
В соответствии с [1, 2, 3] мы установили оптимальные радиотехнические параметры для радио-модуля БПЛА и соответствующие функциональные схемы с учётом использования в широком диапазоне частот для радиоуправления, радиосвязи и навигации без определения максимума по скрытности передаваемого сигнала для средств радиотехнической разведки (РТР). При этом максимальная скорость передачи информации в режиме BPSK была определена в 38-50 Мбит/сек, тактовая частота дискретизации должна быть от 100 до 150 МГц, аналого-цифровой преобразователь (АЦП) должен иметь разрядность в 13-14 бит. Кроме того, мы показали возможность размещения радиоэлементов для узлов БПЛА на платах при наличии размеров не более чем у аналогов и прототипов и привели соответствующие функциональные схемы. Однако, при разработке устройств радиоуправления первое требование касается обеспечения помехозащищённости радиоуправления БПЛА, что связано с использованием либо маломощных сигналов на уровне ниже шумов с псевдослучайным кодированием и применением перестройки параметров при быстрой начальной синхронизации, либо с использованием сигналов управления повышенной импульсной мощности, но коротких по длительности. Последний вариант эффективен в том случае, если противник использует помехи, перегружающие входной приёмный тракт. Здесь, для исключения влияния, возможен вариант, например, ретрансляции сигнала управления через другие соседние БПЛА, которые не подвергаются помехам, за счёт использования другого диапазона частот. Второе требование касается обеспечения многофункциональности, без которой помехозащищённость будет мало эффективна, с учётом практической реализуемости при унификации для массового производства с применением, как в военной, так и гражданской сфере деятельности. Так, например, данные от навигации будут полезны в случае перегрузки входного тракта приёмника шумами для ухода из зоны воздействия помех. Это означает, что при простоте функциональной схемы основной упор по помехозащищённости должен достигаться за счёт программного обеспечения со сменой параметров сигнала. Сам принцип обеспечения радиоуправления не вызывает трудности даже с точки зрения применения уже известных приёмных устройств. Действительно, мы можем определить необходимую минимальную скорость передачи информации для радиоуправления по скорости команд от оператора. Как известно оператор способен оценивать картинку изображения от БПЛА и принимать решения по кадру информации со скоростью не более 50 кадров в секунду (телевизионное изображение). При этом от глаз до пальца нервный импульс пройдёт за 20 млсек. Таким образом, необходимая скорость передачи информации при операторе с устройства управления до БПЛА с обновлением данных, исходя из максимальных значений, должна осуществляться не менее чем один раз каждые 20 млсек (50 Гц). Для оценки количества информации будем исходить от градаций необходимых значений по скорости БПЛА. При учёте максимальной скорости в 300 км/час (с учётом перспективных разработок для БПЛА разного класса) мы будем иметь максимальное значение по скорости в ±83,3 м/сек. С учётом точности выставления скорости в 10 см/сек (такая точность необходима, например, при посадке БПЛА), нам по минимуму потребуется ±833 градации. При движении вперёд, назад, влево, вправо, вверх и вниз, мы должны иметь ±2499 значений, по модулю это составит величину в 4998 значений (в пересчёте на двоичный код это 13 -14 бит). Это означает, что каждые 20 млсек мы должны передавать 14 бит информации, что соответствует величине в 700 бит/сек. На практике же скорость реакции человека лежит в районе 200-400 миллисекунд. В этом случае поток информации для радио-модуля при радиоуправлении будет в пределах 50 бит/сек. Это означает, что в качестве модуля радиоуправления БПЛА может использоваться GPS (ГЛОНАСС) приёмник который имеет массовое производство. Кроме того, GPS (ГЛОНАСС) приёмник необходим на БПЛА для определения местоположения. Аналогично и передатчик телевизионного изображения БПЛА реализуется достаточно просто, так как требуется только считывать изображение с оптоэлектронного средства и передавать его возможно даже аналоговым телевизионным сигналом. Понятно, что для радиоуправления БПЛА с использованием импорт замещения с массовым производством проблема может быть решена уже на данном этапе специальной военной операции (СВО) на основе ширпотреба. Однако недостаток такого замещения связан с тем, что диапазон несущих частот GPS (ГЛОНАСС) известен, а скорость перестройки может составлять десятки секунд и более, что позволяет ставить эффективные помехи каналу радиоуправления, что сейчас и наблюдается на театре военных действий (ТВД). При этом в приёмниках ширпотреба GPS (ГЛОНАСС) используется при приёме и цифровой обработке бинарный сигнал, что позволяет легко перегружать помехой приёмный тракт. Отсюда возникает необходимость усовершенствования радио-модуля БПЛА с целью исключения влияния помех. Это достигается за счёт повышения разрядности квантования, кодирования и изменения параметров сигнала, что невозможно сделать без создания соответствующей многофункциональной программы вшитой в микросхему радио-модуля БПЛА.
Если исходить из указанных параметров по оптимизации в [1, 2. 3], то наиболее близким к разрабатываемому устройству в рамках импорт замещения является радиомодем TRX-8D с серийным производством показанный на рисунке 1.
Рис. 1. Широкополосная система связи с диапазоном несущих частот от 30 МГц до 2,5 ГГц (литера 1) с полосой пропускания от 5 МГц до 80 МГц при мощности передатчика от 0,01 Вт до 5 Вт
С учётом литеров 1, 2 и 3 она может иметь диапазон несущих частот от 30 МГц до 12 ГГц, что требует наличия широкополосной помехи в этом диапазоне частот. В этой системе связи предполагается передавать данные со скоростью 10 Мбит/сек на дальности 240 км, и 50 Мбит/сек на дальности 100 км, при этом надо учитывать, что здесь важную роль для достижения заданной дальности будут играть антенные устройства на приём и передачу. Здесь реализована минимальная скорость передачи информации в 47 кбит/сек. Служебная связь, и управление, осуществляются при 56 кбит/сек. Понятно, что управление для скрытности возможно методом накопления по коду. Сигнал может выделяться при превосходящих шумах, так как рабочее отношение сигнал/шум может достигать до -26 дБ. Точка компрессии по входу приёмника соответствует -26 дБм, что требует использования для подавления приёмного тракта достаточно мощной помехи. При этом заявленная чувствительность приёмника -171,5 дБм/Гц (как будет показано ниже по формуле (1) это завышенная оценка). Здесь также используется интерфейс ввода-вывода в Мбит/с Ethernet: 10/100/1000(RJ-45). Питание 9-14 В. Потребляемая мощность 40 Вт. При этом требуется воздушное вентиляционное охлаждение. Вес устройства порядка 300 г и размеры 160 мм×60 мм×35 мм. Понятно, что данное устройство хоть и имеет сборку в России, но основу составляют иностранные микросхемы и комплектующие, при этом программы обработки сигналов уже заложены в микросхемы и нет возможности изменить или улучшить заданные алгоритмы. Собственно выбор начальной микросхемы обработки сигнала с вшитой программой определяет и все остальные элементы комплекта радио-модуля для совместимости. А это означает, что придётся осуществлять закупку всего иностранного устройства целиком. Кроме того, как показывает практика военных действий в Ираке, микросхема с вшитой иностранной программой может иметь внешнее отключение через спутник по заданному коду или выходить из строя после некоторого заданного периода времени или количества циклов использования. Понятно, что потребление в 40 Вт позволительно лишь для БПЛА большой дальности.
Ещё одним аналогом для создаваемого радиомодема может служить и известный радио-модуль БПЛА на малых дальностях в диапазоне частот от 3,4 ГГц до 3,6 ГГц в устройстве с управлением Е2Е4 KHUKRI STEALTH по рисунку 2.

Рис. 2. Используемый радио-модуль для передачи информации в БПЛА малой дальности

 (1)
(1)
Так как вариант по рисунку 2 уже массово используется для БПЛА, то сравнение будем проводить именно с ним, при этом будем учитывать и наилучшие характеристики радио-модуля по рисунку 1. Кроме того, мы также должны помнить, что используемые микросхемы здесь также иностранного производства с уже «вшитыми» программами, что не исключает диверсий отключения и применения санкций по импорту поставок. Так как основным приоритетом является помехозащищённость на любых дальностях от пункта управления, и при этом желательно соблюсти соответствующие параметры по габаритам, массе, потреблении мощности и определению местоположения, то перспективной защитой является управление и передача данных не на прямую, а по цепочке малоразмерных БПЛА, которые могут иметь различные диапазоны частот на приём и передачу. Это приводит к тому, что противник в плане радиоэлектронной борьбы (РЭБ) будет вынужден перекрывать весь диапазон частот вплоть до 12 ГГц (если исходить из устройства по рисунку 1), что снижает спектральную плотность помехи. Однако взаимодействие БПЛА подразумевает многофункциональное применение радио-модулей. Здесь с точки зрения многофункциональности, может потребоваться не только передача, но и приём цифрового изображения с высоким разрешением, а также собственное определение местоположения. В этом случае устройство по рисунку 2 уступает по скорости в (50 Мбит/сек)/(1,8 Мбит/сек)=27,7 раз по сравнению с радио-модулем по рисунку 1, который имеет скорость передачи информации в 50 Мбит/сек. С учётом формулы (1) из-за того, что в устройстве по рисунку 2 используется сложный сигнал QAM64, чувствительность в устройстве по рисунку 1 также будет лучше. Однако настоящего сравнения, исходя из заявленных характеристик устройств по рисунку 1 и 2, мы провести не можем в силу того, что заявленная чувствительность в -171,5 дБм/Гц при полосе в 50 МГц даёт чувствительность в -94,5 дБм, а это как минимум на 20 дБ лучше, чем вычисления по формуле (1). Это означает, что определение чувствительности по рисунку 1 проводилось при значениях Nш=1, q=1 и Т=300oK, поэтому, дальнейшее сравнение по параметрам в скорости передачи разрабатываемого устройства будем вести исходя из сравнения с устройством по рисунку 2, хотя и здесь мы имеем завышение чувствительности на 10 дБ. Суть в том, что отсутствие данных по чувствительности при максимальной скорости передачи с вероятностью ошибки в 10-7 по формуле (1), не позволяет точно оценить разницу в программе когерентной обработки сигнала и в используемых методах увеличения скорости передачи. Однако существует классический вариант обработки сигнала, выше которого невозможно улучшить параметры. Так в разрабатываемом устройстве при классическом подходе к обработке сигнала мы дополнительно можем поднять скорость передачи информации в той же полосе частот, если будем использовать режим QAM. При скорости 38 Мбит/сек для BPSK в режиме QAM мы будем иметь скорость передачи до 114 Мбит/сек как показано по результатам математического моделирования с учётом задержек в ПЛИС на рисунке 3.
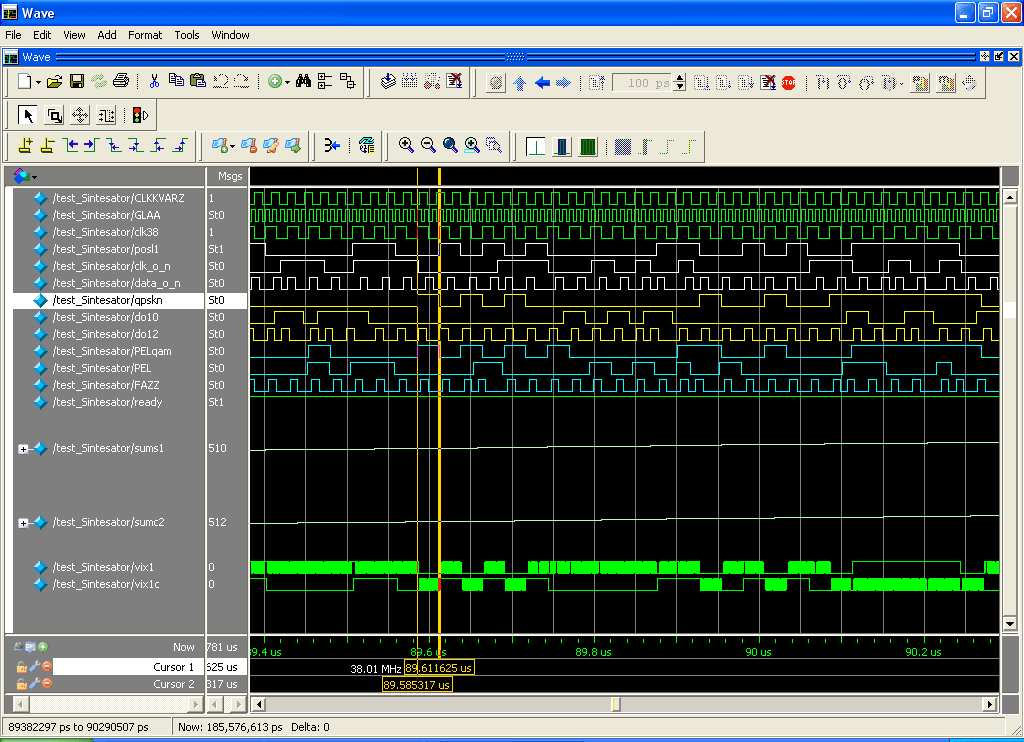
Рис. 3. Выделение сигнала QAM в ПЛИС при сдвиге по частоте Доплера в 23 кГц с общим потоком в 114 Мбит/сек
Таким образом, если исходить из данных для режима QAM приведённых на рисунке 2, то создаваемый радио-модуль превосходит известный радио-модуль для БПЛА на малых дальностях по скорости передачи информации цифрового изображения в десятки раз. Собственно здесь возможен компромисс, когда проигрыш по чувствительности из-за режима QAM в некоторой степени компенсируется за счёт использования избыточных кодов (например, код Виттерби) или используется проверка на ошибку за счёт определения достоверности приходящей информации по чётной или нечётной сумме после приёма некоторого количества бит информации. Напомним, что получить сравнение создаваемого радио-модуля с аналогом по рисунку 1 не представляется возможным из-за отсутствия данных по использованию аналогичных режимов обработки сигнала. Для режима радиоуправления БПЛА скорость передачи информации играет роль в случае использования импульсного режима при большой скважности более десяти раз, что позволяет при высокой импульсной мощности иметь малую среднюю мощность. Например, в системе космической связи «Iridium» для мобильных устройств импульсная мощность составляет 7 Вт, а средняя мощность имеет значение в 0,64 Вт. В этом случае сигнал управления на БПЛА должен превосходить помеху в короткий промежуток времени и обеспечить тем самым надёжное управление. Однако для исключения определения сигнала управления БПЛА средствами радиотехнической разведки (РТР) до применения помех, главное требование относится к скрытности сигнала управления в шумах. Это подразумевает гибкий подход к параметрам сигналов за счёт соответствующей программы в ПЛИС, и оправдывает режим управления с высокой скоростью приёма информации в сочетании с передачей информации от оптоэлектронного устройства БПЛА в режиме разделения по времени. Кроме того, для обеспечения скрытности, чувствительность приёмника БПЛА может быть существенно повышена за счёт использования кодового сигнала при когерентном накоплении. Так при использовании кода Баркера в N=13 символов, у которого уровень бокового лепестка корреляционной функции не превосходит величины 1/N, мы повысим чувствительность в 13 раз. В этом случае уровень порога входного сигнала должен превышать шумы только в 2 раза (q=2,077), а скорость передачи информации будет достигать 3,84 Мбит/сек при чувствительности -85,64 дБм. Это сопоставимо с режимом QPSK для БПЛА с известным радио-модулем в устройстве с управлением Е2Е4 KHUKRI STEALTH по рисунку 2. Однако дальнейшее повышение количества импульсов в коде приводит к формированию М-последовательностей, что даёт выигрыш не в 1/N раз, а порядка от 1/N1/2 раз до 1/N раз. То есть, необходимо выбирать М-последовательности, дающие наибольший выигрыш в отношении сигнал/шум. В этом случае, чтобы добиться уровня сигнала, не превышающего уровень шумов, при значении 1/N1/2 нам надо иметь накопление импульсов порядка q2=272=729 (28,6 дБ). При этом, при скорости передачи кода в 50 Мбит/сек, мы будем иметь скорость передачи информации 68,5 кбит/сек (при полосе пропускания фильтра в 68,5 кГц чувствительность по формуле (1) будет на уровне -103 дБм). При скорости передачи кодовых символов в 38 Мбит/сек мы имеем скорость передачи информации в 52,1 кбит/сек. Указанная скорость передачи информации сравнима со скоростью для канала управления в радио-модуле по рисунку 1 (56 кбит/сек). Это в 10 раз ниже скорости в режиме шум подобного сигнала (ШПС) при заявленной скорости передачи информации в 550 кбит/сек для БПЛА с известным радиомодемом в устройстве с управлением Е2Е4 KHUKRI STEALTH по рисунку 2. Как отмечалось выше, такая скорость передачи информации в 550 кбит/сек может быть необходима для радиоуправления БПЛА в импульсном режиме при наличии мощных помех и здесь как мы отмечали выше может использоваться цепочка БПЛА в качестве ретрансляторов. Кроме того, надо учесть, что режим в 550 кбит/сек может использоваться и для передачи изображения (эта скорость соответствует режиму видеоконференций), а не для радиоуправления. В этом случае, в устройстве с управлением Е2Е4 KHUKRI STEALTH по рисунку 2 видимо используется код Баркера в 13 бит (+1, +1, +1, +1, +1, −1, −1, +1, +1, −1, +1, −1, +1), что и может дать при полосе пропускания в 7 МГц скорость передачи информации в 540 кбит/сек. В тоже время, выше мы отметили, что чувствительность с вероятностью ошибки в 10-7 по данным приведённым на рисунке 2 в -105 дБм вызывает сомнение, если исходить из формулы (1) и полосы пропускания фильтра в 0,55 МГц, так как по этой формуле получается максимальная чувствительность -94 дБм. Это означает, что отношение сигнал/шум при определении чувствительности по рисунку 2 должно быть меньше в 10 раз по сравнению с формулой (1). То есть, при расчётах использовалось снижение в 10 раз порога отношения сигнал/шум с 27 до 2,7 раз. Отметим, что если даже предположить, что чувствительность для ШПС по рисунку 2 соответствует действительности, то создаваемый радио-модуль может иметь аналогичные характеристики, так как совместимость достигается за счёт снижения в скорости передачи кода с 38-50 Мбит/сек до 7 Мбит/сек программным способом с использованием аналогичной фильтрации. Соответственно, чтобы уменьшить вероятность ошибки, здесь также можно применять избыточный код Виттерби, и можно выявлять ошибки на основе того, что информация в сумме через какое-то количество бит должна иметь сумму чётного или нечётного значения, что позволяет повторить участки с ложной информацией. Это может дать преимущество в режиме QPSK, где скорость передачи информации в 2 раза лучше, но при этом чувствительность в 2 раза хуже, чем при BPSK. Но за счёт избыточного кода можно получить выигрыш в чувствительности и одновременно повысить скорость передачи информации хоть и не в два раза. Понятно, что использование параллельных каналов по частоте для увеличения скорости передачи проигрывает простому режиму QAM в силу того, что приходится использовать при передаче в многочастотном варианте линейный режим усилителя мощности в классе «А», что снижает коэффициент полезного действия (к.п.д) по мощности потребления в 1,625 раз по сравнению с нелинейным классом «В». Поэтому режим QPSK или QAM является более перспективным по сравнению с вариантом использования параллельных многочастотных каналов на передачу из-за более высокого к.п.д. усилителя мощности. Учитывая особенность того, что в БПЛА начальная подстройка по частоте и символам может проводиться ещё до начала полёта, то есть перед запуском БПЛА, то это позволяет увеличить как длительность используемого кода, так и осуществить начальную подстройку по частоте. При этом чувствительность с целью скрытности наличия информации может быть повышена. В этом случае, в режиме поиска, влияние боковых лепестков в корреляционной функции будет только в районе нескольких импульсов в области символьной синхронизации от пика корреляционной функции и не превышать уровня 1/N. То есть, при срыве сопровождения по символам или при переходе на другую частоту поиск также можно ограничить в районе нескольких импульсов при уровне боковых лепестков, не превышающих значение 1/N. Так, при применении кода Баркера в 13 импульсов состоящего из 13 последовательностей кодов Баркера в 7 импульсов (+1, +1, +1, −1, −1, +1, −1) со сменой фазы по операции (XOR), мы будем иметь накопление в 91 импульс на пике корреляционной функции и 13 боковых лепестков с амплитудой в 7 импульсов, которые можно не учитывать, так как поиск после срыва будет происходить в районе максимального пика корреляционной функции. При этом, в пределах нескольких импульсов от пика корреляционной функции значение бокового лепестка не будет превышать величины в 1/N=1/91. Соответственно, при такой длительности кода мы имеем скорость передачи информации 549,450 кбит/сек при скорости передачи кода в 50 Мбит/сек. В этом случае чувствительность по формуле (1) для ШПС достигает величины -94 дБм, то есть сравняется с полосой пропускания фильтра в 549,45 кГц. Иными словами кодирование не приводит к ухудшению чувствительности, и эквивалентно варианту фильтрации непрерывного сигнала без кода, но при этом затрудняет определение наличия сигнала управления средствами радиотехнической разведки (РТР). Это соответствует скорости и чувствительности по формуле (1) при передаче информации для ШПС для БПЛА с известным радио-модулем в устройстве с управлением Е2Е4 KHUKRI STEALTH по рисунку 2. Отметим, что в М-последовательности код может быть увеличен, например, до 1000 импульсов как в системе GPS с уменьшением скорости передачи информации до 50 кбит/сек (режим радиоуправления для радио-модуля по рисунку 1). Для сравнения, помимо радиоуправления, такая скорость передачи информации используется в системе связи Iridium в режиме разделения абонентов по времени, что может быть полезно для многофункционального использования радио-модуля. То есть БПЛА можно будет использовать тогда и для обеспечения скрытной связи при ТЛФ (телефон) в режиме разделения по времени между 10 абонентами со скоростью передачи информации в 2,5 кбит/сек на приём и передачу. С этой целью можно использовать наряду с кодами Баркера в 7 и 13 импульсов в составном виде и код Баркера в 11 импульсов (+1, +1, +1, −1, −1, −1, +1, −1, −1, +1, −1), что даст общий код в 1001 импульс. В этом случае чувствительность приёмника может быть доведена до величины -105 дБм. Собственно для противодействия РТР важно дальнейшее повышение чувствительности с целью скрытности передаваемого сигнала, поэтому для варианта в 10000 импульсов, что соответствует передаче информации в 5 кбит/сек (это также соответствует разговорному режиму ТЛФ) мы будем иметь чувствительность в -115 дБм. Такой режим работы вполне приемлем для помехозащищённого режима не только для управления БПЛА, но и для многофункционального использования в целях связи. Следует отметить, что код накопления в 10000 бит используется в навигаторе GPS в военных целях.
Учитывая, что средства РТР способны определять наличие сигналов по регулярным составляющим спектра за счёт использования узкополосных перестраиваемых фильтров, то помимо использования псевдослучайного кода, с целью повышения помехозащищённости от средств радиоэлектронной борьбы (РЭБ) и скрытности сигнала от средств радиотехнической разведки (РТР) необходимо предусмотреть периодическую смену параметров радиосигнала управления БПЛА. Однако, чем больше и длиннее псевдослучайный код управления, тем сложнее обеспечить условия по быстрой перестройке сигнала управления и когерентной обработке с сохранением высокой чувствительности. Действительно, для обеспечения быстрой фазовой автоподстройки с обеспечением когерентности за максимально короткое время необходимо иметь высокое смещение начальной частоты между передаваемым и принимаемым сигналами. Это обеспечивает короткий период времени подсчёта тактов цифровой дискретизации за период частоты и позволяет за короткое время выставить достаточно точно начальный уровень в интегральном звене обратной связи фазовой автоподстройки частоты (ФАПЧ) с учётом начального значения. Правильный выбор начального уровня интегрального звена повышает устойчивость к шумам и исключает срывы. При этом его уровень должен превышать шумы в пропорциональном звене ФАПЧ с учётом нестационарных колебаний, связанных с использованием узкополосного фильтра обратной связи ФАПЧ. То есть начальная частота определяет и коэффициенты пропорциональности в пропорционально-интегрирующем звене. Кроме того, начальное определение частоты позволяет также выставить начало замыкания ФАПЧ в ноль дискриминационной характеристики, что также снижает вероятность срыва при наличии шумов. Однако максимальное точное измерение смещения частоты между принимаемым и передаваемым сигналами и точное выставление в ноль дискриминационной характеристики при замыкании ФАПЧ ограничивается частотой цифровой дискретизации, на основании которой проводится подсчёт количества тактов за полупериод и вычисляется необходимый уровень интегрального звена ФАПЧ. В приёмнике GPS при бинарном квантовании тактовая частота дискретизации достигает 200 МГц. При этом полоса пропускания фильтра обратной связи должна обеспечивать такое отношение сигнал/шум, чтобы влияние помех на точность определения частоты исключало срыв сопровождения. Кроме того, при использовании длинных кодов с накоплением, когда частота смещения имеет период по времени сравнимый с длительностью кода, мы не можем применить режим, который используется в GPS, где подстройке по частоте Доплера предшествует подстройка по коду из-за изменения фазы связанной с частотой Доплера. Надо отметить, что полоса пропускания узкополосного фильтра ФАПЧ выбирается исходя из выделения дискриминационной характеристики, и это значение превосходит частоту смещения (Доплера) в 4 раза (пилообразная дискриминационная характеристика). Это означает, что введённые нами дополнения для быстрой ФАПЧ, в виде предварительного определения частоты и замыкание ФАПЧ в момент прохождения через ноль дискриминационной характеристики, не влияют на сам процесс подстройки по частоте и фазе который был использован ранее. Они лишь улучшают характеристики по исключению срыва сопровождения на ранних стадиях захвата. Наглядно данную зависимость можно увидеть на рисунках 4 и 5, для вариантов накопления кода в 64 бита, и для кода в 1024 бита с частотами смещения соответственно в 23 кГц и 9 кГц.
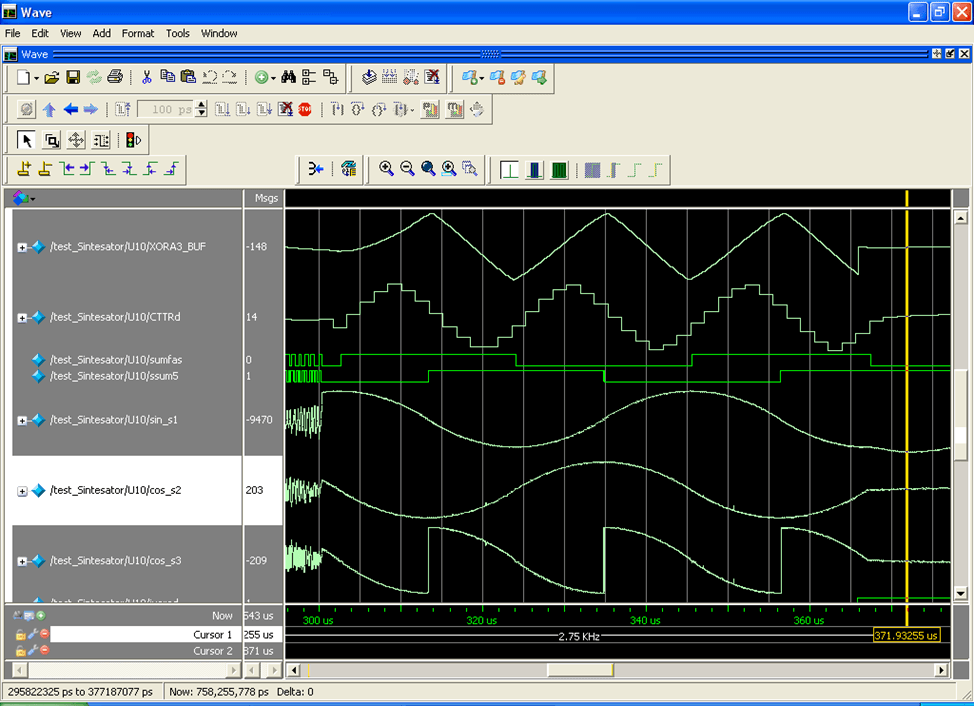
Рис. 4. Вариант накопления кода в 64 бита с частотой смещения в 23 кГц
Здесь под обозначением cos_s3 показана предварительная пилообразная дискриминационная характеристика с цифровой фильтрацией на основе 7 цифровых звеньев задержки после получения режима символьной синхронизации по коду в 64 бита при 38 Мбит/сек, что соответствует полосе пропускания аналогового фильтра в 5,4 МГц. То есть, мы здесь при наличии кода BPSK в 64 бита можем принимать телевизионный сигнал в полосе 5,4 МГц при использовании амплитудной модуляции. Под обозначением XORA3_BUF представлена дискриминационная характеристика с использованием непрерывной цифровой фильтрации в полосе 83 кГц которая получается из сигнала с обозначением cos_s3 с изменением фазы. Для сравнения приведена дискриминационная характеристика под обозначением CTTRd которая получается на основе накопления 64 бит со сбросом. Из рисунка 4 видно, что режим накопления со сбросом приводит к неточности определения частоты смещения на величину интервала между сбросами. Более наглядно это видно на рисунке 5 при 1024 битах кода.
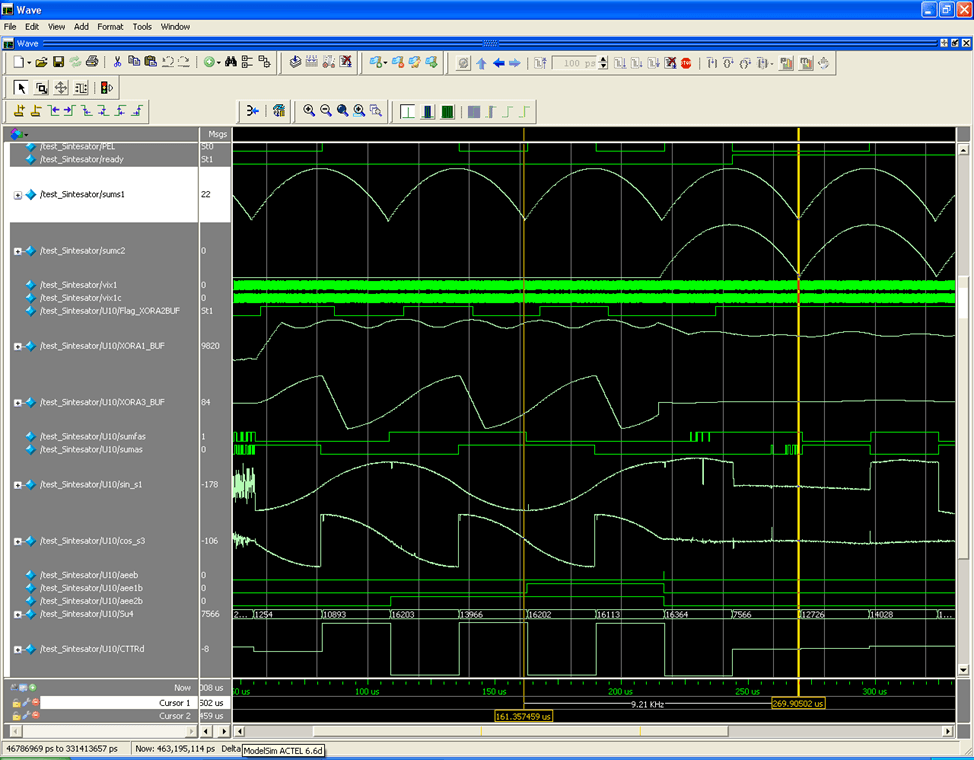
Рис. 5. Вариант накопления кода в 1024 бита с частотой смещения в 9 кГц
Здесь обозначение CTTRd соответствует накоплению со сбросом через 1024 импульса при скорости передачи в 38 Мбит/сек. Величина XORA3_BUF определяет сигнал дискриминационной характеристики, на основе которого осуществляется подстройка по частоте. Ниже на рисунке 6 рассмотрен вариант влияния частоты Доплера на значения по накоплению сигнала при коде в 1024 бит.
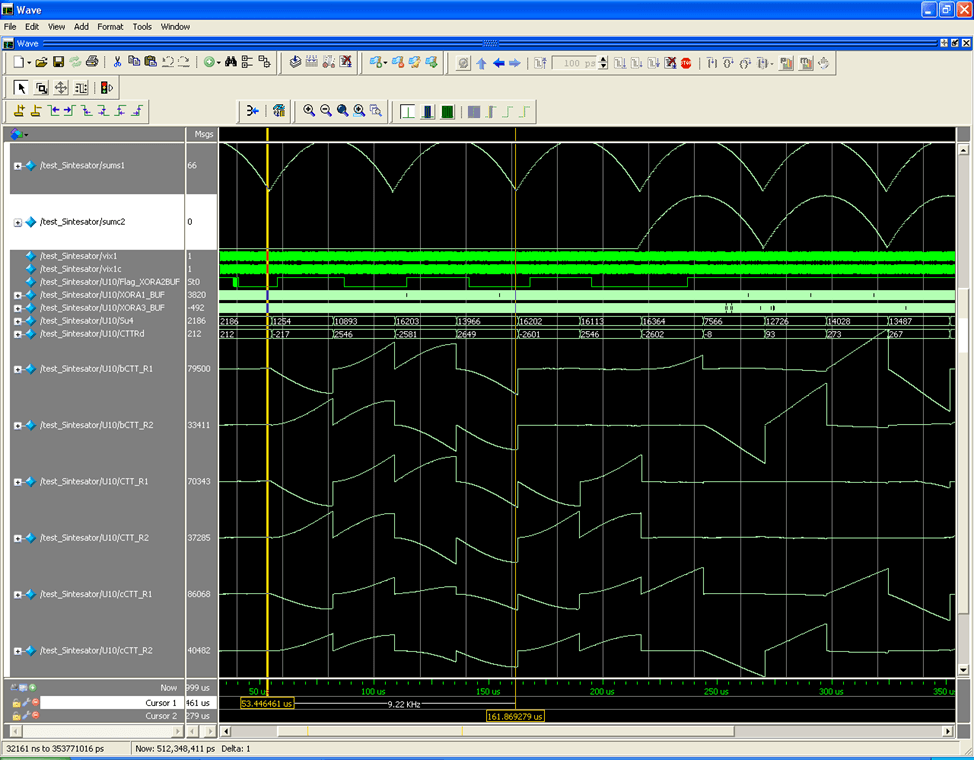
Рис. 6. Результаты накопления сигнала при коде в 1024 бит со скоростью передачи в 38 Мбит/сек во время определения частоты смещения в 9 кГц (частота Доплера) по шести каналам по синусу (bCTT_R1, CTT_R1, cTTR_R1) и косинусу (bCTT_R2, CTT_R2, cTTR_R2)
Из этого рисунка 6 видно, что для обеспечения правильного накопления необходимо, чтобы время накопления было меньше четверти периода частоты Доплера до подстройки. После подстройки по частоте Доплера мы имеем линейное накопление.
Понятно, что исходя из результата математического моделирования в ПЛИС по результатам от рисунков 4 - 6 для достижения наиболее лучших характеристик по скорости подстройки и устойчивости к помехам желательно использовать вариант непрерывной цифровой фильтрации без накопления со сбросом. Однако непрерывная фильтрация при сужении полосы пропускания связана с необходимостью использования большого количества цифровых звеньев на основе задержек, а это ограничивается наличием количества логических элементов в ПЛИС, а также должно быть выполнено с обеспечением правильного размещения логических элементов в ПЛИС с минимальными задержками для исключения рассогласований при накоплении. Поэтому необходимо искать компромисс, при котором в случае большого накопления псевдослучайного кода вначале используется режим накопления со сбросом, а затем непрерывная цифровая фильтрация. И это обеспечивает наиболее быструю реакцию цепи обратной связи ФАПЧ при изменении частоты Доплера. Отметим, что в режиме начальной синхронизации можно использовать код малой длительности, так как расстояние от БПЛА до пункта управления будет незначительным, а далее код можно увеличить по заданной программе с улучшением чувствительности. Предположим, что мы используем код в 1024 бит со сбросом при скорости передачи символов кода в 38 Мбит/сек. Для улучшения достоверности информации после накопления и исключения необходимости синхросигнала используем код Манчестер, что эквивалентно общей длительности в 2048 бит. Далее этот накопленный сигнал используем в режиме его подачи на цифровые фильтры по синусу и косинусу, например, в 76 цифровых звеньев задержки. На выходе таких цифровых фильтров мы можем выделить по первому фильтру (он связан с выдачей сигналов от АЦП по синусу) сигнал информации для радиоуправления в 250 бит/сек, а по второму фильтру (сигналы от АЦП по косинусу) сигнал для ФАПЧ. На следующем шаге достоверность сигнала можно также поднять за счёт избыточного кода Виттерби, что конечно уменьшит скорость передачи информации, но обеспечит улучшение чувствительности за счёт исправления ошибок. И наконец, последним этапом по исключению ошибок можно использовать передачу информации с наличием контрольных сумм по некоторому количеству бит информации по чётному или нечётному значению суммы. Напомним, что минимальная информация при радиоуправлении для радио-модуля по рисунку 1 ограничивается величиной в 56 кбит/сек, а это означает, что мы в разрабатываемом устройстве можем иметь чувствительность в 224 раз лучше (23,5 дБ) за счёт оптимальной фильтрации. Пример выделения сигналов на основе нашей математической модели показан на рисунке 7.
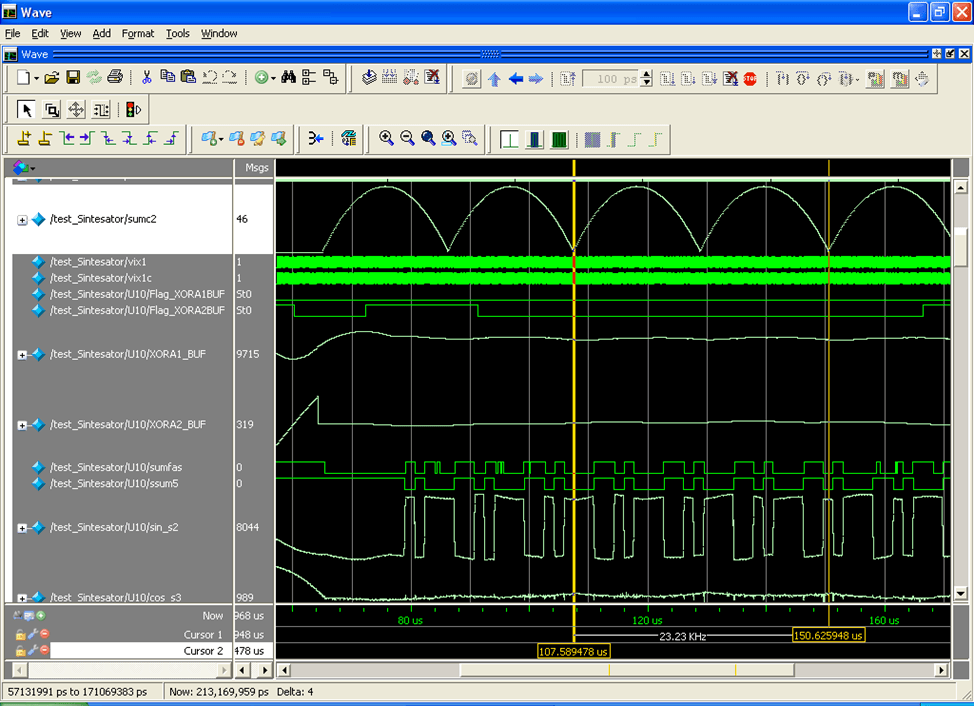
Рис. 7. Выделение BPSK на основе непрерывного цифрового фильтра по каналу синуса и выделение сигнала ФАПЧ по каналу косинуса при частоте Доплера в 23 кГц и передаче сигнала информации в 5,4 Мбит/сек. Это соответствует скорости передачи телевизионного изображения в аналоговом виде
Надо отметить, что с целью уменьшения регулярных составляющих в спектре сигнала радиоуправления с невозможностью выделить сигнал средствами РТР по второй гармонике в узкополосном фильтре можно использовать QPSK сигнал. Пример использования такого сигнала при приёме с помощью непрерывных цифровых фильтров по синусу и косинусу показан на рисунке 8.
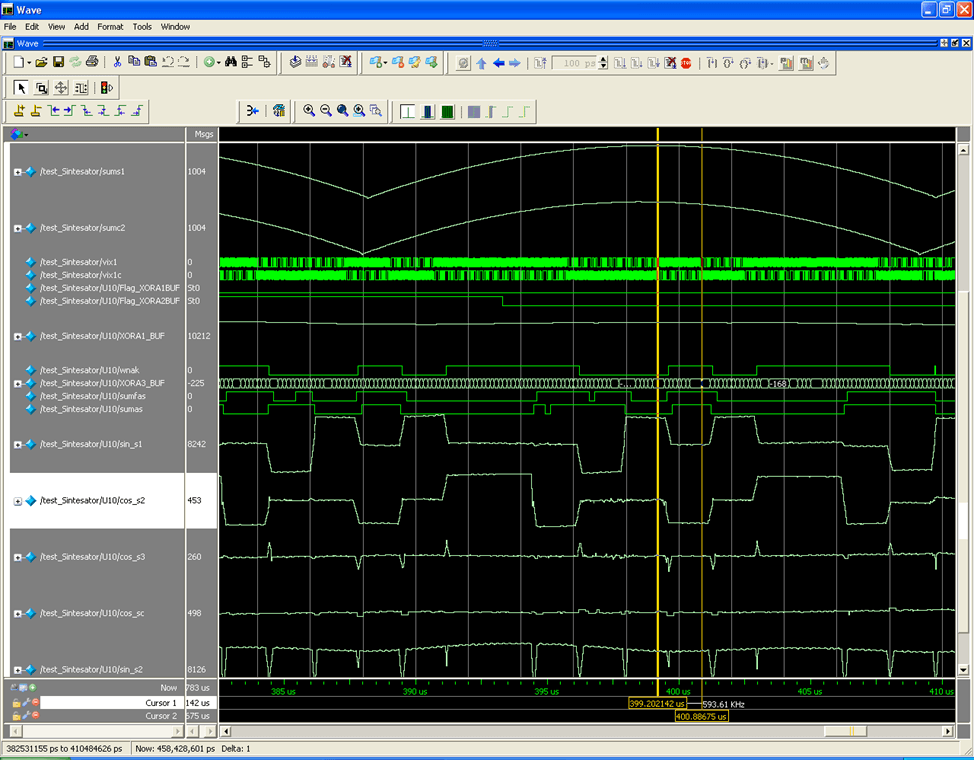
Рис. 8. Выделение информации на выходе непрерывных цифровых фильтров по синусу и косинусу при использовании QPSK сигнала при коде в 64 бита
Здесь пиковые значения в результате перескока фазы в канале управления ФАПЧ по обозначению cos_s3 убираются за счёт ограничения по скорости изменения, что видно по сигналу с обозначением cos_sc.
Мы рассмотрели варианты подстройки по частоте смещения и режимы оптимального выделения сигнала информации, как с наличием кодирования, так и без. Однако помимо подстройки по частоте необходимо также обеспечить синхронизацию по символам, так как длительность приходящего импульса будет не совпадать с длительностью импульса в радио-модуле из-за наличия частоты Доплера. Соответственно здесь также надо учитывать, что увеличение длительности накапливаемого кода ограничивается частотой Доплера и длительность кода должна быть такой, чтобы разность длительности импульсов в приёмнике и передатчике из-за частоты Доплера могла быть вовремя устранена. Скорость символьной синхронизации также важна и в целях навигации. Так как для исключения ошибок дискретизации по теореме Котельникова мы используем в бите информации с АЦП 3 цифровых дискретных отсчёта со сдвигом по времени 8,77 нсек (114 Мгц), то с учётом обеспечения дискриминационной характеристики между двумя соседними импульсами при скорости передачи в 38 Мбит/сек мы имеем шесть параллельных каналов по накоплению кода (3 такта×2 импульса). На основании этих 6 значений делается вывод о выборе такта дискретизации, который имеет наименьшее расхождение с фронтом приходящих импульсов. Так как мы должны иметь символьную синхронизацию и на период выявления начальной частоты Доплера в ФАПЧ, то общее количество параллельных каналов с учётом наличия АЦП как по синусу, так и по косинусу достигает двенадцати. Сам принцип символьной синхронизации для режима BPSK показан на рисунке 9.
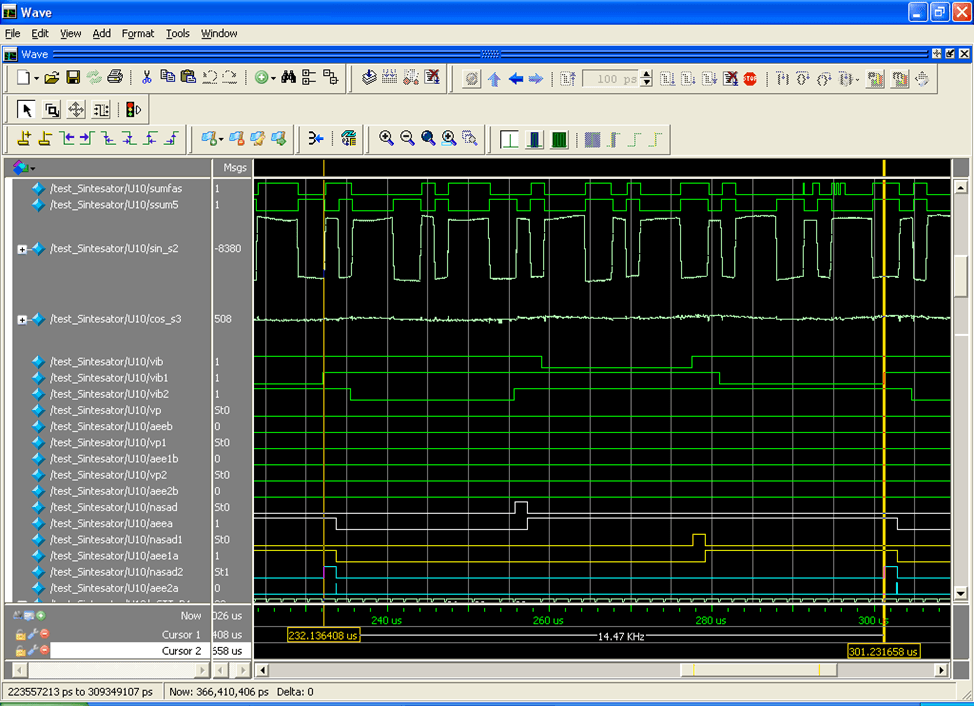
Рис. 9. Принцип символьной синхронизации, реализованный в математической модели
Здесь длительность приходящего импульса кода несколько больше импульса кода в ПЛИС, и символьная синхронизация осуществляется на основании импульсов под обозначением nasad, nasad1, nasad2 по которым определяется необходимый сдвиг на длительность символа соответствующего такта дискретизации. При наличии приходящего импульса кода по длительности меньше импульса кода в ПЛИС будут задействованы импульсы с обозначением vp, vp1, vp2. По значениям, vib, vib1, vib2 осуществляться сравнение амплитуд в каналах на основе накопленных значений кода и принимается решение. Сам принцип накопления в данном случае на 64 импульса показан на рисунке 10.
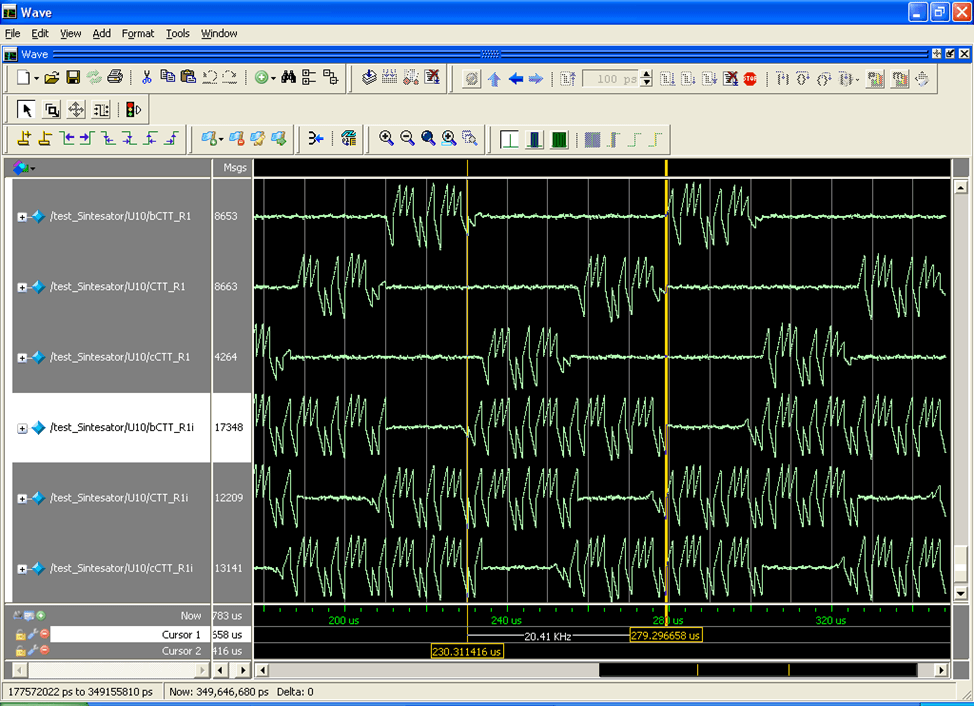
Рис. 10. Результаты накопления в 6-ти каналах от АЦП по синусу при дискретизации в 114 МГц на основании чего принимается решение по выбору такта дискретизации. То есть отсчёт начала приходящего импульса идёт от такта дискретизации наиболее близко стоящего от фронта приходящего сигнала. Соответственно принцип наличия перестройки виден по прерыванию накопления в соответствующих каналах
В результате такой оптимальной подстройки на рисунке 11 показано выделение ФКМ сигнала (BPSK) при коде в 64 импульса и частоте Доплера в 23 кГц.
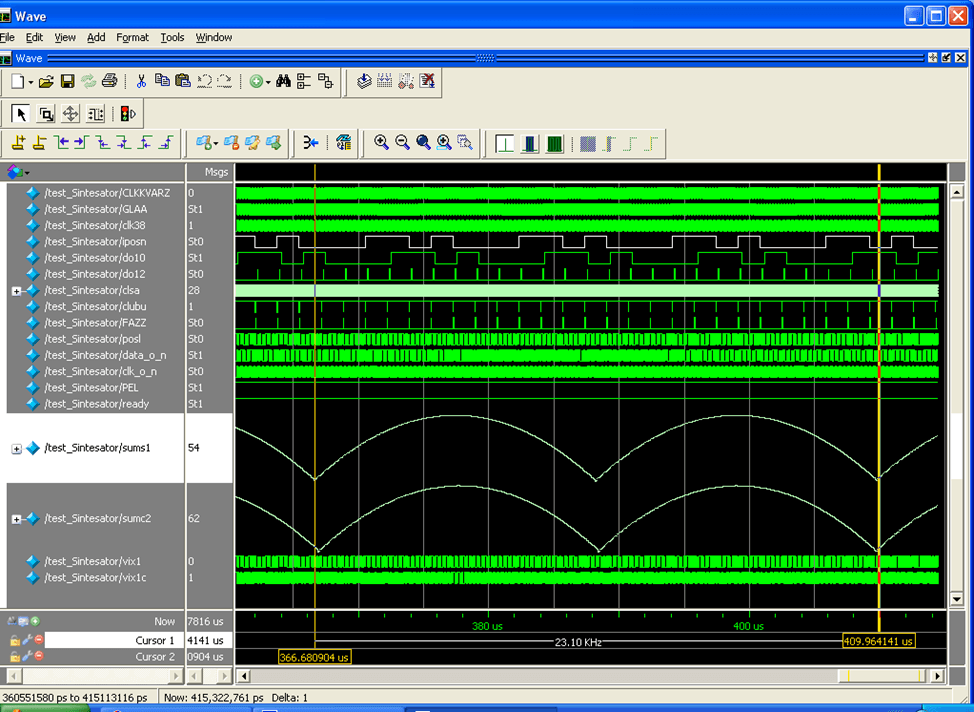
Рис. 11. Сравнение информации входного ФКМ сигнала iposn (обозначен белым цветом) с кодом после выделения в ПЛИС do10 (обозначен зелёным цветом) при наличии символьной (do12-синхроимпульс) и частотной синхронизации
Здесь наличие символьной синхронизации определяется по импульсам с обозначениями clubu и FAZZ. При этом импульс FAZZ это не импульс наиболее близко стоящий к фронту приходящего сигнала, а один из 12 тактов дискретизации, который повторяется через количество накапливаемых символов в коде.
Вариант накопления для 1024 бит со скоростью передачи в 38 Мбит/сек при 9 кГц частоты Доплера в режиме QPSK показан на рисунке 12 с учётом символьной синхронизации.
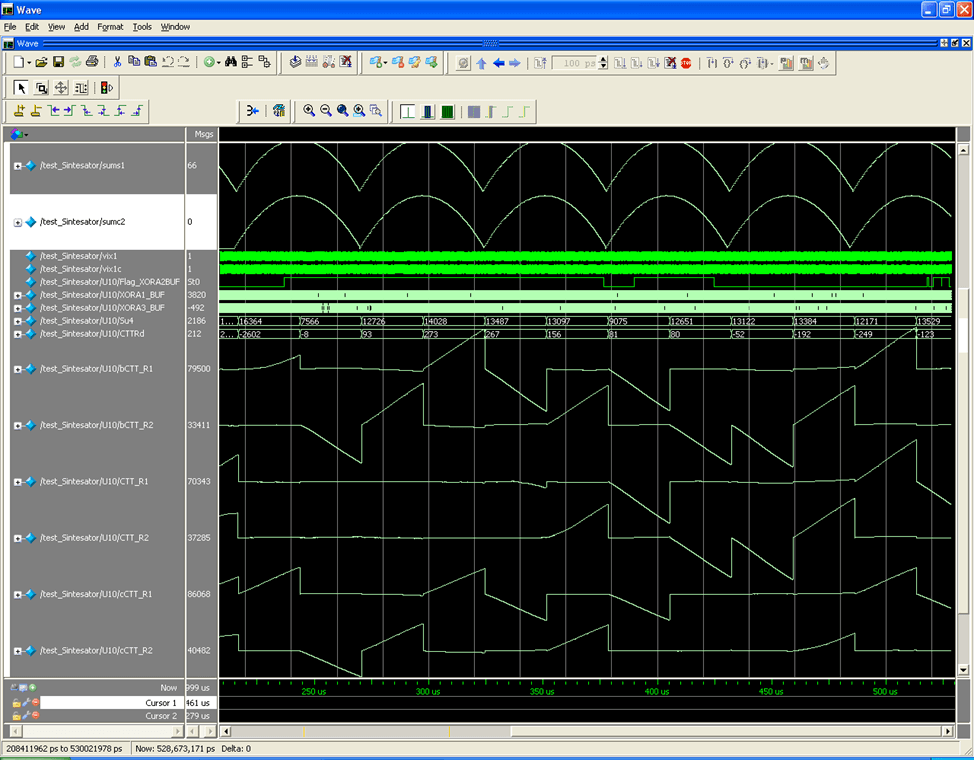
Рис. 12. Результаты накопления в режиме QPSK для кода в 1024 бит с учётом символьной синхронизации
В случае кода в 1024 бита параметры изменения длительности приходящего сигнала должны быть меньше, чем для варианта кода в 64 бита. Более детально результаты символьной и частотной синхронизации с указанием частоты дискретизации и соответствия приходящего кода с выделяемым в ПЛИС кодом показаны на рисунке 13.
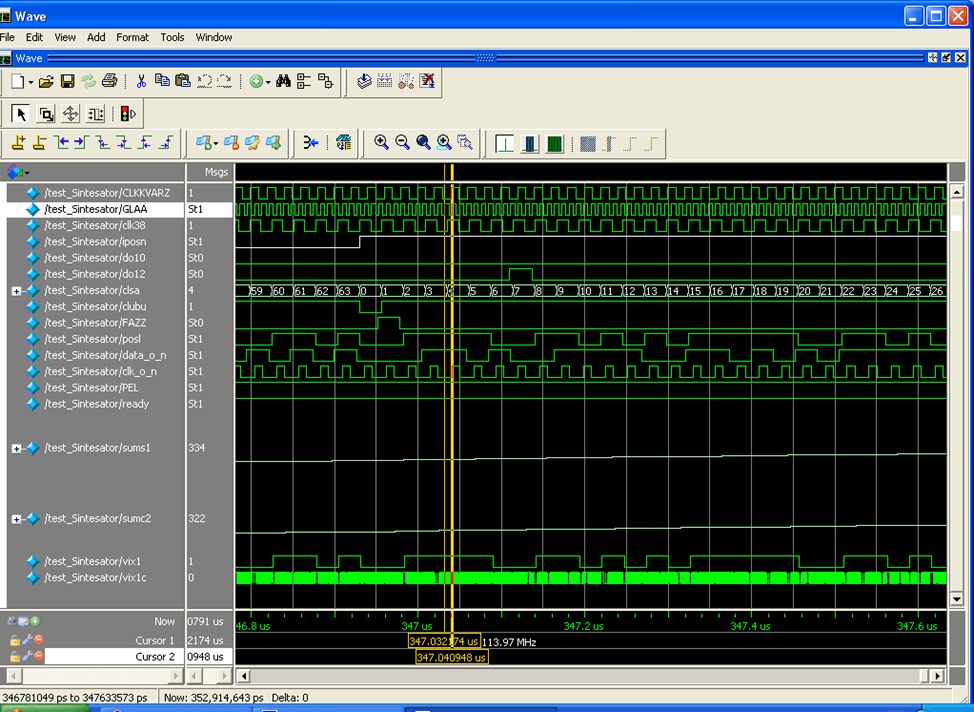
Рис. 13. Подтверждение того, что подстройка осуществлена при 64 импульсах кода с тактовой частотой оцифровки входного сигнала в ПЛИС в 114 МГц
Режим подстройки виден по сигналам на входах АЦП по синусу и косинусу с обозначением vix1, vix1c. В vix1 виден выделяемый сигнал информации. Значение vix1c относится к каналу, определяющему управление по ФАПЧ. Полученный результат от выделения входного кодового сигнала posl (ШПС) в ПЛИС отображён в виде сигнала data_o_n с тактом выделения информации clk_o_n. Количество накапливаемых импульсов определяется по значению clsa. Значение GLAA отражает частоту дискретизации в 114 МГц.
Надо отметить, что, так как постановка помех системе GPS (ГЛОНАСС) не представляет сложности, достаточно использовать переизлучение спутникового сигнала, то исключение определения местоположения БПЛА приводит к неточности наведения на цель. Это означает, что в целях помехозащищённости желательно использовать дополнительную систему навигации, которая имеет устойчивость к шумам. В [3] был подробно рассмотрен вариант навигации по реперным точкам с учётом помехозащищённости за счёт изменяемых параметров сигнала при запросно-ответной системе. При этом с учётом частоты дискретизации в 114 МГц и использовании сплайнов по амплитуде сигнала, точность определения местоположения может доходить до величины менее одного метра. Приведённые результаты математического моделирования с учётом оптимизации параметров показывают, что разрабатываемое устройство на основе предлагаемой программы позволяет решить проблемы, как в плане помехозащищённости, так и в плане многофункционального использования радио-модуля. Действительно, современное развитие радиотехники связано именно с многофункциональностью программного обеспечения, так как в плане повышения чувствительности есть предел, связанный с температурой, а передаваемая мощность также ограничивается потерей мощности на нагрев. Использование многофункциональных программ обеспечивает унификацию и сокращает издержки при массовом изготовлении устройств. В данной статье была отражена необходимость создания программы, которая обеспечивала функции для радиоуправления, навигации и радиосвязи, так как именно на основе этих функций строится надёжная помехозащищённость. В силу того, что при разработке программы (это видно по приведённым результатам моделирования) использовались классические методы выделения и когерентной обработки сигнала с учётом перестройки параметров с наличием быстрой ФАПЧ при символьной синхронизации, то альтернативы другого подхода просто нет.
