
В соответствии с [1, 2, 3, 4] мы установили оптимальные радиотехнические параметры для радио-модуля БПЛА и первичные возможные функциональные схемы с учётом использования в широком диапазоне частот для радиоуправления, радиосвязи и навигации с определением максимума по скрытности передаваемого сигнала для средств радиотехнической разведки (РТР). При этом максимальная скорость передачи информации в режиме BPSK была определена в 38-50 Мбит/сек, а в режиме QAM в 114 -150 Мбит/сек, тактовая частота дискретизации должна быть от 114 до 150 МГц, аналого-цифровой преобразователь (АЦП) должен иметь разрядность в 13-14 бит. Кроме того, мы показали возможность размещения радиоэлементов для узлов БПЛА на платах при наличии размеров не более чем у аналогов и прототипов и привели первичные соответствующие функциональные схемы. Однако теперь настало время более детально рассмотреть оптимизацию радио-модуля БПЛА на основе выбора конкретной электрической схемы и конструктивного размещения радиоэлементов с учётом многофункциональности и ширпотреба, так как это позволяет значительно сократить издержки по изготовлению и быстро осуществить экспериментальную проверку режимов работы. Прежде, чем приступить к обоснованию оптимизации нового конструктивного исполнения, отметим, что ещё в мае 2017 года в АНО «НТИЦ «Техком» были разработаны электрические схемы, а также топология двух отдельных плат, которые обеспечивали функции радио-модуля при использовании программы в ПЛИС. Здесь осуществлялась обработка сигнала при приёме в режиме BPSK (фазовая манипуляция) информации в 38 Мбит/сек, с учётом доплеровского смещения частоты и передачей сигнала в 38 Мбит/сек. Топология размещения радиоэлементов на этих двух платах приведена на рисунке 1 и 2.
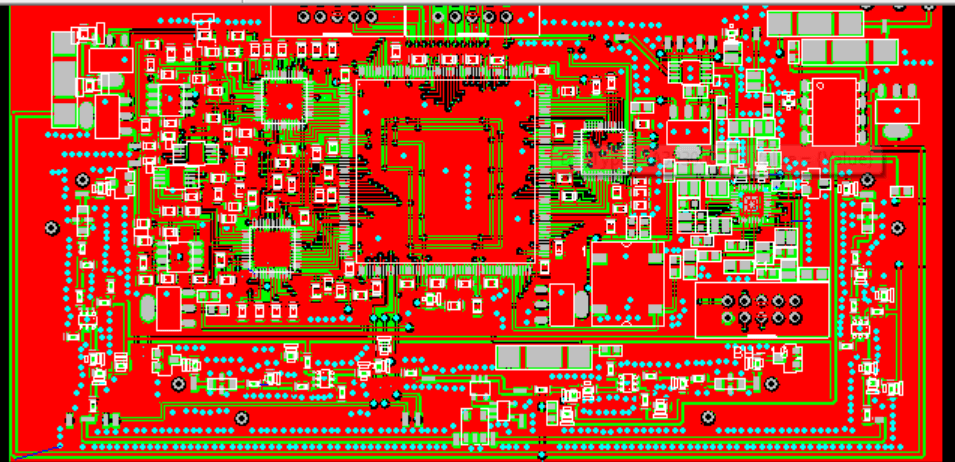
Рис. 1. Топология первой платы с дифференциальными усилителями перед АЦП, ПЛИС, наличием синтезатора частот, ЦАП, четырёх МШУ, делителем частоты на четыре и кварцевым генератором
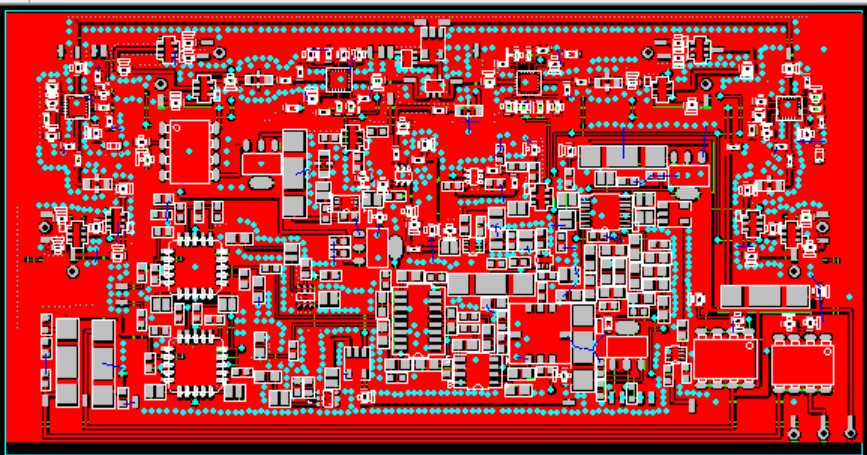
Рис. 2. Вторая плата аналоговой части приёмо-передатчика с размещением 4-х усилителей мощности (УМ), балансным модулятором, демодулятором, смесителем, логарифмическим усилителем, делителем частоты на 2
На основе электрических схем и топологии были изготовлены два экспериментальных образца радио-модуля по идее новой оптимизированной конструкции с учётом радиоэлементов ширпотреба и были проведены испытания. При этом размеры устройства по длине соответствовали величие в 14 см, а по ширине в 7 см (рисунок 3).
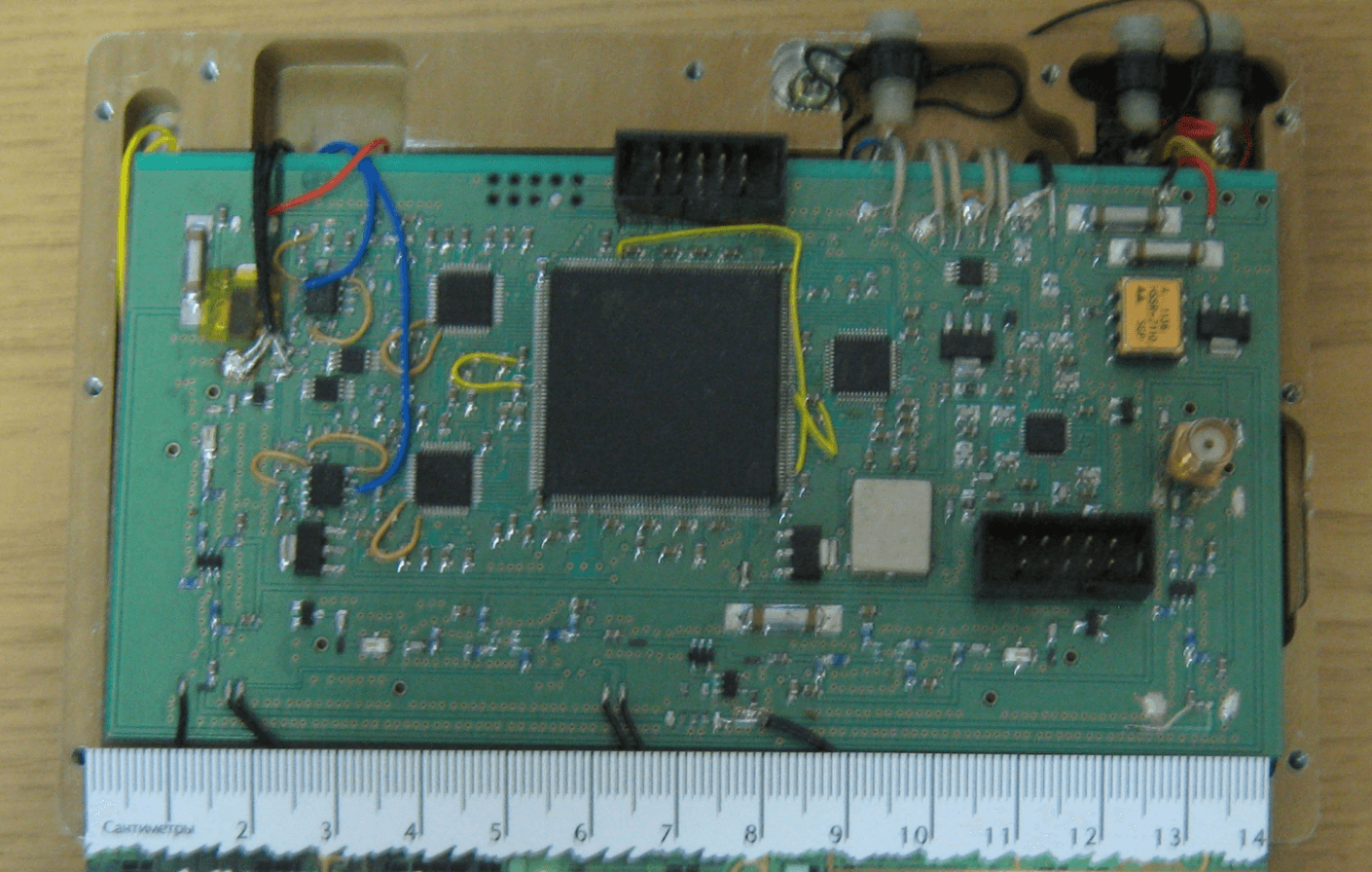
Рис. 3. Первый образец мобильного устройства
Проверка осуществлялась под протокол на рабочем месте, приведённом на рисунке 4.
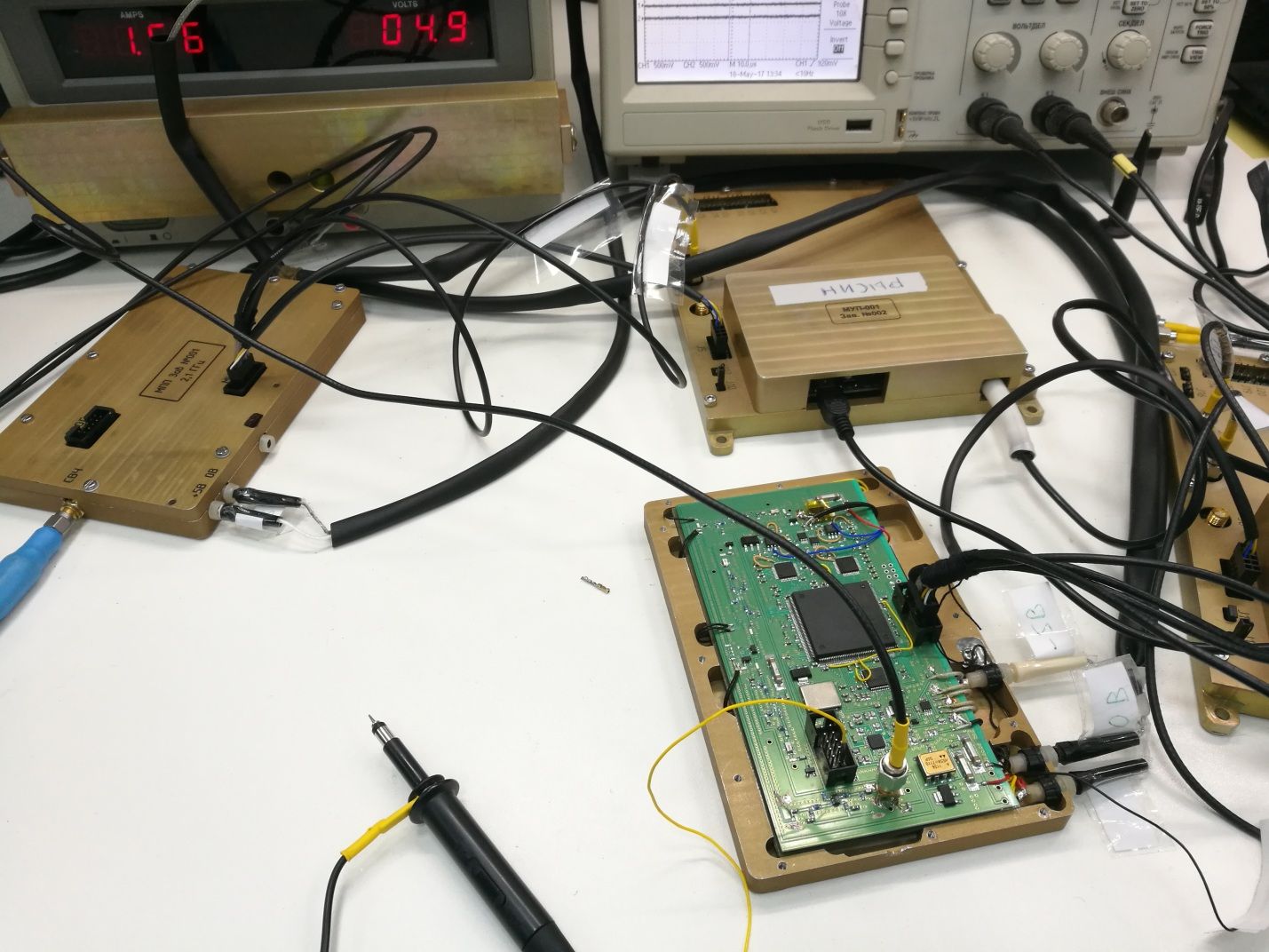
Рис. 4. Общий вид рабочего места
Испытания проводились на выделение смещения частот по Доплеру и на приём сигналов информации типа BPSK (фазо-кодо-манипулированный сигнал) в 38 Мбит/сек. На рисунке 5 показано выделение частоты смещения по Доплеру в 10 кГц при уровне сигнала на одном из 4-х входов приёмника в минус 86 дБм.
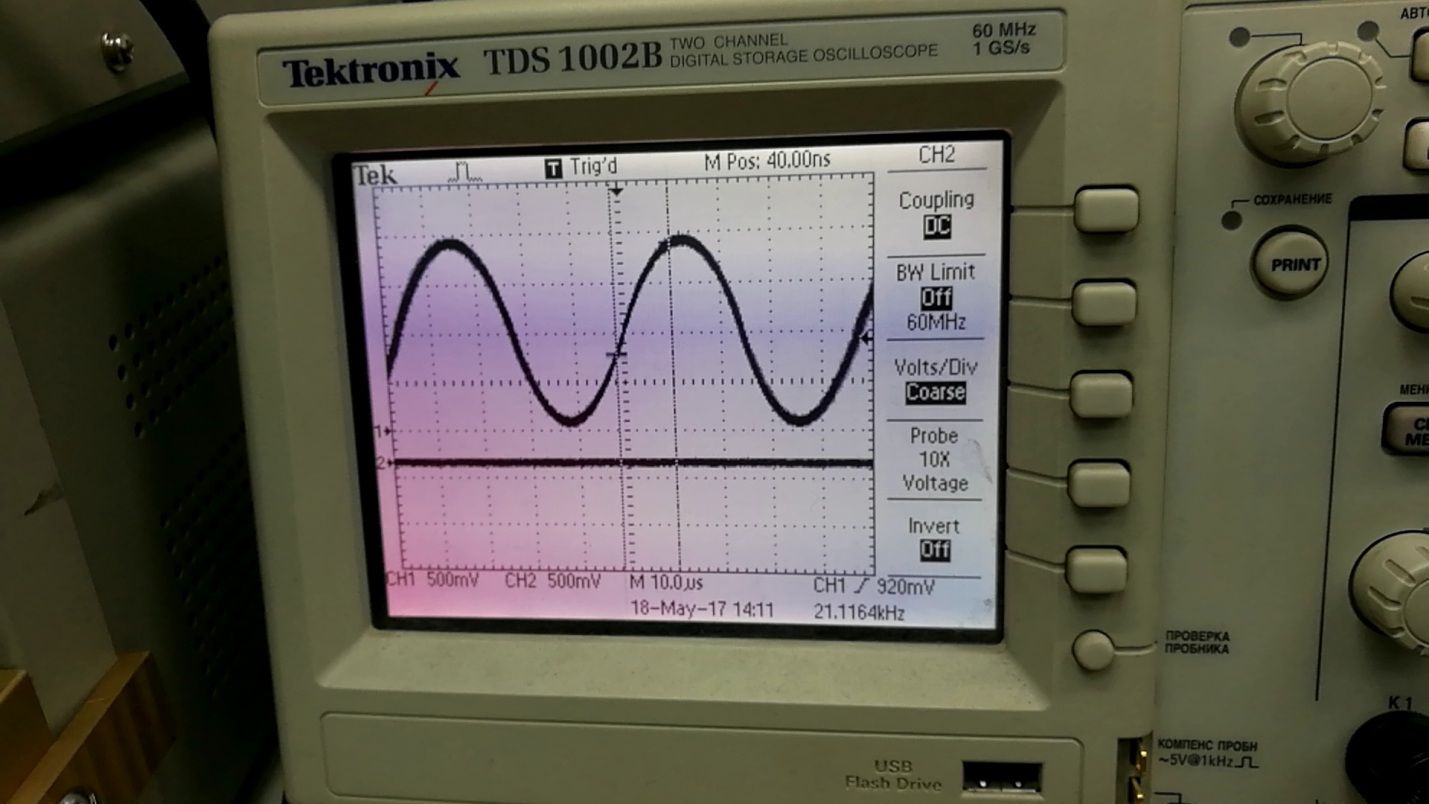
Рис. 5. Выделенная частота доплеровского смещения при приеме на уровне сигнала на входе минус 86 дБм
На рисунке 6 отображён принимаемый сигнал с учётом смещения по частоте Доплера при минус 86 дБм.
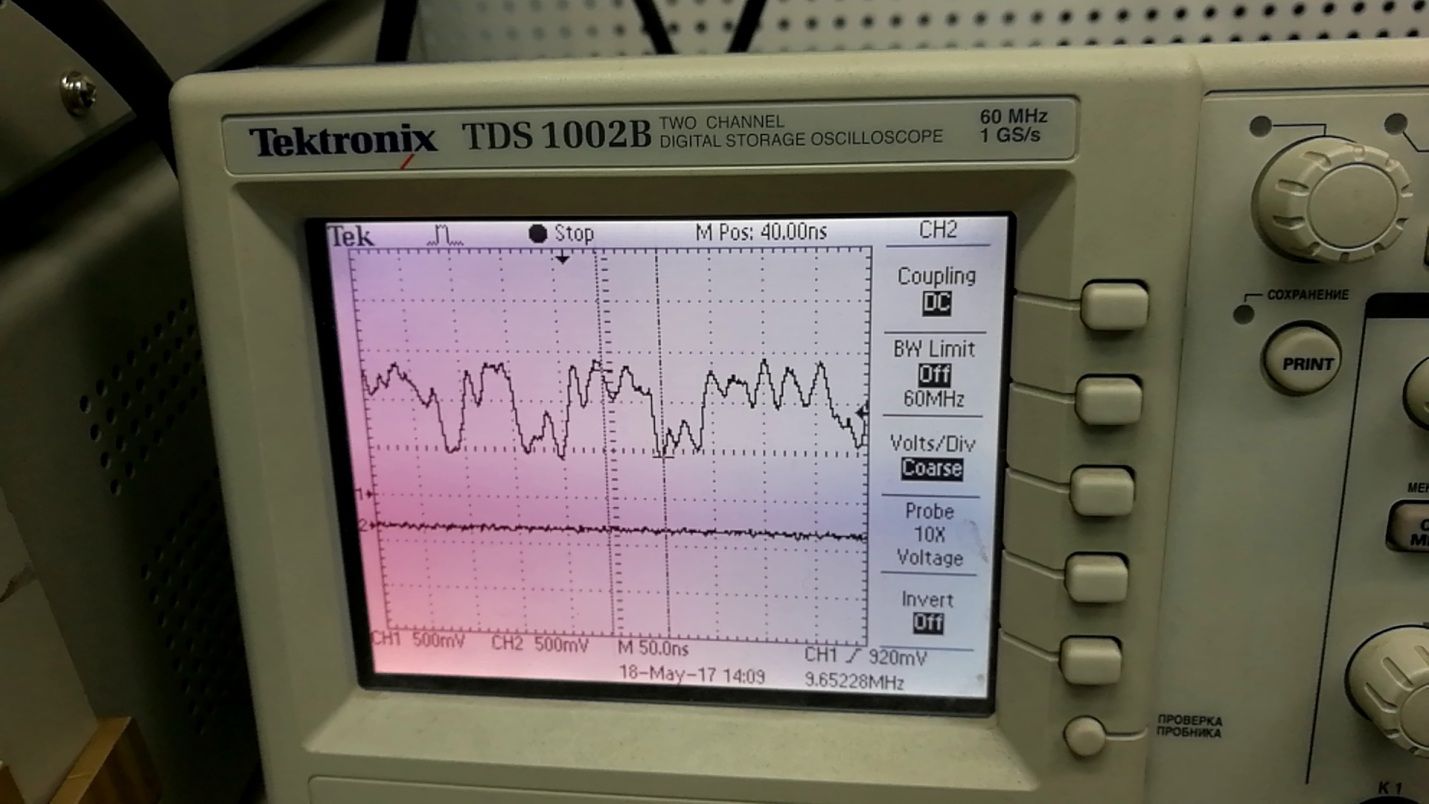
Рис. 6. Принимаемый сигнал BPSK в 38 Мбит/сек с учётом смещения по частоте Доплера при минус 86 дБм по одному входу МШУ
На рисунке 7 отображены результаты принятия изображения.
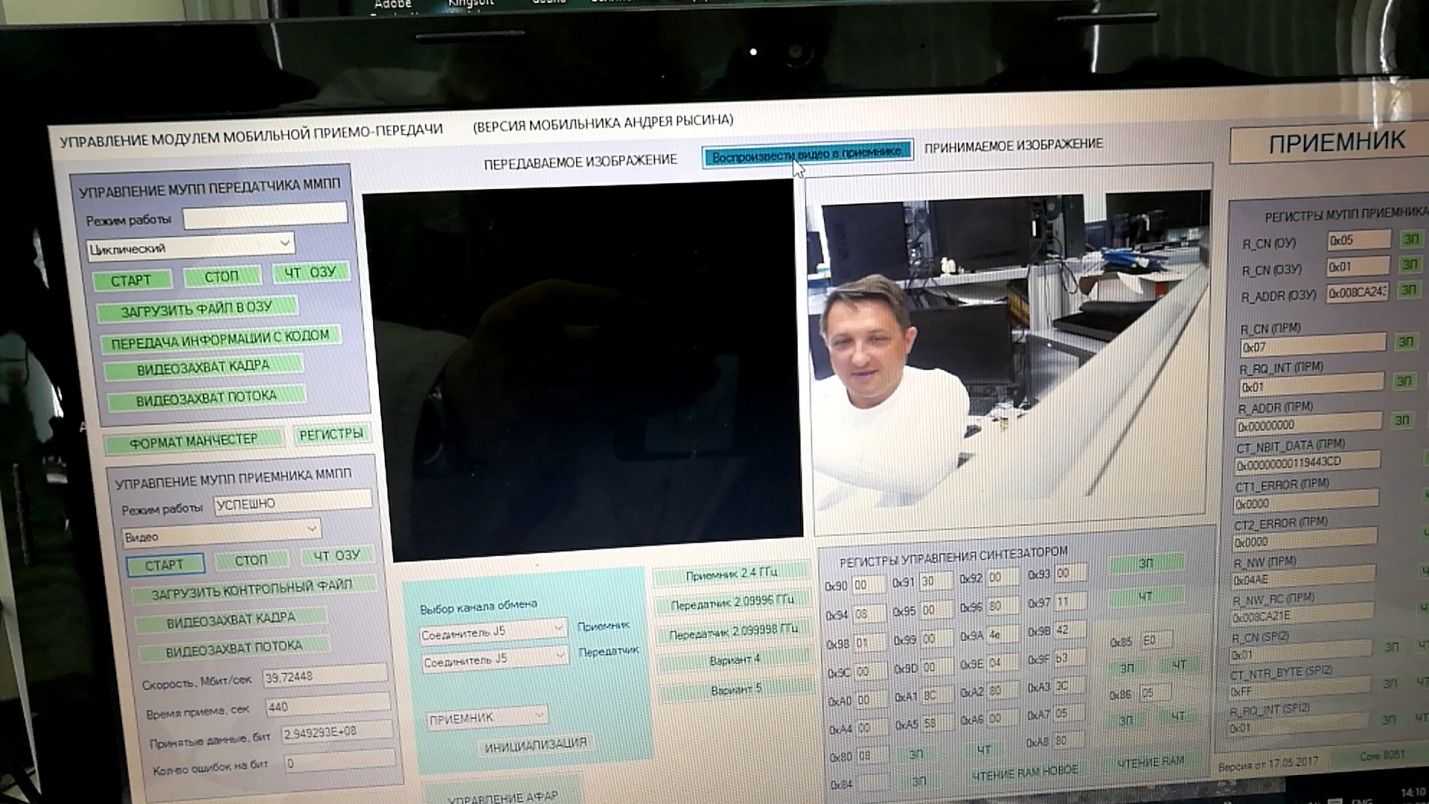
Рис. 7. Результаты принятия изображения с учётом смещения по частоте Доплера в 10 кГц
Однако данное техническое решение не нашло поддержки, и не были даже выделены деньги на продолжение работ, а фирма подверглась разорению с изъятием помещений и измерительной аппаратуры. На сколько такое многофункциональное устройство для связи было перспективно и важно стало понятно только сейчас с проведением специальной военной операции (СВО), когда на основании санкций Россию лишили возможности покупать аналогичную зарубежную аппаратуру. При этом эта зарубежная аппаратура не позволяла обеспечить помехозащищённость, так как имеет вполне однозначные алгоритмы работы. Действительно, так как одной из функций БПЛА является необходимость обеспечения надёжной и скрытной связи на театре военных действий (ТВД) для войсковых подразделений в условиях помех, то предлагаемый радио-модуль, на основе вшиваемых в ПЛИС программ, мог быть использован для обеспечения радиоуправления БПЛА в сочетании с возможностью применения для обычной мобильной, спутниковой связи и Интернет и также в целях гражданского потребления. В принципе на основе предлагаемого радио-модуля можно формировать и активные фазированные решётки (АФАР).
И сейчас предлагаемый радио-модуль опережает по характеристикам существующую аналогичную аппаратуру по программному обеспечению и радиотехническим параметрам, о чём можно судить из сравнения, которое мы сделали в [1-4]. Далее мы покажем, что предлагаемый радио-модуль является наиболее оптимизированным по конструкции по сравнению с известными аналогичными устройствами, и именно такая конструкция обеспечивает дополнительные возможности по помехозащищённости и многофункциональности.
Понятно, что тенденция дальнейшего развития мобильных устройств связи связана с повышением чувствительности и мощности радио-модулей, а также микроминиатюризацией. При этом, при обеспечении оптимальной обработки сигнала, чувствительность приёмного тракта сильно зависит от температуры нагрева первого малошумящего усилителя (МШУ), и это противоречит возможности повышать передаваемую мощность в усилителе мощности (УМ) из-за нагрева при близком расположении к МШУ. Поэтому первое требование касается того, что желательно располагать МШУ подальше от усилителя мощности (УМ) передающего тракта и других устройств, имеющих сильный нагрев. Однако, на современном этапе конструктивное исполнение по функциональной схеме по рисунку 8 не позволяет это сделать.
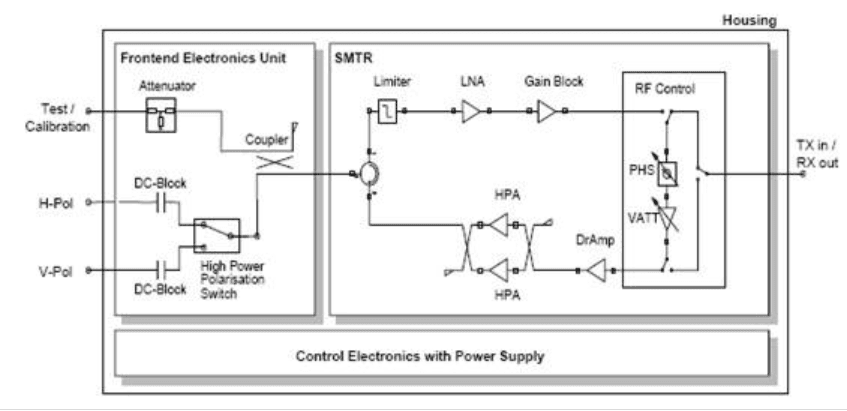
Рис. 8. Функциональная схема приёмо-передающего модуля для АФАР Х диапазона
Из вида конкретного СВЧ модуля, который показан на рисунке 9 мы имеем достаточно близкое расположение приёмного малошумящего усилителя (МШУ) с усилителем мощности (УМ), передающим сигнал информации.
Рис. 9. СВЧ модуль Х-диапазона
Кроме того известно, что отношение сигнал/шум можно повысить конструктивно за счёт увеличения площади приёмной антенны. Однако, это связано одновременно и с повышением коэффициента направленного действия (КНД), а это противоречит требованию обеспечения всенаправленного приёма. При этом растут и размеры антенны. Поэтому здесь необходим поиск компромисса, когда достигается оптимум между размерами антенны с соответствующим КНД и приёмом сигнала со всех направлений. Учитывая, что в первоначальный момент вхождения в связь может использоваться кодовый сигнал с накоплением до десятков тысяч бит как, например, в системе навигации GPS, а далее, с учётом навигационных значений, антенна может быть выставлена по максимуму в нужном направлении, то логично искать вариант получения более больших размеров площади антенны, исходя из площади поверхности применяемых мобильных радиоустройств ширпотреба, с учётом используемых несущих частот радиосигнала. Массовый потребитель сейчас использует смартфоны для связи и Интернет, например, Galaxy S22 имеет экран по диагонали 6,1 дюйма (15,5 см) / 146x70,6x7,6 мм, а размеры Samsung Galaxy A51 имеют в ширину 73.6 мм, в длину 158.5 мм и толщиной 7,9 мм. При этом, исходя из требований по Интернет, идёт смещение применения несущих частот в область более высоких значений. Например, диапазон частот, используемый для мобильной связи известными операторами представлен в таблице.
Таблица
Несущие частоты и диапазоны известных операторов
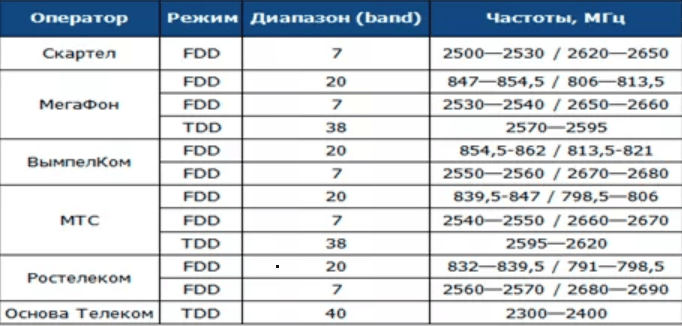
Из таблицы мы видим, что диапазон используемых несущих частот предоставленных ГКРЧ лежит в пределах от 2,3 ГГц до 2,7 ГГц, а это означает перспективу от использования патч-антенн, которые в этом случае вписываются в размеры смартфонов.
Соответственно мы должны провести сравнение по габаритам нашего предлагаемого конструктивного решения радио-модуля с известными аналогами. Так, известен радио-модуль TRX-8D, который предполагается запустить в серийное производство, и он показан на рисунке 10.
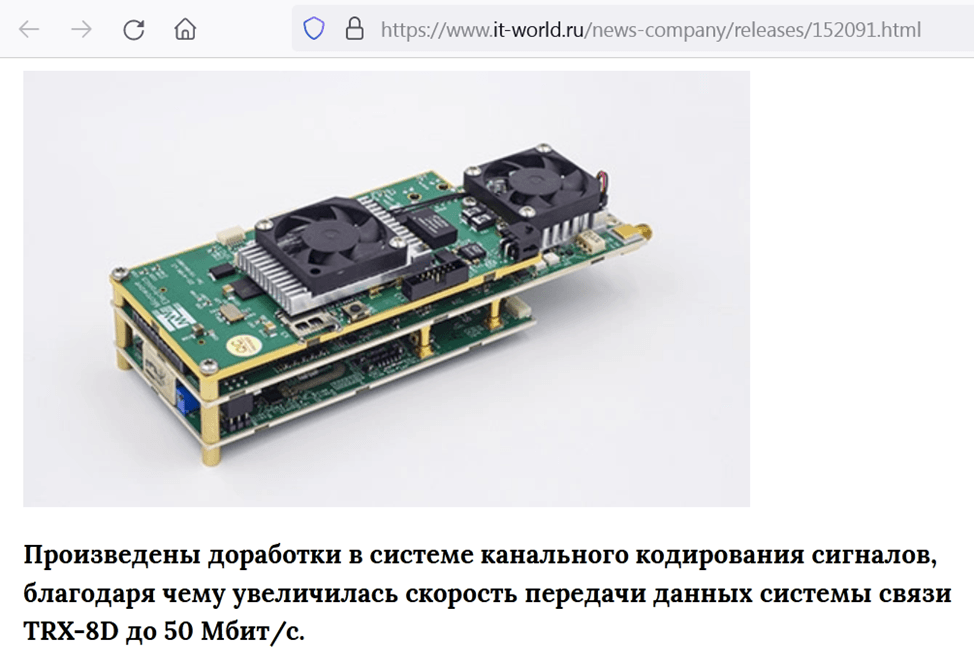
Рис. 10. Широкополосная система связи с диапазоном несущих частот от 30 МГц до 2,5 ГГц (литера 1) с полосой пропускания от 5 МГц до 80 МГц при мощности передатчика от 0,01 Вт до 5 Вт
С учётом литеров 1,2 и 3 эта система связи может иметь диапазон несущих частот от 30 МГц до 12 ГГц, что требует для противодействия наличия широкополосной помехи в этом диапазоне частот. По высоте здесь используется «трёхэтажная» конструкция из плат с вентиляторами и радиатором охлаждения. Вес устройства порядка 300 г и размеры 160 мм×60 мм×35 мм.
Одновременно известен радио-модуль БПЛА на малых дальностях в диапазоне частот от 3,4 ГГц до 3,6 ГГц в устройстве с управлением Е2Е4 KHUKRI STEALTH по рисунку 11.

Рис. 11. Используемый радио-модуль для передачи информации в БПЛА малой дальности
Это устройство также требует радиатор охлаждения, и его габариты 140×80×40 мм также превосходят габариты предлагаемого радио-модуля, как это будет видно в дальнейшем. Мало того, приведённые аналоги для использования в БПЛА не могут применяться в целях связи для гражданского использования, и при этом рассмотрены без антенн. Отсюда полагаем, что при учёте возможности многофункционального применения конструктивное решение предлагаемого радио-модуля должно соответствовать размерам смартфонов с габаритами порядка 150 мм × 75 мм × 9 мм. Известно, что для нового стандарта мобильной связи 5G для смартфонов европейские регуляторы определили полосу 3,4–3,8 ГГц. При этом, самая популярная частота, используемая современной аппаратурой радиоуправления – это 2,4 ГГц. Более низкие частоты доступны в метровом диапазоне, например, 27 МГц, 72 МГц, 433 МГц, 900 МГц или даже 1,3 ГГц, но они редко используются для квадрокоптеров. Таким образом, несущие частоты для смартфонов лежат в пределах от 2 ГГц до 4 ГГц. Кроме того, госкомиссия по радиочастотам (ГКРЧ) приняла решение о распределении частот 5030-5091 МГц для управления беспилотниками. Отсюда также следует вывод, что для обеспечения максимальной площади антенны с высоким КНД при наличии размеров радио-модуля по длине и ширине 150 мм × 75 мм наиболее оптимальным является вариант использования патч-антенн полоскового типа по рисунку 12.
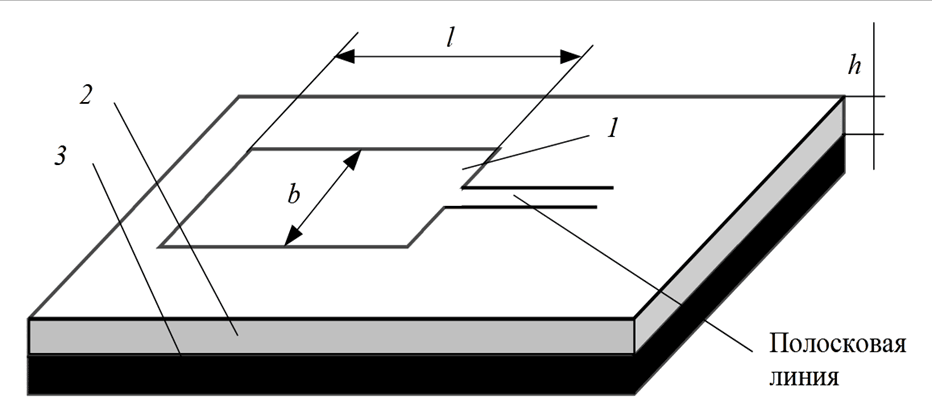
Рис. 12. Патч с линейной поляризацией
Здесь введены следующие обозначения: 1 – ленточный проводник; 2 – диэлектрический слой высотой h; 3 – проводящая подложка; l=b=λ/2 – половина излучаемой длины волны в диэлектрике.
Данной патч-антенне соответствует диаграмма направленности, представленная на рисунке 13.
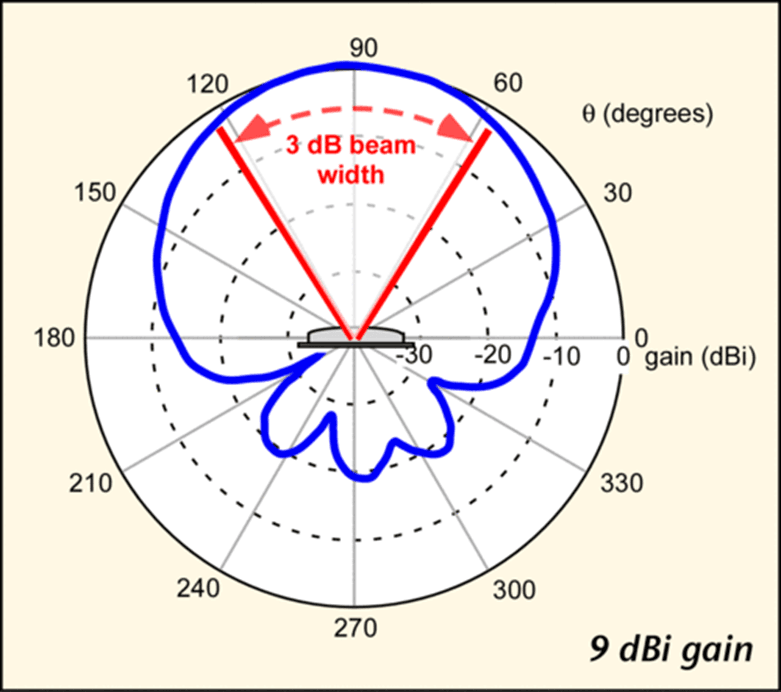
Рис. 13. Диаграмма направленности одного патч
Учитывая прямоугольные размеры как радио-модулей БПЛА, так и смартфонов при компактном объединении радиоустройства с антенной с получением лучших параметров по коэффициенту усиления, наиболее оптимальным будет вариант антенны из двух патч. Кроме того, при прямоугольной форме предлагаемого оптимального радио-модуля, желательно размещение двух патч непосредственно на плоскости устройства, что исключает необходимость дополнительных СВЧ кабелей с местами подсоединения к патч, как это показано на рисунке 14.
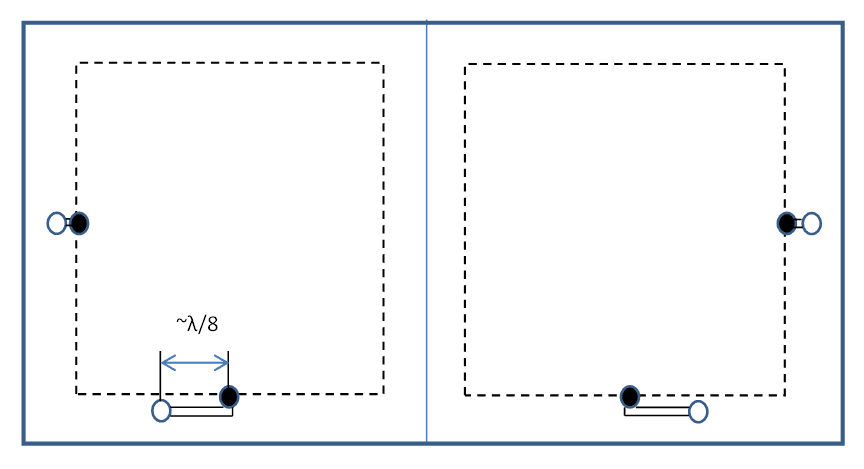
Рис. 14. Размещение патч с учётом соединений металлической поверхности полосковой антенны (контур обозначен штриховой линией) с подводкой через шлейфы от разъёма СВЧ типа защёлки с другой стороны многослойной печатной платы (место расположения разъёмов обозначено кружками без заливки черным цветом)
Отсюда, например, по сравнению с антенной мобильного устройства для системы космической связи типа Iridium (-3 дБ) предлагаемый вариант уже имеем выигрыш в коэффициенте направленного действия на 12 дБ (3 дБ+9 дБ), что видно по КНД для одной патч из рисунка 13. Повторим, что для аналогов, представленных на рисунках 10 и 11 антенны вообще не представлены и видимо являются отдельными устройствами, что исключает их применение в качестве мобильных устройств широкого применения.
В то же время, для обеспечения многофункциональности, а также обеспечения помехозащищённости в патч антенне желательно использовать вертикальную, горизонтальную поляризацию, а также круговую поляризацию, как левую, так и правую, что собственно и реализуется за счёт применения квадратного патч с подводом сигнала с двух перпендикулярных сторон. При этом подвод сигнала по горизонтали к двум патч осуществляется с противоположных сторон, а по вертикали с одной стороны как показано на рисунке 14. Это связано с тем, что использование 4-х мест подвода сигналов к двум патч определяет и использование 4-х приёмных малошумящих усилителей (МШУ) и 4-х усилителей мощности (УМ) и данное соединение с патч обеспечивает симметрию размещения усилителей как показано на рисунке 15 с минимальным расстоянием от мест подсоединения к патч, что обеспечит минимальные потери.
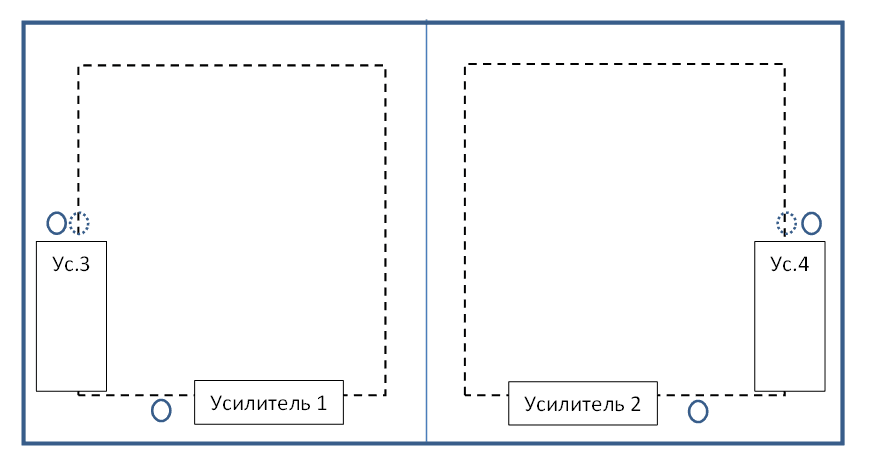
Рис. 15. Размещение входных МШУ и УМ на платах предлагаемого мобильного устройства с подключением к патч
Одновременно, так как предполагается использовать в качестве патч-антенны многослойную печатную плату, то в этом случае есть возможность обеспечить перед подводкой сигнала к патч наличие согласующих полосковых фильтров, на соответствующем слое многослойной печатной платы с патч-антенной, как это показано на рисунке 16.
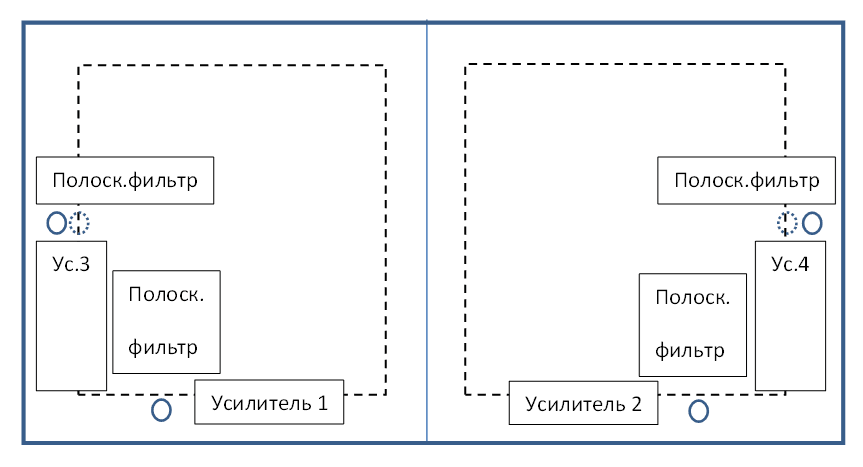
Рис. 16. Предполагаемое размещение полосковых фильтров на многослойной печатной плате патч-антенны
Однако на рисунке 16 мы показали расположение на плате либо входных МШУ, либо усилителей мощности (УМ). Сделать конструктивное параллельное расположение как МШУ, так и УМ возможно на обратной стороне многослойной печатной платы, однако при этом нагрев УМ через плату будет влиять на чувствительность МШУ. Поэтому конструктивное расположение МШУ и УМ желательно делать подальше друг от друга, чтобы нагрев УМ не влиял на МШУ, но так как подсоединения к патч УМ и МШУ одно и то же, то это требует увеличение расстояния от места подключения патч с наличием соответствующих потерь. Поэтому предлагается новое конструктивное решение, когда МШУ и УМ располагаются на разных платах с обеспечением между ними некоторого воздушного зазора (по аналогии расположения плат через стойки (их роль играют винты с гайкой) на рисунках 10 и 11). При этом подсоединение СВЧ входа-выхода осуществляется через СВЧ-разъём типа защёлка МВХ, например, по рисунку 17 с минимальным расстоянием между платами 6,7 мм при хорошем варианте совпадения осей соединений.

Рис. 17. СВЧ разъём типа «защёлка» с бочонком и с размерами при наличии при максимально плохом совпадении осей соединений, что и даёт расстояние между платами в 8,3 мм
Отсюда мы имеем расположение двух плат одна над другой с соединением их между собой на основе 4-х СВЧ разъёмов типа «защёлка» и остальные соединения между платами могут осуществляться короткими гибкими СВЧ проводниками, которые припаиваются одним концом к нижней стороне многослойной печатной платы патч-антенны, а другой конец через отверстие во второй многослойной печатной плате припаивается также к контактным площадкам со стороны противоположной к расположению патч-антенны. При использовании только гибких СВЧ соединений мы можем сократить воздушный зазор между многослойными платами вплоть до высоты максимального размера применяемых радиоэлементов. В предлагаемой конструкции это трансформатор ЕТС1-1-13, который имеет высоту в 3 мм и ключ питания HSSR-7110 с высотой 3,8 мм. Отсюда мы имеем двухэтажную конструкцию многослойных печатных плат, которая показана на рисунке 18.
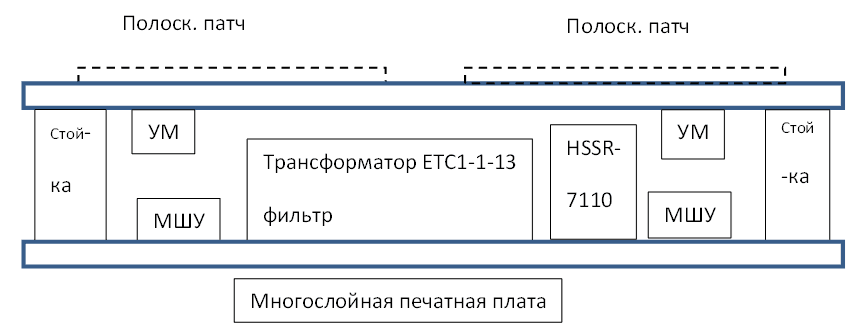
Рис. 18. Вид предлагаемой конструкции радио-модуля сбоку
Надо отметить, что толщина многослойной печатной платы в 6 слоёв может иметь размеры от 0,7874 мм до 3,175 мм. Стандартная толщина объединения для многослойных печатных плат составляет 1,55 мм.
Для определения размера зазора между металлической пластиной патч с металлической поверхностью соответствующей «земле» надо учесть, что ограничение сигналов по спектру поступающих на антенны определяется полосой пропускания антенны. Как известно патч-антенна простейшей конструкции узкополосная (<5%) [5], но специальные технические решения позволяют расширить рабочую полосу частот до 50% и более или строить многодиапазонные антенны. Ширина полосы пропускания патч-антенны сильно зависит от расстояния между лепестком и металлической поверхностью играющей роль «земли». Чем ближе лепесток к «земле», тем меньше энергии излучается и больше запасается в ёмкости и индуктивности и тем выше добротность антенны. Грубо полосу пропускания антенны можно оценить по формуле:
 (1)
(1)
где d – расстояние от лепестка до земли, W – ширина лепестка (обычно половина длины волны), Z0 – импеданс воздушного промежутка между лепестком и землёй, Rrad – сопротивление излучения антенны, Относительная полоса пропускания антенны линейно зависит от её толщины. Характерное значение импеданса воздушного промежутка 377 Ом, а сопротивление излучения 150 Ом, что позволяет упростить формулу:
 (2)
(2)
Исходя из наиболее применяемой частоты для квадрокоптеров в районе 2,4 ГГц мы будем иметь квадратный лепесток со стороной квадрата W=6,25 см.
Далее мы исходим из того, что полоса пропускания антенны может фактически выполнять функцию ограничения принимаемых сигналов, как это делают на входе приёмника известные используемые фильтры ширпотреба на несущей частоте. Собственно это позволяет не использовать фильтр с такой полосой пропускания на входе, и удаление нежелательных радиосигналов будет выполняться автоматически без потерь на затухание в фильтре. Так, например, фильтр BFCN-2360+ с полосой 2250-2470 МГц даёт затухание входного сигнала в 2 дБ. При этом полоса пропускания фильтра составляет 220 МГц. Это означает необходимость ширины полосы пропускания антенны 9,167 %. В этом случае воздушный зазор между металлическим элементом патч и «землёй» составит толщину антенны в d=0,477 см. Понятно, что зазор по толщине можно уменьшить с переходом на более высокие несущие частоты или с использованием диэлектрического наполнителя. Однако, если исходить из требований госкомиссии по радиочастотам (ГКРЧ), то из таблицы 1 видно, что допустимая разрешённая полоса составляет 40 МГц, а для управления беспилотниками ГКРЧ приняла решение о распределении частот 5030-5091 МГц, что даёт полосу в 61 МГц. Отсюда, при полосе пропускания антенны на патч в 50 МГц, мы будем иметь при несущей частоте в 2400 МГц воздушный зазор между металлической пластиной патч и металлической пластиной, выполняющей функцию «земля» d=1,04 мм. Надо отметить, что отказываться от входного фильтра в предлагаемой конструкции не стоит, так как его можно выполнить на отрезках полосковых линий при использовании многослойной печатной платы для патч-антенны. Использование полосковых линий позволит также улучшить характеристики по согласованию с входными малошумящими усилителями (МШУ) для минимизации коэффициента стоячих волн (КСВ). Следовательно, при полосе пропускания в 50 МГц на несущей частоте в 2400 МГц мы имеем минимальную общую толщину предлагаемой конструкции 1,04 мм (воздушный зазор в патч)+ 2×1,55 мм (толщина платы)+3,8 мм (высота ключа питания)=7,95 мм. Отсюда общие габаритные размеры предлагаемой конструкции 140 мм×70 мм×7,95 мм. Учитывая зазор в 3,8 мм, то в целях улучшения теплоотдачи между платами с радио элементами можно использовать два радиатора: один на верхнюю плату для улучшения теплоотдачи от УМ, а второй – на нижнюю плату с обеспечением лучшей теплоотдачи от АЦП, ПЛИС и ЦАП. Понятно, что в радиаторах предусматриваются вырезы или выемки для ЕТС1-1-13 и HSSR-7110, а также и других радиоэлементов, которые по высоте превосходят радиоэлементы с теплоотдачей. Для лучшего соприкосновения радиаторов с поверхностью элементов с высоким нагревом между радиаторами устанавливаются пружинящая металлическая пластина. Стойки, обеспечивающие расстояние между многослойными печатными платами можно выполнить в виде винта с конусообразной шляпкой с полным её вхождением в многослойную печатную плату. Гайка также может быть впрессована в многослойную печатную плату. Как мы отмечали ранее, размеры смартфона Samsung Galaxy A51 имеют в длину 158.5 мм, в ширину 73.6 мм и толщину 7,9 мм. Это означает, что у нас по длине и ширине ещё есть место на платах для размещения радиоэлементов связи через Wi-Fi, или иным способом, с другими устройствами. При этом нет необходимости подносить наше предлагаемое устройство к уху при разговоре, достаточно использовать его для приёма и передачи сигнала через отдельный аксессуар в виде беспроводных наушников и микрофона, например при космической связи, так как мощность в 4 Вт даже в импульсе может привести к раковым опухолям мозга. Отметим, в космической системе связи Iridium в его мобильном устройстве используется мощность в импульсе в 7 Вт. Собственно уже сейчас большинство пользователей используют аксессуар в виде беспроводных наушников и микрофона, так как это исключает влияние внешнего шума.
Так как в [1, 2] мы установили, что оптимальный поток информации должен быть порядка 38 - 50 Мбит/сек, то минимальная чувствительность приёмника при полосе Fпрм=50 МГц, коэффициенте шума Nш=5 дБ (3,16), температуре Т=600оК, вероятности ошибки на уровне 10-7 при q=27, вычисляется по формуле:

 (3)
(3)
Однако этот результат связан с наличием конструктивного решения с одним входным МШУ. В нашем случае при использовании круговой поляризации и двух патч мы имеем 4 входных МШУ. С учётом того, что приходящий сигнал даёт когерентное сложение и усиление в 4 раза (N раз), а шумы дают сложение в 2 раза (N1/2 раз), то мы имеем повышение чувствительности в 2 раза (3 дБ) за счёт конструктивного решения (минус 77,5 дБм). Практически это сравнимо с чувствительностью для сигнала QAM 16 ¾ (минус 77 дБм) при потоке информации 13,5 Мбит/сек по рисунку 11, но у нас поток информации 38 Мбит/сек. Если сделать пересчёт на тот же поток информации, то у нас есть выигрыш по чувствительности на 5 дБ. Это означает, что использование режима QAM значительно ухудшает чувствительность по сравнению с режимом BPSK, хотя и позволяет сузить полосу пропускания. Однако для обычного сигнала QPSK по рисунку 11 мы теряем преимущество нашего сигнала BPSK по чувствительности при той же скорости передачи. Так по рисунку 11 для QPSK мы имеем чувствительность в минус 88 дБм при скорости передачи 4,5 Мбит/сек, у нас такая же скорость передачи по формуле (2) даёт чувствительность минус 87,96 дБм. Иными словами получается, что обычный режим QPSK по рисунку 11 относительно нашего варианта даёт преимущество по сравнению с режимом BPSK, если исходить из сравнения по одинаковому потоку информации и при этом имеет более узкую полосу пропускания. Понятно, что элементарная логика говорит о том, что использование обычного режима QPSK позволяет сузить полосу пропускания по сравнению с режимом BPSK в 2 раза, но при этом и чувствительность ухудшиться в 2 раза, а это означает, что измерения чувствительности по рисунку 11 проводились при других значениях вероятности ошибки, коэффициенте шума и температуре. Это видно по формуле (2) для анализа чувствительности при сигнале ШПС по рисунку 11, которая при потоке информации в 0,55 Мбит/сек составляет минус 105 дБм, в то время как по формуле (2) она может быть не более минус 94,1 дБм.
Дальнейшую оптимизацию конструктивного решения мы будем проводить с упором на реально достижимые характеристики элементной базы в силу того, что есть ограничения по полосе пропускания, потерям, усилению, чувствительности, мощности и т.д. Так для когерентного суммирования сигналов от МШУ в диапазоне 2,4 ГГц в качестве МШУ может использоваться MAAL-007304 с полосой от 0,5 до 3 ГГц, коэффициентом шума в 0,7 дБ и усилением в 24 дБ на частоте в 2,4 ГГц. При этом для двух МШУ подключаемых с противоположных сторон к каждой из двух соответствующих патч, мы должны обеспечить когерентное сложение за счёт использования сигналов в противофазе от трансформатора ETC1-1-13 (диапазон от 4,5 МГц до 3 ГГц и трансформатор даёт потери в диапазоне 2-3 ГГц в 3,5 дБ). Для двух МШУ расположенных с одной стороны двух патч мы используем сумматор DS52-0007 (он имеет диапазон от 2,2 ГГц до 2,5 ГГц и затухание в 1,1 дБ). Для обеспечения как правой, так и левой поляризации можно использовать фазовращатель на основе трансформатора ETC1-1-13 для изменения фазы на 180 градусов. С этой целью для переключения фазы используются ключи SKY13290-313LF с потерями на частотах 2 - 2,5 ГГц до 0,7 дБ. Далее для общего суммирования с сигналами двух других МШУ с подключением от двух противоположных сторон двух патч тоже используется сумматор DS52-0007. В итоге после первых МШУ мы имеем, после общего суммирования, потери в мощности сигнала на 2×1,1 дБ +3,5 дБ + 0,7 дБ = 6,4 дБ не считая потерь связанных с прохождением сигнала в полосковых линиях платы с учётом согласования. Фактически суммирование сигналов от 4-х МШУ с преимуществом сложения в 6 дБ (4 раза) теряется за счёт потерь связанных с наличием многофункционального использования для обеспечения вертикальной, горизонтальной и круговой поляризации, но влияние шумов из-за когерентного сложения после усиления в первых МШУ падает в 2 раза. Однако это без учёта того, что мы имеем преимущество в коэффициенте усиления антенны в 9 дБ из двух патч за счёт площади поверхности самих антенн и возможностью обеспечить повышение помехозащищённости за счёт смены поляризации. Потери также могут быть снижены, если использовать радиоэлементы только используемого диапазона частот, что является задачей для изготовления в промышленности. Так как не имеет смысла в дальнейшем усиливать вместе с сигналом шумы вне полосы пропускания антенны, то необходимо ограничить влияние шумов и нежелательных сигналов помех вне полосы пропускания сигнала приходящей информации (собственно эта полоса уже имеет ограничение за счёт использования сумматоров DS52-0007 при диапазоне 2,2 ГГц-2,5 ГГц). В этом случае после суммирования сигналов от четырёх первичных МШУ можно дополнительно использовать фильтр (возможно более узкополосный, чем сумматор DS52-0007 для исключения влияния помех, например, по зеркальному каналу), что также даёт потери. В итоге, при использовании, например, фильтра BFCN-2360+ (диапазон 2250-2470 МГц) мы имеем общие потери с фильтром в приёмном тракте до 8,4 дБ. Поэтому желательно суммарный радиосигнал, для компенсации потерь, усилить ещё одним МШУ. Соответственно, после этого, осуществляется перенос радиосигнала по частоте за счёт смесителя. При этом выбор смесителя существенно зависит от мощности гетеродинного сигнала. Так, например, известен смеситель несущих частот вниз μPC2758TB с работой в полосе возможных частот от 0,1 ГГц до 2 ГГц, что конечно нас бы не устраивало, если бы не были указаны его характеристики вплоть до 2,5 ГГц. При этом изменения по параметрам незначительны и связаны с уменьшением коэффициента преобразования частоты. Так при частоте входного сигнала в 2,2 ГГц (частота входного сигнала превосходит частоту гетеродина), мощности гетеродинного сигнала в минус 15 дБм (рекомендованное значение от минус 15 дБм до 0 дБм) коэффициент преобразования будет порядка 10 дБ. С учётом ограничения из-за сумматора DS52-0007 при нижней его границе пропускания в 2200 МГц, мы будем иметь минимально возможную частоту входного принимаемого сигнала в 2200 МГц, а максимальная частота гетеродина при промежуточной частоте в 228-300 МГц (это вариант формирования второго гетеродинного сигнала от тактовой частоты ПЛИС) будет в пределах 1900 МГц-1972 МГц. Если исходить из того, что второй гетеродинный сигнал будет формироваться от деления сигнала первой гетеродинной частоты (деление на 8, с учётом того, что вначале выполняется деление на 4, а потом на два как это сделано в первом экспериментальном образце предлагаемого устройства с получением второго гетеродинного сигнала в квадратуре), то в этом случае промежуточная частота вычисляется по формуле: Fгет=8×Fспрм/9=2,2 ГГц×8/9=1,955555 ГГц. Это даёт промежуточную частоту порядка 244-245 МГц. В этом случае для формирования первой гетеродинной частоты с наличием смещения по частоте Доплера можно использовать квадратурный модулятор типа AD8346 с диапазоном частот от 0,8 до 2,5 ГГц с полосой модулирующего сигнала от 0 до 70 МГц при питании от 2,7 В до 5,5 В с током потребления в 45 млА и выходной мощностью гетеродинного сигнала до минус 12 дБм. С другой стороны возможно использовать смеситель несущих частот вниз IAM-91563 от 0,8 до 6 ГГц при уровне мощности гетеродинного сигнала в минус 5 дБм, однако в этом случае надо использовать квадратурный модулятор типа AD8349 с диапазоном частот от 0,8 до 2,7 ГГц с полосой модулирующего сигнала от 0 до 200 МГц при питании от 4,5 В до 5,5 В с током потребления в 107 млА и выходной мощностью до 2 дБм. То есть выигрыш по диапазону частот за счёт смесителя IAM-91563 и выигрыш в мощности гетеродинного сигнала за счёт модулятора AD8349 приводит к увеличению энергетических потерь в 2 раза. Кроме того, при выборе смесителя с квадратурным модулятором надо учитывать, что сигнал с выхода квадратурного модулятора используется не только для формирования гетеродинной частоты, а также служит сигналом для передачи информации при работе радио-модуля в режиме передатчика. И в этом случае стоит вопрос об оптимизации потерь при приёме и передаче, так как вариант c AD8346 требует дополнительного каскада усиления на 12 дБ в режиме передачи, и соответственно потери будут определяться временем работы при приёме и передаче. В нашем случае был выбран вариант со смесителем μPC2758TB. После смесителя μPC2758TB при переносе сигнала в область 300 МГц, для компенсации потерь, применяется усилитель μPC2746TB с коэффициентом усиления 19 дБ в диапазоне до 1,5 ГГц при токе потребления 7 млА и питании от 2,7 до 3,3 В. На выходе усилителя μPC2746TB можно использовать фильтр, например, на промежуточной частоте в 228 МГц - 300 МГц при полосе частот необходимой для пропускания сигнала информации в 38 Мбит/сек, что составляет порядка 50 - 60 МГц. Однако такой фильтр делают на заказ, поэтому используем известный фильтр RBP-253+, он имеет диапазон частот от 186 до 340 МГц с полосой пропускания в 154 МГц (в 2,5 раза выше) при потерях в полосе пропускания не более 2 дБ. Дальнейшее усиление входного сигнала информации осуществляется за счёт логарифмического операционного усилителя с коэффициентом усиления под 100 дБ. В качестве логарифмического усилителя можно использовать AD8309, который имеет динамический диапазон от минус78 дБм до 22 дБм при дифференциальном выходе с размахом ±1,2 В и полосой пропускания в 500 МГц, здесь напряжение питания от 2,7 до 6,5 В при токе потребления 16 млА. Логарифмическое усиление исключает исчезновение входного сигнала при наличии мощного мешающего сигнала. После логарифмического усиления для обеспечения цифровой обработки сигнала осуществляется переход от радиосигнала к видеосигналу за счёт демодуляции через смесители AD831 с получением составляющих сигнала в квадратуре по синусу и косинусу. Как мы показали ранее в [1-3] перенос на нулевую промежуточную частоту позволяет проводить дискретизацию входного сигнала информации при меньшей тактовой частоте. Как мы отметили выше, переход к квадратурному сигналу на нулевой промежуточной частоте может осуществляться за счёт смесителей AD831 (полоса пропускания на выходе 250 МГц, необходимая мощность сигнала гетеродина -10 дБм с питанием в ±5 В с максимальной амплитудой сигнала на входе ±1 В) на выходе которых для согласования с аналого-цифровыми преобразователями типа AD9254 желательно использовать дифференциальные усилители AD8131. Выбор АЦП AD9254 определяется тактовой частотой дискретизации. Исходя из необходимости наличия 3 тактовых импульсов на символ информации, с учётом теоремы Котельникова и исключением ошибок от дискретизации, что было нами показано в [1], мы имеем необходимую тактовую частоту дискретизации для АЦП, при скорости передачи информации в 38-50 Мбит/сек, в 114 -150 МГц. Это соответствует оптимальным радиотехническим параметрам по [1-4]. В этом случае, при превышении сигнала над шумом, допустима ошибка от одного такта дискретизации в виде неправильной информации из общего числа в три такта на символ. Чтобы обеспечить улучшение достоверности информации необходимо повышать количество тактов на символ. Однако в этом случае тактовая частота дискретизации на АЦП должна быть повышена и при этом растут энергетические потери как в АЦП, так и в ПЛИС и требуется большее количество логических элементов с усложнением подбора задержек между ними. Поэтому в предлагаемом конструктивном решении, если сигнал имеет некоторое превышение над шумами, то параллельно АЦП к выходу дифференциального усилителя (AD8131) подключается компаратор, с выхода которого сигнал в бинарном виде поступает на соответствующий вход ПЛИС. Это позволяет проводить квантование входного сигнала в ПЛИС с тактовой частотой уже в 228 - 300 МГц, которая формируется в ПЛИС А3РЕ3000L (здесь возможна тактовая частота до 350 МГц при изготовлении ПЛИС по технологии в 130 нм). Из тактовой частоты в 228-300 МГц получается в ПЛИС тактовая частота в 114-150 МГц для АЦП простым делением на 2. Частота бинарного квантования в 228 - 300 МГц допускает наличие ошибочных двух тактов из шести на символ информации. Это значительно улучшает отношение сигнал/шум. Кроме того, желательно, чтобы сигнал гетеродина, поступающий на смесители AD831, имел фиксированное значение вне зависимости от сигнала гетеродина поступающего на смеситель с формированием первой промежуточной частоты (он формируется за счёт синтезатора частоты ADF4350 с диапазоном работы 137,5 - 4400 МГц). Это позволяет сужать полосу пропускания до значения необходимого только для фильтрации входного сигнала в пределах 50-60 МГц. Поэтому тактовая частота от ПЛИС в 228 -300 МГц может быть использована и для формирования второго гетеродинного сигнала промежуточной частоты. С этой целью, данная тактовая частота, через усилитель MAALSS0012 (выходная мощность 18 дБм) поступает на умножитель частоты на 2, например, К1324ПП2 (диапазон входных рабочих частот от 0,3 до 1,9 ГГц, рассеиваемая мощность 100 мВт, входная мощность 16 дБм), а далее с помощью трансформатора ETC1-1-13 формируются противофазные сигналы (дифференциальный выход). Противофазные сигналы через соответствующие делители частоты на 2 (может применяться HMC432 с входным сигналом в минус 15 дБм, выходной мощностью от минус 6 дБм до минус 3 дБм при питании 3 В и потреблении в 42 млА) формируют гетеродинные сигналы на AD831 по синусу и косинусу. Надо отметить, что идея выделения сигнала информации при тактовой частоте в 228 МГц через компаратор при «вшитой» соответствующей математической программе в ПЛИС была проверена экспериментально в АНО «НТИЦ «Техком». Разрядность АЦП AD9254 в 14 бит исключает «обрезание» входного сигнала за счёт высокой амплитуды шумового сигнала и позволяет обеспечить превышение сигнала над шумами за счёт длительного накопления по коду. Как будет показано несколько ниже, высокая разрядность обеспечивает при накоплении лучшее определение разницы амплитуд при наведении на источник излучения с помощью антенны и разрядность в 14 бит необходима для сплайнов с повышением точности определения смещения по частоте Доплера. Соответственно цифровые сигналы с АЦП поступают на ПЛИС (А3РЕ3000L) где осуществляется конечная обработка с выдачей приходящей информации. Таким образом, отличие предлагаемого конструктивного решения при приёме сигнала, касаются следующих технических методов:
- Используются в устройстве антенны два патч, которые обеспечивают повышение коэффициента усиления антенны в направлении на принимаемый сигнал как минимум в 10 раз по сравнению с антенной мобильного устройства связи Iridium (-3дБ). Здесь учитывается, что при первичном входе в связь можно использовать режим с накоплением сигнала. Исходя из рисунка 13 видно, что при приёме сигнала по углам от 0 до 180 градусов требуется накопление для повышения отношения сигнал/шум на 20 дБ, что вполне реализуемо даже при коде в 1000 бит с выделением сигнала 3,8 кбит/сек после цифровой фильтрации (отношение сигнал/шум исходя из начальной полосы пропускания 38 МГц и конечной в 3,8 кбит/сек будет 10000 раз) как это предлагается в [4]. Надо отметить, что такая скорость передачи информации в 3,8 кбит/сек используется в разговорах в телефонном режиме (ТЛФ). Иными словами даже не потребуется менять положение антенны предлагаемого устройства в направлении на передатчик, а использование только одного патч достигается либо отключением питания МШУ одного из патч, либо шунтированием входного тракта через ключ. Одновременно в этот момент можно получить и информацию о местоположении принимаемого сигнала по навигационным данным.
- Возможность получения сигнала вертикальной, горизонтальной и круговой поляризации определяет места подключения к двум патч 4-х первоначальных МШУ, а также УМ. Соответственно места расположения МШУ и УМ выбираются наиболее близко к местам соединения с патч для исключения дополнительных потерь. Наличие 4-х МШУ, с учётом когерентного сигнала, даёт преимущество в улучшении отношения сигнал/шум в 2 раза за счёт когерентности приходящих сигналов.
- Для исключения влияния нагрева УМ на МШУ, УМ располагаются в нижней части многослойной печатной платы с патч-антенной, а МШУ располагаются в верхней части второй платы подсоединяемой к плате с патч-антенной через зазор в 3,8 мм на высоту HSSR-7110, выше которого нет других радиоэлементов. При этом в промежутке между платами размещаются радиаторы для отвода тепла от элементов с высоким нагревом.
- Использование патч на основе применения многослойных печатных плат позволяет использовать на полосковых элементах высокое согласование и подбор параметров по фильтрации.
- Помимо квантования входного сигнала в АЦП с последующей обработкой, при превышении сигнала над шумами используется непосредственное подключение входного сигнала через компаратор к ПЛИС с получением бинарного квантования и тактом дискретизации в 228 – 300 МГц, что также позволяет уменьшить вероятность ошибки за счёт допущения двух неправильных тактов из шести.
- Сигнал тактовой частоты в 228 – 300 МГц от ПЛИС может также использоваться для формирования второй гетеродинной частоты и исключает взаимную зависимость двух гетеродинных сигналов, когда вторая гетеродинная частота формируется за счёт деления первой гетеродинной частоты. Это обеспечивает однозначное согласование по дифференциальному выходу синтезатора частот ADF4350 с дифференциальным входом AD8346 или AD8349 без трансформатора ЕТС1-1-13. При этом обеспечивается возможность перестройки несущей частоты сигнала во всей области диапазона в полосе 300 МГц, которая ограничивается в данном случае сумматором DS52-0007 из-за диапазона от 2,2 ГГц до 2,5 ГГц.
- Возможно многофункциональное использование как в качестве радиоуправления для БПЛА, так и в качестве мобильного устройства связи. АЦП с высокой разрядностью квантования позволяет обеспечивать высокое разрешение по амплитуде, что может использоваться при наведении максимума антенны на направление сигнала от командного пункта и для повышения точности определения параметров путём использования сплайнов, как это будет показано ниже.
Режим передачи определяется подачей сигнала информации на балансный модулятор AD8346 от ПЛИС через цифро-аналоговый преобразователь (ЦАП), а сигнал несущей частоты поступает на AD8346 от синтезатора частот типа ADF4350. Учитывая скорость передачи информации в 38-50 Мбит/сек был выбран ЦАП AD9763, он имеет хорошее согласование с балансным модулятором AD8346. Соответственно, если исходить из необходимости выходной мощности для БПЛА в 4 Вт по требованиям представленным в [2, 3], а также исходя из полосы частот в 2,2 - 2,5 ГГц из-за ограничения диапазона частот сумматором DS52-0007, то УМ типа SZA-2044 может выдать мощность в 1 Вт. Соответственно 4 таких усилителя мощности, подсоединённые к патч дадут необходимую мощность в 4 Вт, причём в полосе 2 - 2,7 ГГц. Усиление SZA-2044 на частоте 2,4 ГГц составляет 25,5 дБ. С выхода балансного модулятора AD8346 мы имеем минус 12 дБм, кроме того есть потери в 6 дБ на разветвление сигнала на 4 УМ и потери в 6,4 дБ связанные с изменением фазы на 180 градусов при смене поляризации, аналогично варианту с приёмом сигнала. В итоге на вход усилителя мощности SZA-2044 будет поступать сигнал в минус 24,4 дБм, что обеспечивает на выходе УМ уровень сигнала в 1,1 дБм, что не обеспечит необходимой мощности. Отсюда следует усилить передаваемый сигнал информации за счёт предусилителя как минимум на 25 дБ. С этой целью мы выбираем усилитель MAALSS0013, который имеет в диапазоне от 2 до 2,5 ГГц усиление порядка 17 дБ и далее используется усилитель MAALSS0012 с полосой от 0,2 до 3 ГГц и усилением в 10 дБ с выходной мощностью в 18 дБм. Понятно, что потребность в двух усилителях связано только с отсутствием аналога позволяющего обеспечить усиление в 27 - 30 дБ в данном диапазоне частот. Исходя из максимума на выходе MAALSS0012 в 18 дБм, с учётом потерь в 6,4 дБ связанных с инверсией фазы на 180 градусов и делением сигнала на 4 мы будем иметь на входах SZA-2044 сигнал 5,6 дБм. В этом случае при усилении сигнала в УМ SZA-2044 на 25,5 дБ выходная мощность достигнет необходимой величины в 30 дБм.
Таким образом, мы показали, что предлагаемое устройство в указанных габаритных размерах, с использованием радиоэлементов ширпотреба превосходит известные аналоги по рисункам 10 и 11, как по радиотехническим характеристикам, так и по габаритным размерам и весу, так как вписывается в размеры смартфонов. Дальнейшее совершенствование может происходить за счёт замены радиоэлементов на меньшие по размерам, с меньшим потреблением мощности и соответствия частотному диапазону патч-антенн. Габаритные размеры для мобильных телефонов (смартфонов) также имеют устоявшиеся значения (например, Samsung Galaxy A51 5G имеет размеры: 158,9 х 73,6 х 8,7 мм, вес: 187 г) и от меньших размеров отказались в пользу увеличения экрана дисплея, а также многофункциональности. Надо отметить, что можно предусмотреть соединение смартфона с предлагаемым устройством радио-модуля дающего возможность приёма через космическую связь и непосредственно между абонентами как единого целого, в виде откидного варианта радио-модуля от смартфона в виде открытой книги. В этом случае, так как общие габаритные размеры предлагаемой конструкции 140 мм×70 мм×7,95 мм, то изменится только толщина общего аппарата до 1,665 см. Конечно, это менее удобно, однако это даст возможность иметь связь в любой точке мира и использовать общую аккумуляторную батарейку на большее количество часов работы. При использовании предлагаемого радио-модуля в качестве средства радиоуправления БПЛА вопрос о питании решается за счёт источника питания установленного на самом БПЛА. Если предлагаемое устройство будет использоваться отдельно в качестве мобильной системы связи, то под нижней платой предлагаемого радио-модуля можно разместить два аккумуляторов FLY FS454 Nimbus 8 (BL6425) с размерами 74 мм × 47 мм × 4 мм и весе 50 г, с ёмкостью в 1700 мА·ч, напряжением 3,8 В, мощностью 6,46 Вт·ч , с последовательным включением для получения напряжения в 5 В через стабилизатор напряжения. Возможно также использование с таким же расположением и подключением аккумуляторов Lenovo A369 (BL203) с размерами 76 мм × 49 мм × 3,9 мм. При этом ёмкость в 1300 мА·ч, напряжение питания 3.7 В, но вес батарейки 31 г. Общая ёмкость от двух батареек составит 2600 мА·ч. Для сравнения, аккумуляторная батарейка мобильного устройства Iridium имеет 2200 мА·ч. Понятно, что в этом случае толщина предлагаемого устройства возрастёт до 11,35 мм, но возможны варианты создания специализированных аккумуляторных батареек под размеры предлагаемого устройства с минимизацией толщины. Надо отметить, что в перспективных современных смартфонах наметилась тенденция на применение аккумуляторных батареек толщиной всего 3 мм.
Соответственно рассмотрим теперь намечающуюся тенденцию перехода на частоты от 3 до 5,091 ГГц для которого, конечно, нужна своя база из радиоэлементов. Понятно, что в этом случае также можно использовать патч-антенны. Однако, так как размеры этих патч оказываются фактически вдвое меньше, чем показанные на рисунке 15, то желательно использовать конструктивное исполнение по принципу патч-антенны рассмотренной в [6] которая показана на рисунке 19, возможно без дополнительной металлической пластины сверху обеспечивающий расширение диапазона частот и убиранием питающих шлейфов на соответствующие слои многослойной печатной платы.
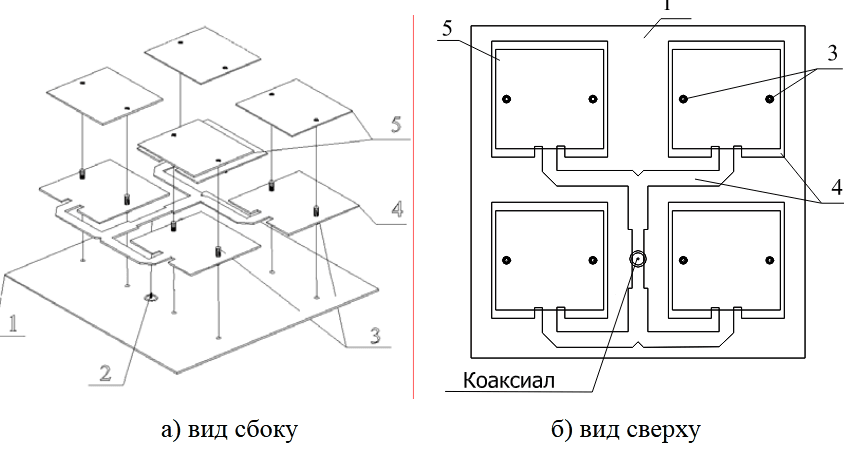
Рис. 19. 4-х элементная АФАР с воздушным заполнением
В соответствии с рисунком 19, на рисунке 20 приведена конкретная аналогичная реализация такой патч-антенны на основе многослойной печатной платы.
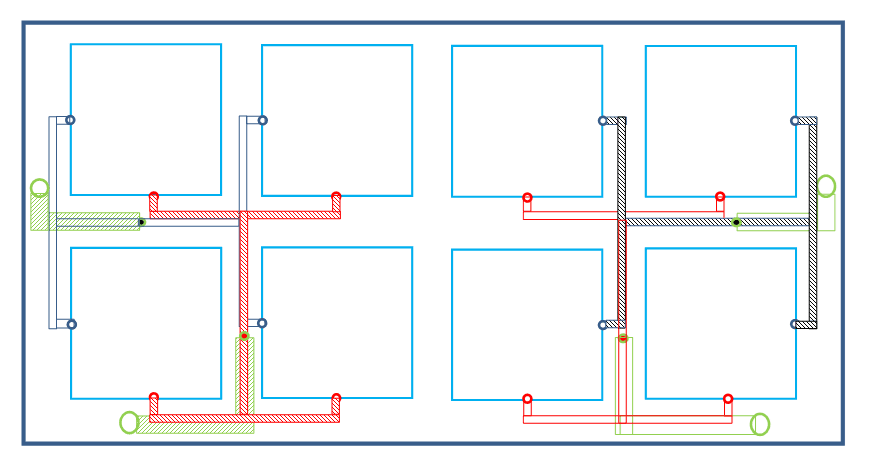
Рис. 20. Расположение патч для получения вертикальной, горизонтальной и круговой поляризации на несущих частотах порядка 3-5 ГГц
Здесь красным цветом отображён четвертьволновый полосковый делитель, дающий вертикальную поляризацию, и он расположен на своём слое многослойной печатной платы с подсоединением через металлизированное отверстие к верхнему слою металлической пластины патч с прохождением без контакта через металлизированный слой отображающий «землю». На рисунке 20 это отмечено металлизированным отверстием с контуром красного цвета. Далее через металлизированное отверстие (отмечено на рисунке 20 линией окружности контура зелёного цвета с красным заполнением) идёт соединение со слоем многослойной печатной платы, в котором может быть осуществлено согласование через полосковые линии и подобрана соответствующая длина в λ/4 между точками подсоединения к патч между вертикальной и горизонтальной поляризацией. Этот слой многослойной печатной платы обозначен зелёным цветом и через металлизированное отверстие зелёного цвета осуществляется подсоединение к противоположному последнему слою с подсоединением к МШУ и УМ, как это было сделано в случае варианта 2-х патч. Аналогично контуром линий чёрного цвета отображён четвертьволновый полосковый делитель, дающий горизонтальную поляризацию и он расположен на своём слое многослойной печатной платы с подсоединением через металлизированное отверстие к верхнему слою металлической пластины патч с прохождением без контакта через металлизированный слой отображающий «землю». На рисунке 20 это отмечено металлизированным отверстием с контуром черного цвета. Далее через металлизированное отверстие (отмечено на рисунке 20 линией окружности зелёного цвета с чёрным заполнением) идёт соединение со слоем многослойной печатной платы, в котором может быть осуществлено согласование через полосковые линии и подобрана соответствующая длина в λ/4 между точками подсоединения к патч между вертикальной и горизонтальной поляризацией. Этот слой многослойной печатной платы обозначен зелёным цветом и через металлизированное отверстие зелёного цвета осуществляется подсоединение к противоположному последнему слою с подсоединением к МШУ и УМ в нижней части платы, как это было сделано в случае варианта 2-х патч.
Как показано в [6] схема, состоящая из четырёх патч, может иметь коэффициент усиления в 14,5 дБ при КСВН<1,2. Диаграмма направленности такой антенны приведена на рисунке 21.
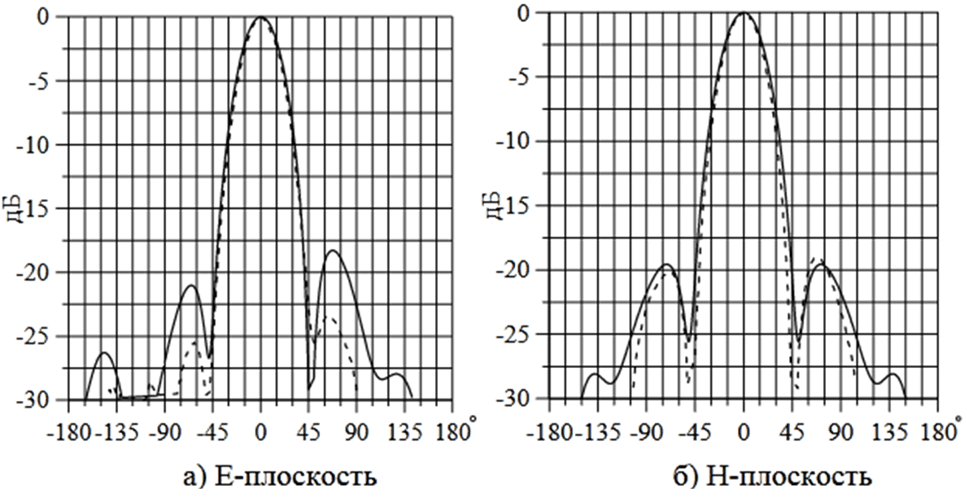
Рис. 21. Антенна из 4-х элементов патч, моделирование это сплошные линии, штриховые линии это экспериментальные с шириной диаграммы направленности в 34 градуса
В нашем случае по рисунку 20 при 8 патч мы будем иметь общий коэффициент усиления в 17,5 дБ. Использование антенны с высоким коэффициентом усиления в БПЛА обеспечивает повышенную помехозащищённость, так как максимум диаграммы направленности можно ориентировать в направлении на командный пункт управления (КПУ). Для того, чтобы обеспечить такую направленность антенны на КПУ, а это необходимо при высоком коэффициенте направленного действия (КНД), что неизбежно при переходе к несущим частотам в диапазоне 3 - 5,1 ГГц, нужно использовать механизм управления патч-антенной аналогичный показанному на рисунке 22.
Рис. 22. Пример способа управления антенной
Отметим, что при прямоугольных размерах патч-антенны у нас формируется основной луч антенны в форме эллипса, что показано на рисунке 23, и им можно с помощью механизма управления осуществлять угловое сканирование. За счёт этого формируется пеленгационная характеристика.
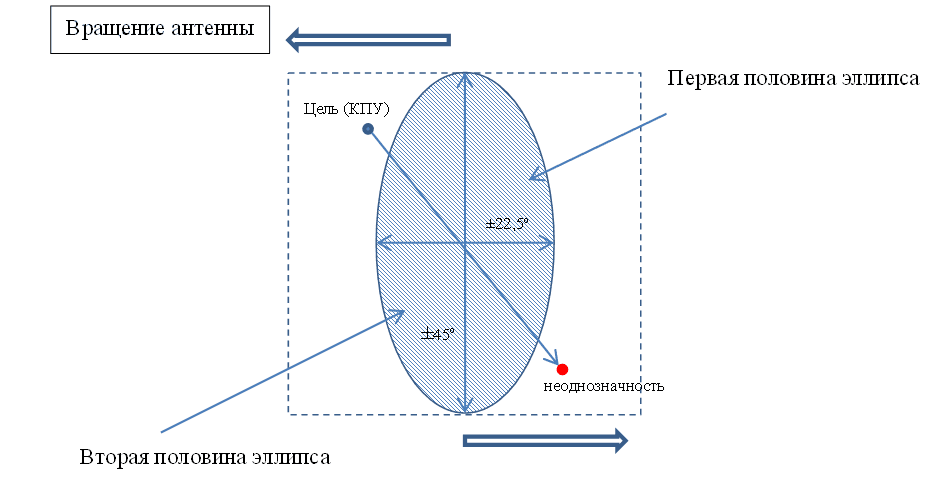
Рис. 23. Диаграмма направленности основного луча, состоящей из восьми патч для несущих частот от 3-5,1 ГГц
Однако пеленгационная характеристика будет иметь разный наклон по азимуту и углу места из-за эллипса образной формы основного луча, одновременно сектор захвата на сопровождение будет по уровню падения сигнала на 3 дБ и отличаться в 2 раза по азимуту и углу места, что ухудшает характеристики наведения. Из рисунка 23 видно, что добавление вращения патч-антенны в плоскости перпендикулярной направлению к нормали самой антенны даёт возможность расширить сектор захвата и получить амплитудную модуляцию сигнала приходящего от командного пункта управления (КПУ). Отметим, что амплитудная модуляция принимаемого сигнала в оптическом диапазоне волн ранее использовалась в головках самонаведения (ГСН), при этом имелось изменение по частоте в зависимости от места расположения цели. Соответственно вращение патч-антенны с предлагаемым устройством требует меньшего потребления энергии, чем сканирование лучом антенны с помощью механизма на рисунке 22, так как связано только с потерями на восполнение от трения. В головках самонаведения ракет в радиодиапазоне при вращении основного луча антенны не механическим, а электронным способом, отклонение по углу от цели осуществляется по уровню 3 дБ, и нахождение цели определяется по смещению в сторону минимума сигнала. В нашем случае вращение антенны по рисунку 23 вокруг оси по нормали от плоскости антенны даёт точное направление на командный пункт при максимуме сигнала и отсутствии модуляции по частоте со скоростью вращения антенны. При этом для определения координат КПУ по азимуту и углу места, с учётом нормированной амплитуды модуляции соответствующей разнице в уровнях диаграммы направленности эллипса основного луча, необходимо обеспечить привязку начала вращения к угловому положению первой половины эллиптической формы луча в плоскости вращения по рисунку 23. Это можно сделать на основе фотоприёмника на обратной стороне нашего радио-модуля, а светодиод разместить на опорной конструкции механизма вращения так, чтобы при вращении патч-антенны фотоприёмник был соосен со светодиодом лишь в одной точке. Можно также предусмотреть и иной вариант определения начала отсчёта, например, вариант замыкания электрической цепи через электрощётку в определённые моменты времени при вращении радио-модуля. Соответственно повторение фото импульса от светодиода или импульса тока будет только через 360 градусов, и он привязан к первой половине эллипса луча антенны БПЛА. Смещение фазы принимаемого амплитудно-модулированного сигнала от фото импульса в фотоприёмнике, с учётом нормировки амплитуды входного сигнала по размаху, даст значение угла места и азимута КПУ относительно нормали полотна патч-антенны. Понятно, что возможна неоднозначность (она показано в виде красной точки на рисунке 23) из-за того, что амплитуда сигнала будет меняться в 2 раза чаще. Чтобы разрешить эту неоднозначность можно использовать небольшое угловое отклонение луча патч антенны в одну из сторон предполагаемого нахождения КПУ за счёт механизма управления по рисунку 22. Если амплитуда сигнала возросла, то направление на местоположение КПУ определено верно, если упала, то значит это ошибочный неоднозначный ориентир. Неоднозначность может быть решена и за счёт изменения направления движения БПЛА в сторону предполагаемой точки нахождения объекта связи по тому же самому признаку изменения амплитуды. Кроме того, отметим, что эта неоднозначность связана с принадлежностью КПУ к верхней или нижней полусфере, поэтому если заранее известно в какой полусфере находится КПУ, то неоднозначность решается автоматически. Однако при определении местоположения КПУ с высокой точностью не обязательно иметь направление нормали к поверхности патч-антенны предлагаемого устройства в направлении на КПУ. Более точным будет способ, основанный на нахождении КПУ в точках расположения по рисунку 23, то есть, когда основной луч патч-антенны при вращении, за счёт формы эллипса, периодически захватывает точку нахождения КПУ. В этом случае мы будем иметь периодическую связь с КПУ в течение времени попадания КПУ в луч патч-антенны, что показано на рисунке 24.
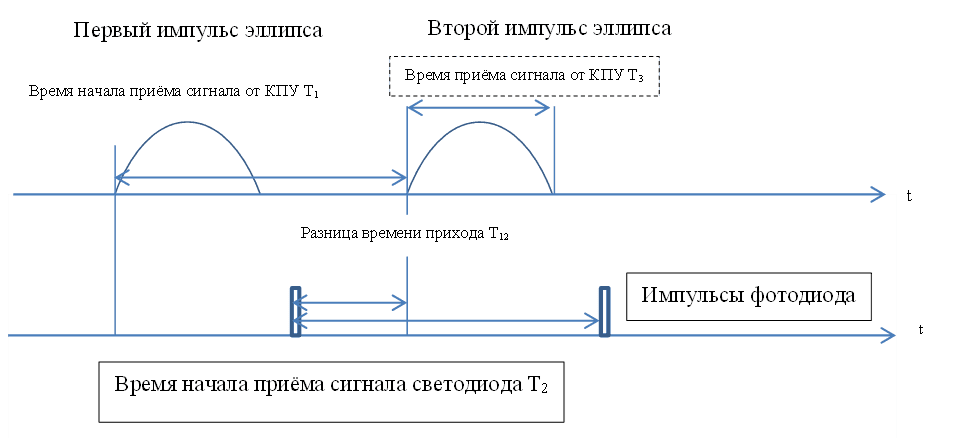
Рис. 24. Временная диаграмма, определяющая формирование времени приёма сигнала от КПУ
Соответственно время Т12+Т3/2 пересчитывается в градусы угла, аналогично «стрелке часов на циферблате», от фиксированного места расположения на БПЛА светодиода, который имеет привязку к системе координат БПЛА, до места начала приёма сигналов от КПУ. Время приёма сигнала от КПУ – Т3, благодаря форме эллипса диаграммы направленности, позволяет определить величину радиуса («длину стрелки») и на основании этих значений можно вычислить местоположение КПУ по направлению. Теперь определим необходимые параметры электродвигателя. В соответствии с этим отметим, что константа скорости или постоянная скорость (KV) это очень важный параметр при выборе бес коллекторного мотора для квадрокоптера. Она обозначает теоретическое увеличение оборотов вала мотора без нагрузки при увеличении напряжения на 1 Вольт. Например, если запитать мотор 2300 KV батареей 3S на 12,6 В, то вал будет крутиться со скоростью 28980 оборотов в минуту (2300 х 12,6), без лопастей. Но это приблизительная величина и она всегда указана на маркировке мотора. Так как у нас вместо лопастей вращается наше устройство с патч антенной, то основное сопротивление будет связано с трением и главная задача - обеспечить начальный момент вращения или тяги, для данного вида двигателя он доходит до 630 грамм. Соответственно, если исходить из стандартной скорости вращения вокруг центра масс со скоростью 5000 оборотов в минуту, то мы получим частоту амплитудной модуляции для принимаемого сигнала КПУ в 83 Гц. На дальности в 400 км для точности определения местоположения по углам в 1 м тангенс должен соответствовать величине 0,0000025. Отсюда для точности определения местоположения необходима точность определения местоположения по углам в 0,001 градус. Такое требование может быть снижено в 10 - 100 раз на основе сочетания с другими методами триангуляционного определения местоположения [3]. Это означает, что требуются такты временного отчёта с частотой в 360 кГц за один оборот в 360о за одну секунду. Однако при учёте скорости вращения предлагаемого устройства с патч-антенной в 83 Гц тактовые импульсы должны иметь частоту повторения не менее 29,88 МГц. Практически, если взять скорость вращения устройства с патч-антенной в 105 об/сек (6300 об/мин), то мы получим совпадение скорости передаваемой информации в 38 Мбит/сек со скоростью повторения тактовых импульсов. При скорости вращения 105 об/сек БПЛА при скорости в 69,45 м/сек (250 км/час) переместится на 0,66 метра, что допустимо при погрешности вычисления местоположения в один метр. На АЦП у нас поступает тактовая частота в 114 МГц. Как мы показали в [1], в этом случае, как минимум, имеется в ПЛИС достоверная информация, с учётом теоремы Котельникова и ошибки дискретизации, в два тактовых импульса. Однако это требует на дальности в 400 км принимать сигналы от КПУ по одному символу. Для различения символов с тактом в 38 МГц можно использовать код Манчестера, что значительно улучшает чувствительность, так как точно известна последовательность смены фазы. При ошибке можно, на основе сплайна с учётом последующих и предыдущих точек, а также с учётом известной формы диаграммы направленности спрогнозировать значения. Надо отметить, что постоянная ошибка, связанная с наличием требования знания точного углового местоположения до 0,001 градуса может быть учтена ещё в ходе испытательного полёта на основе сравнения различных методов вычисления местоположения БПЛА. Кроме того, для того, чтобы принимать сигналы с учётом достоверной информации по амплитуде сигнала нам требуется соответствующий энергопотенциал антенны и передатчика КПУ. При этом коэффициента усиления луча антенны БПЛА радио-модуля Gи= Gбпла=7,94 (9 дБ) с мощностью в 4 Вт явно недостаточно. Если предположить модульную конструкцию сборки АФАР и передатчика КПУ по принципу предлагаемых радио-модулей, то необходимо обеспечить соответствующие входы-выходы через ключи, когда управляющим будет являться дополнительный радио-модуль. Здесь сигнал первой гетеродинной частоты с учётом смещения по частоте Доплера или несущая частота с информацией от одного из УМ дополнительного радио-модуля с предусмотренного выхода через ключ поступает на устройство деления сигнала, где в качестве делителей можно использовать DS52-000. Далее, через предусмотренный СВЧ вход, сигнал от дополнительного радио-модуля, через соответствующий ключ поступает на балансный модулятор AD8346 каждого радио-модуля АФАР. Одновременно при приёме сигнала на АФАР, на специальный вход дополнительного управляющего радио-модуля, через устройство суммирования сигналов, например, на основе SCP-4-1+, поступают через соответствующие ключи сигналы с выходов логарифмических усилителей AD8309 радио-модулей АФАР. Специальный вход дополнительного радио-модуля также через ключ (например, SKY13290-313LF) связан с его демодулятором на основе смесителей AD831. Таким образом, используется один общий синтезатор частоты для формирования как гетеродинного сигнала со смещением по частоте Доплера, так и сигнала информации на соответствующей несущей частоте. При этом изменение фаз в радио-модулях, формирующих АФАР, с целью управления лучом АФАР, обеспечивается подачей через ЦАП AD9763 этих радио-модулей АФАР соответствующих сигналов, определяющих фазу от ПЛИС. Отсюда, при 8 радио-модулях АФАР с наличием ещё одного девятого управляющего радио-модуля и устройства сложения и разветвления, мы можем получить общую мощность Pкпу=32 Вт, с коэффициентом усиления луча антенны КПУ Gкпу=63,52. Надо отметить, что полученная АФАР будет иметь толщину порядка 1,6 см, это в 2 раза меньше толщины АФАР для космических спутников системы связи Iridium. Размеры мобильного устройства Iridium 9555 составляют 143×55×30мм при весе 266 г. Это означает, что предлагаемое устройство может использоваться и как мобильное устройство связи и как элемент АФАР. Как мы уже отметили выше, несущая частота fи =2,4 ГГц (длина волны λи=0,12499 м). Выбираем отношение сигнал/шум q=27 (вероятность ошибки для ФКМ сигнала 10-7 [7]), при шумовой температуре Тш=600 К, соответственно в формуле k – постоянная Больцмана, дальность Dкпу=400км.
 (4)
(4)
При этом размеры устройства АФАР КПУ будут 28 см ×28 см, что практически совпадает с размерами наземных антенн Starlink для Интернет, но преимущество у нас в том, что мы имеем модульную конструкцию по сборке АФАР из многофункциональных радио-модулей.
Соответственно после определения направления на КПУ можно использовать выставление луча основного лепестка антенны БПЛА в максимум приёма. Понятно, что у нас повышенные требования в плане связи системы координат БПЛА с устройством управления по рисунку 22 с точностью соответствия по углам до величины не более 0,001 градус. Однако это связано с технологией изготовления механизма управления патч-антенной, показанного на рисунке 22, и при фиксированных значениях установки антенны за счёт механизма управления углы могут быть определены достаточно точно. Кроме того, при использовании запросно-ответной системы [3] мы можем измерить и дальность от БПЛА до КПУ с точностью менее одного метра, что обеспечивается благодаря тактовой частоте от 114 до 228 МГц. Напомним, что в GPS заложена тактовая частота в 200 МГц при бинарном квантовании. Соответственно мы можем сделать замеры дальности в нескольких точках в соответствующие промежутки времени и при известной дальности перемещения БПЛА (метод измерения рассматривается ниже) мы можем проводить соответствующую коррекцию по определению местоположения. В итоге данный способ измерения позволяет заменить систему ГЛОНАСС (GPS) при известных точных значениях местоположения КПУ на карте местности. Этот способ определения местоположения даёт возможность с высокой точностью определить и направление на источник помех. А это позволяет использовать такой оригинальный метод подавления помехи (помимо известных методов смены поляризации, накопления по коду и изменения параметров сигнала с изменением несущей частоты) как выставление в ноль или минимум значения диаграммы направленности антенны БПЛА в направлении на источник помех. С этой целью в безэховой камере проводятся измерения диаграммы направленности, как на горизонтальной, так и на вертикальной поляризации с учётом используемых несущих частот в автоматическом режиме. Соответственно формируется в карте памяти соответствующая таблица, на основании которой, после определения местоположения источника помех, проводится соответствующее управление механизмом по рисунку 22 с учётом динамики движения БПЛА. Изменение положения нулей диаграммы направленности можно также изменять за счёт изменения несущей частоты. Принцип определения наличия помех выявляется логически по отсутствию или искажению принимаемого кодового сигнала от КПУ в ожидаемые моменты времени, а также на основании перегрузки входного тракта с вхождением его в насыщение, после чего осуществляются все предлагаемые методы исключения помех. Кроме того, возможно использовать уничтожение источника помех путём наведения на него БПЛА за счёт метода рассмотренного выше. Здесь, за счёт механизма управления по рисунку 22 можно поддерживать оптимальный режим для точного движения в направлении на источник помех. Кроме того, при загрузке карты местности точное определение по углам источника помех относительно БПЛА (а его координаты нам известны после замеров относительно КПУ) позволит найти точку пересечения с рельефом местности, и в данную точку может быть нанесено огневое поражение. Таким образом, мы используем все известные методы подавления помех при оптимальной конструкции предлагаемого радио-модуля.
Ещё одной функцией, которую необходимо определять для БПЛА, это измерение скорости движения БПЛА относительно Земли. Это позволяет на основе определения пройденной дальности и с учётом метода рассмотренного выше вычислить триангуляционным методом, при замерах в нескольких точках, истинное местоположение БПЛА. То есть, измерение смещения по частоте Доплера позволяет определять пройденное расстояние, и на основе этого прогнозировать местоположение. Одновременно желательно знать и высоту полёта, что позволяет перемещаться с огибанием рельефа местности, и чем меньше высота полёта, тем выше сигнал, отражённый от Земли, и соответственно качество определения смещения по частоте Доплера. Отметим, что смещение частоты Доплера будет точно соответствовать скорости движения БПЛА при отражённом сигнале прямо по курсу движения, но при этом дальность определения по отражённому сигналу равна практически бесконечности. Соответственно, в этом случае не обойтись без механизма управления антенной по рисунку 22 с наклоном антенны к земле.
Рассмотрим теперь вопрос о достижении чувствительности и необходимой мощности сигнала для измерения скорости по смещению частоты Доплера с учётом высоты полёта БПЛА, например, в 70 метров. Вычислим необходимые параметры для радиовысотомера БПЛА. Если исходить из наличия двух патч и сравнить её с 4-мя патч по рисунку 19 по коэффициенту усиления в диапазоне несущих частот 2,4 ГГц [6], то в этом случае коэффициент усиления антенны должен быть равен 11,5 дБ. Однако мы будем считать, что мы смогли достичь лишь 9 дБ, что соответствует теоретической величине коэффициента усиления одного патч. В этом случае считаем коэффициент усиления луча антенны радиовысотомера БПЛА Gпрди= Gпрми=Gпрми=7,94 (9 дБ). Как мы ранее отмечали, мощность от одного усилителя SZA-2044 (2-2,7 ГГц) составляет Pпрд1=1 Вт, а так как у нас 4 таких усилителя, то общая мощность Pпрди=4 Вт. Как мы уже отметили выше, выбираем несущую частоту fи =2,4 ГГц (длина волны λи=0,12499 м). Соответственно считаем эффективную поверхность рассеяния порядка σ=1 м2, при этом мы имеем потери на поглощение при отражении от подстилающей поверхности Rзат=100 (20дБ). Выбираем отношение сигнал/шум q=27 (вероятность ошибки для ФКМ сигнала 10-7 [7]), при шумовой температуре Тш=600 К, соответственно в формуле k – постоянная Больцмана,
Отсюда имеем полосу пропускания:
 (5)
(5)
Таким образом, при высоте в 70 метров мы можем обеспечить зондирующий импульс с полосой в 38 МГц. Как мы отмечали ранее в работах [1-4], при накоплении зондирующих импульсов можно обеспечить точность определения высоты до 0,1 метра с использованием сплайнов (от 2-х до 3-х точек) с учётом амплитуды накопленных импульсов по 3 - 4 потокам внутри ПЛИС разнесённым с задержкой на такт в 114-150 МГц. Принцип улучшения характеристик по точности с учётом сплайнов будет рассмотрен ниже. Соответственно теперь, вычислим доплеровскую частоту Fд при скорости БПЛА в 250 км/час (Vбпла=69,45 м/сек) и несущей частоте f=2,4 ГГц по формуле:
 (6)
(6)
С учётом скважности сигнала на приём и передачу равного двойке Q=2, можно вести накопление сигнала в течение 0,5618 млсек, за один период смещения по частоте Доплера, что соответствует частоте в 1,78 кГц. В [4] мы показали возможность выделения при цифровой фильтрации информации со скоростью в 250 бит/сек при использовании ФКМ кода в 1000 бит при скорости символов в коде в 38 Мбит/сек. Собственно данный предел при накоплении оправдан тем, что при движении в 69,45 м/сек и при накоплении сигналов в полосе 250 Гц, БПЛА переместится на 0,2778 метра, то есть, в этом случае ошибка за счёт движения БПЛА при таком накоплении не превышает 0,3 метра. При передаче кода со скоростью в 38 Мбит/сек мы за 0,5618 млсек обеспечим накопление 21348 импульсов. Это означает, что при наличии отражения от земли порядка σ=1 м2 и поглощением в 20 дБ по условиям по формуле (5) мы имеем эквивалент по возможной высоте по приёму такого накопленного сигнала в 0,846 км. При этом при измерении смещения по частоте Доплера угол наклона антенны к подстилающей поверхности определяется соотношением катета к гипотенузе в величину равную 0,08274231. По косинусу это эквивалентно cos(85,255о)=0,08272124. Соответственно изменение смещения частоты Доплера при угле наклона измерения к земле в направлении движения составит величину соs(4,745о)= 0,996572725. Это даст смещение по частоте Доплера по формуле (6) с учётом угла наклона порядка 0,886949725 кГц. При этом вычисляемая скорость будет эквивалента величине 69,21197575 м/сек. Отсюда разница по скорости составит значение минус 0,238 м/сек. Соответственно за 10 секунд ошибка будет в 2 метра, что недопустимо. Конечно, эта величина может быть учтена при точном определении наклона нормали антенны БПЛА к поверхности земли. Как мы уже отмечали выше, неточность установки углов при управлении антенной в системе координат БПЛА за счёт механизма управления по рисунку 22 не должна превышать значения 0,001о в целях определения местоположения БПЛА с точностью до 1 метра при замещении системы GPS. Отсюда при добавлении ошибки в 0,001о имеем соs(4,746о)= 0,996571281172662. Это даст смещение по частоте Доплера по формуле (6) с учётом угла наклона порядка 0,886948440 кГц. При этом вычисляемая скорость будет эквивалента величине 69,2118754 м/сек. Отсюда неточность из-за ошибки в 0,001 градус равняется 0,0001003 м/сек. Понятно, что в этом случае ошибка в определении по дальности за 120 минут составит 0,72 м, а БПЛА за это время пройдёт расстояние в 500 км. Как мы уже отмечали выше, требования по точности определения углового положения достаточно высоки, но ошибка, возникающая при этом, будет постоянна и может быть исключена ещё на этапе поверочных полётов БПЛА.
Теперь определим, чему равна ошибка при вычислении смещения по частоте Доплера за счёт измерения с тактом цифровой дискретизации сигнала по частоте Доплера внутри ПЛИС в 38 МГц. Как мы отмечали выше, количество тактов дискретизации за один период в 0,89 кГц, во время которого осуществляется приём сигнала при скважности Q=2, при такте в 38 МГц составит величину 38 МГц/1,780262 кГц=21348. Соответственно неточность при ошибке в один такт дискретизации в сторону увеличения даст количество в 21349 подсчитываемых тактов, а в пересчёте на частоту смещения по Доплеру это составит 1,77994285 кГц. И здесь мы имеем разницу по сравнению с величиной смещения по частоте Доплера 0,89 кГц (69,45 м/сек) в 0,159572 Гц. Это даёт отношение изменения в частоте смещения по Доплеру в 0,9998207 раз, что соответствует скорости 69,437548 м/сек и ошибке в определении скорости в 0,01245 м/сек. Тогда через минуту ошибка в определении пройденной дальности будет 0,747 м при прохождении расстояния в 4167 м. Отсюда следует, что надо искать пути снижения ошибки по определению смещения по частоте Доплера. Так неточность из-за дискретизации может быть снижена, если учесть амплитуду выделяемого сигнала смещения частоты Доплера и обеспечить аппроксимацию на основе разницы амплитуд в месте перехода через ноль. В [4] мы показали, что согласованная цифровая фильтрация в ПЛИС по дискриминационной характеристике (cos_s3), по которой обеспечивается работа фазовой автоподстройки частоты (ФАПЧ) имеет треугольную форму (XORA3_BUF) показанную на рисунке 25.
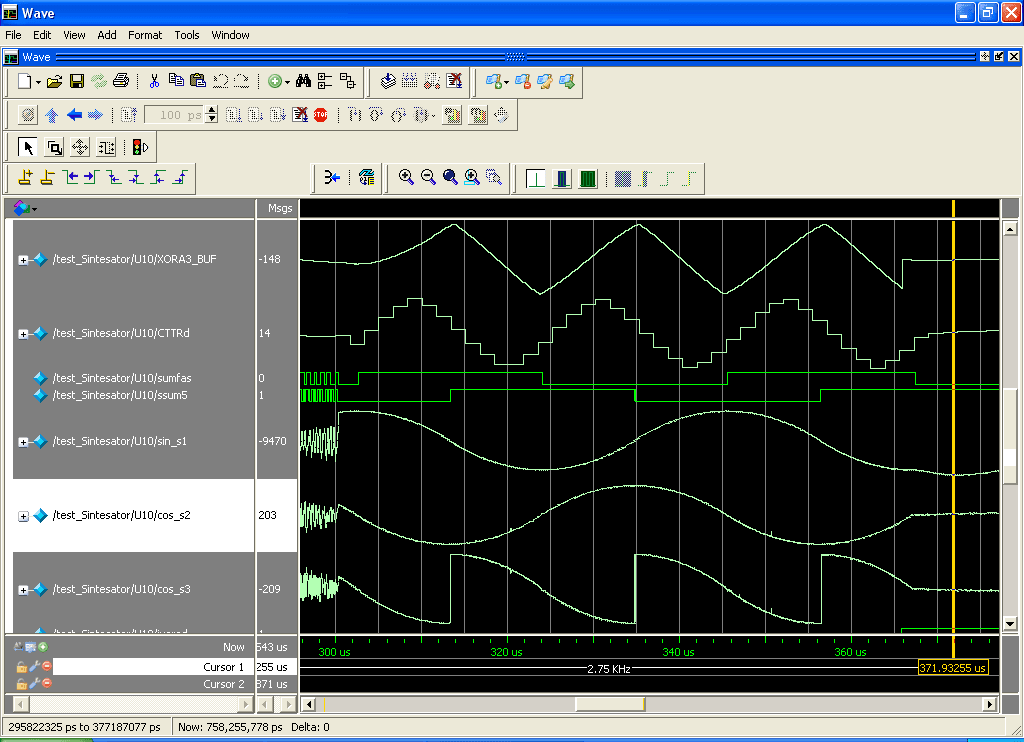
Рис. 25. Вариант накопления кода в 64 бита с частотой смещения в 23 кГц
Отсюда мы можем достаточно точно на основе разницы амплитуд определить точку пересечения с нулём для оценки смещения по частоте Доплера, с учётом накопленной амплитуды сигнала по рисунку 26.
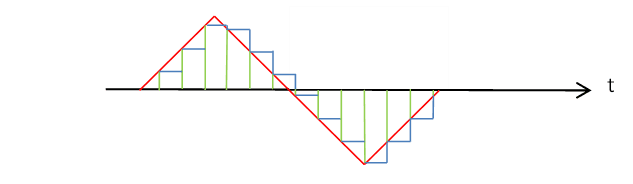
Рис. 26. Дискретизация при цифровой фильтрации с тактом в 38 МГц
Из рисунка 26 мы видим, что точность определения места прохождения через ноль будет зависеть от точности определения амплитуд. При АЦП с разрядностью в 14 бит мы имеем возможный размах изменения по числу градаций на величину ±8192. Это число будет изменяться при треугольной форме по рисунку 26 при цифровой фильтрации от максимума до минимума за 5337 тактов при частоте 0,89 кГц. При линейной форме это равняется изменению в 3 градации на расстояние одного такта. Отсюда возможно пересечение нуля в 3 точках между тактами. С учётом сплайна из двух соседних тактов, находящихся между нулём, мы имеем по 3 градации на каждый такт, соответственно комбинации градаций дадут 9 точек пересечение через ноль. При сплайне от 3 тактов мы будем иметь 27 возможных точек пересечения через ноль между двумя соседними тактами, находящимися между нулём. С учётом того, что один крайний такт при сплайне из трёх тактов может находиться как до точки пересечения с нулём, так и после, то возможное количество точек пересечения с нулём увеличивается до 54. И тогда учёт амплитуды даст уменьшение ошибки в скорости до величины 0,00023 м/сек. В этом случае за 60 минут движения БПЛА ошибка оценки местоположения будет равняться 0,83 метра, при этом БПЛА переместится на 250 км. Понятно, что этот расчёт сделан с учётом достижения необходимой чувствительности на дальности в 846 метров за счёт накопления 21348, при полосе в 890 Гц. Однако, исходя из скорости БПЛА в 69,45 м/сек мы можем сделать оценку на основе пяти периодов. Однако, исходя из скорости БПЛА в 69,45 м/сек, мы можем сделать оценку на основе пяти периодов (полоса в 178 Гц), что ещё больше снизит ошибку вычисления смещения по частоте Доплера. При этом ошибка за счёт движения БПЛА составит величину (69,45 м/сек×5)/(890 Гц)=0,39 м. Следовательно, автономный проход БПЛА на дальность в 250 км-500 км с вычислением этой дальности по смещению частоты Доплера в течение часа обеспечит сброс груза с точностью до метра. Отметим ещё раз, что, требования к точности установки угла наклона механизма управления по рисунку 22, при сочетании места определения БПЛА методом, предложенным нами по рисунку 23, в сочетании с точностью определения дальности пути пройденным БПЛА на основе данных по смещению по частоте Доплера за малый промежуток времени, могут быть снижены. Это достигается замерами значений дальностей в разных точках местоположения БПЛА через триангуляционные методы вычислений, что нами было рассмотрено в [3]. Понятно, что переход на более высокие несущие частоты порядка 5 ГГц улучшит условия отражения от поверхности земли и уменьшит ошибку в вычислении смещения частоты Доплера. Здесь возможно усреднение по большему количеству периодов, однако здесь происходит ухудшение по излучаемой мощности и площади поверхности антенны, что требует компромиссного решения. Надо отметить, что, так как отражение от поверхности земли связано с поглощением и ухудшает отражённый сигнал на 20 дБ, то отражение от металлических поверхностей будет на 20 дБ выше. Это позволяет определять нахождение таких объектов как танки и артиллерийские установки при σ=1 м2 (в реальности эффективная поверхность рассеяния гораздо выше) на дальности 846 м×(100)1/4=2,675 км. Одновременно, способ определения углового положения, рассмотренный выше, позволит осуществить и наведение на цель. При этом есть возможность определять и скорость движения цели с наведением в упреждающую точку. Таким образом, мы видим, что предлагаемый радио-модуль имеет высокую помехозащищённость и многофункциональное применение как в качества средства связи, радиоуправления, так и в качестве обеспечения навигации и радиолокатора.
Соответственно теперь мы должны рассмотреть вопрос о питании радио-модуля в БПЛА. Для БПЛА малой дальности для питания предлагаемого радио-модуля можно использовать аккумуляторную батарейку, размещённую на самом устройстве отдельно от общего источника питания на БПЛА, так как время работы БПЛА мало. При этом передачу информации от радио-модуля к устройствам БПЛА и обратно можно осуществлять через Wi-Fi, устройство которого может быть встроено аналогично тому, как это сделано в смартфоне. Но возможен и иной вариант, когда питание и передачу информации к вращающемуся радио-модулю можно осуществлять через изолированные подшипники, расположенные на оси вращающегося стержня электродвигателя, например, по рисунку 27.
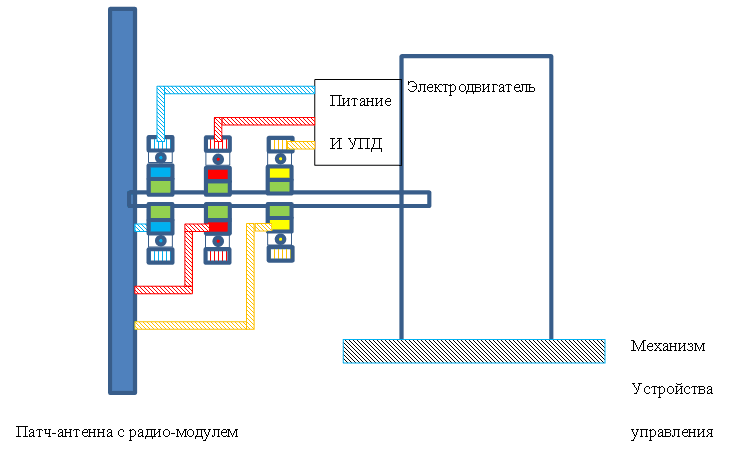
Рис. 27. Схема соединения вращающегося радио-модуля с патч антенной с электродвигателем и механизмом управления по рисунку 22 с передачей данных в устройство передачи данных (УПД) и питанием
Здесь, к внутренней стороне кольца подшипника, который соединён через изолирующее кольцо, впрессованное в металлический стержень вращения, подводится провод напряжения питания или провод передачи данных. Съём напряжения питания происходит с внешнего кольца подшипника через шарики подшипника (для большей площади контакта могут быть ролики). Возможна также схема передачи питания на основе так называемых электрощёток, используемых в электродвигателях, а информация будет передаваться через Wi-Fi. Понятно, что БПЛА могут использоваться для доставки полезного груза участникам военной операции на театре военных действий (ТВД) на территорию. противника. И возможна ситуация, когда наличие помех системе навигации не даст возможности определить точно место нахождения. В этом случае, при прибытии в предполагаемый район, БПЛА формирует сигнал запроса на связь по кодовому сигналу с большим накоплением, и на основании скрытого кодового ответного сигнала начинает определение его местоположения по методу, рассмотренному выше с учётом триангуляционного метода по [3]. На основании определения местоположения происходит движение БПЛА, а запросно-ответная система позволит точно осуществить сброс полезного груза.
Таким образом, в результате проведённого анализа по оптимизации конструкции предлагаемого радио-модуля мы видим, что уже сейчас на основе радиодеталей ширпотреба можно конструировать экспериментальные образцы для проверки возможных режимов работы и даже конструировать АФАР. Кроме того сделанное обоснование конструкции говорит о том, что никакого другого более перспективного направления развития радио-модуля с учётом помехозащищённости и выполняемых функций просто быть не может. Более того, ни одна зарубежная фирма не сможет поставить такое многофункциональное устройство. Улучшения будут происходить только через создание миниатюрных радиодеталей, в виде микросхем с уменьшением энергопотребления с учётом согласования с частотным диапазоном патч-антенн (возможно в будущем при наличии радиодеталей широкого диапазона частот использовать съёмную конструкцию патч-антенн). Однако и в этом сейчас уже достигнут практически максимум. Одновременно габаритные размеры предлагаемого радио-модуля по длине, ширине и высоте также практически оптимальны и соответствуют современным смартфонам. Потребление мощности цифровых микросхем растёт с повышением частоты, что требует охлаждение через радиаторы, охлаждение также необходимо и для усилителей мощности, а это не позволяет уменьшить размеры радио-модуля по толщине. Вид прямоугольной формы позволяет использовать патч антенны с наличием основного луча антенны в форме эллипса. За счёт этого добавляется функция, обеспечивающая наведение по методу, рассмотренному выше, а также возможно отстройка от источника помех не только традиционными методами, но и за счёт попадания источника помех в точку характеристики диаграммы направленности с нулевым значением.
