В соответствии с [1, 2, 3, 4] мы установили оптимальные радиотехнические параметры для радио-модуля БПЛА и первичные возможные функциональные схемы с учётом использования в широком диапазоне частот для радиоуправления, радиосвязи и навигации с определением максимума по скрытности передаваемого сигнала для средств радиотехнической разведки (РТР). При этом максимальная скорость передачи информации в режиме BPSK была определена в 38-50 Мбит/сек, в режиме QPSK в 76-100 Мбит/сек, а в режиме QAM в 114 -150 Мбит/сек. Тактовая частота дискретизации должна быть от 114 до 150 МГц, что связано с необходимостью наличия 3 тактов на символ с целью исключения ошибки дискретизации при выполнении теоремы Котельникова. Аналого-цифровой преобразователь (АЦП) должен иметь разрядность в 13-14 бит для повышения точности определения смещения частоты Доплера, и времени прихода сигналов для навигации за счёт использования сплайнов. Кроме того, мы показали возможность размещения радиоэлементов для узлов БПЛА на платах при наличии размеров не более, чем у аналогов и прототипов, и привели первичные соответствующие функциональные схемы. Далее в [5] мы рассмотрели оптимизацию радио-модуля БПЛА на основе выбора конкретной электрической схемы и конструктивного размещения радиоэлементов с учётом многофункциональности и ширпотреба, так как это позволяет значительно сократить издержки по изготовлению и быстро осуществить экспериментальную проверку режимов работы. При этом оптимизация проведена с учётом сравнения с существующими аналогами и прототипами. Проблема непосредственного проводного подсоединения для связи с другими устройствами БПЛА при радиоуправлении не представляет проблем. В этом случае получаются наиболее высокие характеристики по быстродействию, при скорости передачи информации в 114-150 Мбит/сек. Однако, это означает возможность работы только в совокупности с другими радиотехническими средствами в одном общем устройстве, и исключает возможность автономной работы в виде отдельного приёмо-передающего устройства. Например, если учитывать возможности использования радио-модуля БПЛА в многофункциональном режиме, в качестве средства определения местоположения на основе связи с командным пунктом управления (КПУ) при точном определении его координат, а также возможность наведения БПЛА на источник помех, то здесь, при использовании вращения радио-модуля по [5] в целях навигации, что видно из рисунка 1, желательно иметь беспроводную связь с автономным питанием.
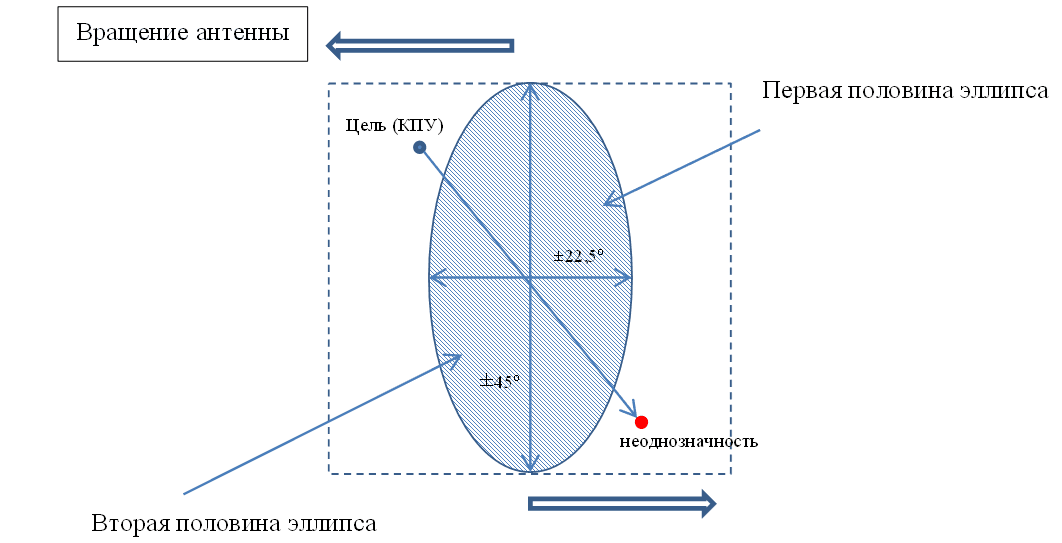
Рис. 1. Диаграмма направленности основного луча, состоящей из восьми патч для несущих частот от 3-5,1 ГГц
Отметим, что сам принцип определения углового положения цели или КПУ подобен тому, что применяется в головках самонаведения по инфракрасному излучению по рисунку 2, где сигнал от цели фокусируется за счёт линзы 3, проходя через диск 1, на фоточувствительных элементах на полотне 2. Сигнал рассогласования определяется на основе изменения частоты электрического сигнала в фоточувствительных элементах.
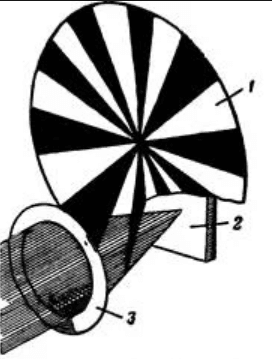
Рис. 2. Принцип работы ГСН инфракрасного диапазона волн
Однако преимущество способа описанного в [5] связано с тем, что проводятся замеры по мощности принимаемого радиосигнала от КПУ при отсчёте от некоторого начального углового положения при вращении диаграммы направленности в виде эллипса, формируемой патч-антенной, как показано на рисунке 3.
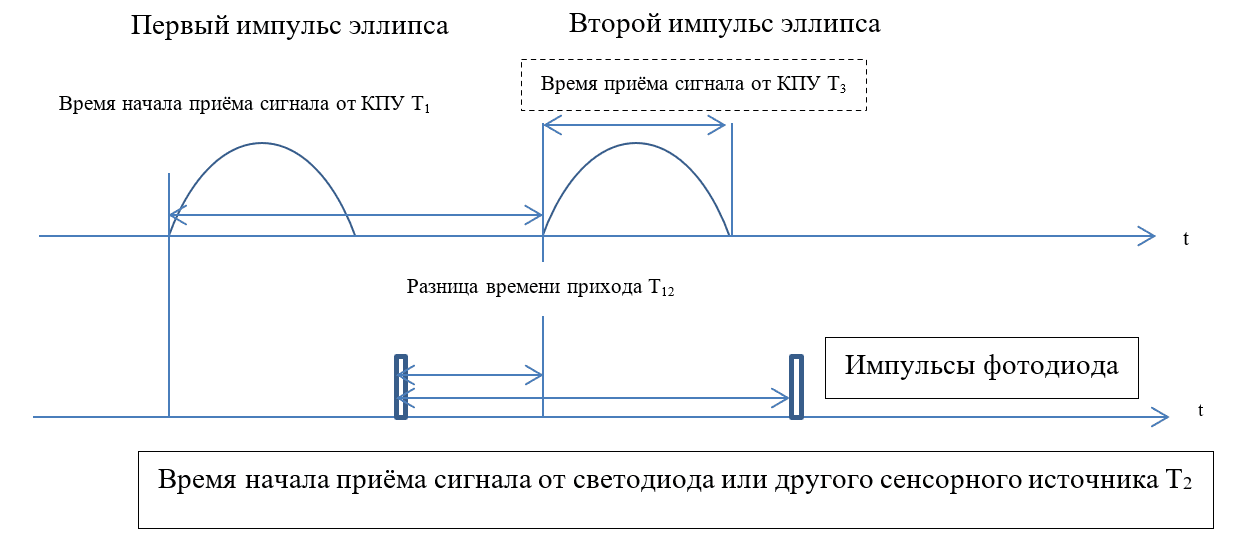
Рис. 3. Временная диаграмма, определяющая формирование времени приёма сигнала от КПУ
Как показано в [5], это позволяет определять угловое местоположение с точностью порядка 0,001 градуса, что даёт ошибку по координатам относительно местоположения КПУ на дальности в 400 км не более 1 метра. При этом отметим, что известны преобразователи сигналов датчиков углового положения (сенсорная система на кристалле) на микросхеме типа К1382НМ035 с разрядностью углового разрешения в 18 бит, что составляет 0,00137 градусов.
Понятно, что беспроводная связь необходима и в случае работы радио-модуля БПЛА в качестве ретранслятора для совместимости с другими радиотехническими средствами и устройствами. Действительно, для обеспечения работы в Интернет из любой точки мира при связи через космические спутники требуется повышать мощность излучения, и частота излучения может доходить до 6 ГГц и более. В этом случае абоненту желательно находится на некотором безопасном расстоянии от точки излучения, что возможно на основе перехода к беспроводной связи. Отсюда следует необходимость оптимизации беспроводной связи для радио-модуля БПЛА с условием многофункционального использования с учётом конструктивного исполнения. В силу того, что радио-модуль уже представляет собой, и приёмник, и передатчик, то беспроводная связь на частоте излучаемого и принимаемого сигнала уже обеспечивается, с использованием в качестве выходного устройства предусилителя, который имеет малую мощность излучения порядка 18 - 22 дБм. Здесь можно использовать разделение во времени со связью с КПУ в режиме приёма и передачи, а также обеспечить связь в режиме разделения во времени с другими устройствами БПЛА. Однако, если предположить, что приём и передача с КПУ и с другими БПЛА имеет одинаковые промежутки времени, то скважность составляет Q=4. Это приводит к уменьшению потока информации в 4 раза и вместо, например, передачи потока в 123 Мбит/сек в режиме QAM, мы будем иметь поток в 30,75 Мбит/сек. При этом выдвигается требование по наличию оперативного запоминающего устройства (ОЗУ), где будет накапливаться информация на передачу и приём. Так, при передаче информации в 123 Мбит/сек в течение 8 млсек (это сопоставимо с циклом при разделении во времени, выделяемым на одного пользователя в режиме приёма-передачи в космической системе связи Iridium) нам потребуется память порядка 0,984 Мбит. Отсюда стоит вопрос об использовании дополнительного канала в режиме дуплекса по обеспечению приёма и передачи, но на другой несущей частоте, например, на частоте промежуточного канала, которая используется перед демодуляцией. Кроме того, помимо исключения от нежелательных последствий из-за излучения большой мощности, беспроводная связь на малые расстояния имеет преимущество в плане уменьшения дополнительных проводников и контактов. Надо отметить, что данный дополнительный канал на промежуточной частоте при использовании дополнительного усилителя мощности (он может быть встроен в антенну с частотой менее 1 ГГц) можно использовать и для обеспечения связи с КПУ или другими БПЛА. То есть, многофункциональность выражается и в том, что такой добавочный канал приёма и передачи на промежуточной частоте можно использовать для связи нескольких БПЛА в общую систему между собой, с выполнением обеспечения связи, навигации, обзора, наведения на цель. Иными словами мы получаем дуплексный режим работы, что обеспечивает преимущество выполнения операций в системе. Этот добавочный режим приёма и передачи повышает помехоустойчивость, так как если КПУ находится на дальности в 400 км, то БПЛА могут образовывать связь на более коротких расстояниях с исключением превышения помехи над сигналом.
Таким образом, исходя из необходимости сокращения издержек на изготовление на основе радиоэлементов ширпотреба, стоит задача по функциональному и конструктивному исполнению с учётом наличия беспроводной связи. Далее следует условие - обеспечить оптимизацию такого добавочного канала беспроводной связи с учётом конструктивного исполнения радио-модуля в габаритах смартфонов на радиоэлементах ширпотреба, и с учётом оптимизации по [5] по рисунку 4.
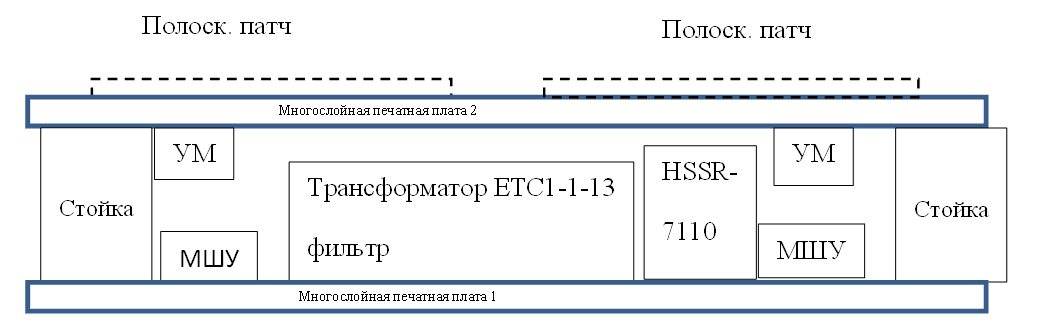
Рис. 4. Вид предлагаемой конструкции радио-модуля сбоку
Как видно из рисунка 4 для обеспечения дополнительной беспроводной связи с учётом дополнительных радиоэлементов у нас есть место для расположения с обратной стороны многослойной печатной платы 1. То есть, эта проблема может быть решена за счёт увеличения толщины предлагаемой конструкции радио-модуля и обычно это несколько миллиметров. Однако, если количество дополнительных радиоэлементов минимально, то вся конструкция может соответствовать предложенному варианту на рисунке 4. В соответствии с этим рассмотрим подробно функциональное исполнение устройства уже на радиоэлементах ширпотреба с наличием беспроводной связи на основе предлагаемого радио-модуля БПЛА с учётом технических преимуществ описанных в [1-5]. В результате проведённого анализа была выбрана функциональная схема по рисунку 5.
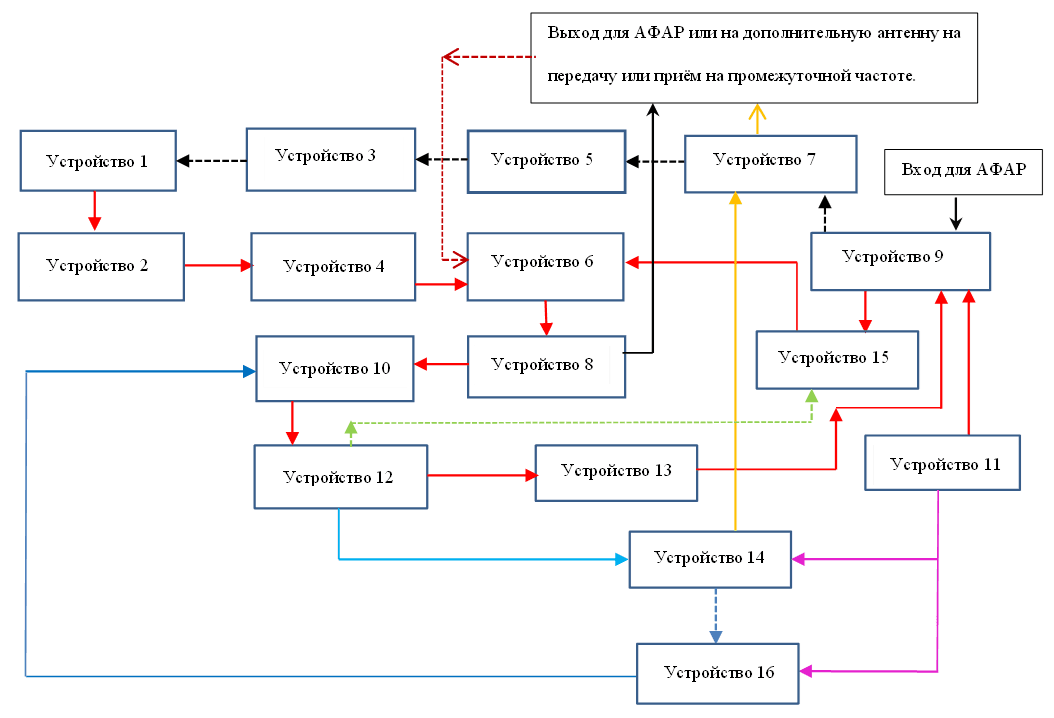
Рис. 5. Функциональная схема предлагаемого радиомодуля БПЛА с показом приёма на частоте выше 1 ГГц и его ретрансляцией на частоте менее 1 ГГц в режиме дуплекса
На рисунке 5 устройства выполняют следующие функции:
Устройство 1 представляет собой патч-антенны с наличием согласующих элементов по коэффициенту стоячей волны (КСВ), ключей на приём-передачу с получением вертикальной, горизонтальной и круговой поляризации.
Устройство 2 состоит из 4-х малошумящих усилителей (МШУ) расположенных соответствующим образом на многослойной печатной плате 1 по рисунку 6.
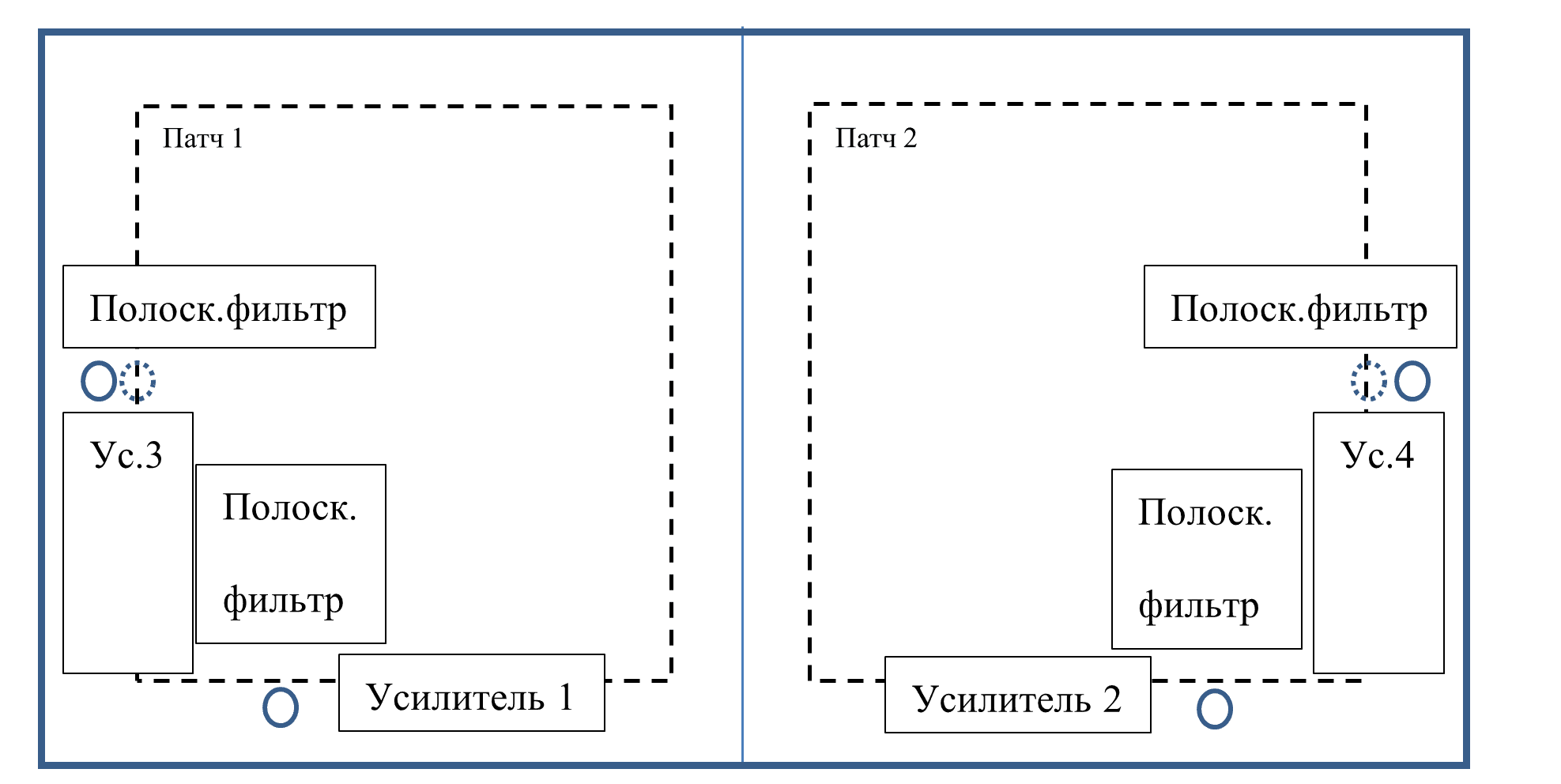
Рис. 6. Размещение входных МШУ и УМ на платах предлагаемого мобильного устройства
Устройство 3 на рисунке 5 состоит из 4-х усилителей мощности (УМ) расположенных аналогичным образом как по рисунку 6, только на многослойной печатной плате 2 по рисунку 4.
Устройство 4 на рисунке 5 представляет собой сумматоры от 4-х сигналов с МШУ, а также фазоинвертор на 180 градусов с использованием ключей и трансформатора для обеспечения круговой поляризации как правой, так и левой.
Устройство 5 представляет собой делители сигнала от предусилителя для поступления сигнала на 4 УМ, а также фазоинвертор на 180 градусов с использованием ключей и трансформатора для обеспечения круговой поляризации как правой, так и левой.
Устройство 6 – это МШУ со смесителем для компенсации потерь от ключей, сумматора, фазоинвертора, трансформатора, а также через ключ на него поступает сигнал на несущей частоте либо более 1 ГГц, либо менее 1ГГц.
Устройство 7 – это предусилитель для усиления сигнала до уровня необходимого для обеспечения максимальных значений мощности в 4-х УМ. Одновременно через ключ он подсоединяется к устройству 14 (балансный модулятор для частот ниже 1 ГГц) для усиления сигнала на промежуточной частоте с информацией от ПЛИС. Устройство 7 в зависимости от режима работы через ключ подсоединяется либо для передачи сигнала на УМ с частотой более 1 ГГц, либо на дополнительную антенну на частоту ниже 1 ГГц (напомним, что в антенну менее 1 ГГц может быть встроен усилитель мощности).
Устройство 8 на рисунке 5 состоит из усилителя после смесителя, фильтра, логарифмического усилителя на 100 дБ и ключа на выход для использования сигнала промежуточной частоты в режиме АФАР. При этом в качестве выхода может использоваться выход на дополнительную антенну.
Устройство 9 – это балансный модулятор на несущие частоты сигнала выше 1 ГГц с ключами, для обеспечения переключения сигнала с его выхода, либо на смеситель при приёме, либо на предусилитель для передачи информации на несущей частоте. В устройстве 9 предусматривается ключ на вход балансного модулятора для использования в режиме АФАР при подаче сигнала от одного общего синтезатора частоты через разветвитель на радиоэлементы АФАР.
Устройство 10 на рисунке 5 состоит из 2-х демодуляторов, дающих сигналы в квадратуре по синусу и косинусу, 2-х операционных усилителей, 2-х АЦП, 2-х компараторов, а также трансформатора для формирования сигналов в противофазе и 2-х делителей на 2 для формирования гетеродинных сигналов по синусу и косинусу.
Устройство 11 – синтезатор частоты для гетеродинной и несущей частоты выше 1 ГГц с наличием делителя частоты на 4 для формирования двойной промежуточной частоты менее 1 ГГц.
Устройство 12 это программируемая логическая интегральная схема (ПЛИС).
Устройство 13 представляет собой цифро-аналоговый преобразователь (ЦАП).
Устройство 14 – балансный модулятор для сигналов менее 1 ГГц.
Устройство 15, 16 – ключи.
Рассмотрим приём сигнала от КПУ на радио-модуль БПЛА на несущей частоте выше 1 ГГц с учётом автономной работы через радиосвязь в режиме дуплекса с другими устройствами БПЛА. Исходя из конкретной реализации, когда сумматор и делитель DS52-0007 имеет полосу пропускания в 2200 -2500 МГц, выберем наименьшую гетеродинную частоту Fг в районе 2200 МГц. Промежуточная частота в этом случае, исходя из предлагаемого варианта радио-модуля выбирается равной Fпр=(2200 МГц)/8=275 МГц. Отсюда мы имеем принимаемый сигнал информации на несущей частоте в Fc=Fг+Fпр=2475 МГц. Радиосигнал принимается на патч-антенны (устройство 1) и поступает на четыре МШУ (устройство 2) с обеспечением суммирования сигнала (устройство 4). Полученный сигнал усиливается в устройстве 6 в МШУ и преобразуется по частоте в смесителе (например, TQ5M31 в диапазоне от 0,5 до 2,5 ГГц) за счёт гетеродинной частоты в 2200 МГц от балансного модулятора (устройство 9). В устройстве 8 также происходит основное усиление и фильтрация на промежуточной частоте (Fпр), после чего сигнал поступает на демодуляторы (устройство 8), на вторые входы которых поступает гетеродинный сигнал в 275 МГц на промежуточной частоте в квадратуре по синусу и косинусу. Эти гетеродинные сигналы создаются через деление на 2 сигнала, который поступает через ключ (устройство 16) на двойной промежуточной частоте 2× Fпр =550 МГц. Он формируется за счёт деления основной гетеродинной частоты 2200 МГц на 4 в устройстве 11 от сигнала синтезатора частоты. Далее через дифференциальные операционные усилители и АЦП (устройство 8) демодулированные сигналы по синусу и косинусу в оцифрованном виде поступают на ПЛИС (устройство 12). Предусмотрено также параллельное поступление сигнала информации от дифференциальных операционных усилителей через компараторы на ПЛИС. В ПЛИС происходит обработка принимаемого сигнала с целью выделения информации, то есть обеспечивается символьная синхронизация и формируется сигнал для фазовой автоподстройки по частоте (ФАПЧ), который поступает на ЦАП (устройство 13). С ЦАП сигнал ФАПЧ поступает на балансный модулятор (устройство 9) в котором осуществляется необходимое смещение на частоту Доплера гетеродинной частоты в 2200 МГц. Весь путь прохождения необходимых сигналов при приёме сигнала информации от КПУ отмечен красными стрелочками. В этом случае при обработке сигнала в ПЛИС объём передаваемой информации в режиме QAM по проводной связи к общему устройству управления (УУ) лежит в пределах от 114 Мбит/сек до 150 Мбит/сек. Понятно, что для обеспечения беспроводной связи в режиме дуплекс с передачей аналогичного объёма информации на несущей частоте менее 1 ГГц необходимы дополнительные устройства. В этом случае помимо ключей, необходим балансный модулятор в диапазоне менее 1 ГГц, ЦАП и усиление сигнала до необходимого уровня мощности с выходом на дополнительную антенну с несущей частотой менее 1 ГГц. Это конечно увеличивает необходимую выделяемую площадь печатной платы под радиоэлементы ширпотреба, которая может быть решена, как мы уже отмечали выше, за счёт их расположения на обратной стороне многослойной печатной платы 1. Однако желательно обеспечить такое конструктивное решение, которое позволило бы получить те же самые характеристики по передаче данных, но с меньшим количеством радиоэлементов. Понятно, что уже сейчас есть вариант приёмопередатчика за счёт использования общей микросхемы, аналогичной, например, AD9361 по рисунку 7 с приёмом и передачей на разнесённых частотах. Данный приёмопередатчик работает на частотах от 70 МГц до 6 ГГц и имеет по частоте дискретизации достаточно близкие характеристики к нашему варианту в 110-140 МГц с преобразованием в цифру в 12 бит, и вполне может подойти на этапе преобразования сигнала с замещением устройств 6,8,9,10,11,13. Однако это осуществляется без использования нашей обработки сигнала, дополнительных функций для АФАР, навигации уже выделенных оптимально сигналов и исключён вариант исполнения в виде отдельного автономного устройства в силу наличия связи через провода с другими устройствами.
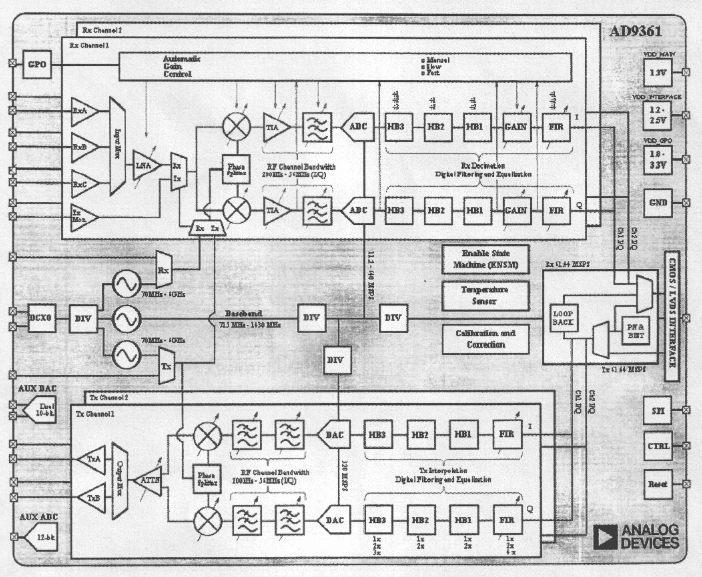
Рис. 7. Приёмопередатчик на микросхеме AD9361 в диапазоне от 70 МГц до 6 ГГц с полосой пропускания от 200 кГц до 56 МГц при размерах 10 мм×10 мм
Это связано с тем, что данная микросхема является отдельным радиоэлементом, в котором предусматривается определённый набор функций, как в режиме приёма, так и передачи. Сам подход, выбранный в данной микросхеме, соответствует классике выделения сигнала из шумов за счёт оптимальной фильтрации под спектр приходящего сигнала. Соответственно это исключает, например, обработку сигнала как это предложено нами с быстрой ФАПЧ и оптимальной символьной и частотной синхронизацией по [1, 4] в ПЛИС, так как после АЦП в микросхеме AD9361 сразу предусматривается фильтрация с изменяемой полосой от 200 кГц до 56 МГц, под спектр входного сигнала. В этом случае ошибка, связанная с дискретизацией при высокой скорости передачи информации в 50 Мбит/сек сглаживается при фильтрации за счёт увеличения количества тактов приходящийся на один символ информации, но не удаляется. Это приводит к искажению сигнала, что влечёт неточность определения частоты, ухудшает работу ФАПЧ вплоть до срыва сопровождения (при малом количестве тактов на символ), а также даёт неточность в определении времени прихода сигнала, что важно для навигации. В нашей обработке сигнала в ПЛИС, который следует сразу после АЦП, эта ошибка дискретизации выявляется и удаляется на основе двух других тактов за счёт разделения на три отдельных потока по тактам. То есть в нашем случае за счёт отдельной фильтрации по каждому из трёх тактов, приходящимся на символ информации, удаётся исключить влияние ошибки дискретизации на последующие результаты по подстройке по частоте и символьной синхронизации. При подаче сигналов с демодуляторов через компараторы непосредственно на ПЛИС возможно увеличить количество тактов приходящихся на символ информации в несколько раз (в нашем случае до 6 тактов), то есть в этом случае, когда есть некоторое превышение сигнала над шумом можно обойтись бинарным сигналом, без АЦП, как это сделано в GPS (ГЛОНАСС). Как мы отмечали в [5] здесь частота генерируемая в ПЛИС выше в 2 раза, чем частота дискретизации, поступающая на АЦП, и необходима для повышения достоверности символа информации за счёт возможности допущения двух ошибок на два такта из шести приходящихся на символ. Выделение информации при скорости передачи в 41 Мбит/сек за счёт тактовой частоты в 246 МГц показано на рисунке 8.
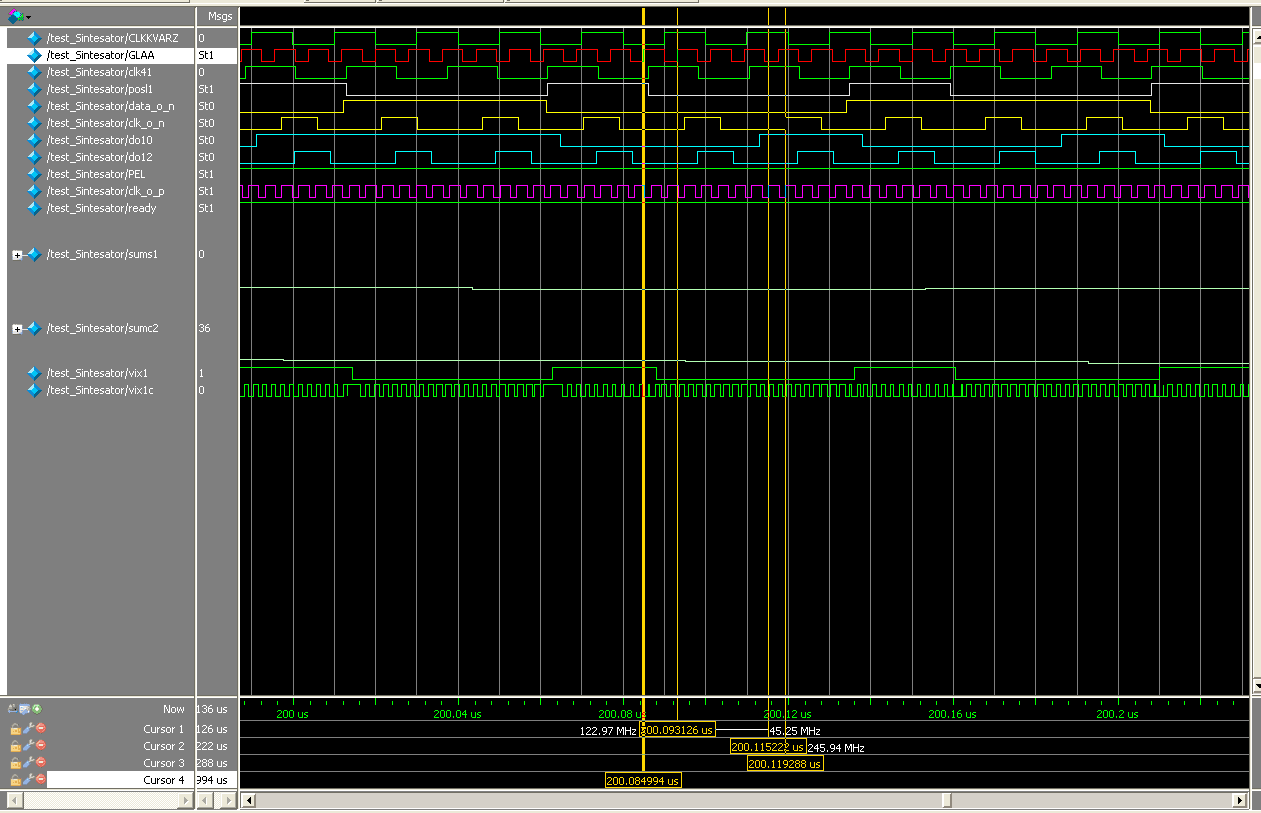
Рис. 8. Результат математического моделирования с учётом задержек в ПЛИС при выделении сигнала со скоростью передачи в 41 Мбит/сек за счёт компаратора при такте в 246 МГц и за счёт АЦП с тактом дискретизации в 123 МГц
На рисунке 8 тактовая частота в 246 МГц обозначена малиновым цветом и соответствует наименованию clk_o_p. Сигнал информации, выделенный с помощью тактовой частоты в 246 МГц имеет наименование do10, а синхронизация по количеству выделяемых бит информации осуществляется за счёт такта имеющего наименование dо12. Эти два сигнала обозначены голубым цветом. Приходящий сигнал на ПЛИС обозначен белым цветом и имеет наименование posl1. Желтым цветом обозначены сигналы информации за счёт выделения через АЦП при тактовой частоте в 123 МГц, и они имеют задержку в силу большего времени необходимого для обработки сигнала.
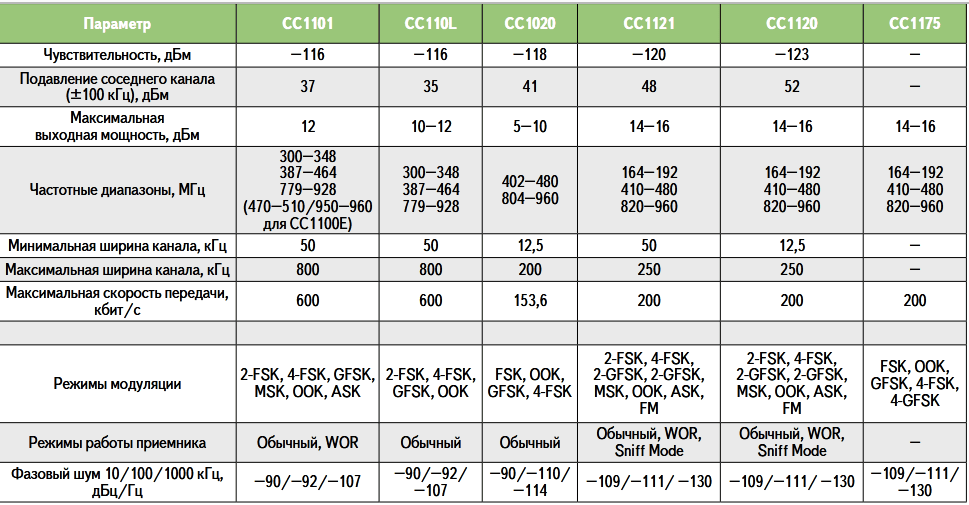
Ещё раз повторим, что это позволяет снизить влияние пиковых значений шумов, так как возможно искажение символа информации на количество тактов на единицу меньше, чем половина тактов приходящихся на символ информации. Понятно, что использование ПЛИС при наличии изменяемой программы вместо цифровых фильтров, используемых в AD9361, позволяет обеспечить более оптимальный приём с учётом конкретной модуляции приходящего сигнала. Невозможно использование данной микросхемы AD9361 и в качестве элемента АФАР, где требуется проводить суммирование сигналов от элементов АФАР по фазе на промежуточной частоте до демодуляции и оцифровки сигнала, так как сигнал в смесителях микросхемы AD9361 сразу преобразуется на нулевую промежуточную частоту. Кроме того, схема AD9361 использует смесители как переносчики частоты со сдвигом на 90 градусов по синусу и косинусу, но не обеспечивает режим работы ФАПЧ, как это делается в балансном модуляторе за счёт изменения фазы, что также необходимо в элементах АФАР как при приёме, так и при передаче. Вариант быстрой ФАПЧ с первоначальной установкой в ноль дискриминационной характеристики при замыкании цепи обратной связи также невозможен. Здесь подстройка по частоте осуществляется через изменение гетеродинной частоты с шагом в 2,4 Гц. То есть всегда есть колебания относительно 2,4 Гц, что ухудшает когерентную обработку по сравнению с ФАПЧ. Надо отметить, что наметившаяся тенденция по совместимости радиоэлектронных устройств, при работе на одной частоте за счёт кодированных сигналов, как например, это сделано в системе навигации GPS (ГЛОНАСС), делает бесполезной предварительную фильтрацию сразу после АЦП до 200 кГц, так как это исключает возможность таких узкополосных систем для работы на одной частоте с выделением за счёт разного кодирования. Как мы показали в [5] для навигации требуется точное определение смещения по частоте Доплера не более, чем 0,01 Гц, и понятно, что неточность в 2,4 Гц не позволит определять точно пройденное расстояние за счёт измерения смещения по частоте Доплера. Таким образом, специализированная микросхема AD9361 может найти применение только для частных случаев без автономного использования, и она полностью исключает технические преимущества, которые предложены нами в [1-5]. Кроме того, в условиях введения санкций против нашей страны закупка таких микросхем отечественными фирмами стала невозможной. Поставка микросхем через третьи страны также прекратится по мере выявления поставщиков, так как всегда находятся люди предающие интересы своей страны за деньги. Следовательно, в условиях необходимости импорт замещения мы имеем возможность дать задание нашей промышленности по аналогичной микроминиатюризации с уменьшением энергопотребления и размеров, с учётом наших дополнительных функций. Однако, в соответствии с тем, что пока наша промышленность не способна изготовлять подобные специализированные микросхемы типа AD9361, мы стараемся выполнить аналогичные функции на основе радиоэлементов ширпотреба с добавлением функций и улучшением характеристик по чувствительности и мощности с конструктивным исполнением в пределах размеров смартфона. В нашем случае мы опираемся на зарубежную радио элементную базу 10-20 летней давности в виде прототипов с возможной заменой аналогичными отечественными радиоэлементами. Такие радиоэлементы наша промышленность может изготавливать уже сейчас. Соответственно, чтобы решить поставленные задачи по конструктивному исполнению в пределах размера смартфона можно на первом этапе испытаний пойти на упрощения, но с сохранением функций. Так, например, учитывая, что мы используем сигнал QAM с изменением по амплитуде в 2 раза (большая градация приводит только к росту потерь несоизмеримых с выигрышем за счёт сужения полосы пропускания), то можно обойтись без дополнительного ЦАП, с использованием подачи сигналов на I и Q входы балансного модулятора (устройство 14) непосредственно от ПЛИС. Для изменения по амплитуде в 2 раза (режим QAM) можно использовать ключевую схему с применением делителя по напряжению на 2 для сигналов I и Q. В итоге мы получим необходимую передачу информации в 114-150 Мбит/сек от балансного модулятора (устройство 14), без использования дополнительного ЦАП с уменьшением энергопотребления. Сигналы информации на балансный модулятор (устройство 14) поступают от ПЛИС и обозначены на рисунке 5 стрелочкой голубого цвета. Для реализации беспроводной связи в режиме дуплекс на балансный модулятор (устройство 14) в качестве сигнала несущей частоты менее 1 ГГц подаётся сигнал в 550 МГц от синтезатора частоты с делением по частоте на 4 (устройство 11). Этот сигнал обозначен стрелочкой малинового цвета. Далее стоит проблема усиления сигнала до уровня необходимого для ретрансляции. Поэтому сигнал от балансного модулятора (устройство 14) с информацией на частоте в 550 МГц поступает на предусилитель (устройство 7). Это отмечено стрелочкой ярко-коричневого цвета на рисунке 5. Для двойного использования в режиме передачи на частоте менее 1 ГГц и более 1 ГГц желательно использовать широкополосные характеристики предусилителя (устройство 7). В нашем случае он может быть выполнен на усилителе AD8354, диапазон частот от 1 МГц до 2,7 ГГц при усилении в 20 дБ, питании 3 В и токе 23 мА. После усилителя AD8354 используется либо усилитель HMC374, диапазон частот от 0,3-3 ГГц при усилении от 9 дБ до 15 дБ, выходной мощности до 22 дБм, питании в 5 В и токе 90 мА, либо усилитель MAALSS0012 с диапазоном частот от 0,2-3 ГГц при усилении в 10-13 дБ и выходной мощностью в 18 дБм при питании 3 В (21 дБм при 5 В) с током потребления в 50 мА. Как видно из таблицы 1 для микросхем беспроводной связи с несущей частотой менее 1 ГГц [6] указанная мощность превышает необходимую в 10 дБ, однако полоса пропускания у нас при передаче 41 Мбит/сек больше на 18 дБ (в сравнении с передачей в 0,6 Мбит/сек по таблице 1), что снижает чувствительность. В итоге дальность связи сокращается в 2,5 раза при скорости передачи информации в 41 Мбит/сек. Однако при скорости передачи в 6,8 Мбит/сек мы имеем аналогичные характеристики по дальности с выигрышем в скорости передачи информации в 10 раз.
Таблица 1
Характеристики микросхем для устройств беспроводной связи на несущих частотах менее 1 ГГц
С устройства 7 усиленный сигнал с информацией на частоте 550 МГц поступает на СВЧ вход-выход, к которому может подсоединяться приёмо-передающая дополнительная антенна в диапазоне частот менее 1 ГГц. Как отмечено выше, к этому входу-выходу также может подключаться и сумматор для реализации АФАР модульной сборки на основе предлагаемых радио-модулей. Понятно, что скорость передачи в 114-150 Мбит/сек (режим QAM) необходима в случае передачи цифрового видеоизображения с высоким разрешением, что видно из таблицы 2 [7].
Таблица 2
Стандарты по скорости передачи информации от БПЛА при высоком разрешении
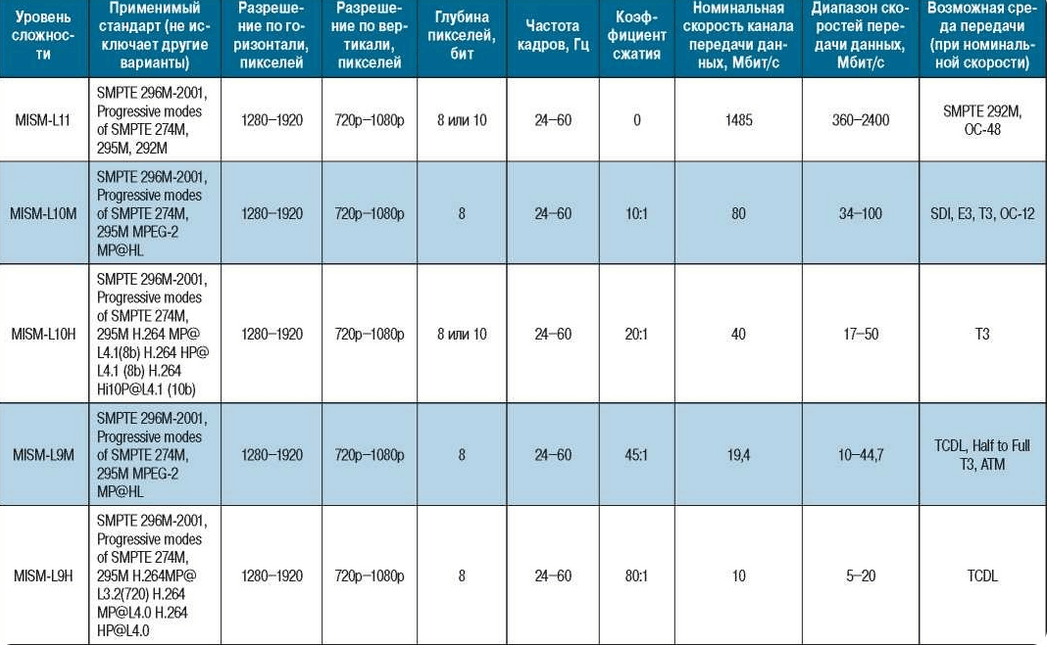
Из таблицы 2, мы видим, что предлагаемое устройство радио-модуля БПЛА обеспечивает уровень сложности по стандарту MISM-L10M со скоростью передачи данных в 114-150 Мбит/сек и сжатием 10:1, и лучше только вариант MISM-L11 со скоростью передачи данных в 1,485 Гбит/сек без сжатия. Понятно, что вариант MISM-L11 с такой скоростью передачи данных, возможно реализовать только на основе АФАР с разделением по частоте. Оценим дальность передачи информации с необходимой полосой пропускания в 50 МГц на частоте менее 1 ГГц, при следующих исходных данных.
Исходя из приведённого выше описания работы функциональной схемы по рисунку 5, несущая частота fи =550 МГц (длина волны  ). Мощность передатчика Pбпла=0,1585 Вт (22 дБм). Коэффициенты усиления антенн приёмника и передатчика выберем равными Gпрд=Gпрм=0,5 (-3дБ), что аналогично коэффициенту усиления антенн мобильных устройств связи типа Iridium. Выбираем отношение сигнал/шум q=27 (вероятность ошибки для ФКМ сигнала 10-7 [8]), при шумовой температуре Тш=600 К, соответственно в формуле k – постоянная Больцмана. Если дальность D=2,5 км, то полоса пропускания вычисляется по формуле:
). Мощность передатчика Pбпла=0,1585 Вт (22 дБм). Коэффициенты усиления антенн приёмника и передатчика выберем равными Gпрд=Gпрм=0,5 (-3дБ), что аналогично коэффициенту усиления антенн мобильных устройств связи типа Iridium. Выбираем отношение сигнал/шум q=27 (вероятность ошибки для ФКМ сигнала 10-7 [8]), при шумовой температуре Тш=600 К, соответственно в формуле k – постоянная Больцмана. Если дальность D=2,5 км, то полоса пропускания вычисляется по формуле:
 (1)
(1)

Таким образом, предлагаемое устройство, без дополнительного усилителя мощности может обеспечивать передачу видеоизображения на несущей частоте менее 1 ГГц на дальности в 2,5 км, при информации по BPSK 38-41 Мбит/сек, или на дальности в 1,4 км при информации по QAM 114-123 Мбит/сек. Такой способ передачи изображения может быть полезен в целях разведки, когда радио-модуль находящийся в определённой точке по команде начинает осуществлять обзор местности, при этом оператор находится в совершенно другом месте.
Соответственно теперь необходимо рассмотреть приём сигнала информации на частоте менее 1 ГГц, а также возможного режима ретрансляции, но на частоте выше 1 ГГц. Сама схема приёма сигнала на частоте ниже 1 ГГц и ретрансляции этого сигнала на частоте выше 1 ГГц отображена на рисунке 9.
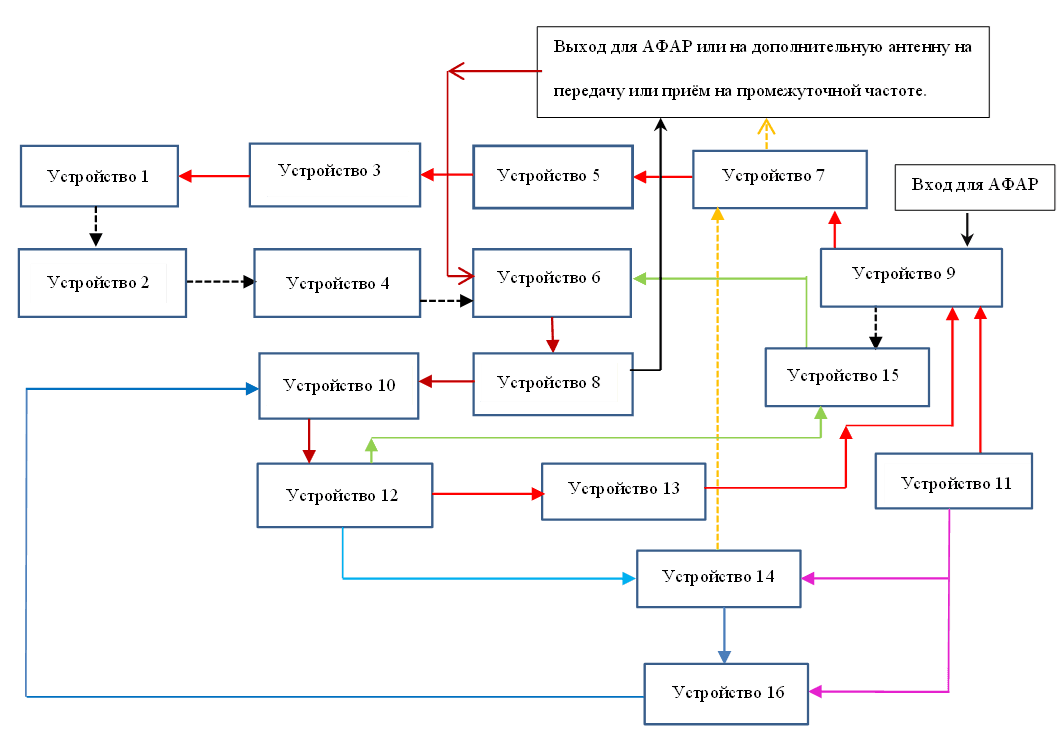
Рис. 9. Функциональная схема предлагаемого радио-модуля БПЛА при дуплексной связи с показом передачи на частоте выше 1 ГГц и его приёмом на частоте менее 1 ГГц в режиме дуплекса
В этом случае сигнал информации на несущей частоте, например, 550 МГц поступает на дополнительную антенну и далее на устройство 6 которое состоит из МШУ (например, MAAL-007304 имеет диапазон частот от 0,5 ГГц до 3 ГГц) и смесителя (может использоваться TQ5M31 с диапазоном частот от 0,5 ГГц до 2,5 ГГц или UPC2758TB). На гетеродинный вход смесителя в устройстве 6 через ключ (устройство 15) поступает сигнал, генерируемый в ПЛИС (устройство 12) на частоте в 246 МГц (возможно использование фильтра на выходе ПЛИС). Как было отмечено выше эта частота используется в ПЛИС для улучшения достоверности информации приходящейся на один символ, за счёт увеличения количества тактов в символе с 3-х до 6-ти. Перенесённый сигнал информации с частоты 550 МГц на промежуточную частоту в 304 МГц в устройстве 8 после усиления фильтруется и ещё раз усиливается в логарифмическом усилителе, который имеет усиление до 100 дБ. Полученный сигнал поступает на демодуляторы (устройство 10) с переносом информационного сигнала на нулевую промежуточную частоту с наличием сигнала в квадратуре по синусу и косинусу. При этом гетеродинный сигнал для получения сигналов в квадратуре по синусу и косинусу формируется от синтезатора частоты от несущей в 304 МГц×8=2432 МГц с делением основной частоты синтезатора на четыре (устройство 11) и в устройстве 10 с делением на два сигнала в противофазе с частотой 304 МГц.
Однако принимаемый сигнал может иметь рассогласование по частоте с гетеродинными сигналами. Поэтому. для обеспечения подстройки по частоте сигнал формирующий гетеродинные сигналы на демодуляторы с устройства 11 (малиновая стрелка) поступает не сразу на устройство 10, а на балансный модулятор (устройство 14). С ПЛИС (устройство 12) поступают сигналы соответствующие значению смещению по частоте. Надо отметить, что в случае несущей частоты в 550 МГц смещение по частоте Доплера будет незначительно и при скорости БПЛА в 250 км/ч (69,45 м/сек) вычисляется по формуле:
 (2)
(2)
Эта величина требует длительного времени подстройки, поэтому основное смещение по частоте Доплера для ФАПЧ желательно делать на основе дополнительно вносимой разницы частот между синтезаторами частот передающего устройства и принимающего устройства. Понятно, что чем больше разность частот от синтезаторов, тем быстрее обеспечивается подстройка, так как реакция на рассогласование определяется временным интервалом дискриминационной характеристики. Если исходить из обеспечения эквивалентности по дальности действия предлагаемого устройства с известными микросхемами по беспроводной связи, то при скорости передачи информации в 38 Мбит/сек, будем считать, что выделение частоты смещения между синтезаторами возможно для разницы частот в 25 кГц. При этом полоса пропускания для дискриминационной характеристики для ФАПЧ будет соответствовать величине в 100 кГц как показано на рисунке 10.
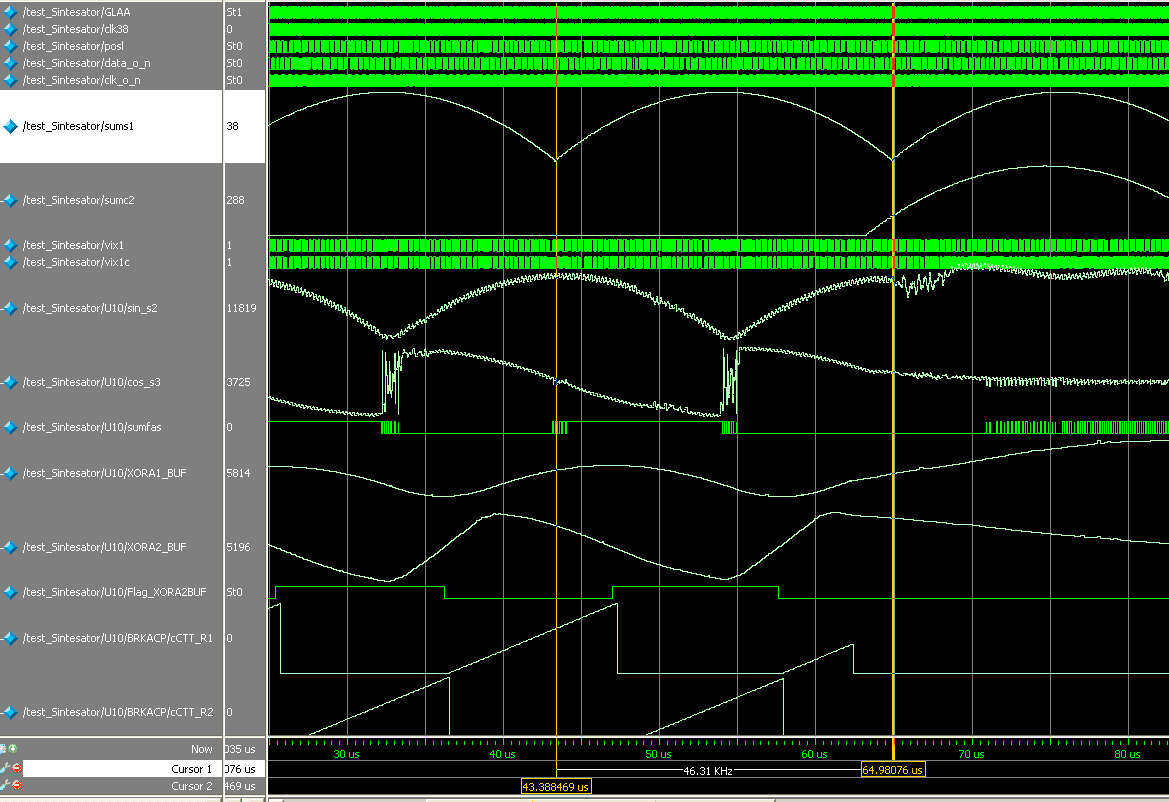
Рис. 10. Вариант подстройки по ФКМ сигналу при скорости передачи в 38 Мбит/сек и смещению по частоте Доплера в 23 кГц
Здесь дискриминационная характеристика после цифровой фильтрации обозначена как XORA2_BUF. Соответственно, сужение полосы при цифровой фильтрации внутри ПЛИС для выделения частоты смещения будет обеспечивать в этом случае отношение сигнал/шум в 380 раз выше, чем для сигнала информации в 38 Мбит/сек. Так как само смещение по частоте Доплера имеет значение всего 0,22 кГц, а отношение сигнал/шум в 380 раз выше, чем это необходимо для приёма самой информации, то ФАПЧ будет обеспечивать когерентную обработку сигнала с минимальным рассогласованием по фазе, обычно не более 1-3 градусов. Формирование сигналов в квадратуре для получения необходимого смещения по частоте происходит по программе в ПЛИС, и так как частота в 2432/4=608 МГц выше частоты в 304 МГц в 2 раза, то сигналы в квадратуре, поступающие на балансный модулятор (устройство 14) от ПЛИС (устройство 12) на рисунке 9, также должны обеспечивать частоту смещения выше тоже в 2 раза (в данном случае порядка 50 кГц). Пределы изменения смещения по частоте Доплера (0,22 кГц) практически в 100 раз меньше смещения сигналов от синтезаторов частот передающего и принимающего устройства (25 кГц), что исключает возможность захвата слежения по гармоникам из-за того, что с выхода ПЛИС на балансный модулятор (устройство 14) поступают сигналы в квадратуре в бинарном виде (голубая стрелка). Надо отметить, что программа, заложенная в ПЛИС на микросхеме A3PE3000L способна отслеживать смещение по частоте Доплера фактически до 200 кГц, а это означает что влияние гармоник, практически сведено к нулю. Для примера на рисунке 11 показана работа ФАПЧ для подстройки при смещении по частоте Доплера на 75 кГц. В этом случае частота сигналов от ПЛИС в квадратуре поступающих на балансный модулятор (устройство 14) составляет 150 кГц, а вторая гармоника будет уже 300 кГц и вполне может быть отфильтрована.
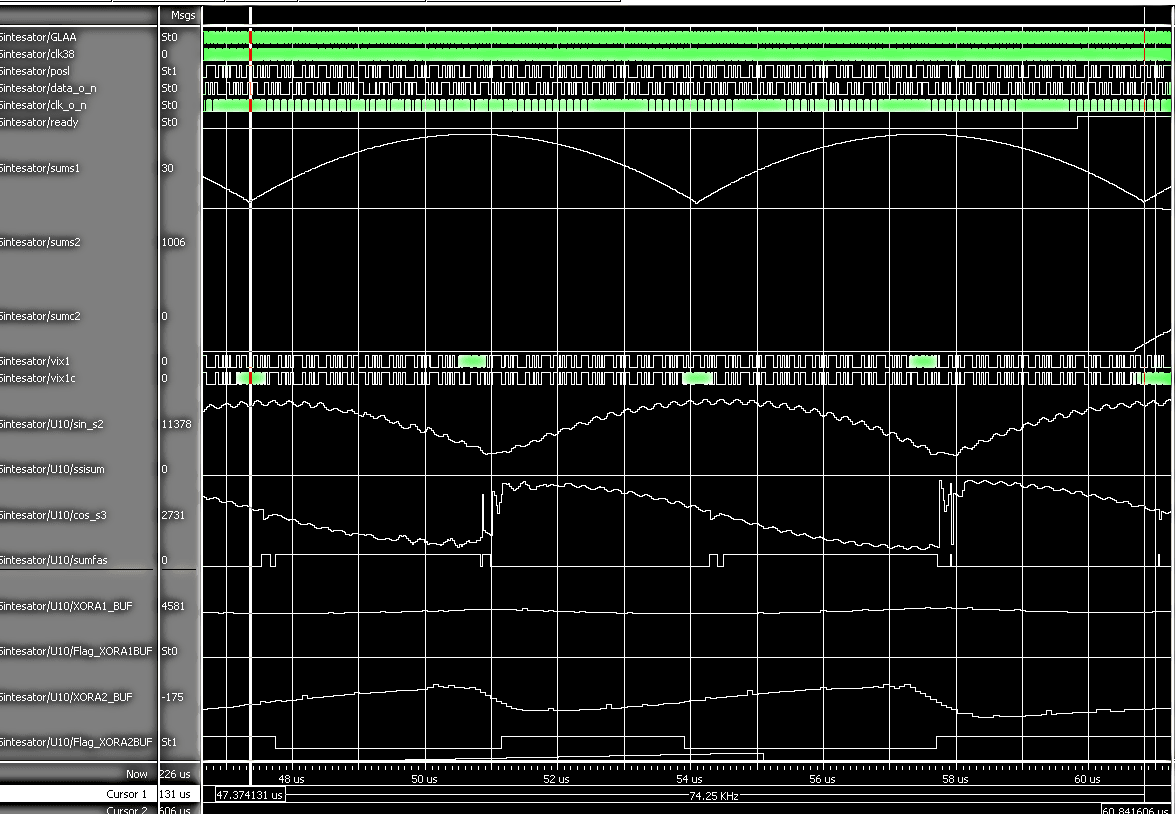
Рис. 11. Результаты математического моделирования при частоте Доплера 75 кГц при потоке информации 38 Мбит/сек
Для передачи в режиме ретрансляции, выделяемый сигнал информации в ПЛИС (устройство 12) на рисунке 9 проходящий через дополнительную антенну менее 1 ГГц, после обработки поступает на ЦАП (устройство 13) и далее на балансный модулятор (устройство 9). На гетеродинный вход этого балансного модулятора с синтезатора частоты (устройство 11) поступает сигнал несущей частоты выше 1 ГГц (в данном случае 2432 МГц). И далее сигнал информации на несущей частоте выше 1 ГГц поступает на предусилитель (устройство 7). С предусилителя (устройство 7) сигнал поступает на устройство 5, где происходит деление сигнала между усилителями мощности (устройство 3), которые подсоединяются к патч-антенне (устройство 1) с учётом выбора поляризации. Соответственно сигнал с патч-антенны излучается в сторону нахождения КПУ. Весь путь сигнала от ПЛИС и синтезатора частот на рисунке 9 отмечен красными стрелочками. При приёме сигнала на частоте 2432 МГц в КПУ, в качестве гетеродинной частоты используется 2161,77 МГц. В этом случае промежуточная частота будет порядка 270,22 МГц, а двойная промежуточная будет порядка 540,44 МГц. Далее в КПУ осуществляется обработка информации (в данном случае видеоизображения со скоростью передачи информации в 114-150 Мбит/сек. Надо отметить, что значение частоты от ПЛИС (Fплис) может лежать в пределах 228 МГц - 246 МГц, исходя из скорости передачи информации. Вследствие этого мы можем подобрать необходимую промежуточную частоту для излучения при ретрансляции с учётом принимаемого сигнала по рисунку 5 на несущей частоте 2475 МГц. Действительно, чтобы получить излучение на частоте в Fc=2475 МГц, при ретрансляции сигнала с информацией в 550 МГц от другого устройства надо иметь равенство (Fc-Fг)×2-Fплис=Fc/8. Отсюда имеем Fплис=240,625 МГц. Отметим, что не обязательно вводить изменение для тактовой частоты Fплис с таким же успехом можно изменять значения Fc и Fг, при Fплис=246 МГц.
Таким образом, мы можем иметь ретрансляцию сигнала, например, видеоизображения по цепочке из БПЛА со сменой частот периодически с 2475 МГц до 550 МГц вплоть до командного пункта управления (КПУ), которое находится на дальности в 400 км. При этом обработка сигнала в ПЛИС позволяет убрать шумы и помехи.
Следовательно, мы видим, что предлагаемый радио-модуль в данном конструктивном и функциональном исполнении, обеспечивает работу в автономном варианте с возможной передачей информации при модуляции QAM от 114 до 123 Мбит/сек, при данных радиоэлементах ширпотреба в режиме дуплекса. Отсюда, использование автономного варианта в режиме дуплекса обеспечивает связь по цепочке из БПЛА между первым БПЛА и КПУ с временным разделением при приёме и передаче со скважностью Q=2. При варианте только временного разделения такая скважность будет гораздо выше в силу необходимости разделения временного промежутка на цикл приёма и передачи от одного устройства, и приёма и передачи от другого устройства, с запоминанием информации в каждом из БПЛА в цепочке. Оптимальность предлагаемого функционального и конструктивного исполнения радио-модуля выражается и в том, что в автономном варианте одномоментно в режиме дуплекс не задействованы, только четыре МШУ на приём или четыре усилителя мощности (УМ) на передачу из-за скважности Q=2. В конструктивном плане добавляются лишь балансный модулятор и ключи для переключения режимов работы, что собственно может привести лишь к незначительному увеличению размеров радио-модуля, при этом обеспечивается многофункциональность. Понятно, что исполнение в виде микросхемы всего промежуточного тракта позволит сократить как габаритные размеры, так и энергопотребление с расширением полосы пропускания, как это получилось в микросхеме AD9361.
