Концептуальной основой архитектуры автоматизированного управления дорожным движением (АСУДД) и автоматизированных транспортных информационных систем (АТИС) должны соответствовать соответствующим требованиям:
- Оборудованные детекторами транспорта, которые своевременно предоставляют данные в АСУДД.
- Система сбора данных, собирающая первичную информацию о транспортном потоке в режиме реального времени, которая должна быть обработана и проверена перед использованием моделями системы управления.
- База данных характеристик транспортного потока, в которой хранятся данные, используемые моделями движения, в сочетании с данными в реальном времени.
- Модели движения, предназначенные для оценки и краткосрочного прогнозирования состояния потока, обеспеченные текущими и архивными данными.
- Временно зависимые матрицы корреспонденций, которые являются входными данными для адаптивных транспортных моделей. Алгоритмы оценки объединяют данные реального времени и архивные вместе с другими входными данными.
- Планируемые и прогнозируемые состояния сети сравниваются с предполагаемыми состояниями. Если сравнение в порядке, никаких действий не принимается, в противном случае изменяться политика управлением транспортным потоком с целью достижения желаемых результатов.
На рисунке 1 схематически изображена интеграция АСУДД и АТИС:

Рис. 1. Концептуальный подход к архитектуре АТИС / АСУД
В этой статье рассмотрим функциональную возможность детекторов нового поколения. Сбор данных о дорожном движении, который предполагает, что часть данных о транспортном потоке собирается детекторами с индукционной петлей (то есть масса, интенсивность и скорость), дополняется точными измерениями времени и скорости движения между двумя последовательными датчиками на основе новых технологий, способных регистрировать электронную подпись конкретного находящегося на борту устройства.
Одним из наиболее типичных таких детектор является устройства регистрации информации о Bluetooth модуле находящегося на борту транспортного средства. Детектор объединяет множество технологий, которые позволяют ему проверять спектр Bluetooth и Wi-Fi устройств в пределах зоны покрытия. Он фиксирует публичную часть сигналов Bluetooth или Wi-Fi. Bluetooth является глобальным стандартным протоколом (IEEE 802.15.1) для беспроводного обмена информацией между мобильными устройствами с использованием полосы радиочастот 2,4 ГГц. Зарегистрированный код состоит из комбинации 6 буквенно-цифровых пар (шестнадцатеричный). Уникальность MAC-адреса позволяет использовать алгоритм сопоставления для регистрации устройства, когда он становится видимым для датчика. Основные принципы работы этих детекторов описаны на рисунке 2. Данные, полученные каждым детектором, отправляются для обработки на центральный сервер GPRS.
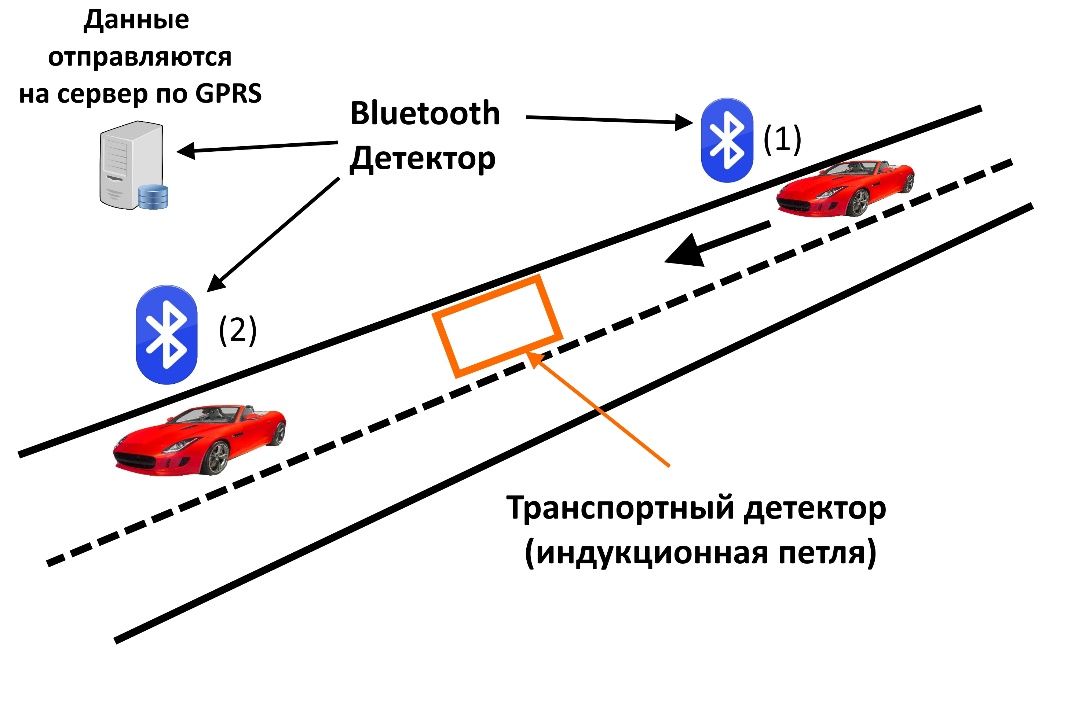
Рис. 2. Мониторинг автомобиля с помощью детекторов на базе Bluetooth
Измеренные данные не могут быть использованы без предварительной обработки и фильтрации выбросов, которые могут сместить выборку, например транспортное средство, которое останавливается на заправочной станции между местами расположения детекторов. Для решения этой проблемы будет использоваться метод, основанный на фильтре Калмана.
Пилотный проект был осуществлен к северу от Барселоны (Испания) на 40 км автомагистрали AP-7. Рисунок 3 отображает зону и подсвечивает с помощью цветных кружков расположение задействованных датчиков. На рисунке 3 также изображены два примера измерений, выполненных датчиками на границах участка автомагистрали: интенсивность на юг и север (синяя область) и скорость (черная линия).
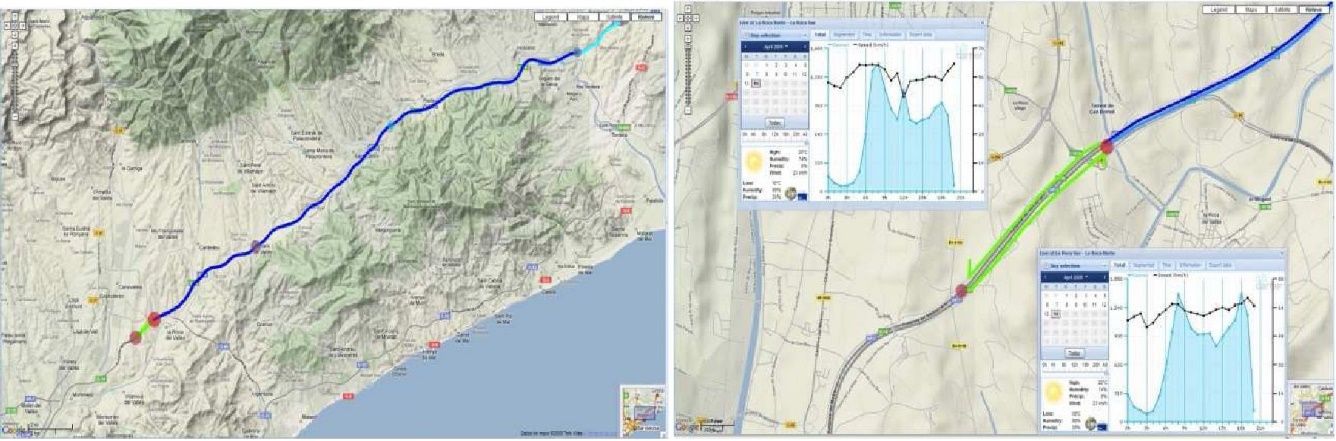
Рис. 3. Место пилотного проекта на автомагистрали AP-7 в Барселоне и два примера обнаружения Bluetooth: скорость и количество обнаруженных устройств
Преимущества Bluetooth детектора:
• Анонимность и конфиденциальность;
• Возможность расширения использования для устройств с поддержкой BT среди участников дорожного движения;
• Сравнительно недорогая стоимость организации инфраструктуры;
• Низкая стоимость обслуживания датчиков;
• Низкая чувствительность к погодным условиям;
• Возможность составления матрицы корреспонденции.
Недостатки Bluetooth детектора:
• Низкая частота дискретизации;
• Необходимость в дальнейшем расчете и фильтрации данных;
• Высокая чувствительность к выбросам (например, высокоскоростные и низкоскоростные транспортные средства и др.);
• Неопределенность в отношении точности и достоверности расчетного времени в пути и интенсивности транспортных средств.
