БПЛА с реперной точкой, подстройка по частоте Доплера в нашей программе в ПЛИС может осуществляться отдельно от подстройки по коду, а это означает, что сначала может производиться захват частоты Доплера по ФАПЧ, а уж потом символьная синхронизация сначала на основе кодов с малым количеством бит, с дальнейшим переходом к большему количеству бит. После подстройки мы уже можем менять частоту по определённому закону каждые 10 - 100 мксек, например, на 10-100 кГц с изменением и без изменения кода. Это исключает регулярные составляющие для выделения средствами РТР. При этом, общая длительность кода для связи может быть увеличена до 1 млсек и более, с понижением во столько же раз мощности передатчика, что также практически исключит возможность выделения сигнала микромодуля реперной точки средствами РТР. Понятно, что микромодуль реперной точки должен включаться в момент прохождения БПЛА в данной местности, и чтобы это обеспечить, можно использовать СМС-сообщения от КА системы связи Гонец или использовать заранее определённые временные рамки включения и отключения. Кроме того, синхронизация часов БПЛА и реперной точки через систему Гонец с учётом их местоположения в данный момент времени (даже в некоторых широких пределах точности) позволит также сократить время первоначальной подстройки. При этом с целью улучшения помехозащищённости несущая частота сигналов самих СМС-сообщений также может меняться во времени по определённому закону.
Соответственно теперь необходимо рассмотреть саму схему определения местоположения по реперным точкам, так как мы предполагаем вариант подавления сигналов от ГЛОНАСС средствами РЭБ в месте пролёта БПЛА. С этой целью разберём возможные варианты навигации по [8], но с учётом использования реперных точек. Учитывая, что расстояние от реперных точек до БПЛА не превышает 25 км, то в этом случае ухудшением точности определения координат БПЛА в зависимости от несущей частоты сигнала при распространении в среде можно пренебречь. Достоинством небольшой дальности является снижение влияния среды, и тогда можно использовать одночастотный режим для навигации или использовать двухчастотный режим, но с разнесением во времени, учитывая низкую скорость БПЛА.
Таким образом, при известном местоположении трёх реперных точек и использовании запросно-ответной системы, нам известны расстояния от БПЛА до реперных точек. А отсюда строится треугольник по пересечению окружностей от известных расстояний от реперных точек до БПЛА. И это позволяет определять однозначно местоположение БПЛА, решая систему уравнений по наличию общей точки пересечения от этих окружностей. Для рассмотрения как получаются необходимые окружности, рассмотрим известный разностно-дальномерный метод, рисунок 10.
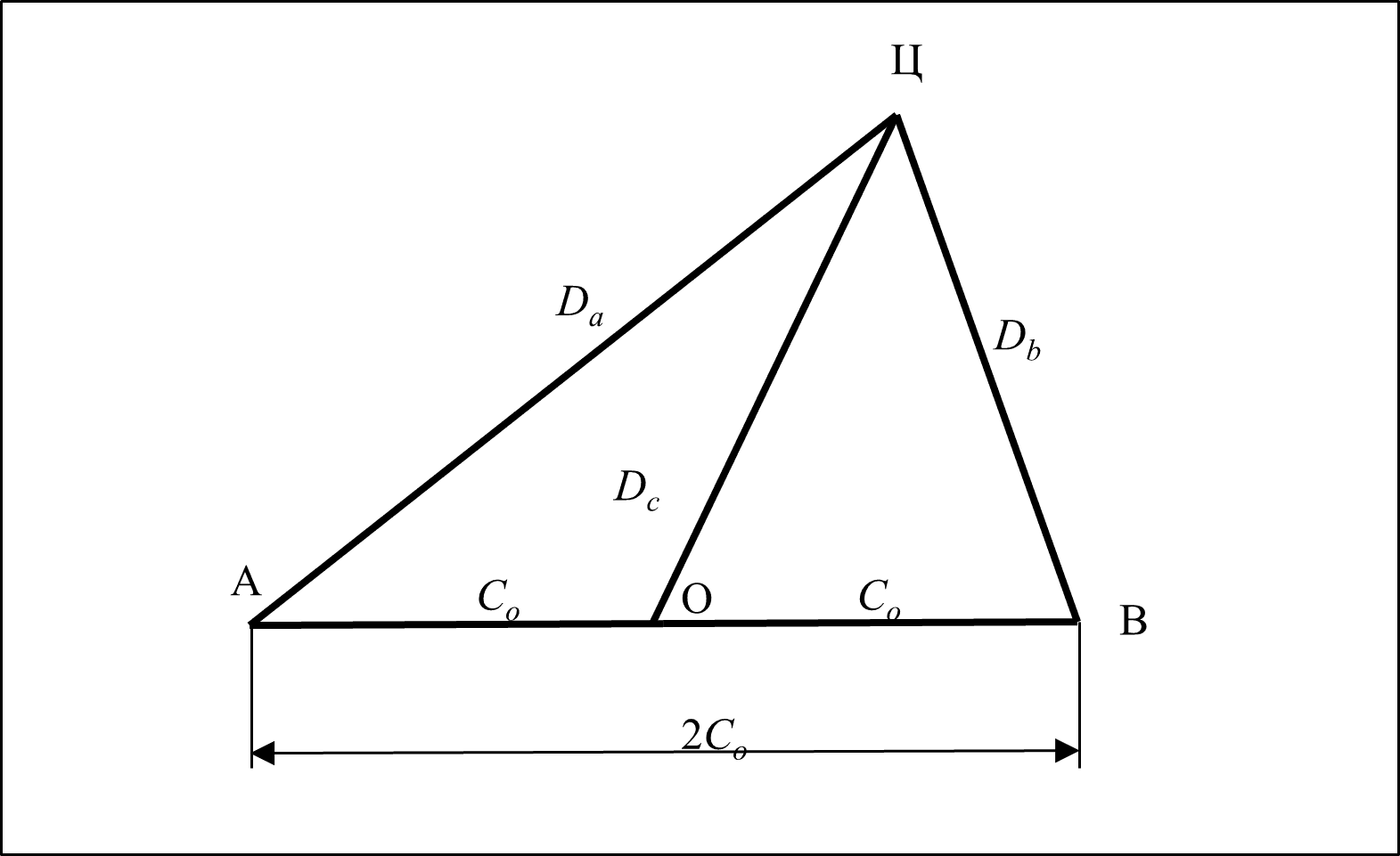
Рис. 10. Разностно-дальномерный метод
Этот метод измерения по задержкам, который является разностно-дальномерным методом, описан в [13]. Здесь измерение дальности осуществляется по формуле:
 (5)
(5)
Где: 2Со - расстояние между двумя реперными точками в метрах,  – разность дальности до БПЛА (точка Ц) между пунктами, расположенными в точке А (первая точка) и В (вторая точка), учитывающего при расчёте значение базы С0 между пунктами и время задержки
– разность дальности до БПЛА (точка Ц) между пунктами, расположенными в точке А (первая точка) и В (вторая точка), учитывающего при расчёте значение базы С0 между пунктами и время задержки  .
.  – разность дальности до БПЛА (точка Ц) между пунктами, расположенными в точка А и В, учитывающего при расчёте значение базы С0 между пунктами и время задержки
– разность дальности до БПЛА (точка Ц) между пунктами, расположенными в точка А и В, учитывающего при расчёте значение базы С0 между пунктами и время задержки  . Однако, в методе навигации по ГЛОНАСС (GPS) нам неизвестны значения
. Однако, в методе навигации по ГЛОНАСС (GPS) нам неизвестны значения  и
и  , а известно значение разности
, а известно значение разности  . В случае с двумя реперными точками нам известны все расстояния треугольника благодаря запросно-ответному методу и медиана Dc вычисляется по формуле по теореме косинусов:
. В случае с двумя реперными точками нам известны все расстояния треугольника благодаря запросно-ответному методу и медиана Dc вычисляется по формуле по теореме косинусов:
 (6)
(6)
Соответственно медиана Dc от двух реперных точек с учётом вершины треугольника в точке БПЛА даст окружность. При трёх реперных точках с известными их местоположениями мы получим одну общую точку пересечения в месте нахождения БПЛА. Однако интерес представляет сокращение реперных точек вплоть до одной реперной точки. В этом случае реперная точка как бы становится вершиной, которая ранее относилась к БПЛА, а три точки отсчёта пролёта БПЛА при замере дальности по запросно-ответной системе играют роль реперных точек, координаты которых известны относительно точки первого замера дальности за счёт автономной инерциальной системы. Иными словами нам известны точно местоположения двух точек БПЛА относительно местоположения первой точки БПЛА, а также известны дальности до реперной точки и остаётся определить местоположение первой точки замера дальности от БПЛА до реперной точки. Эта задача аналогична, решаемой выше задаче.
При использовании вместо КА НССС реперной точки на Земле, нет необходимости в синхронизации часов, благодаря запросно-ответной системе для определения дальности, когда БПЛА излучает некоторый сигнал на некоторой частоте, а реперная точка его принимает, и через известное время задержки, которое вычисляется в относительных временных единицах от приёма до начала передачи (то есть, нестабильность кварцевого генератора определяется исходя из времени обработки сигнала при приёме), излучает ответный сигнал возможно также на другой частоте и с другим кодом. Как мы отмечали выше длительность сигнала по формуле (3) может лежать в пределах от 10 мксек до 1 млсек Ткод. Время распространения от БПЛА до реперной точки не превысит Траспр=0,3 млсек (30 км). Далее мы имеем время на обработку сигнала с учётом задержки в устройстве на приём и передачу Тобр= Ткод +Т устр (при наличии подстройки) и излучается сигнал Ткод1. В итоге общее время на задержку в приёме ответного сигнала составит То-з=2× Траспр + Тобр. Величина Тобр и То-з известны, и отсюда мы вычисляем дальность от реперной точки до БПЛА. За время Ткод+ 2×Траспр=1,6 млсек, БПЛА при скорости в 250 км/час будет пройдено 0,11 метра, что можно не учитывать (в принципе эта величина может быть учтена собственной инерциальной системой БПЛА), так как точность определения местоположения самой реперной точки по ГЛОНАСС составляет 2,8 метра. Все остальные измерения связаны с БПЛА и обработкой сигнала и могут иметь ошибку измерения менее 1 метра.
Следующей задачей, которая позволит сократить экономические издержки, есть задача унификации узлов БПЛА с учётом широкого класса их применения, что позволяет делать сборную конструкцию от простого варианта к сложному варианту. На рисунке 1 приведена наипростейшая функциональная схема узла радиоуправления (микромодуль 1), которая может быть использована даже для БПЛА малых размеров. Как отмечалось выше, здесь приём сигнала для радиоуправления может лежать вплоть до 1 ГГц, например, для приёма сигналов в полосе приёма системы связи «Гонец» может использоваться в качестве усилителя промежуточной частоты (УПЧ) микросхема AD8309 от 5 до 500 МГц с коэффициентом усиления в 100 дБ. Однако само радиоуправление БПЛА может идти только с учётом данных от самого БПЛА, например его координатного положения или изображения местности. Здесь в функциональной схеме желательно было предусмотреть режим приёма и передачи как с разделением во времени, так и в дуплексном (одновременном) режиме с разделением по частотам приёма и передачи. Соответственно, чтобы принимать и передавать сигналы в дуплексном режиме необходимо иметь два синтезатора частоты, для раздельной подачи частот на аналоговый балансный модулятор и на аналоговый балансный демодулятор. При этом, так как аналоговый балансный модулятор с синтезатором частот будет использован для режима передачи информации, то подстройка по частоте Доплера для принимаемого сигнала должна осуществляться внутри самой ПЛИС. Это возможно сделать, если на АЦП будет подаваться преобразованный сигнал на промежуточной частоте порядка 20 МГц. При этом в дуплексном режиме формирование необходимой гетеродинной частоты для аналогового балансного демодулятора осуществляется по программе в самой ПЛИС с дальнейшим переносом частоты за счёт умножителя, например, на 2, если тактовая выводимая от ПЛИС частота составляет 300 МГц или на 4, если от ПЛИС подаётся тактовая частота в 150 МГц. Отметим, что использовать ещё один отдельный синтезатор частоты нет необходимости, в силу того, что дуплексный режим используется для системы «Гонец» с малой скоростью передачи информации до 19,2 кбит/сек (промежуточная частота в 20 МГц допускает передачу информации до 7 Мбит/сек). Гетеродинная частота на аналоговый балансный модулятор выбирается от сигналов от устройства управления, как и режим переключения ключей в дуплексный режим. Соответственно для показа использования функциональной схемы по рисунку 1 в многофункциональном режиме остаётся выбрать параметры усилителей, которые могут быть использованы в БПЛА малого радиуса действия с малой массой и габаритами, но с соблюдением высокой помехозащищённости канала радиоуправления. По формуле (3) при дальности в 25 км, частоте 2,7 ГГц и выходной мощности усилителя в 1 Вт, мы имели для приёма сигналов полосу пропускания в 0,1396 МГц, и это соответствует длительности кодового сигнала порядка 10 мксек с обеспечением нужной чувствительности, что позволяет формировать коды ФКМ порядка 380-500 бит при нашей обработке в ПЛИС. Однако при несущей частоте в 400 МГц, полоса пропускания (при той же вероятности ошибки) возрастёт в 45,5625 раз до 6,36 МГц. Это означает, что для БПЛА малой дальности действия для связи выгодно использовать низкие частоты до 1 ГГц. Надо отметить, что функциональная схема по рисунку 1 фактически имеет размещение радиоэлементов на одной стороне платы мобильного устройства представленного на рисунке 2. Поэтому, при размещении радиоэлементов с двух сторон микромодуль 1 по рисунку 1 может быть выполнен под одним патч с размерами 7 см×7 см. При этом мы не учитываем возможности создания всего микромодуля 1 в качестве одной общей микросхемы.
Теперь оценим возможности по передачи изображений от БПЛА, так как такие БПЛА обычно используются для разведки и уничтожения целей при наведении по изображению. В случае высокого разрешения скорость передачи от БПЛА определяется по таблице 3 [14].
Таблица 3
Уровень сложности высокого разрешения
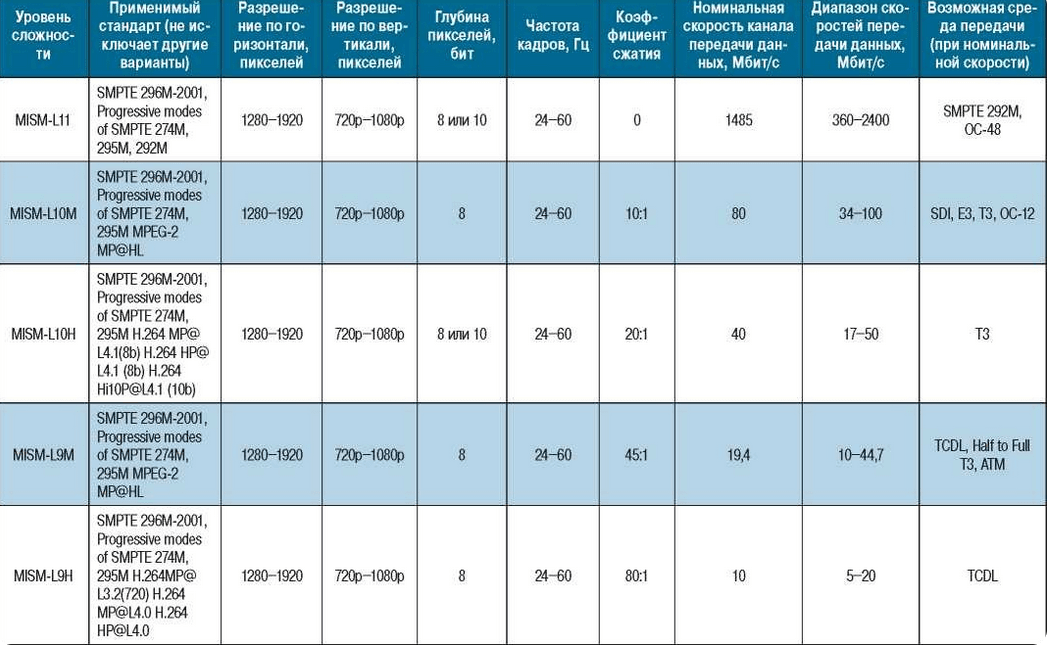
Это означает, что при несущей частоте в 0,4 ГГц для выполнения условий по MISM-L9H, требуется мощность передачи не менее 1 Вт при 5 Мбит/сек на дальности в 25 км. В этом случае известным аналогом усилителя для микромодуля 1 по рисунку 1 может быть TQP7M9103 с выходной мощностью 1 Вт, с полосой от 0,4 до 4 ГГц усилением 14,7 дБ, питанием в 5 В и потреблением тока 235 млА, или MAAM-010617 с полосой от 0,03 до 4 ГГц, питанием в 5 В, потреблением 440 млА и выходной мощностью 31 dBm, усилением 13 дБ. Но, чтобы полностью удовлетворить требованиям передачи сигнала по MISM-L9H при 20 Мбит/сек и несущей частоте в 0,4 ГГц необходимо увеличить коэффициент усиления антенн приёмо-передающего тракта с 0,5 раз (-3 дБ) до 2 раз (3 дБ), то есть в 4 раза при мощности в 1 Вт. Это вполне возможно, за счёт использования антенн, как при приёме, так и при передаче типа AO UHF (полуволновой вибратор) с круговой диаграммой направленности в горизонтальной плоскости, рабочим диапазоном от 0,4 до 0,48 МГц, полосой пропускания в 80 МГц при КСВ 1,5 и усилении 2,15 дБ (1,64 раза). При этом габариты антенны в см 50×3,5×3,5. И это даст усиление за счёт антенн в 4×2,69=10,758 раз, что позволяет расширить полосу пропускания при обеспечении необходимой чувствительности даже до 68,42 МГц. Иными словами для передачи 20 Мбит/сек можно обойтись одной антенной типа AO UHF, например, на командном пункте управления. При наличии такой же антенны на БПЛА её желательно размещать в хвостовом оперении киля, но дополнительно можно использовать и крылья с корпусом, так как штыревая антенна имеет для этого удобную конфигурацию. То есть, при двух антеннах типа AO UHF (на БПЛА и командном пункте), мы можем выполнить требования по передаче сигнала для стандарта MISM-L10М со скоростью передачи данных 50 Мбит/сек при мощности сигнала 0,73 Вт. Аналогичный результат мы можем получить за счёт повышения мощности передатчика до 8 Вт при антеннах в -3 дБ (собственно 8 Вт требуется и для связи с системой Гонец по таблице 1 и соответственно уже есть усилитель мощности в этом диапазоне частот). Действительно, по формуле (3) при дальности 25 км на частоте 400 МГц (λ1=0,75м), при мощности сигнала в 8 Вт получаем:
 (7)
(7)

Отметим, что для связи GSM ещё в 1986 году США выделили полосу в 50 МГц. В этом случае в микромодуле 1 мы используем УПЧ (ad8309) с полосой частот в 500 МГц. Кроме того микромодуль 1 может замещать бортовую радиолокационную систему картографирования «СКАТ-ЛИРА-Р», которая показана на рисунке 11.

Рис. 11. Система «СКАТ-ЛИРА-Р»
Она имеет характеристики, показанные на рисунке 12.
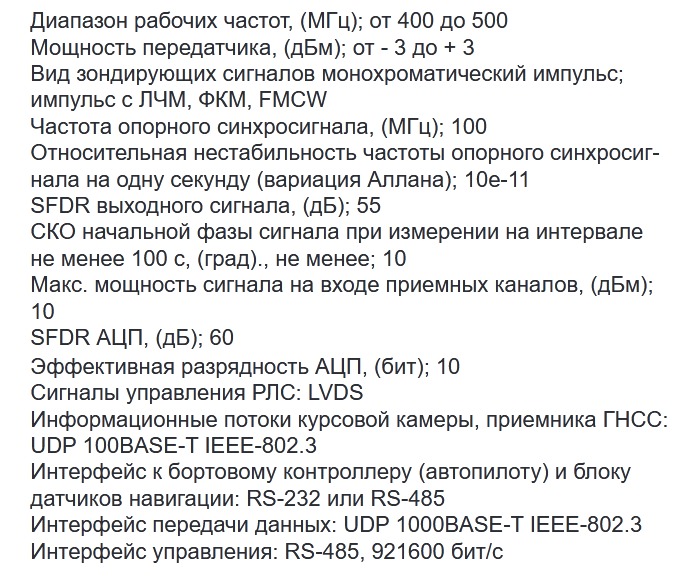
Рис. 12. Характеристики бортовой радиолокационной системы картографирования «СКАТ-ЛИРА-Р»
Отметим, что в малоразмерных БПЛА малой дальности также могут использоваться варианты для обзора местности, но с меньшим разрешением и скоростью. В этом случае для передачи изображения используется передача информации при разрешении 1920×1080 с 12 разрядным представлением пикселей. При этом за счёт сжатия 10:1 и скорости обновления изображений всего один или два кадра в секунду требуемая пропускная способность ограничивается 56-512 кбит/сек при требуемой вероятности ошибки на уровне 10-7–10-6 [14]. Отсюда мы можем снизить требования к усилителю по рисунку 1 до выходной мощности в 0,1 Вт при передаче информации в 0,636 Мбит/сек на дальности в 25 км и при несущей частоте в 0,4 ГГц и антеннах в -3 дБ. В этом случае, в качестве аналога выходного усилителя возможно использование усилителя HMC374 от 0,3 МГц до 3 ГГц с выходной мощностью в 22 дБм (0,158 Вт) усилением в 15 дБ с питанием от 2,7 до 5,5 В. Возможно также использование ADL5320 с полосой 0,4-2,7 ГГц с выходной мощностью 0,25 Вт, усилением 16 дБ с питанием 3,3 В-5 В с током потребления 44 mA-104 mA. Отсюда получается, что по рисунку 1 мы можем для передачи изображения в полосе 0,3-1 ГГц использовать вначале усилитель типа HMC374 с мощностью в 0,1 Вт. При повышении требования к качеству изображения к микромодулю по рисунку 1 на выходе усилитель HMC374 подсоединить к усилителю TQP7M9103 в полосе передачи 0,4-1 ГГц и мощностью 1 Вт. В этом случае можно передавать сигнал изображения не только в цифровом виде, но и в аналоговом виде аналогично телевизионному изображению. Надо отметить, что в [1] мы также рассмотрели возможность использования подстройки по частоте Доплера внутри ПЛИС и это обеспечивает приём сигналов со скоростью передачи информации порядка 7 Мбит/сек. Поэтому в полосе от 0,3 ГГц до 0,44 ГГц в микромодуле 1 по рисунку 1 возможен вариант использования дуплексной связи. Так в ПЛИС A3PE3000L может формироваться тактовая частота в 152 МГц, соответственно по рисунку 1 синтезатор частот от ПЛИС должен генерировать частоту в 608 МГц за счёт внешнего умножителя частоты на 4 с поступлением сигнала на балансный демодулятор ad8348. Это даёт в балансном демодуляторе ad8348 после деления на 2 необходимые частоты в 304 МГц с наличием гетеродинного сигнала по синусу и косинусу в прямом и инверсном виде. При этом, сигнал на промежуточной частоте, поступающий на АЦП может быть порядка 20 МГц при частоте входного сигнала на УПЧ (AD8310) в 324 МГц. Для формирования гетеродинной частоты в 440 МГц в синтезаторе частот от ПЛИС используется тактовая частота 228 МГц, а затем используется умножитель на 4, что даст частоту сигнала на ad8348 в 912 МГц. В балансном демодуляторе формируется частота в 456 МГц. Соответственно на АЦП будет также поступать сигнал промежуточной частоты в 20 МГц при входном сигнале на УПЧ в 436 МГц с возможной полосой пропускания в 7 МГц. Таким образом, мы имеем аналогию дуплексной связи организованной в системе «Гонец». Соответственно, микромодуль 1 по рисунку 1 может выполнять следующие функции:
- Радиоуправление БПЛА на основе джойстика с обеспечением помехоустойчивости.
- Может передавать от БПЛА изображение местности, как в цифровом, так и в аналоговом виде в дуплексном режиме с радиоуправлением, а также и в режиме раздельного приёма-передачи во времени.
- Определяет высоту полёта БПЛА с точностью до 0,1 метра.
- Позволяет при наличии автономной инерциальной системы на БПЛА обеспечить наведение на цель не по изображению и радиоуправлению, а на основе заброшенных реперных точек.
- Может использоваться для связи между абонентами в дуплексном режиме так и в режиме разделения во времени по приёму и передаче.
- Позволяет формировать помехи средствам РЭС данного диапазона частот.
- Замещать приёмопередающий тракт бортовой радиолокационной системы картографирования «СКАТ-ЛИРА-Р».
На основании выполняемых функций микромодулем 1, а также с учётом варианта микромодуля 1 с преобразованием по частоте аналогично мобильному устройству по рисунку 2, мы можем провести сравнение по характеристикам нашего устройства, с известным радиомодемом в устройстве с управлением Е2Е4 KHUKRI STEALTH, используемым для БПЛА на малых дальностях по рисунку 13.

Рис. 13. Используемый радиомодем для передачи информации в БПЛА малой дальности
Мы видим, что поток информации здесь от 0,55 Мбит/сек до 18 Мбит/сек. При этом сам БПЛА с антеннами имеет следующий вид по рисунку 14.
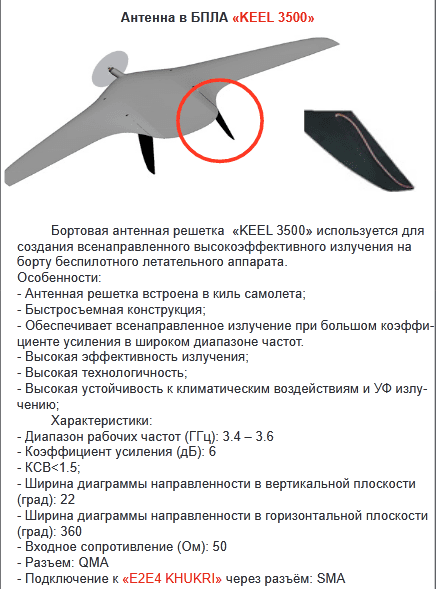
Рис. 14. Антенна БПЛА
Если исходить из габаритных размеров, то радиомодуль в виде микромодуля 1 является одной стороной платы используемой в мобильном устройстве по рисунку 2 и будет иметь размеры не более 14 см×7 см×0,5 см. То есть, он прекрасно заменит радиомодуль в устройстве Е2Е4 KHUKRI STEALTH и будет выполнять функции приёмника и передатчика. Кроме того, если рассматривать вариант с добавлением переноса частоты как в мобильном устройстве по рисунку 2, с двусторонним размещением радиоэлементов, то наше устройство позволит работать в диапазоне от 175 МГц до 500 МГц, а также и в других диапазонах от 500 МГц до 4 ГГц. Это означает, что наше устройство имеет лучшие характеристики по помехозащищённости, так как радиомодуль в устройстве Е2Е4 KHUKRI STEALTH хоть и имеет диапазон частот 3,4-3,6 ГГц, но при этом имеет полосу пропускания всего 28 МГц. В нашем варианте полоса пропускания может доходить до 50 МГц, а перестройка частоты может осуществляться от 175 МГц до 4 ГГц. При этом мы перекрываем диапазон 3,4-3,6 ГГц и антенна диапазона 0,4-0,48 ГГц может встраиваться в БПЛА отдельно и независимо, так как имеет штыревой вид.
Однако для сравнения с нашим вариантом проведём расчёт полосы пропускной способности при заданной чувствительности для варианта радиомодуля устройства Е2Е4 KHUKRI STEALTH при мощности в 0,3 Вт, коэффициенте усиления антенны БПЛА в 6 дБ (3,98 раз), коэффициенте усиления антенны наземного пункта БПЛА в 9 дБ (7,94 раза) при несущей частоте в 3,4 ГГц (λбпла=0,0882 м), на дальности в 25 км, по формуле (8):
 (8)
(8)

Это означает, что для приёма в заявленной полосе для шумоподобного сигнала (ФКМ) в 7 МГц (максимально используемый код будет в 13 бит для 0,55 МГц), мы должны снизить дальность до 17,3 км или необходимо поднять мощность сигнала с 0,3 Вт до 0,626 Вт или увеличить коэффициент усиления антенны в командном пункте управления в 2 раза. Здесь в целях корректного сравнения устройств мы пока не учитываем улучшения отношения сигнал/шум, за счёт накопления кода, а также улучшения при этом помехозащищённости. В системе GPS для военных целей используется код в 10000 символов вместо 1000 символов как в гражданском варианте. Напомним, что в нашем устройстве при частоте в 0,4 ГГц, дальности 25 км, мощности передатчика в 1 Вт и антеннах по -3 дБ мы имели полосу пропускания в 6,36 МГц. Однако при использовании антенн, как при приёме, так и при передаче типа AO UHF при их усилении 2,15 дБ (1,64 раза) получаем дополнительное усиление в 10,758 раз, что позволяет расширить полосу пропускания при обеспечении необходимой чувствительности до 68,4 МГц при мощности в 1 Вт. Если мы будем исходить из передачи кода сигнала не 7 Мбит/сек, как в радиомодуле устройства Е2Е4 KHUKRI STEALTH, а 38 Мбит/сек (уменьшение полосы в 1,8 раза по сравнению с полосой 68,4 МГц), то мы можем снизить мощность передатчика с 1 Вт до 0,555 Вт, что сравнимо с мощностью передатчика в 0,626 Вт устройства Е2Е4 KHUKRI STEALTH на дальности в 25 км. При этом наш код в случае передачи информации в 550 кбит/сек будет составлять 69 бит. Иными словами мы имеем выше помехозащищённость по коду в 5 раз, только благодаря возможности расширения полосы пропускания при той же чувствительности. При этом мы, как было отмечено в работе [9] имеем быструю подстройку по частоте за 100 мксек для получения когерентной обработки, и это даёт возможность перестраивать параметры за короткое время.
Оценим теперь эффективность введения режимов QPSK и QAM в устройстве Е2Е4 KHUKRI STEALTH. В режиме QPSK 1/2 (π/2) в устройстве Е2Е4 KHUKRI STEALTH наблюдается снижение чувствительности по сравнению с режимом ШПС (шумоподобный сигнал аналогичный ФКМ) от -105 дБм до -88 дБм, то есть на 17дБ. Потери от самого режима QPSK 1/2 (π/2) как это видно из рисунка 6 составляют 3 дБ (2 раза). При этом скорость передачи информации возрастает от 0,55 Мбит/сек до 4,5 Мбит/сек. Если бы мы просто увеличили бы скорость от 0,55 Мбит/сек до 4,5 Мбит/сек в режиме ФКМ (ШПС) без учёта кода, что даёт расширение полосы пропускания в 8,18 раз (9,13 дБ), то потери по чувствительности с учётом потерь от режима QPSK 1/2 (π/2) были бы в 12,25 раз (10,87 дБ). Отсюда видно, что использование кода даёт выигрыш 6,13 дБ (4,1 раз). Следующий режим QPSK 3/4 (π/4) должен был бы дать скорость передачи информации до 9 Мбит/сек, но он даёт 6,75 Мбит/сек, при этом потери также возрастают в 2 раза (3 дБ). То есть выигрыш по скорости передачи по сравнению с режимом QPSK 1/2 (π/2) будет всего в 1,5 раза, с ростом потерь в 2 раза. В режиме ФКМ увеличение скорости передачи информации в 2 раза сопровождалось бы такими же потерями в 2 раза. То есть использование режима QPSK 3/4 (π/4) даёт проигрыш с обычным расширением полосы в 1,3 раза. Для режима QAM 16 ситуация ещё хуже при скорости передачи в 9 Мбит/сек, что лучше по скорости передачи режима QPSK 3/4 (π/4) в 1,33 раза, мы имеем потери чувствительности до -81 дБм, то есть хуже режима QPSK 3/4 (π/4) в 2,5 раза (4 дБ). Для QAM 64 мы имеем увеличение скорости передачи до 18 Мбит/сек по сравнению с режимом QAM 16, но при этом потери возрастают в 6,3 раза (8 дБ). Итого, при максимальной скорости передачи информации в режиме QAM 64 для устройства Е2Е4 KHUKRI STEALTH, которая составляет 18 Мбит/сек при полосе 7 МГц мы имеем падение чувствительности от -105 дБм при ШПС до -73 дБм, то есть на 32 дБ (1584 раза) при этом скорость передачи возрастает только в 32,77 раза. Для ФКМ сигнала при передаче 18 Мбит/сек без кодов потери составили бы 15 дБ (32,7 раза), то есть линейный режим между ростом скорости передачи и потерями. Иными словами использование режима QAM 64 увеличивает потери в 48,44 раз по сравнению с режимом обычного расширения полосы за счёт ФКМ сигнала! Отсюда следует, что предлагаемый в устройстве Е2Е4 KHUKRI STEALTH способ увеличения скорости передачи информации не является оптимальным и требуется предложить устройство с более оптимизированными радиотехническими параметрами.
Выше мы показали, что при дальности в 25 км с полосой в нашем случае в 38 МГц и полосой в 7 МГц для устройства Е2Е4 KHUKRI STEALTH мы имеем мощности передатчиков 0,555 Вт и 0,626 Вт соответственно. То есть, мы имеем равную чувствительность при передаче сигнала, у нас она - 38 Мбит/сек, а в устройстве Е2Е4 KHUKRI STEALTH - 7 Мбит/сек. Понятно, что уже мы имеем выигрыш по скорости передачи в 5,42 раза. Однако, для удовлетворения максимальной скорости при передаче данных по стандарту MISM-L10M от 34 Мбит/сек до 100 Мбит/сек (таблица 3) нам также потребуется использовать режим QAM (рисунок 15) с увеличением энергопотенциала для компенсации потерь.

Рис. 15. Выделение сигнала QAM в ПЛИС при сдвиге по частоте Доплера в 23 кГц с общим потоком в 114 Мбит/сек
Для QPSK 1/2 (π/2) считаем что потери возрастают в два раза. Это видно по рисунку 6 за счёт того, что уровни сигнала не как в BPSK, например, от +1 В до -1 В, а от 1 В до 0 В, или от 0 В до -1 В. Для увеличения разрешения по амплитуде при АМ модуляции также требуется увеличить амплитуду сигнала, например с 1 В до 2 В, и это также потребует увеличение энергопотенциала в 2 раза. Отсюда, для QAM сигнала требуется увеличить энергопотенциал, либо за счёт коэффициента усиления приёмной антенны командного пункта ещё в 4 раза (6 дБ), либо увеличить мощность передатчика БПЛА с 0,555 Вт до 2,2 Вт. Для этого можно использовать суммирование от двух усилителей мощности по 1 Вт типа TQP7M9103 с полосой 0,4 до 4 ГГц. Таким образом, сужение полосы пропускания со 114 МГц до 38 МГц в 3 раза, приведёт к возрастанию потерь в 4 раза с ухудшением по сравнению с обычным вариантом расширения полосы в 1,33 раза. Но, выигрыш нашего варианта QAM по сравнению с вариантом QAM 64 в устройстве Е2Е4 KHUKRI STEALTH будет в скорости передачи информации в 6,3 раза. При этом проигрыш в мощности для режима QAM 64 даже в сравнении с режимом QPSK 3/4 (6,75 Мбит/сек) равняется 12 дБ (15,85 раз) и здесь ухудшение по потерям будет в 2,66 раз.
Понятно, что использование режима QAM не имело бы смысла с точки зрения роста энергетических потерь, если бы простым уменьшением длительности бита информации, при расширении полосы пропускания, можно было бы добиться желаемой скорости передачи информации по изображениям вплоть до 150 Мбит/сек. Однако тут есть ограничения, связанные с тем, что по теореме Котельникова, с учётом того, что длительность тактового импульса при цифровой дискретизации не равна нулю, как показано нами в [9], требуется не менее трёх тактов на символ. Отсюда, тактовая частота дискретизации должна быть не менее 450 МГц при приёме 150 Мбит/сек. Так как при росте частоты обработки сигнала по линейному закону энергетические потери возрастают в квадрате, то существует приемлемое ограничение длительности импульса символа и тактовой частоты дискретизации, которое обеспечивает выполнение задач не только по передачи изображения, но и по определению местоположения объекта и разрешающей способности при радиолокационном картографировании. В этом случае оптимальной величиной является тактовая частота дискретизации порядка 120-150 МГц с длительностью импульса порядка 25 нсек - 20 нсек. Именно из такого соотношения выбирались радиопараметры нашего микромодуля 1 по рисунку 1 и мобильного устройства по рисунку 2. Понятно, что исходя из характеристик, представленных на рисунке 12 радиомодуль в устройстве Е2Е4 KHUKRI STEALTH для БПЛА не имеет оптимизацию. Это и привело к тому, что потребовался вариант QAM64, который используется при больших энергетических потерях и даёт всего лишь 18 Мбит/сек против наших 114 Мбит/сек. Казалось бы, что добиться увеличения скорости передачи можно за счёт многочастотного режима, однако в этом случае вместо энергосберегающего нелинейного режима класса «В» в усилителях мощности с коэффициентом полезного действия (к.п.д) в 78% придётся использовать линейный режим класса «А» с к.п.д 48% [15]. То есть линейный режим в усилителях мощности даёт энергетические потери в усилителях мощности больше в 1,625 раз. Напомним, что режим QAM в нашем случае уступает варианту увеличению скорости передачи за счёт расширения полосы только в 1,33 раза по энергетическим потерям. Таким образом, в нашем случае сужение полосы пропускания за счёт режима QAM увеличивает не только скорость передачи информации, но и сокращает энергетические потери в 2 раза по сравнению с устройством Е2Е4 KHUKRI STEALTH. Следовательно, использование микромодуля 1 по рисунку 1 по сравнению с устройством Е2Е4 KHUKRI STEALTH даёт выигрыш за счёт:
- снижения несущей частоты и унификации используемых устройств;
- использования простой QAM модуляции с увеличением скорости передачи при снижении потерь, и параметры сигнала имеют оптимизацию и обеспечивают многофункциональное применение;
- повышения помехозащищённости благодаря невозможности использования узконаправленных антенн РЭБ при несущих частотах ниже 1 ГГц, а также из-за быстрой перестройки параметров сигнала;
- исключения конструктивного недостатка расположения хвостового оперения БПЛА вниз, а не вверх, что позволяет обеспечивать посадку БПЛА. Это связано со сложностью обеспечения широкой направленности при несущих частотах в 3,4-3,6 ГГц, так как излучающие элементы имеют малые размеры, что снижает чувствительность, и требуется их большое количество, но это даёт узкую направленность от суммирования сигналов.
Таким образом, для получения оптимального варианта микромодуля 1 по рисунку 1 наряду с усилителем HMC374 можно использовать суммарный сигнал от 2-х усилителей TQP7M9103, при требовании повышенного качества изображения с передачей информации в 114 Мбит/сек или установить разработанный вариант усилителя в 2,5 Вт в диапазоне от 0,4 ГГц до 1 ГГц. Отметим, что известен усилитель мощности АР561 на 8 Вт в диапазоне от 0,7 ГГц до 2,7 ГГц, что позволяет компенсировать потерю чувствительности в 3,6 раза за счёт перехода на частоту в 0,76 ГГц от частоты в 0,4 ГГц за счёт мощности. При этом длина полуволнового вибратора сокращается в 1,9 раза с 50 см до 26,2 см. Также возможно использование стандартной антенны GSM ESC-GSM-05 SMA-M с размерами 115 мм×22 мм×4 мм для частоты 0,9 ГГц/1,8 ГГц с коэффициентом усиления 2,5 дБ, что обеспечивает аналогичную чувствительность на несущей частоте 0,897 ГГц.
Если используется скорость передачи информации в 38 Мбит/сек, то достаточно и одноваттного усилителя, и здесь используется внешняя подстройка по частоте Доплера без обработки внутри ПЛИС, так как промежуточная частота в 20 МГц меньше, чем скорость передачи информации. Отметим, что при промежуточной частоте в 20 МГц в режиме системы Гонец подключение антенны с необходимыми фильтрами для дуплексного режима и малошумящим усилителем к соответствующим входам-выходам осуществляется ключевой схемой через устройство общего управления.
Отметим ещё раз, что для БПЛА ближнего радиуса действия вариант перехода на частоты в 3,4-3,6 ГГц проигрывает варианту частот от 300 до 500 МГц по скорости передачи информации и потерям в мощности, и не обеспечивает многофункциональности. Для диапазона частот от 300 до 500 МГц легче обеспечить всенаправленную антенну с разным размещением её на БПЛА, а микромодуль 1 этого диапазона частот позволяет замещать функции, таких систем как «Гонец», приёмопередающего тракта бортовой радиолокационной системы картографирования «СКАТ-ЛИРА-Р», выполнять функции радиовысотомера. Более того, использование дополнительного переносчика частоты в область частот 1-4 ГГц, как это сделано в мобильном устройстве по рисунку 2 даёт возможность принимать сигналы GPS и ГЛОНАСС, а также замещать сам радиомодем для устройства Е2Е4 KHUKRI STEALTH. Программа в ПЛИС в микромодуле 1 обеспечивает быструю подстройку по частоте, что по времени не даёт средствам РТР определить наличие сигнала из-за перестройки по несущей частоте и смене кода и прерывистости сигнала. То есть, благодаря запросно-ответной системе, большой скорости передачи информации средства РТР не могут выделить регулярную составляющую, на основании чего и формируется помеха. Кроме того, диапазон частот от 300 до 400 МГц не позволяет создать направленную антенну с большим коэффициентом усиления для помех на БПЛА. Режим использования уплотнения сигнала за счёт режима QAM у нас обеспечивает выигрыш в 6 раз с уменьшением энергетических потерь в 2 раза. Отсюда следует вывод, что мобильное устройство с возможностью переноса частоты по рисунку 2 и с использованием микромодуля 1 по рисунку 1 является более перспективным устройством, чем радиомодем на устройстве Е2Е4 KHUKRI STEALTH на 3,4-3,6 ГГц.
Понятно, что выпуск радиоэлектронных компонентов в диапазоне частот от 0,3-1 ГГц, а также изготовление ПЛИС в 130 нм не являются критичными параметрами для освоения нашей промышленностью, и здесь естественно надо разработать оптимальные величины с привлечением специалистов в этой области.
Соответственно теперь необходимо определиться с требованиями к БПЛА дальнего радиуса действия с наведением на цель и источник помех. Отметим, что наведение на цель БПЛА ближнего радиуса действия обычно осуществляется по изображению, для БПЛА дальнего действия такой вариант не всегда возможен при движении БПЛА на малых высотах. Понятно, что микромодуль 1 по рисунку 1 не в состоянии выполнить функции по наведению на радиоэлектронные средства противника (возможно только с использованием триангуляционных методов с помощью нескольких БПЛА), и как отмечено выше, он не может принимать сигналы от навигационной системы ГЛОНАСС в силу того, что это требует расширения диапазона принимаемых сигналов на основе мобильного устройства по рисунку 2. Собственно можно обойтись уже готовым навигатором GPS (ГЛОНАСС), однако данный навигатор не обладает помехоустойчивостью и его параметры в силу непрерывного излучения сигнала навигации от КА легко определяются средствами РТР и создаются эффективные помехи. Поэтому для улучшения помехозащищённости системы навигации было предложено в [8] использование низкоорбитальных спутниковых систем связи (НССС) с оптимизацией радиотехнических параметров в группировке 98 КА с многофункциональным использованием. Однако данный проект не получил поддержки и не было обеспечено финансирование даже пилот-проекта. Отсюда, на данном ближайшем этапе выбора требований, использование микромодулей для переноса частоты, помимо режима помехозащищённости, канала радиоуправления может рассматриваться в качестве устройств создания помех и наведения на источник излучения. При этом, как было показано выше, возможен вариант определения местоположения на основе использования реперных точек с дальностью до 400 км с высокой помехоустойчивостью. При использовании промежуточных БПЛА в полёте, дальность управления, с определением местоположения, может быть значительно увеличена. Соответственно теперь надо определиться с функциональными схемами для модулей переноса частоты от одного до десятков ГГц с учётом конструкций антенных блоков осуществляющих обеспечение режима наведения. То есть, разделение функциональных схем преобразователей частоты при оптимизации связано с использованием режима наведения в широком диапазоне частот. Рассмотрим вначале микромодуль переноса частоты от 1 ГГц до 2,7 ГГц, так как в этом диапазоне находятся несущие частоты как для GPS (ГЛОНАСС), так и частоты для таких систем как Iridium, Globalstar и других средств связи типа GSM. Следует отметить, что для приёма сигналов GSM до 1 ГГц может использоваться антенна Тракт Х800 с параметрами по рисунку 16.
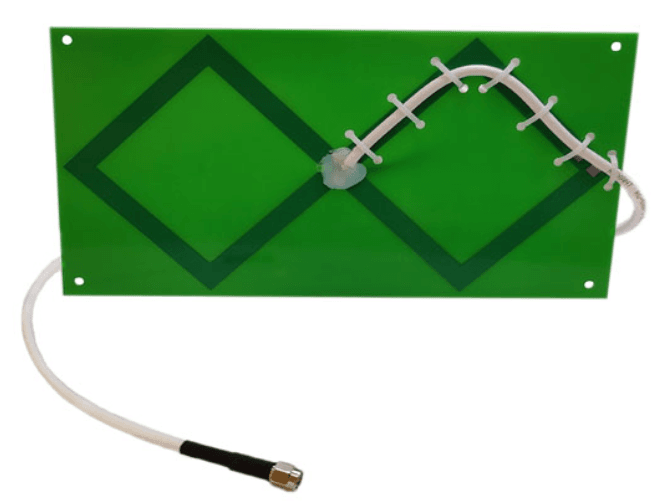
Рис. 16. Вид антенны Тракт Х800
Ниже в таблице 4 приведены параметры такой антенны, которая может также использоваться и для работы радиовысотомера при использовании нашего устройства с ЛЧМ сигналом в полосе до 150 МГц. Практически это означает, что при частоте выше 1 ГГц можно использовать патч антенны.
Таблица 4
Параметры антенны Тракт Х800

В [1] мы показали, что перенос частоты в область несущих частот ГЛОНАСС (GPS) обеспечивает возможность радиоуправления в полосе Fпрми=2,5 МГц на дальности в 400 км на частоте fи =1,57542 ГГц (длина волны λи=0,19м) при мощности передатчика Pпрди=3,2 Вт. При этом приёмная антенна БПЛА имеет коэффициент усиления антенны Gпрми=Gаб=1.995 (3 дБ при размерах патч λи/2≅0,095м). Соответственно антенна терминала управления состоит из 4-х патч с коэффициентом усиления 14,5 дБ аналогично антенне [7]. Отличие лишь в том, что мы для обеспечения наведения на источник излучения в данном диапазоне частот будем использовать отдельное подсоединение каждого патч к приёмо-передатчику с целью управления лучом АФАР. Понятно, что увеличение мощности передатчика как в БПЛА, так и в терминале управления с 3,2 Вт до 8 Вт позволит расширить полосу до 6,25 МГц, что обеспечит на такой дальности в 400 км приём даже телевизионных изображений от БПЛА. Однако если использовать антенну из 4-х патч также и на БПЛА с коэффициентом усиления в 14,5 дБ, то тогда мы можем расширить полосу принимаемых сигналов до 56,8 МГц. А это позволит уже передавать изображение в цифровом виде с высоким разрешением. При этом на дальности в 400 км от БПЛА появляется возможность использовать ещё один или несколько БПЛА или ЛА в качестве реперных точек по методу, предложенному выше по запросно-ответной системе с вычислением дальности. В этом случае точность местоположения координат этих БПЛА, которые используются в качестве реперных точек, может доходить до 0,1 м, так как они могут привязываться к реперной точке наземного базирования, координаты которой известны с точностью даже менее 0,1 метра. Управление лучом АФАР состоящих из 4-х патч обеспечит угол сканирования в ±60 градусов, что позволит, меняя положение и направление полёта БПЛА с увеличением точек замера, достичь точность определения местоположения ведомого БПЛА до 0,1 метра с учётом режима накопления по амплитуде за счёт сплайнов. Соответственно, так как используется запросно-ответная система, то может быть использовано изменение кода, а также изменение частоты во времени, что также повышает помехозащищённость и обеспечивает скрытность сигналов как от БПЛА, так и на БПЛА. Понятно, что конструкция АФАР из 4-х патч позволяет при сканировании лучом наводиться на источник сигнала РЭС противника в данном диапазоне частот. Рассмотрим общий функциональный вид микромодуля преобразователя частоты с нескольких ГГц в область ниже 1 ГГц, с учётом использования определения направления на источник излучения за счёт углового сканирования через управление фазами, поступающими на патч на рисунке 17.
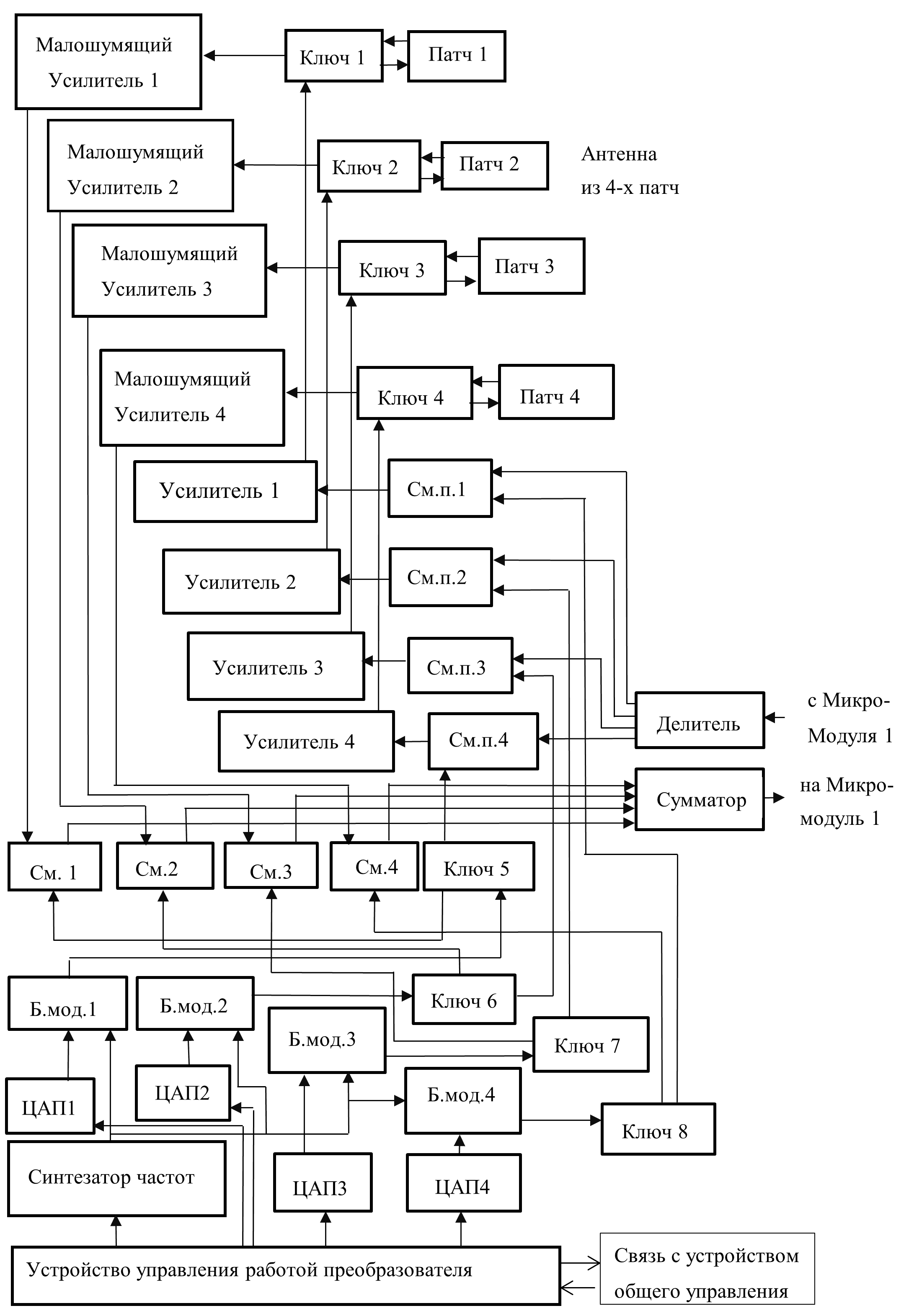
Рис. 17. Микромодуль преобразователя частоты
В данной функциональной схеме микромодуля преобразования частоты не указано управление ключами от устройства управления работой преобразователя. При этом аналоговые балансные модуляторы (Б.мод) могут быть заменены фазовращателями в зависимости от того какие характеристики лучше в данном диапазоне частот. При приёме сигналы с патч 1-4 через ключи 1-4 поступают через малошумящие усилители 1-4 и далее на смесители (см.1-4). На вторые входы приёмных смесителей через ключи 5-8 поступает гетеродинный сигнал с учётом соответствующих сдвигов по фазе для углового сканирования. Для сдвига по фазе гетеродинного сигнала от синтезатора частоты используется аналоговый балансный модулятор, который управляется через цифро-аналоговые преобразователи (ЦАП1-4) за счёт значений от устройства управления работой преобразователя. Аналогично работает передающий канал с использованием усилителей мощности за счёт переключения режима приёма на передачу через соответствующие ключи. При этом передаваемый сигнал со смесителей вверх (См.п.1-4) поступает через делитель от микромодуля 1. Соответственно принимаемый сигнал также со смесителей вниз (См.1-4) поступает через сумматор на микромодуль 1. В качестве делителя и сумматора на 4 в диапазоне от 1 до 400 МГц, а именно в эту полосу будет происходить преобразование, можно использовать Splitter/Combiner SCP-4-1.
Использование патч должно подразумевать применение как вертикальной, горизонтальной, так и круговой поляризации. Это осуществляется за счёт конструкции патч с соответствующим подключением. Например, на рисунке 18 показана конструкция патч с линейной поляризацией.
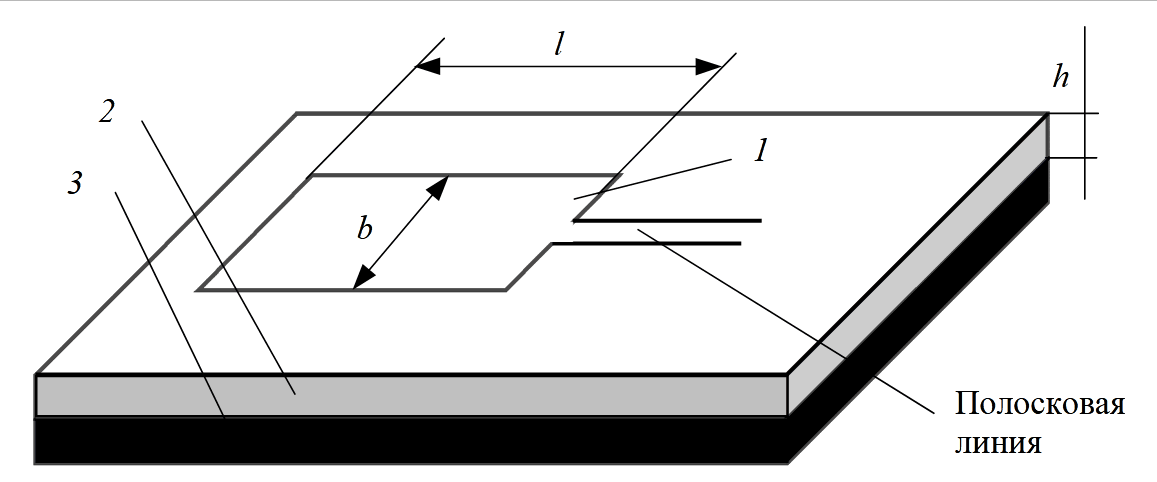
Рис. 18. Патч с линейной поляризацией
Здесь введены следующие обозначения: 1 – ленточный проводник; 2 – диэлектрический слой высотой h; 3 – проводящая подложка; l=b=λ/2 – половина излучаемой длины волны в диэлектрике.
Для получения поля вращающейся поляризации необходимо обеспечить две пары излучающих щелей, расположенных перпендикулярно друг к другу и возбуждаемых со сдвигом 90о. С этой целью выбирают квадратичный излучатель, возбуждаемый в двух точках в середине соседних перпендикулярных друг к другу сторон ленточного проводника. В этом случае у нас возникает требование по использованию для АФАР двух функциональных схем по рисунку 17 для возбуждения в двух точках в середине соседних сторон ленточного проводника. Соответственно здесь возможно использование общего синтезатора частот с общим устройством управления работой преобразователя, а также общими делителями и сумматорами, либо можно использовать две отдельные функциональные схемы по рисунку 17, а для когерентности надо предусмотреть схему ФАПЧ для подстройки синтезаторов частот. Схема ФАПЧ для синтезаторов частот может быть полезна и для модульной конструкции формирования АФАР с большим коэффициентом усиления. При этом схема ФАПЧ здесь может быть упрощена за счёт одного фазового детектора (ФД) и простого АЦП (AD4002 с мощностью потребления 70 мкВт) или типа LTC2256-14 (при полосе в 25 Мбит/сек при 14 битах разрешения по амплитуде, питании 1,8 В и потребляемой мощности 35 млВт), сигналы с которого будут поступать на устройство управления работой преобразователя, либо на устройство управления микромодуля 1. В этом случае сигналы на ФД поступают с двух функциональных схем преобразователей частоты от двух балансных модуляторов этих схем, и проводится изменение фазы на одном из двух балансных модуляторов до достижения нуля на выходе ФД. При этом синтезаторы частот имеют когерентность за счёт подачи сигнала от одного общего кварцевого генератора (например, ГК365-С с диапазоном частот от 1 МГц до 125 МГц) на все функциональные схемы через устройства управления. Такой метод позволяет осуществлять быстро перестройку частоты синтезаторов с соблюдением когерентной обработки. Понятно, что преобразователи частоты могут использоваться в очень широком диапазоне частот от 1 ГГц до десятков ГГц. Для частот порядка десятков ГГц вместо патч могут использоваться щелевые излучатели и вместо планарного размещения элементов (плата параллельна полотну АФАР) возможно слотовое подключение модулей (плата перпендикулярна полотну АФАР). Ясно, что теперь нам надо определиться с возможной элементной базой для реализации указанного модуля преобразования частоты на начальном этапе до создания оптимальных радиокомпонентов (некоторые типы элементов мы уже указали выше). Из известной иностранной базы элементов для синтезатора частоты для микрополосковых АФАР подходит ADF4350, который формирует частоты от 137,5 МГц до 4400 МГц. В качестве балансного модулятора можно использовать на этапе эксперимента AD8349 с полосой рабочих частот от 700 МГц до 2,7 ГГц, что обеспечит преобразование входных сигналов в полосу 0,5 ГГц на микромодуль 1 при входной частоте принимаемого сигнала до 3,2 ГГц. Класс понижающих смесителей (См.1-4) на рисунке 17 достаточно широк, однако в нашем случае при сбросе сигнала в полосу 0,5 ГГц перспективным является вариант смесителя типа LT5557 с преобразованием входного сигнала от 0,4 – 3,8 ГГц. Повышающие смесители (См.п.) по рисунку 17 можно выполнить на смесителе LT5579, который обеспечит перенос частоты из области 0,4 ГГц в область выходной частоты от 0,4 до 3,1 ГГц. В качестве МШУ при эксперименте можно использовать усилитель MGF4921AM с малым коэффициентом шума 0,35 дБ, но он работает в узком диапазоне частот от 2 ГГц до 4 ГГц и усилением в 13 дБ. Поэтому больше подходит МШУ НМС753 в полосе от 1 ГГц до 11 ГГц с усилением в 16,5 дБ (от 1 до 6 ГГц) при шуме в 1,5 дБ. В качестве усилителя мощности в модуле преобразования частоты по рисунку 17 можно использовать МААМ-009286 с мощностью до 500 млВт в полосе от 0,4 – 4 ГГц, с питанием в 5 В и током в 155 млА. В этом случае, при четырёх патч АФАР с условием питания каждого патч от двух усилителей мощности для получения круговой поляризации, мы будем иметь общую мощность АФАР в 4 Вт. Однако для удовлетворения требованию связи для передачи изображения в цифровом виде в полосе до 56,8 МГц на дальности в 400 км на частоте fи =1,57542 ГГц нам требуется общая мощность от АФАР в 8 Вт. С целью достижения необходимого общего энергопотенциала при 4 Вт от излучающего АФАР необходимо использование в приёмном терминале АФАР в барражирующем БПЛА связи 8 патч. То есть, как бы две приёмные антенны из 4-х патч объединённые вместе для приёма изображения. Ещё раз отметим, что известен усилитель мощности TQP7M9103 мощностью 1 Вт от 0,4-4 ГГц с питанием в 5 В и током потребления 235 млА и усилением 16 дБ. В этом случае не требуется использовать в приёмном терминале командного пункта АФАР на 8 патч, достаточно 4-х патч. В качестве делителя сигнала от синтезатора частоты гетеродинного сигнала можно применить известный телевизионный делитель ЕКТ-2504А с полосой от 5-2500 МГц, или его аналог Power Splitter/Combiner WP4R1+ с полосой от 2-3 ГГц, которую желательно расширить до 1-4 ГГц. Устройство управления работой преобразователя частоты может быть выполнено на ПЛИС A3P250, и здесь не требуется высокая тактовая частота. Ключи могут быть выполнены на микросхеме SKY13290 до 2,5 ГГц или на микросхеме HMC284MS8G до 3,5 ГГц. При этом устройство управления подаёт сигналы на ЦАП AD1853 с быстродействием 192 кбит/сек с разрядностью 24 бит. Отметим, что данная конфигурация подразумевает непосредственное подключение антенны к модулю преобразования частоты по рисунку 17, а от него на микромодуль 1 по рисунку 1.
Соответственно, чтобы обеспечить многофункциональность на БПЛА дальнего действия необходимо предусмотреть такое расположение АФАР, чтобы обеспечить функции наведения, постановки помех, определения местоположения и высоты полёта БПЛА, передачи изображения и другой полезной информации. Например, как уже отмечалось выше, диапазон в районе десятков ГГц может использоваться в БПЛА для наведения по сигналам от терминалов Starlink и OneWeb, а также для постановки помех этим системам и КА дистанционного зондирования земли TerraSar-x. Сама функциональная схема модуля приёмо-передатчика АФАР Х – диапазона (TerraSar-Х) без преобразования частоты представлена на рисунке 19.
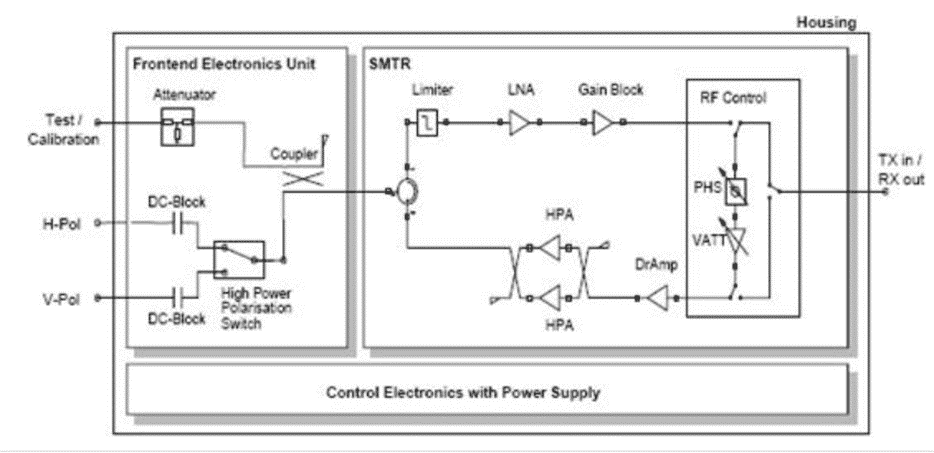
Рис. 19. Приёмо-передающий модуль АФАР Х-диапазона
Здесь средняя частота 9,6 ГГц, рабочая полоса 150 МГц. Щелевая антенна имеет как вертикальную (V-Pol), так и горизонтальную поляризацию (H-Pol), которые переключаются через ключ (High Power Polarisation Switch). Для калибровки предусмотрен направленный ответвитель (Coupler) с аттенюатором (Attenuator). Далее используется циркулятор СВЧ который разделяет каналы приёма и передачи. В канале приёма стоит ограничитель (Limiter), далее малошумящий усилитель (LNA) c шум-фактором 4,8 дБ, после МШУ стоит блок усиления (Gain block), что даёт усиление приёмного тракта на 15-30 дБ. Через ключ принимаемый сигнал поступает на фазовращатель (PHS) и далее на регулируемый усилитель (VATT). После регулируемого усилителя через ключ принимаемый сигнал поступает на выход. Сигнал на передачу поступает на модуль также как принимаемый сигнал, через ключ на фазовращатель. Далее, передаваемый сигнал через регулируемый усилитель и ключ поступает через предусилитель на два усилителя мощности (HPA) перед которыми происходит деление сигнала на два, а после усилителей мощности их суммирование до 8 Вт. После чего передаваемый сигнал поступает на циркулятор СВЧ. Отдельно в модуле предусматривается электронное управление с питанием (Control Electronics with Power Supply). Вид конкретного модуля показан на рисунке 20.
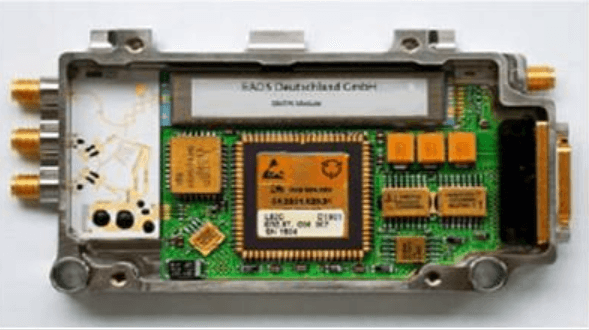
Рис. 20. Вид конкретного модуля СВЧ АФАР Х-диапазона.
Понятно, что недостатком представленной функциональной схемы является то, что используется циркулятор СВЧ, который сужает полосу пропускания. Применение фазовращателя непосредственно в цепи приёмо-передающего тракта может быть оправдано для многоэлементной АФАР с коэффициентом усиления под 40 дБ, но для АФАР БПЛА требуется коэффициент усиления не более 20 дБ, и мощность выходного усилителя на один щелевой излучатель также может быть снижена до уровня 1 Вт. Кроме того, после приёмо-передающего модуля необходима схема общего сумматора и разветвителя, что при частоте в 9,6 ГГц даёт большие потери, если будет выполняться в микрополосковом варианте. В этом случае предпочтителен вариант модуля с преобразованием частоты по рисунку 17, где используется ключ 1 для переключения приёмо-передачи вместо циркулятора и происходит преобразование частоты в область порядка 400 МГц, что снижает потери для сумматора и разветвителя в микрополосковом варианте для приёмного и передающего каналов. При этом фазовращатель (Фазовр.) используется в канале сигнала гетеродинной частоты, который поступает через ключ 2 на смеситель передатчика (См.п) или смеситель приёмника (См.) по рисунку 21.

Рис. 21. Модуль преобразователя частоты Х-диапазона с одного щелевого излучателя
Понятно, что в данном случае есть ещё один общий модуль деления сигнала гетеродинной частоты между модулями щелевых излучателей с формированием самого гетеродинного сигнала на основе синтезатора частоты, и в этом же модуле обеспечивается суммирование принимаемых сигналов от щелевых излучателей с усилением и деление передаваемого сигнала. Вариант модуля формирования гетеродинного сигнала показан на рисунке 22.
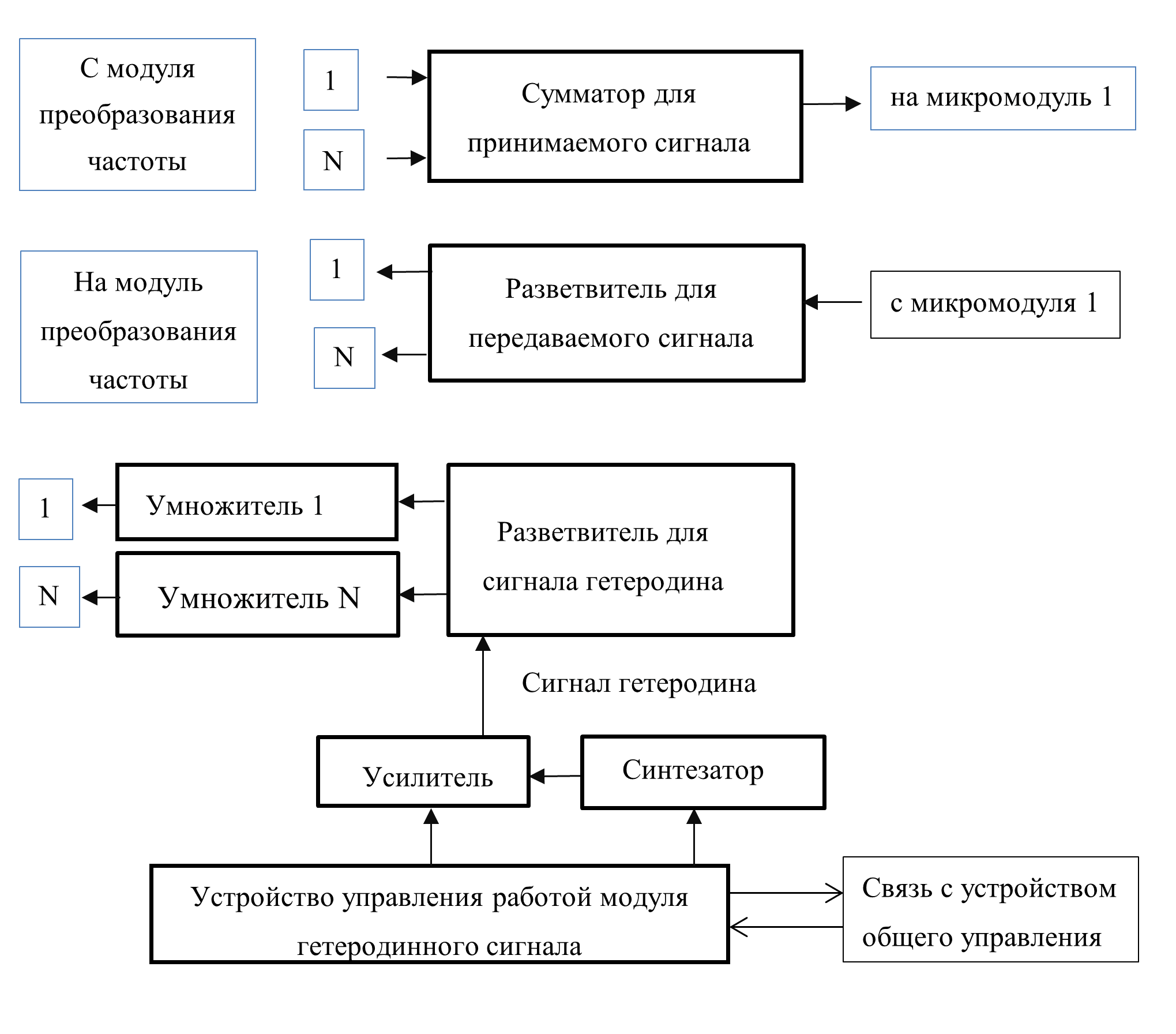
Рис. 22. Модуль образования гетеродинного сигнала
Иными словами, АФАР Х-диапазона состоит из 3-х модулей вместо 2-х модулей для АФАР на патч излучателях. Конечно, для гетеродинного сигнала при разветвлении на модули с щелевыми излучателями также есть потери при микрополосковом варианте разветвителя, но их можно значительно снизить используя умножители частоты на каждом СВЧ выходе на модули щелевых излучателей с платы модуля гетеродинного сигнала (можно разместить умножители и на плате по рисунку 21). То есть, здесь возможен вариант компромиссного решения между потерями за счёт затухания в микрополосках и потерями от использования умножителей частоты. Чтобы обеспечить вариант любой поляризации излучаемого сигнала необходимо расположить элементы по функциональной схеме рисунка 21 с обеих сторон платы, с одной стороны для канала щелей с вертикальной поляризацией, а с другой стороны для канала горизонтальной поляризации. При этом плата модуля гетеродина по рисунку 22 с разветвителями и сумматорами будет иметь планарное расположение к полотну АФАР и крепится к платам модулей щелевых излучателей по рисунку 21, имеющих слотовую конструкцию, к полотну АФАР (перпендикулярное расположение) через разъёмы защёлки ММРХ. Для обеспечения режима наведения по помеховому сигналу предусмотрен вариант использования ограничителя с аттенюатором (рисунок 21) с которого сигнал о превышении порога поступает на устройство управления работой модуля. После чего выбирается соответствующий уровень аттенюатора с отсутствием превышения порога ограничения, и далее БПЛА переходит в режим наведения по источнику помех.
Известная компонентная база в диапазоне десяти и более ГГц пока не имеет оптимизированных характеристик с точки зрения сочетания широкой полосы пропускания и получения наименьших потерь при максимальном коэффициенте усиления исходя из перехода от полосковой конструкции антенн к щелевым конструкциям антенн. Из широкополосных элементов можно выбрать аттенюатор НМС424 в диапазоне от 0 до 13 ГГц с разрядностью в 6 бит, который даёт потери в 4 дБ и поэтому он подключается только в момент срабатывания ограничителя с диапазоном ослабления сигнала от 0,5 дБ до 31,5 дБ с точкой пересечения 3 порядка по входу 32 дБм и управляющим напряжением 0 В/ -5 В. В качестве переключателя на входе от антенны можно использовать НМС232 в диапазоне от 0-15 ГГц с потерями в 1,4 дБ и развязкой 50 дБ при скорости переключения 5 нсек при точке компрессии по 1 дБ в 26 дБм и управляющем напряжении 0 В/ -5 В. Из малошумящих усилителей можно выбрать НМС903 в частотном диапазоне 6-18 ГГц с коэффициентом усиления в 19 дБ при точке пересечения третьего порядка по выходу 27 дБм и коэффициенте шума 1,6 дБ. Предусилитель НМС3653LP3BE имеет диапазон от 7 до 15 ГГц с коэффициентом усиления в 15 дБ при коэффициенте шума 4 дБ и при точке пересечения первого порядка по выходу 15 дБм (25 млВт). В качестве усилителя мощности в диапазоне 6-18 ГГц можно использовать HMC441LC3B с усилением 17 дБ питанием в 5 В и мощностью в 100 млВт (20дБм). Для уменьшения потерь связанных с микрополосковым исполнением разветвителя для гетеродинного сигнала по рисунку 22 можно использовать умножитель частоты (MXS-24-01) на 2 или 4 при входных частотах на умножитель от 2-4 ГГц. При этом требуется входная мощность 4-6 дБм, с достижением подавления составляющих на 60 дБ и при выходной мощности в 10 дБм с полосой пропускания в 10 %. Однако фазовращатели для гетеродинного сигнала пока имеют достаточно узкий диапазон частот, и для диапазона в 9,6 ГГц подходит НМС642 (9-12,5 ГГц) с вносимыми потерями 6,5 дБ. При разрядности в 6 бит он обеспечивает диапазон перестройки фазы от 5,625о до 360о, при этом точка пересечения по входу третьего порядка 41 дБм при управляющем напряжении 0 В/ 5 В. В качестве смесителя вниз можно использовать двухбалансный смееситель М7-Пр-0610/3 ФГУП «НПП «Исток» с подавлением зеркального канала с диапазоном частот от 6-10 ГГц с сигналом гетеродина в 10-20 мВт от 6-10 ГГц и развязкой между принимаемым сигналом и сигналом гетеродина в 25 дБ, развязкой принимаемого сигнала и сигнала гетеродина с сигналом на промежуточной частоте в 30 дБ и с диапазоном промежуточных частот 0-1 ГГц. При этом потери преобразования порядка 7 дБ при КСВН порядка 2 дБ и подавлением зеркального канала в 17 дБ. Существует также двухбалансный смееситель преобразования частоты вверх М7-Пр-0911/2 ФГУП «НПП «Исток» с диапазоном входных частот от 0 до 1 ГГц, диапазоном выходных частот от 9-11 ГГц с сигналом гетеродина в 10-20 мВт от 9-11 ГГц и развязкой между выходным сигналом и сигналом на входе в 30 дБ, развязкой выходного сигнала и сигнала гетеродина в 25 дБ. При этом потери преобразования порядка 7 дБ при КСВН порядка 2 дБ и подавлением зеркального канала в 17 дБ.
Как отмечалось выше для выполнения функций связи требуется общая мощность в 8 Вт. При использовании в полотне АФАР 64 излучателей (это фактически 8 излучателей по горизонтали и 8 излучателей по вертикали) мы получим 6,4 Вт для вертикальной поляризации (усилитель мощности HMC441LC3B в 100 млВт), если учесть излучатели для горизонтальной поляризации, то получим общую выходную мощность в 12,8 Вт. Это позволяет использовать данный диапазон, как для радиоуправления, так и для передачи изображения. Отметим, что выбираемая элементная база не является оптимальной и требует новых конструкторских разработок от специалистов радиоэлектронной промышленности.
Для постановки помех и для наведения на источник излучения щелевую антенну и модули преобразования для Х - диапазона частот лучше располагать в передней части БПЛА дальнего действия. Однако и АФАР диапазона от 1-4 ГГц также может использоваться для наведения и постановки помех, поэтому необходимо предусмотреть съёмный вариант по размещению антенн разного диапазона в передней части БПЛА. Кроме того для АФАР разного диапазона необходимо предусмотреть выделение места и в задней полусфере для передачи полезной информации (например, сигналы радиоуправления) и изображений. Так как микромодуль 1 подсоединяется к модулю преобразования частоты (или модулю гетеродинного сигнала) на соединителях защёлках с планарным положением относительно полотна АФАР, то можно предусмотреть отдельный вывод от микромодуля 1 на широко направленную антенну обеспечивающую диапазон от 175 МГц до 1 ГГц. Применение дополнительно диапазона до 1 ГГц позволит управлять БПЛА в любом его положении относительно командного пункта с повышением помехозащищённости. Использование АФАР одного диапазона в передней и задней полусферах позволяет исключить воздействие помех за счёт того, что, если есть попытка постановки помех каналам связи и управления, то БПЛА переходит в режим наведения на источник помех, а поставленную задачу выполняют следующие БПЛА. Одновременно АФАР в диапазоне от 1,5-1,7 ГГц может использоваться для приёма сигналов от ГЛОНАСС, что требует располагать такую антенну в верхней части БПЛА, кроме того в диапазоне 3,1-3,2 ГГц АФАР можно использовать для работы в режиме радиовысотомера. Функционирование АФАР в диапазоне от 1 до 3,2 ГГц в целях экономии места для выполнения задач многофункциональности можно совместить за счёт использования механического управления антенной через электродвигатель. Пример принципа механического управления можно осуществлять по аналогии управления по рисунку 23.
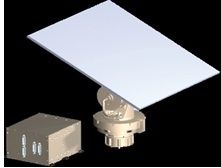
Рис. 23. Пример способа управления антенной
В этом случае можно использовать антенну, состоящую из двух патч с питанием не через разветвитель, а с подключением СВЧ сигнала непосредственно к двум патч. При этом наведение на источник помех можно осуществлять за счёт механического углового сканирования через электродвигатель. Отсюда схема преобразования частоты уменьшается до одного канала. Так как для выполнения задачи радиоуправления и передачи изображения достаточно антенны и из двух патч, то можно использовать мобильное устройство по рисунку 2 при общих размерах антенны 14 см×7 см, с формированием круговой поляризации и диапазоном частот от 2,4 до 2,7 ГГц. Надо отметить, что использование одного патч только лишь снизит коэффициент усиления антенны при тех же размерах мобильного устройства, а также приведёт к сокращению усилителей мощности, что снизит дальность радиосвязи. В мобильном устройстве по рисунку 2 формирование круговой поляризации осуществляется за счёт подбора длин шлейфов подсоединяемых к двум ортогональным серединам сторон патч. Собственно к шлейфам могут подсоединяться и полосковые фильтры. При увеличении АФАР до 4-х патч возможно в этом диапазоне частот сформировать и электронное угловое сканирование на основе двух мобильных устройств по рисунку 2, с использованием общего синтезатора частоты и добавлением фазовращателей в цепь гетеродинного сигнала на входе двух балансных модуляторов формирующих передаваемый ФКМ сигнал. Каждый из фазовращателей имеет простую конструкцию, состоящую из индуктивоности (L) и ёмкости (С) и при подключении этих радиоэлементов через трёхпозиционный ключ получаем 5 положений луча, например, по вертикали. Причём роль управления фазовращателями будет осуществляться ПЛИС типа A3P250 вместо ПЛИС A3PE3000L, который ранее использовался для обработки сигнала во втором мобильном устройстве. Для обеспечения такого же углового сканирования по горизонтали потребуется использовать ещё два ключа и два фазовращателя на канале приёма и передачи. Иными словами угловое сканирование обеспечивается на основе 6 трёх позиционных ключей и 6 LC – фазовращателей через ПЛИС типа A3P250. Таким образом, доработанный вариант мобильного устройства по рисунку 2 фактически обеспечивает необходимые функции по радиоуправлению, передаче изображения, и угловому электронному сканированию для наведения на источник помех при наличии 4-х патч. При этом размеры антенны 14 см×14 см. Так как, в мобильном устройстве по рисунку 2 в качестве усилителей мощности используется одноваттный усилитель, то в общей сумме мы будем иметь выходную мощность в 8 Вт. Преимущество в полной функциональной законченности узла одновременно определяет и недостаток, связанный с тем, что для АФАР состоящей из гораздо большего количества патч не требуется формировать обработку сигнала, а также передачу сигнала в узле состоящем всего из двух или 4-х патч.
Понятно, что любая антенна должна располагаться под обтекателем, и здесь для сокращения площади антенны в вертикальной и горизонтальной плоскости при частотах порядка 1-2,3 ГГц желательно использовать диэлектрик между проводящей подложкой и элементом патч. Однако при этом растут потери, и снижается коэффициент усиления антенны. Чтобы это компенсировать, можно увеличить площадь антенны, в горизонтальной плоскости. Это более предпочтительно в силу того, что по горизонтали размеры БПЛА значительно больше, чем по вертикали, в силу размаха крыльев. В этом случае будет использоваться для радиоуправления и приёма изображения 8 патч вместо четырёх (2 модуля антенн по 4-е патч в горизонтали с преобразователем частоты). Переход на большее количество патч по горизонтали, а возможно и по вертикали, потребуется и для вариантов АФАР на частоте от 2,7 ГГц и выше. Действительно, для АФАР состоящей из 4-х патч с полосой пропускания частоты в 2,35-2,55 ГГц [7], при размерах с воздушным заполнением 16,5 см×16,5 см размещение радиоэлементов на плате с её планарным расположением относительно полотна АФАР не представляет сложностей и по функциональной схеме рисунка 17. Для частот АФАР порядка 1-2,35 ГГц требуется даже сокращать размеры патч за счёт использования диэлектрических заполнителей, но для частоты АФАР уже порядка 2,7 ГГц - 3,2 ГГц требуется использование технических решений позволяющих уменьшить занимаемую площадь радиоэлементами при планарном размещении без уменьшения размеров патч с воздушным заполнением. В этом случае, чтобы обеспечить выполнение функций управления лучом АФАР для наведения на цель по источнику излучения, необходимо идти на упрощение с исключением энергопотребляющих элементов за счёт замены их пассивными элементами, то есть лучше, например, по вертикали формировать 5 положений луча АФАР за счёт использования фазовращателей простой конструкции в виде радиоэлементов индуктивности (L) и ёмкости (С), подключение которых осуществляется через ключи. Одновременно предусматривается и механическое изменение положения АФАР по вертикали как это показано на рисунке 23 в силу того, что может потребоваться и выполнение функции радиовысотомера, а в будущем и связь с КА НССС. По горизонтали в этом случае используется формирование луча за счёт расположения 8-ми патч, с применением одного балансного модулятора на 4 патч, с увеличением площади антенны в этом направлении в 2 раза. Соответственно угловое сканирование по горизонтали будет обеспечиваться изменением фазы за счёт 2-х балансных модуляторов, но с большей точностью из-за увеличения коэффициента усиления в этой плоскости. На рисунке 24 показана топология размещения радиоэлементов модуля преобразователя частоты для 4-х патч такой конструкции при частоте 2,7 ГГц с одной поляризацией сигнала по горизонтали.
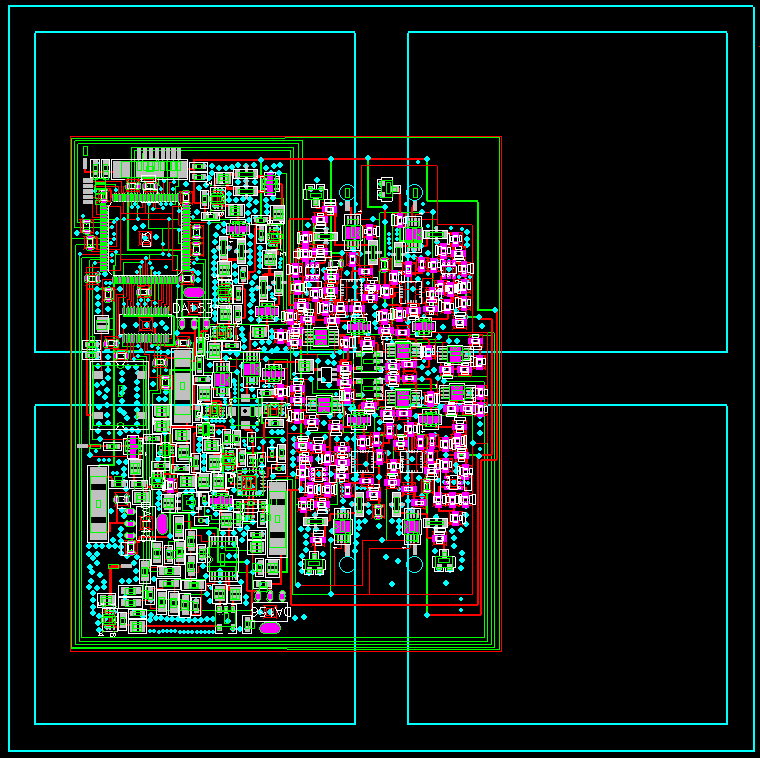
Рис. 24. Топология размещения радиоэлементов для АФАР диапазона 2,7 ГГц
Здесь сами четыре патч представлены очерченными квадратиками голубого цвета, а место их СВЧ соединения с платой преобразователя частоты с формированием излучения в горизонтальной плоскости очерчено окружностями также голубого цвета. При этом питание патч по горизонтали осуществляется сигналами в противофазе. Более детально сама топология показана на рисунке 25.
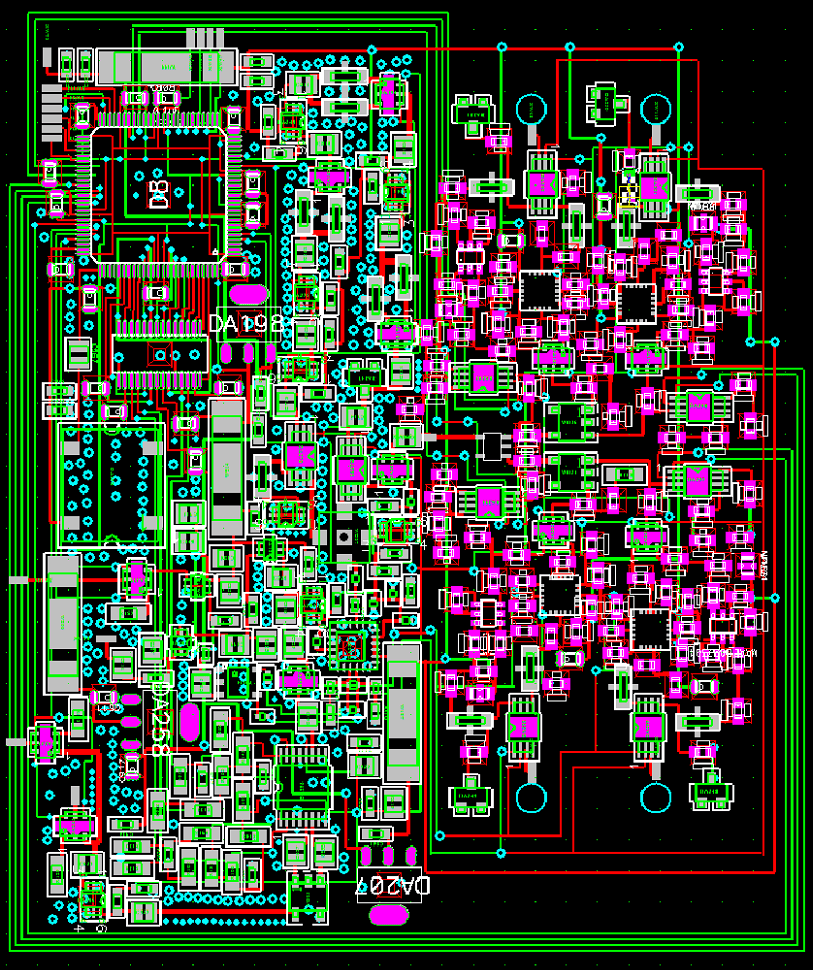
Рис. 25. Топология расположения радиоэлементов при частоте АФАР на 2,7 ГГц
Кроме того, для формирования излучения в вертикальной плоскости, с возможностью получения круговой поляризации, необходимо разместить, с обратной стороны многослойной платы преобразователя частоты, радиоэлементы по аналогичной схеме, но поменяв места питания патч СВЧ сигналами в местах перпендикулярных к тем, что использовались для формирования горизонтальной поляризации. Однако возможен вариант формирования круговой поляризации за счёт использования соответствующей конфигурации и длин шлейфов, подсоединяемых к серединам двух перпендикулярных сторон патч, как это предложено в мобильном устройстве по рисунку 2. Выигрыш здесь в весе и энергопотреблении, но при этом ухудшаются условия для управления и формирования круговой поляризации в зависимости от частоты. Так как у нас на частоте 2,7 ГГц используется АФАР состоящая из 2-х АФАР по 4 патч (8 патч по горизонтали), то нам требуется ещё одна плата между микромодулем 1 и платами преобразования частоты, которая будет выполнять функции суммирования принимаемого сигнала на микромодуль 1 и разветвления передаваемого сигнала от микромодуля 1. Одновременно в этой плате будет формироваться сигнал гетеродина на платы преобразования по частоте входного и передаваемого сигнала. Надо отметить, что топология размещения радиоэлементов по рисунку 23 позволяет сократить размеры патч при воздушном заполнении ещё в 1,5 раза, что даст возможный диапазон использования патч в АФАР с планарным расположением вплоть до 4 ГГц. Это вполне приемлемый вариант, если учесть, что некоторые радиоэлементы мы можем разместить на второй плате обеспечивающей формирование гетеродинного сигнала аналогично варианту с щелевой антенной. Для оптимизации работы, сами АФАР разного диапазона частот на основе патч должны быть отдельными заменяемыми элементами, которые подсоединяются к плате преобразования частоты миниатюрными сверхширокополосными соединителями типа ММРХ с механизмом соединения с защёлкой. Естественно, что в этом случае необходимо обеспечить подвод полосковых шлейфов необходимой длины за счёт соответствующей конфигурации в строго фиксированные места. Сами полосковые шлейфы, которые подсоединяются к патч, можно расположить с обратной стороны проводящей подложки антенны через слой диэлектрика к соответствующим местам соединений СВЧ на плате преобразователя частоты. Здесь к шлейфам можно подсоединить и полосковые фильтры. Изменение фаз за счёт разницы длины шлейфов в зависимости от диапазона несущих частот можно учесть за счёт изменения фазы в балансном модуляторе или фазовращателе. Собственно такая конструкция позволяет развязать место расположения вывода приёма-передачи СВЧ сигнала от местоположения питаемых патч. Это позволяет уплотнить расположение радиоэлементов на плате, подсоединяемой к антенне, а также увеличить количество патч в АФАР.
Понятно, что коэффициент усиления антенны, с улучшением помехозащищённости, можно увеличить за счёт использования не 4-х патч в АФАР, а за счёт использования 16 патч в АФАР при несущих частотах выше 2,7 ГГц, с уменьшением при этом мощности выходных усилителей, как показано на рисунке 26. При этом, так как используется всего один канал на промежуточной частоте для всех патч сокращается количество радиоэлементов и энергопотребление. Соответственно возникает возможность расположения всех радиоэлементов на одной плате (рисунок 26), так как освобождается место и для модуля образования гетеродинного сигнала по рисунку 22 и для микромодуля 1 по рисунку 1.
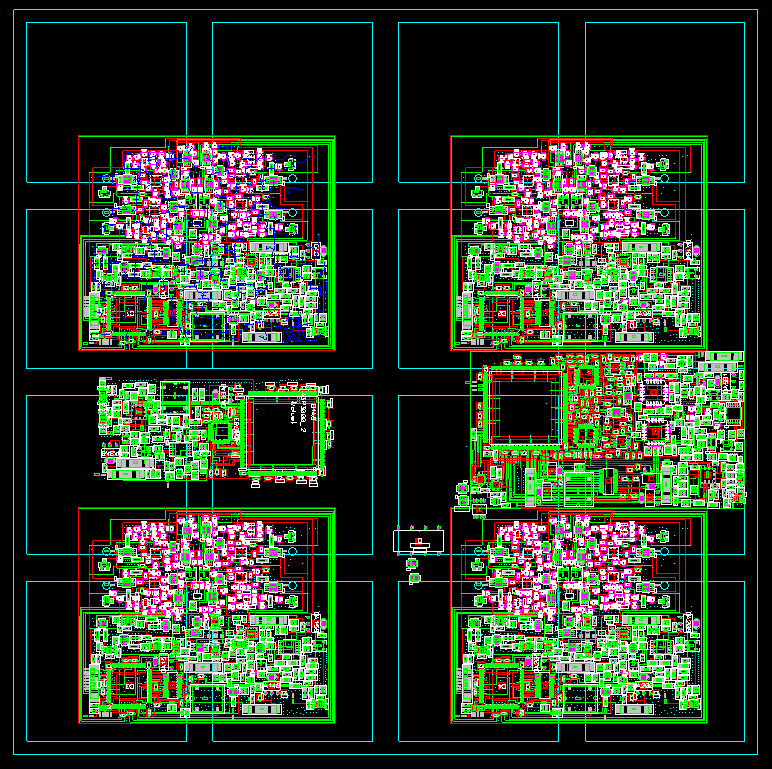
Рис. 26. Общая плата для АФАР состоящей из 16 патч (4 патч×4 патч)
Здесь по центру по горизонтали слева располагается плата формирующая передаваемый сигнал, а справа плата обработки входного сигнала (по сути микромодуль 1). По краям располагаются платы преобразования частоты. Одновременно, на этой плате можно разместить и микросхему по управлению всем БПЛА. Для этого, в случае необходимости при использовании шлейфов от патч, можно передвинуть модули преобразования частоты на края АФАР как показано на рисунке 27.
Рис. 27. Топология АФАР на 16 патч с передвинутыми модулями преобразования частоты на края АФАР
Таким образом, возможно использование для подключения к антенне всего одной печатной платы с расположением радиоэлементов на одной её стороне. При этом возможна конструкция АФАР из 8 патч с уменьшением количества радиоэлементов и размещением устройства управления, размеры которого не превышают 28 см×14 см. АФАР, состоящая из 16 патч, может иметь применение для обеспечения связи с БПЛА на расстояниях в 400 км как терминал командного пункта. Кроме того она может быть востребована в будущем для обеспечения связи со скоростью 150 Мбит/сек по аналогии со связью One Web и Starlink как наземный терминал, для предполагаемой нашей группировки в 98 КА в системе низкоорбитальной спутниковой системы связи (НССС), которая придёт на замену системе Гонец и системе навигации ГЛОНАСС как вариант более помехозащищённой системы использующей режим запрос-ответ. В таких КА рассматривается возможность применения полотен АФАР уже на 256 элементов (16 патч×16 патч) в полосе несущих частот от 2,4 ГГц до 2,7 ГГц на основе рисунков 1 и 17 [8-10]. При этом на КА предусматривается раскладываемая конструкция из 15 полотен по рисунку 28.

Рис. 28. Конструкция расположения полотен АФАР в космосе для КА НССС
Кроме того, отдельное полотно АФАР может разбиваться на 4 секторных антенны (8 патч ×8 патч=64 патч). Это позволяет формировать 60 лучей вместо 48 лучей по 53 патч как в системе связи Iridium [2]. В этом случае на 64 патч используется всего один канал для обработки и передачи сигнала. С учётом многофункционального использования и размеров радиоэлементов с размещением по топологии по рисункам 22-25 мы можем использовать только одну плату для полотна АФАР. При этом на полотне будут умещаться как микромодули 1, модуль формирования гетеродинной частоты, модули преобразования частоты и устройства управления, с учётом размещения показанного на рисунке 29.
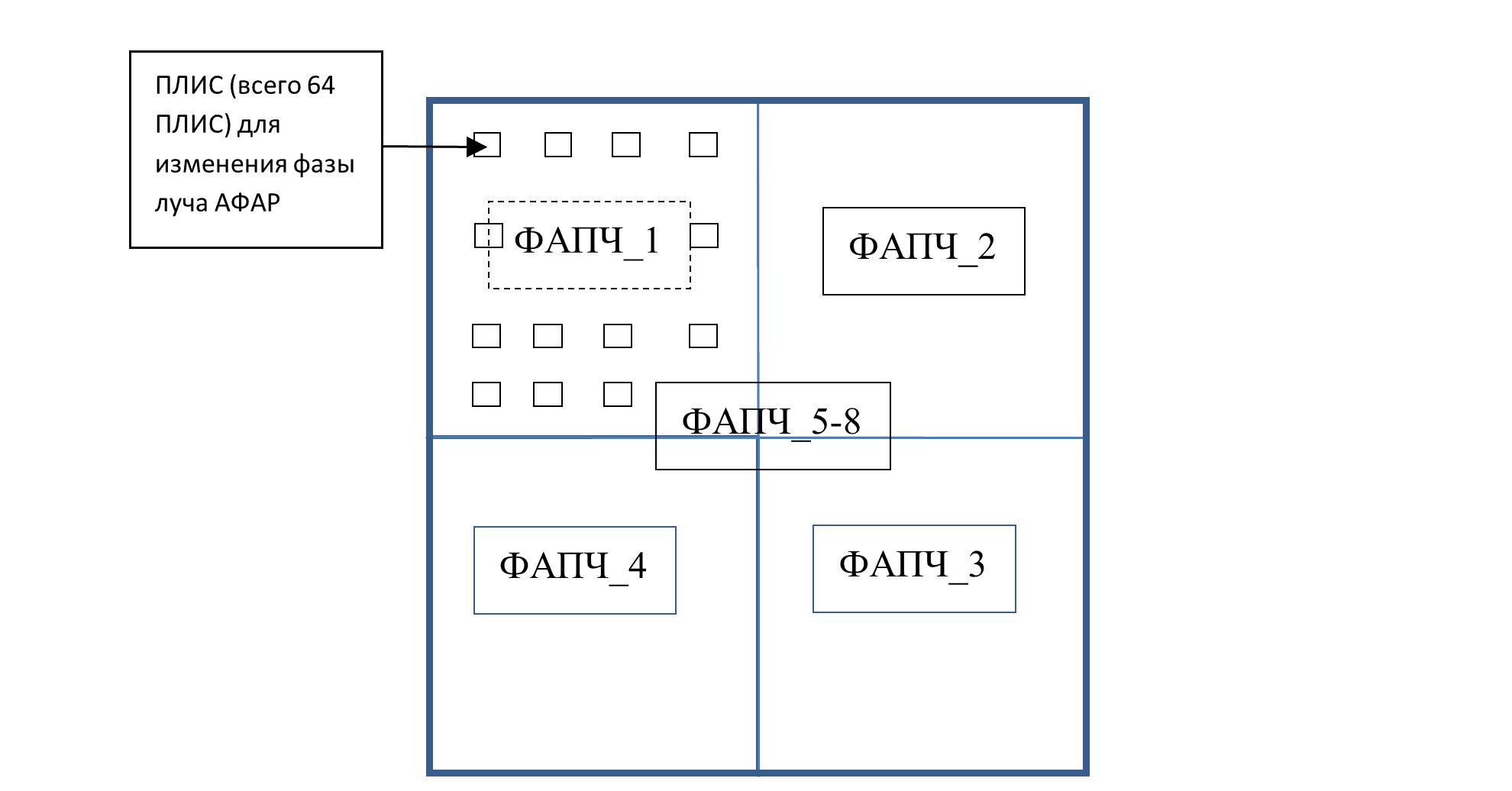
Рис. 29. Расположение 4-х секционных АФАР (подАФАР) с наличием фазовой автоподстройки частоты (ФАПЧ – микромодуль 1) и малоразмерных программно-логических интегральных схем (ПЛИС A3P250 на 4 патч) для изменения положения луча при работе устройства по способу в режиме Iridium при 60 лучах одновременно с разбиением полотна антенны на 4 зоны по 64 элемента ПАТЧ (всего 256 активных элемента в полотне АФАР)
Радиоэлементы на плате можно размещать плотно благодаря тому, что фазовые набеги исключаются за счёт использования шлейфов одинаковой длины с разной конфигурацией с СВЧ выходов антенны. Возможна коррекция изменения положения луча за счёт значений фаз поступающих на балансные модуляторы при изменении несущей частоты. На плате, для размещения ФАПЧ и общего устройства управления, остаётся достаточно места даже при частоте порядка 4 ГГц. При этом не учитывается возможность микроминиатюризации через создание больших интегральных микросхем. Надо отметить, что АФАР из патч позволит обеспечить наведение БПЛА на радиосигнал в диапазоне 2-4 ГГц, а это обеспечит уничтожение подвижной РЛС контрбатарейной борьбы AN/TPQ-53 (рисунок 30).

Рис. 30. РЛС контрбатарейной борьбы AN/TPQ-53 в диапазоне 2-4 ГГц
Для РЛС контрбатарейной борьбы AN/TPQ-36 работающей в Х-диапазоне можно использовать щелевую антенную решётку на основе функциональной схемы по рисунку 20. Преимущество БПЛА в том, что они могут заходить на цель уничтожения с любого направления и РЛС контрбатарейной борьбы просто не увидят атакующий БПЛА.
Таким образом, при выработке требований к блоку радиоуправления беспилотного летательного аппарата (БПЛА) с оптимизацией его функциональных схем в широком диапазоне частот, мы показали возможные реализации на известной радиоэлементной базе с установлением возможных размеров плат в пределах размеров требуемых антенных элементов излучения. При этом мы показали многофункциональность используемых модулей, а способ предложенной обработки сигнала в [9] обеспечивает высокую помехозащищённость. Полученные размеры плат размещения радиоэлементов по предлагаемым функциональным схемам не превосходят известные аналоги, например, размеры платы размещения радиоэлементов в устройстве Е2Е4 KHUKRI STEALTH для БПЛА ближнего радиуса действия. Учитывая возможность использования БПЛА разного радиуса действия в широком диапазоне частот, для унификации, с целью уменьшения экономических затрат, необходимо предусмотреть несколько типов антенн, а также печатных плат радиомодемов разного диапазона частот по предложенным функциональным схемам, которые при заданных определённых местах нахождения СВЧ разъёмов – защёлок будут съёмными заменяемыми элементами в присоединении друг к другу. Именно дешевизна БПЛА, что обеспечивается унификацией радиоузлов, как для военных, так и для гражданских целей, приведут к массовому их использованию.
