
В соответствии с [1, 2, 3, 4] мы установили оптимальные радиотехнические параметры для радио-модуля БПЛА и первичные возможные функциональные схемы с учётом использования в широком диапазоне частот для радиоуправления, радиосвязи и навигации с определением максимума по скрытности передаваемого сигнала для средств радиотехнической разведки (РТР). При этом, максимальная скорость передачи информации в режиме BPSK была определена в 38-50 Мбит/сек, в режиме QPSK в 76-100 Мбит/сек, а в режиме QAM в 114 -150 Мбит/сек. Тактовая частота дискретизации должна быть от 114 до 150 МГц, что связано с необходимостью наличия 3 тактов на символ с целью исключения ошибки дискретизации при выполнении теоремы Котельникова. Аналого-цифровой преобразователь (АЦП) должен иметь разрядность в 13-14 бит для повышения точности определения смещения частоты Доплера, и времени прихода сигналов для навигации за счёт использования сплайнов. Кроме того, мы показали возможность размещения радиоэлементов для узлов БПЛА на платах при наличии размеров не более, чем у аналогов и прототипов, и привели первичные соответствующие функциональные схемы. Далее в [5, 6] мы рассмотрели оптимизацию радио-модуля БПЛА на основе выбора конкретной функциональной схемы и конструктивного размещения радиоэлементов с учётом многофункциональности и ширпотреба, так как это позволяет значительно сократить издержки по изготовлению и быстро осуществить экспериментальную проверку режимов работы. При этом оптимизация проведена с учётом сравнения с существующими аналогами и прототипами. Помимо функции БПЛА по наведению на цель, по оптическому изображению при идентификации по подобию образа, или через командную радиолинию от командного пункта управления (КПУ), стоит вопрос определения местоположения КПУ противника или источника помех по радиосигналу с целью их уничтожения. При использовании одного БПЛА для решения этой проблемы следует использовать активную фазированную антенную решётку (АФАР), которая путём сканирования по углам диаграммы направленности (ДН) антенны позволяет осуществлять обзор окружающего пространства и формировать пеленгационную характеристику. Тем самым обеспечивается определение местоположения с наведением на источник излучения. Понятно, что коэффициент усиления антенны БПЛА в этом случае должен быть достаточным, чтобы по уровню мощности приходящего сигнала выделить его из шумов на заданном расстоянии. Однако диапазон частот КПУ противника для управления БПЛА может быть от сотен мегагерц до десятка гигагерц. Это подразумевает разбиение всего предполагаемого диапазона частот на литеры по несущей частоте под полосу пропускания АФАР. При этом, чем больше площадь АФАР, тем выше коэффициент усиления антенны и соответственно селективные возможности по выделению местоположения радиосигнала противника. Однако площадь АФАР ограничивается размерами БПЛА и наличием места расположения. Кроме того, желательно обеспечить такое отдельное исполнение платы АФАР в широком диапазоне частот, которое позволяло бы обеспечить простое технологическое исполнение с быстрой заменой для сокращения расходов. При расчётах возможного диапазона АФАР для БПЛА будем исходить из известных аналогов и прототипов, что при сравнении покажет преимущество предлагаемого решения. Так в диапазоне до 1 ГГц для связи GSM900 используется антенна Тракт Х800 (рисунок 1).
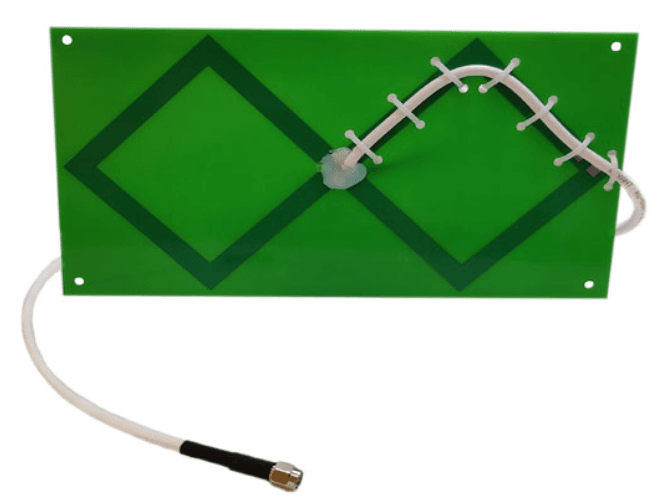
Рис. 1. Вид антенны Тракт Х800
Ниже в таблице 1 приведены параметры такой антенны.
Таблица 1
Параметры антенны Тракт Х800
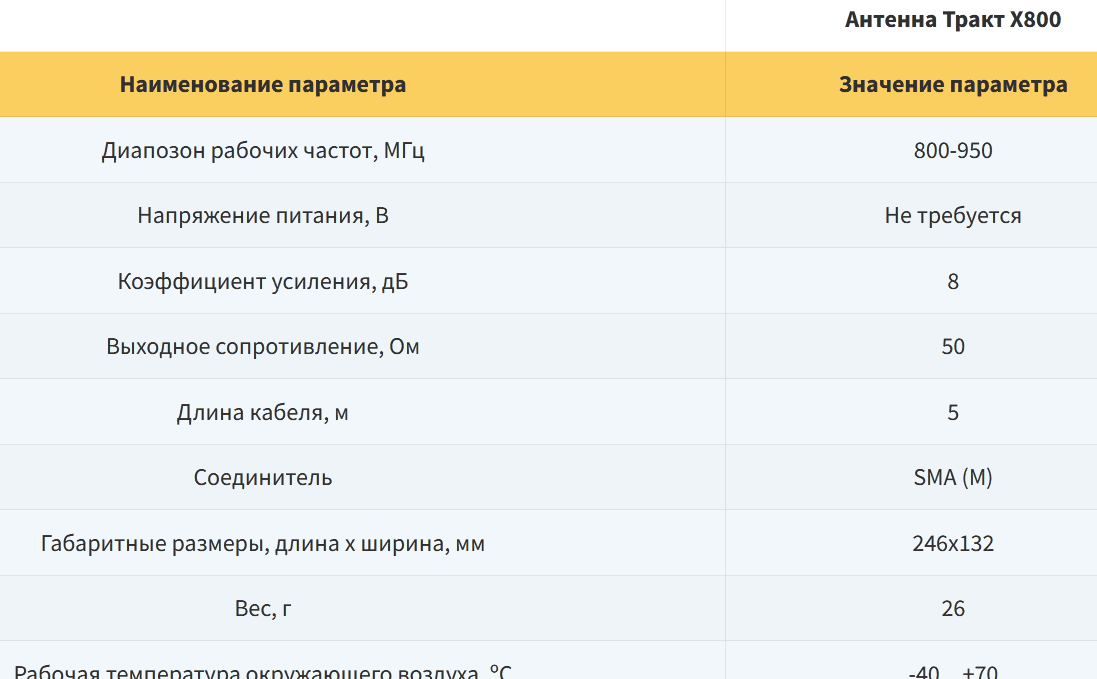
Из технических характеристик следует, что стороны квадрата патч антенны Тракт Х800 не имеют одинаковых размеров. Подводка возбуждения сигналом (противофазная для патч антенны Тракт Х800) с угла патч говорит о наличии круговой поляризации. Собственно это стандартный вариант получения круговой поляризации по рисунку 2 [7].
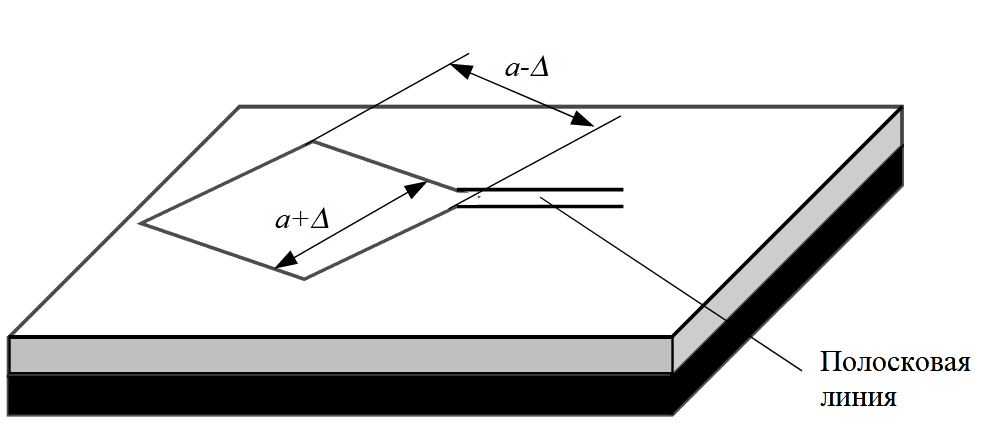
Рис. 2. Патч с круговой поляризацией
Следует отметить, что для средней несущей частоты в 875 МГц, размер стороны квадрата одного патч должен быть, при наличии воздушного зазора с металлической поверхностью («землёй»), порядка λ/2=с/(2×f)=(3×108м/с)/(2×0,875×109Гц)=17,14 см.
Так как размеры по диагонали патч антенны Тракт Х800 меньше этой величины, то это говорит о применении диэлектрического наполнителя в зазоре между патч и металлической поверхностью. Учитывая диагональ в (12,3 см+13,2 см)/2 =12,75 см для патч антенны Тракт Х800 мы можем приблизительно вычислить сокращение размеров за счёт диэлектрического наполнителя с учётом стороны квадрата патч 9,015 см за счёт деления размера гипотенузы на 21/2. То есть, сторона квадрата патч с учётом диэлектрического наполнителя меньше стороны квадрата в 17,14 см для несущей частоты 875 МГц при воздушном зазоре в 1,9 раза.
Понятно, что для использования АФАР на основе антенны Тракт Х800 как одного элемента потребуется как минимум четыре таких антенны для управления лучом. В этом случае размеры будут не менее 59,2 см × 26,4 см, и общий коэффициент усиления составит 14 дБ (8дБ+6дБ).
АФАР на основе Тракт Х800 размерами 59,2 см × 26,4 см может прикрепляться только на боковые поверхности БПЛА вертолётного типа БАС 200 (рисунок 3).

Рис. 3. БПЛА БАС 200
При этом БПЛА имеет следующие характеристики:
1. Технические характеристики:
- Экипаж: 2 человека (внешний экипаж);
- Грузоподъёмность: 35 кг (сертификационная), 50 кг (тестовая);
- Длина: 3,9 м;
- Высота: 1,2 м;
- Максимальная взлётная масса: 185 кг (сертификационная), 200 кг (тестовая);
- Масса топлива во внутренних баках: 44 кг (55 л бензина);
- Силовая установка: 1 × роторно-поршневой IAE50R-AA (англ.) рус.;
- Мощность двигателей: 1 × 37,3 кВт (51 л. с.) при 7750 об/мин.
2. Лётные характеристики:
- Максимально допустимая скорость: 130 км/ч (на высоте 2 км);
- Максимальная скорость: расчётная 160 км/ч;
- Практическая дальность: 400 км (при управлении по цепочке станций), макс. удалённость от ПУ 27 км (сертификационная), 80 км (тестовая);
- Практический потолок: 3500 м;
- Статический потолок: 2000 м.
Так как АФАР из 4-х элементов Тракт Х800 можно установить только сбоку на БПЛА БАС 200, то в этом случае БПЛА должен периодически разворачиваться боком к источнику излучения радиосигнала противника.
Аналогично можно установить такую АФАР на БПЛА типа Орлан-10 (рисунок 4) с той же необходимостью периодически разворачиваться боком к источнику излучения, то есть использовать режим барражирования по местности вдоль линии соприкосновения.
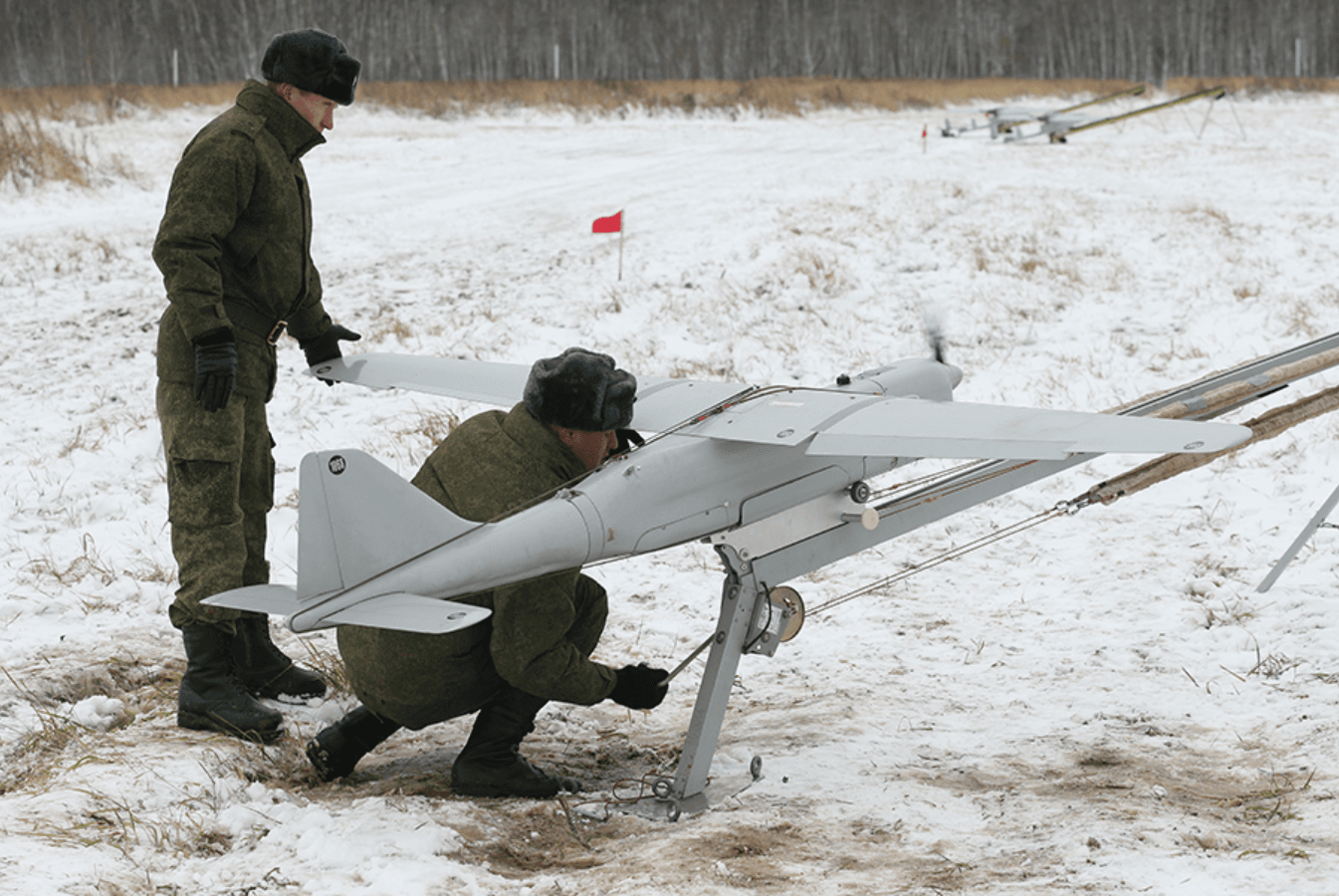
Рис. 4. БПЛА Орлан-10
Лётно-технические характеристики Орлан-10.
Основные характеристики:
- Взлётная масса – 14 кг
- Масса полезной нагрузки – до 5 кг
- Двигатель – ДВС (бензин А-95)
- Способ старта – с разборной катапульты
- Способ посадки – на парашюте
- Воздушная скорость – 90-150 км/ч
- Макс. продолжительность полёта – 16 ч
- Макс. дальность применения комплекса – до 120 км от наземной станции управления (до 600 км в автономном режиме)
- Макс. высота полёта над уровнем моря – 5000 м
- Макс. допустимая скорость ветра на старте – 10 м/с
- Диапазон рабочих температур у поверхности земли от −30 до +40°C
Модификация – Орлан-10
Размах крыла, м – 3,10
Длина, м – 1,80
Высота корпуса БПЛА, порядка 0,25 - 0,28 м
Масса, кг:
- пустого – 12,5
- максимальная взлётная – 18
Тип двигателя – 1 ДВС
Мощность, л. с. – 1 х
Крейсерская скорость, км/ч – 100–150
Практическая дальность, км – 600
Радиус действия, км – 50-120
Продолжительность полета, ч – 10-18
Практический потолок, м – 6000
Понятно, что антенна типа Тракт Х800 не является оптимальной для использования в качестве АФАР для определения местоположения радиосигнала от противника, так как желательно обеспечить управление по фазе для каждого патч АФАР, что позволяет принимать любую поляризацию с отклонением луча ±60°.
Например, в случае АФАР этого диапазона частот на 8 патч (с другим расположением и возбуждением патч) с размещением приёмопередающих плат, подводкой шлейфов для радиосигналов к каждой патч, будем иметь вид, показанный на рисунке 5.
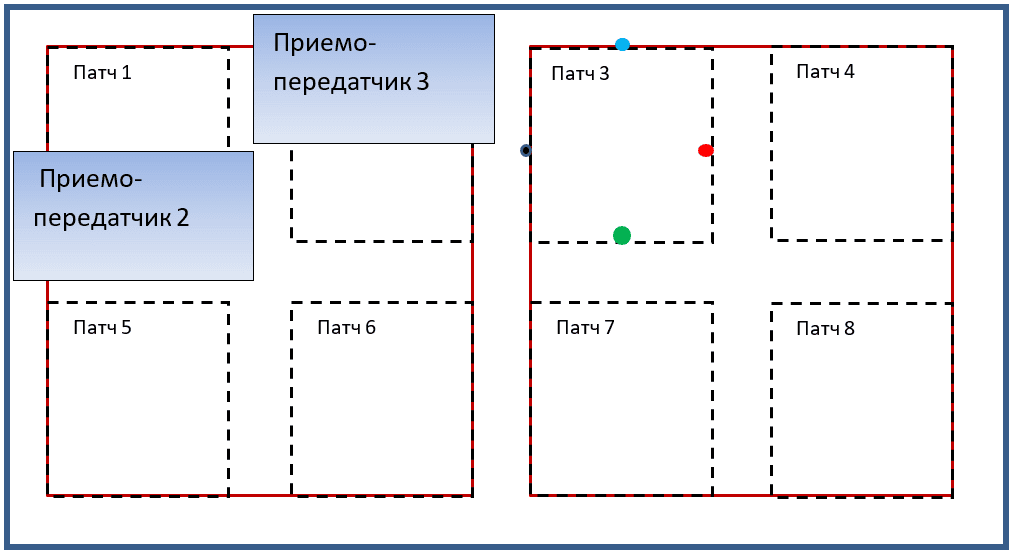
Рис. 5. АФАР на 8 патч
При этом при том же диэлектрике в зазоре для АФАР из 8 патч мы с учётом стороны квадрата патч 9,015 см будем иметь размеры 37,3 см×18,66 см, вместо 59,2 см × 26,4 см при использовании антенны Тракт Х800. Однако для сокращения расходов, при этом желательно использовать унифицированные радио-модули, например, нашей конструкции [5, 6], которые можно использовать не только в данном диапазоне частот. При этом размер плат нашего радио-модуля составляет 13,5 см×7 см (без учёта возможности дальнейшей микроминиатюризации). В этом случае при использовании на патч (диапазон от 522 МГц до 1142,5 МГц) до двух приёмопередатчиков для обеспечения любой поляризации мы будем иметь для АФАР из 8 патч размер 56 см × 28 см. Однако, можно использовать АФАР с двумя патч, что отмечено на рисунке 5 коричневым цветом, по аналогии с вариантом антенны Тракт Х800. Здесь возможна работа в диапазоне уже от 250 МГц до 500 МГц при соответствующем диэлектрике в воздушном зазоре между патч и металлической поверхностью. Это может быть необходимо не только для связи и радиоуправления от КПУ, но например, для обнаружения радиосигнала противника и выявления его местоположения с помощью нескольких БПЛА, что будет показано несколько ниже.
Понятно, что при широком диапазоне частот нам потребуется соответствующий диэлектрик дающий эквивалент в увеличении размеров патч. Так, для средней частоты в 875 МГц требуется увеличение размеров для нашего случая с 14 см до 17, 14 см, то есть в 1,22 раза вместо 1,9 раза как для антенны Тракт Х800 со стороной квадрата 9,015 см. Это соответственно ведёт к увеличению коэффициента усиления антенны с 14 дБ до 15,9 дБ, за счёт уменьшения плотности диэлектрика, который даёт потери. Надо отметить, что при воздушном зазоре антенна из 4-х патч может иметь коэффициент усиления в 14,5 дБ с КСВ<1,2 [8], а из восьми патч соответственно не менее 17 дБ. Понятно, что в нашем случае при отсутствии диэлектрика размеры патч будут иметь размеры сторон в 14 см и соответствовать средней частоте 1067,5 МГц с работой в полосе от 992,5 МГц до 1142,5 МГц при полосе пропускания антенны в 150 МГц как у антенны Тракт Х800. Однако, вставляя или убирая диэлектрик различного типа (или заполнения) мы можем увеличивать диапазон работы АФАР с понижением несущей частоты, в данном случае при вставке в зазор диэлектрика антенны Тракт Х800 мы можем расширить диапазон данного варианта АФАР (патч со стороной в 14 см) с понижением частоты до 522 МГц. В итоге, общий диапазон работы антенны, за счёт изменения диэлектрика в воздушном зазоре АФАР, составит от 522 МГц до 1142,5 МГц. Это позволяет снизить литерное деление антенн. Отметим, что балансный модулятор AD8346 может работать в диапазоне от 0,8 ГГц до 2,5 ГГц, это обеспечивает возможность его применения в качестве формирователя гетеродинной частоты для диапазона от 0,5 ГГц до 2,8 ГГц при смещении радиосигнала на промежуточную частоту порядка 300 МГц. Если использовать совместимый по контактам балансный модулятор AD8349 с диапазоном от 0,8 ГГц до 2,7 ГГц, то диапазон принимаемых сигналов может составить от 0,5 ГГц до 3 ГГц. Собственно это соответствует литере одного частотного диапазона такой микросхемы приёмопередатчика как AD9361. Отсюда мы видим, что ограничение по частоте связано с выбором размеров патч антенны АФАР. В данном случае на каждый патч АФАР приходится по 2 приёмо-передатчика с обеспечением любой поляризации за счёт изменения фазы. Так как АФАР состоит из многослойных печатных плат, то их изготовление и стоимость невысока, и главное – это обеспечить совмещение в местах подсоединения к радио-модулям и возможность смены диэлектрика в зазоре между патч и металлической подложкой. Вот поэтому требуется съёмная конструкция подсоединения печатной многослойной платы АФАР к радио-модулям, изготовление которой простое в технологическом плане и позволяет осуществить массовое дешёвое производство.
На рисунке 5 подсоединение элемента возбуждения волны к патч АФАР для приёма радиосигнала на вертикальную и горизонтальную поляризацию обеспечивается двумя приёмопередатчиками. Причём каждый приёмопередатчик унифицированного радио-модуля имеет по 4 малошумящих усилителя (МШУ) с расположением как показано на рисунке 6.
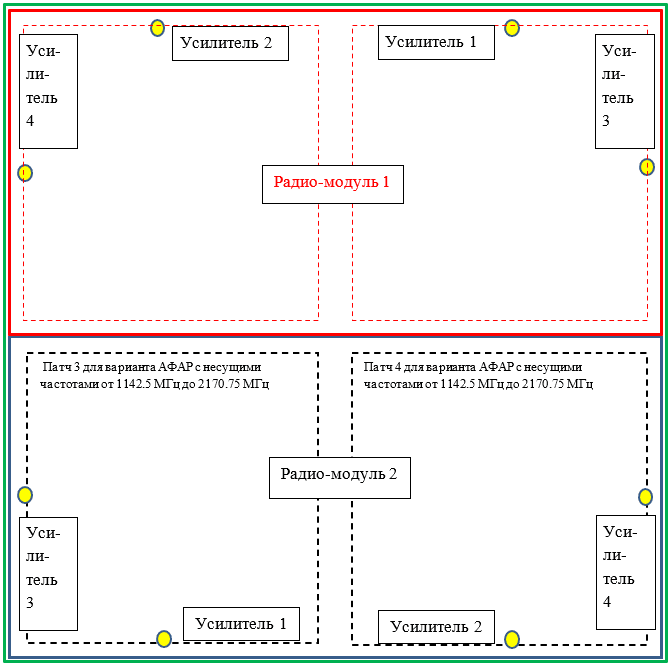
Рис. 6. Расположение усилителей на платах унифицированного радио-модуля
При работе в диапазоне 1142,5 МГц до 2170,75 МГц (4 патч на 2 радио-модуля) на каждый патч будет приходиться по два места подсоединения к усилителям для получения круговой поляризации (места соединений обозначены жёлтым цветом). На нижней части многослойной платы АФАР, которая является отдельным элементом общей конструкции, будут располагаться в печатном виде согласующие полосковые элементы для получения лучшего КСВ и фазового согласования.
На рисунке 6 зелёным цветом отображён патч АФАР на несущих частотах в полосе от 522 МГц до 1142,5 МГц. Понятно, что для патч такого диапазона не подходит места соединений с платами радио-модулей с патч АФАР в диапазоне 1142,5 МГц до 2170,75 МГц. Поэтому на рисунке 7 показано расположение сумматоров и делителей варианта АФАР для патч в диапазоне от 522 МГц до 1142,5 МГц, которые располагаются на соответствующем слое многослойной печатной платы и обеспечивают новые соединения с патч (обозначены чёрным, голубым, красным и зелёным цветом).
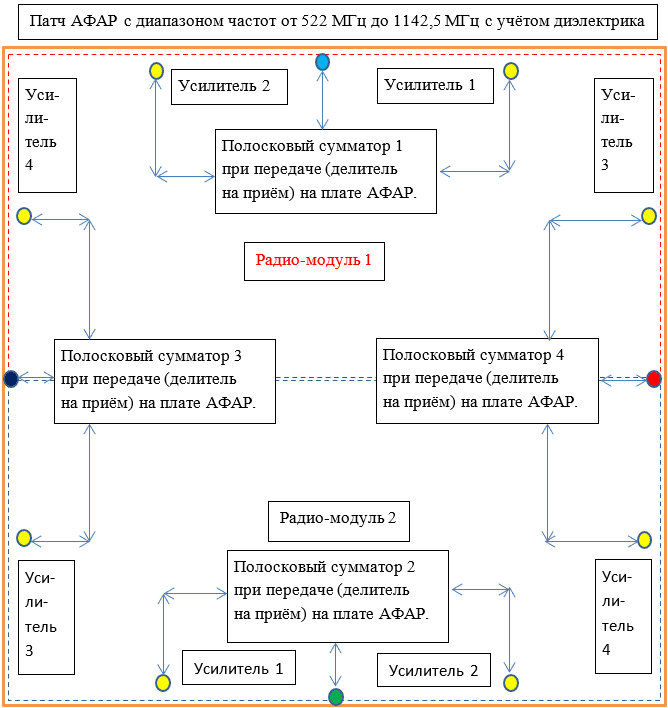
Рис. 7. Расположение радио-модулей под патч АФАР диапазона от 522 МГц до 1142,5 МГц (контур коричневого цвета). Здесь также указано расположения СВЧ разъёмов типа «защёлка» (вид такой конструкции показан несколько ниже рис.15) подсоединения к патч (кружочки зелёного, чёрного, красного и голубого цветов). Для варианта от 250 МГц -500 МГц сумматоров (делителей) на многослойной печатной плате АФАР будет больше в соответствии с новыми местами подключения к патч
Два МШУ (усилитель 1 и 2) на плате 2 первого радио-модуля через СВЧ разъёмы типа «защёлка» (кружочки жёлтого цвета) подключаются к патч (голубой цвет соединения на рисунке 7) через сумматор 1 при передаче (делитель при приёме), который находится в нижней части многослойной печатной платы АФАР. Два МШУ (тоже усилители 1 и 2) второго радио-модуля через СВЧ разъёмы типа «защёлка» (кружочки жёлтого цвета) подключаются к патч (зелёный цвет соединения на рисунке 7) через сумматор 2 при передаче (делитель при приёме), который находится в нижней части многослойной печатной платы АФАР. Далее один МШУ (усилитель 4) от первого радио-модуля и один МШУ (усилитель 3) от второго радио-модуля (имеющие одинаковую фазу) с левой стороны подключаются к патч (чёрный цвет соединения на рисунке 7) через соответствующий полосковый сумматор (делитель) 3. Оставшийся один МШУ (усилитель 3) от первого радио-модуля и МШУ (усилитель 4) от второго радио-модуля (они находятся в противофазе к МШУ подключаемым с левой стороны) также через сумматор (делитель) 4 подсоединяются к патч с правой стороны (красный цвет соединения на рисунке 7). Приём и передача МШУ или усилителей мощности (УМ) осуществляются через ключи на плате 2 (рисунок 8). При передаче и работе в качестве источника помех для усиления мощности можно использовать, например, усилитель МААМ-009286 с диапазоном от 0,25 ГГц до 4 ГГц, питанием 5 В, мощностью 27 дБм и усилением 15,5 дБ.
Расположение двух плат радио-модуля под платой АФАР, обеспечивающих приём и передачу, показано на рисунке 8.
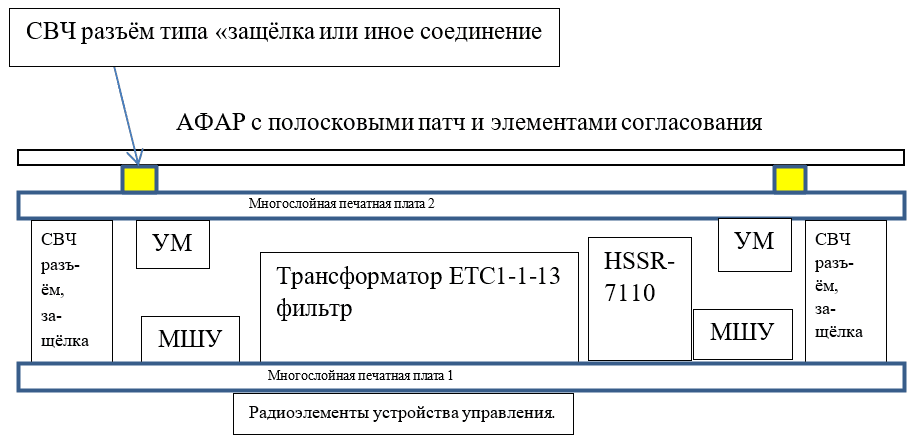
Рис. 8. Вид предлагаемой конструкции радио-модуля под патч АФАР сбоку
При этом плата 1 с радиоэлементами и ПЛИС в топологическом изображении показана на рисунке 9.
Рис. 9. Плата 1 в топологии с односторонним размещением радиоэлементов
Одновременно, плата 2 с радиоэлементами в топологии представлена на рисунке 10.
Рис. 10. Плата 2 в топологическом изображении с односторонним размещением радиоэлементов
Общий вид АФАР из 32 патч на частоты от 1142,5 МГц до 2170,75 МГц и размерами 56 см×28 см показан на рисунке 11.
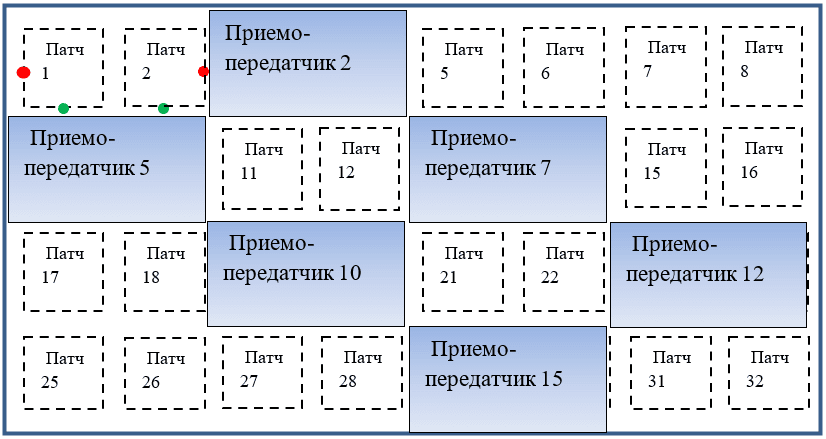
Рис. 11. АФАР из 32 патч на частоты от 1142,5 МГц до 2170,75 МГц и размерами 56 см×28 см
Для сравнения надо отметить, что в диапазоне 1142,5 МГц до 2170,75 МГц находятся навигационные сигналы таких систем навигации как GPS, ГЛОНАСС, Galileo, Beidou, а также сигнал GSM1800. Пример, навигационного помехоустойчивого приёмника размерами 130 мм х 130 мм х 22 мм, работающего в этом же диапазоне частот, показан на рисунке 12.
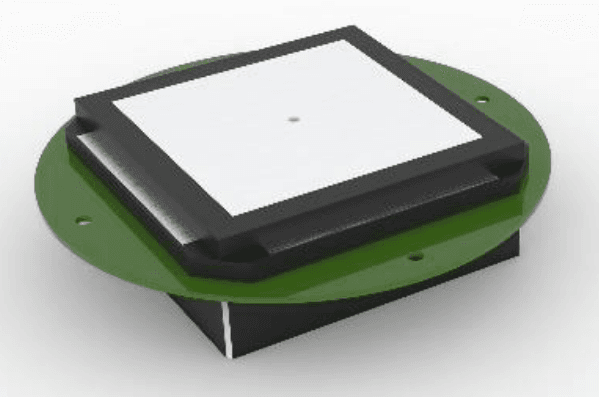
Рис. 12. Навигационный приёмник Каскад - 4М при энергопотреблении в 6 Вт, и весе 250 г
То есть, мы имеем размер патч – антенны (13 см) близкий по длине размеру предлагаемого радио-модуля (14 см). Это означает, что АФАР, на основе наших радио-модулей, может использоваться как навигационная система. Кроме того, ретранслируя навигационный сигнал, АФАР с использованием предлагаемых радио-модулей, может применяться как помеховое устройство, которое вносит неоднозначность в определение координат по местоположению. В этом случае не требуется мощная шумовая помеха, так как сам кодовый сигнал находится ниже уровня шумов приёмника.
Понятно, что нас также интересует использование радио-модулей и на более высокие частоты с учётом диэлектрика, который позволяет менять размеры в 2 раза, например в диапазоне 2,090 ГГц (патч со стороной квадрата 7,17 см) до 4,285 ГГц (патч со стороной квадрата 3,5 см). Здесь можно учитывать расширение полосы пропускания АФАР по мере увеличения несущей частоты, что снизит требование к диэлектрику по плотности, а значит и уменьшит потери. Это позволяет наиболее полно использовать возможности диапазонов радиоэлементов, так, например, синтезатор частоты ADF4350 способен работать в диапазоне от 137,5 МГц до 4400 МГц.
Для решения проблемы повышения несущих частот от 2 ГГц до 4 ГГц в АФАР с использованием унифицированных радио-модулей фиксированного размера (13,5см × 7 см) без учёта будущей микроминиатюризации радиоузлов, мы должны разбить каждый патч АФАР размером стороны квадрата 7 см на 4 патч с размерами стороны квадрата в 3,5 см с использованием шлейфового питания аналогичного с вариантом антенны [8] по рисунку 13.
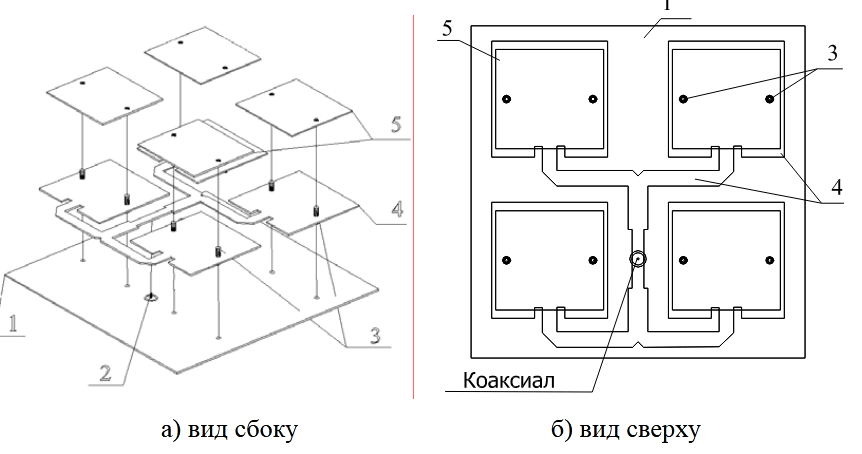
Рис. 13. Антенна АФАР из 4-х элементов с воздушным заполнением
В этом случае один радио-модуль должен обслуживать 8 патч с обеспечением вертикальной и горизонтальной поляризации как показано на рисунке 14.
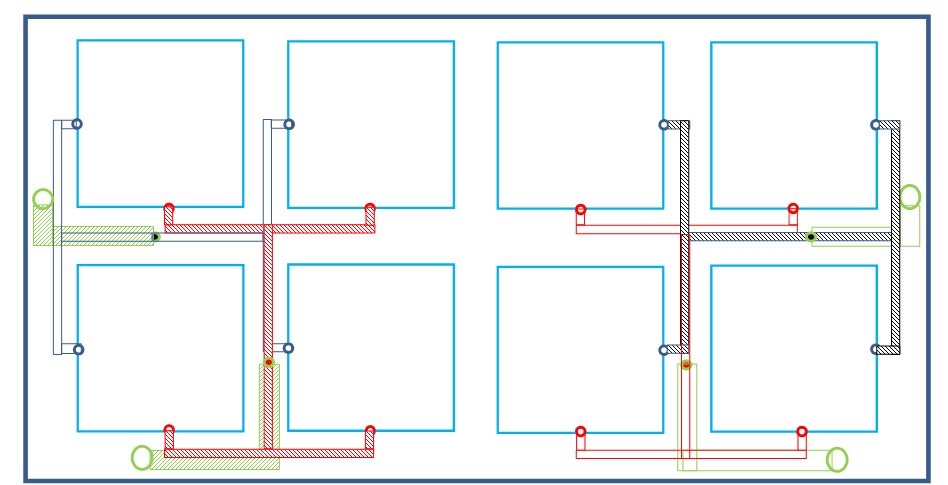
Рис. 14. Радио-модуль с размерами 13,5 см × 7 см с обслуживанием 8 патч
Здесь красным цветом отображён четвертьволновый полосковый делитель, дающий вертикальную поляризацию, и он расположен на своём слое многослойной печатной платы с подсоединением через металлизированное отверстие к верхнему слою металлической пластины патч АФАР с прохождением без контакта через металлизированный слой, отображающий «землю». На рисунке 14 это отмечено металлизированным отверстием с контуром красного цвета. Далее через металлизированное отверстие (отмечено на рисунке 14 линией окружности контура зелёного цвета с красным заполнением) идёт соединение со слоем многослойной печатной платы АФАР, в котором может быть осуществлено согласование через полосковые линии и подобрана соответствующая длина в λ/4 между точками подсоединения к патч между вертикальной и горизонтальной поляризацией. Этот слой многослойной печатной платы обозначен зелёным цветом и через металлизированное отверстие зелёного цвета осуществляется подсоединение к противоположному последнему слою с подсоединением к МШУ и УМ через плату 2 по рисунку 6, например, через СВЧ разъём типа «защёлки» который показан на рисунке 15.
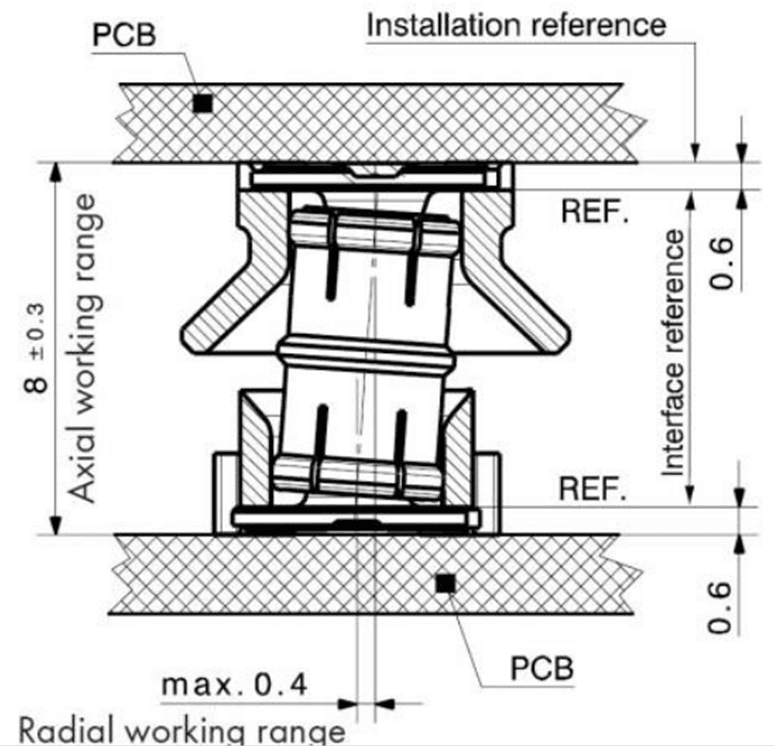
Рис. 15. СВЧ разъём типа «защёлка» с бочонком и с размерами при максимально плохом совпадении осей соединений, что и даёт расстояние между платами в 8,3 мм. При хорошем совпадении будет 6 мм
Аналогично контуром линий чёрного цвета отображён четвертьволновый полосковый делитель, дающий горизонтальную поляризацию, и он расположен на своём слое многослойной печатной платы с подсоединением через металлизированное отверстие к верхнему слою металлической пластины патч с прохождением без контакта через металлизированный слой отображающий «землю. На рисунке 14 это отмечено металлизированным отверстием с контуром черного цвета. Далее через металлизированное отверстие (отмечено на рисунке 14 линией окружности зелёного цвета с чёрным заполнением) идёт соединение со слоем многослойной печатной платы, в котором может быть осуществлено согласование через полосковые линии и подобрана соответствующая длина в λ/4 между точками подсоединения к патч между вертикальной и горизонтальной поляризацией. Этот слой многослойной печатной платы обозначен зелёным цветом и через металлизированное отверстие зелёного цвета осуществляется подсоединение к противоположному последнему слою с подсоединением к МШУ и УМ в нижней части платы через разъём типа «защёлки». Таким образом, АФАР размерами 56 см × 28 см, размещаемая на боковой поверхности БПЛА и состоящая из 128 патч, будет иметь коэффициент усиления 29 дБ (15 дБ (32 раза+14 дБ (дают 4 патч)) на частоте 4 ГГц с КСВ <1,2. Напомним, что бортовая антенная решётка «KEEL 3500» имеет диапазон в 3,4 ГГц до 3,6 ГГц с коэффициентов усиления всего в 6 дБ с КСВ <1,5. Понятно, что управление лучом АФАР в 128 патч усложняется, так как выигрыш в унификации связан с тем, что управление с изменением фазы одной величины приходится на 8 патч по вертикали и на 16 патч по горизонтали. Понятно, что при больших углах отклонения луча АФАР это ведёт к образованию многолучевого симметричного варианта, как при приёме, так и при передаче, что даёт неоднозначность в определении углового местоположения источника радиосигнала. Однако, за счёт того, что БПЛА может изменять угловой курс движения достаточно быстро, эта неоднозначность исключается. При постановке помех уже зная местоположение можно сориентировать движение БПЛА таким образом, чтобы был только один луч АФАР с получением максимальной мощности. При приёме, многолучевой случай не влияет на отношение сигнал/шум, а влияет только сокращение площади АФАР из-за угла наклона приходящего сигнала.
Понятно, что желательно обеспечить диапазон работы АФАР и до 6 ГГц. Однако с помощью унифицированных радио-модулей предлагаемой конструкции это можно обеспечить только в будущем за счёт микроминиатюризации. На данном этапе это возможно сделать на радиоэлементах ширпотреба с размещением плат параллельно патч только на основе специализированной АФАР. В АНО «НТИЦ «Техком» такой вариант специализированной АФАР был выполнен для АФАР состоящей из 16 патч на рисунке 16 при вертикальной поляризации.
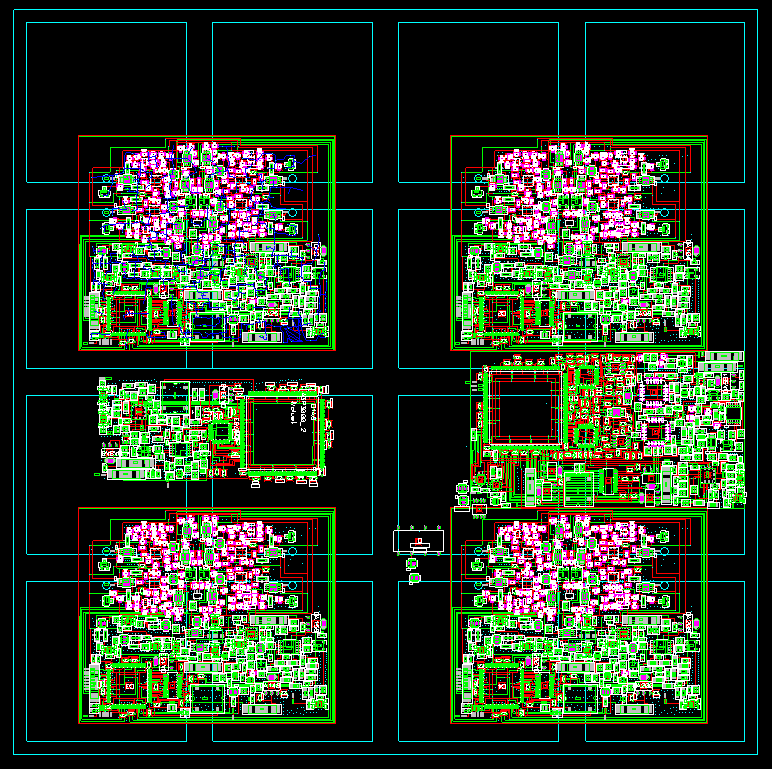
Рис. 16. Общая плата для АФАР, состоящей из 16 патч (4 патч×4 патч) и размерами 28 см×28 см
Для горизонтальной поляризации используется ещё одна плата по аналогии с рисунками 6 и 8. Данный вариант рассматривался на частоту порядка 2,14 ГГц. Для использования данной конфигурации для 4 ГГц мы должны разбить каждый патч размером стороны квадрата 7 см на 4 патч с размерами стороны квадрата в 3,5 см с использованием соединения с патч аналогичного с вариантом антенны [8] по рисункам 13 и 14. При этом как видно из рисунка 16 у нас будет запас по месту, как по вертикали, так и по горизонтали на один патч. Это позволяет уменьшить размеры в 1,5 раза. Соответственно в этом случае мы сможем обеспечить АФАР на 6 ГГц (4 ГГц×1,5) при 64 патч с размерами 18,7 см×18,7 см, которые можно разместить и в носовой части БПЛА.
Для диапазона частот выше 6 ГГц желательно использовать специализированные АФАР, так как размеры патч очень малы. При этом применяются приёмо-передающие модули аналогично тому, как это делается для щелевых антенных решёток, но со слотовым (расположение плат перпендикулярно к патч) размещением (рисунок 17).
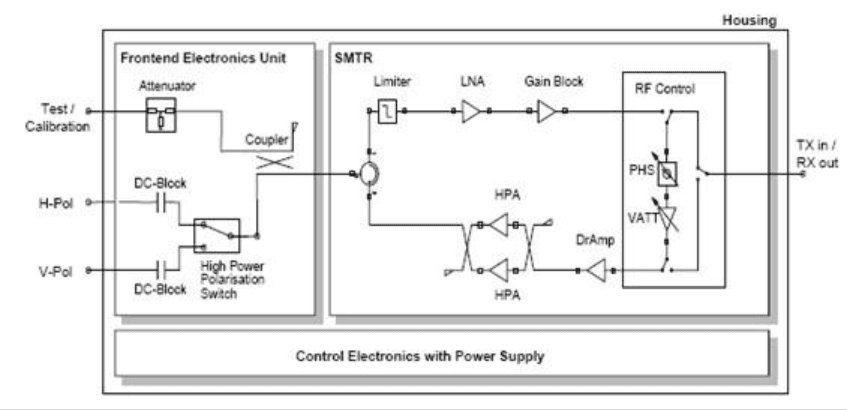
Рис. 17. Функциональная схема приёмо-передающего модуля АФАР Х-диапазона
Вид конкретного приёмо-передающего модуля показан на рисунке 18.
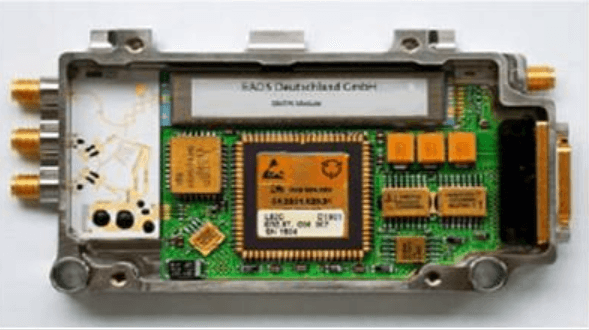
Рис. 18. Модуль СВЧ АФАР Х-диапазона
При этом АФАР на частотах выше 6 ГГц можно размещать в носовой части БПЛА.
Таким образом, использование представленных унифицированных радио-модулей без рассмотрения вариантов дальнейшей микроминиатюризации желательно применять на частотах от 0,25 ГГц до 4 ГГц при соответствующей базе радиоэлементов ширпотреба.
Теперь покажем, каким образом предлагаемые радио-модули можно использовать в режиме АФАР.
Так, при многофункциональном применении, с учётом использования режима дуплекса на разных частотах, что повышает помехозащищённость, а также возможности использования наших радио-модулей в качестве элементов АФАР была в [5] предложена функциональная схема (рисунок 19). Она в условиях выявления радиосигнала противника на частотах от 0,25 ГГц до 4 ГГц, или при постановке помех, будет функционировать следующим образом:
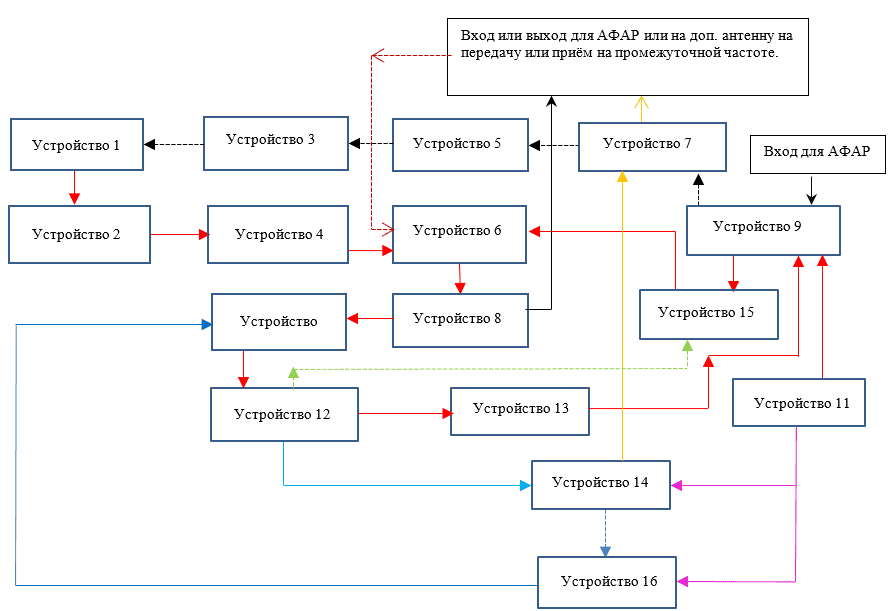
Рис. 19. Функциональная схема предлагаемого радио-модуля БПЛА с показом работы в различных режимах
Рассмотрим режим работы радио-модуля в качестве элемента АФАР при приёме. Устройство 1 представляет собой патч-антенны с наличием согласующих элементов по коэффициенту стоячей волны (КСВ) и полосковых линий для достижения оптимальной круговой поляризации на соответствующих слоях многослойной печатной платы АФАР. Отметим, что для АФАР с частотами от 250 МГц до 1142,5 МГц в многослойную печатную плату АФАР добавляются ещё сумматоры (делители) как показано на рисунке 7. Устройство 2 состоит из 4-х малошумящих усилителей (МШУ) расположенных соответствующим образом на многослойной печатной плате 1 по рисунку 7. Отображение печатной платы 1 показано на рисунке 8. При приёме сигналы с устройства 2 от 4-х МШУ поступают на устройство 4.
Устройство 4 на рисунке 19 представляет собой сумматоры от 4-х сигналов с МШУ, а также фазоинвертор на 180 градусов с использованием ключей и трансформатора для обеспечения круговой поляризации как правой, так и левой. Далее суммарный сигнал поступает на устройство 6. Устройство 6 – это МШУ со смесителем, где происходит смещение радиосигнала на промежуточную частоту порядка 300 МГц. Одновременно в устройстве 9, на основе синтезатора частоты 11 формируется гетеродинная частота, с учётом необходимой фазы для АФАР, поступающая от ПЛИС (устройство 12) через устройство 13 (цифро-аналоговый преобразователь ЦАП)). То есть, устройство 9 представляет собой балансный модулятор с усилителем и ключами, для обеспечения переключения сигнала с его выхода, либо на смеситель при приёме, либо на предусилитель для передачи информации или сигнала помехи на несущей частоте, а также с подключением к выходу дополнительной платы устройства управления АФАР в которой формируется общая гетеродинная или несущая частота. Таким образом, при приёме, сформированная гетеродинная частота через ключ (устройство 15) поступает на смеситель в устройстве 6. Далее сигнал на промежуточной частоте порядка 300 МГц поступает на устройство 8. Это устройство 8 состоит из предусилителя после смесителя в устройстве 6, фильтра, логарифмического усилителя на 100 дБ и ключа переключения, либо на выход на дополнительную плату устройства управления АФАР, для использования сигнала промежуточной частоты в режиме АФАР, либо на вход смесителей (устройство 10) для формирования сигналов в квадратуре на нулевой промежуточной частоте (в режиме радиоуправления БПЛА и связи). Отметим, что ПЛИС с ЦАП (устройство 12) радио-модуля используется для фазовой автоподстройки ФАПЧ и формирования сигнала информации в режиме связи и радиоуправления (в автономной работе), или изменяет фазу луча АФАР по информации от дополнительной платы устройства управления АФАР. Устройство 16 при автономной работе радио-модуля (вне АФАР) используется для формирования промежуточной частоты порядка 300 МГц от синтезатора (устройство 11) с подачей сигналов на смесители устройства 10, а устройство 14 это модулятор сигнала информацией на промежуточной частоте в режиме дуплекса. Более подробно работа радио-модуля в режиме дуплекса рассмотрена в [5].
В режиме передачи в варианте АФАР помеховый или информационный сигнал через ключ и СВЧ разъём (обозначено на рисунке 19 как вход для АФАР) поступает на устройство 9 (балансный модулятор) от дополнительной платы устройства управления АФАР (она располагается под платой 1 по рисунку 8). Здесь в устройстве 9 происходит изменение фазы для формирования луча АФАР. Далее передаваемый сигнал поступает на устройство 7. Устройство 7 – это предусилитель для усиления сигнала до уровня необходимого для обеспечения максимальных значений мощности в 4-х УМ. С устройства 7 передаваемый сигнал поступает на устройство 5, где происходит деление сигнала и переключение фазы для выполнения круговой поляризации как левой, так и правой. Отсюда сигнал поступает на устройство 3. Устройство 3 на рисунке 19 состоит из 4-х усилителей мощности (УМ) расположенных аналогичным образом как по рисунку 7, только на многослойной печатной плате 2 по рисунку 8. Далее сигнал поступает на АФАР (устройство 1).
Понятно, что при использовании унифицированных радио-модулей помимо режима АФАР, сохраняется возможность работы каждого радио-модуля отдельно на своей частоте (это повышает помехозащищённость) для связи и радиоуправления, а также передачи данных.
Соответственно для обеспечения дальнейшей обработки по выявлению радиосигнала противника необходимо после суммирования сигнала на промежуточной частоте обеспечить его перевод в цифровой вид за счёт сбрасывания сигнала на нулевую промежуточную частоту. С этой целью сигналы на промежуточной частоте, от платы подсоединённой к патч (плата 2 на рисунке 10), по СВЧ кабелю через соответствующие отверстия в нижней плате (плата1 на рисунке 9) поступают на дополнительную плату устройства управления АФАР, которая через диэлектрическую пластину снизу привинчивается к нижней плате (плата 1 на рисунке 9), где нет радиоэлементов. Функциональная схема этой дополнительной платы для АФАР показана на рисунке 20.
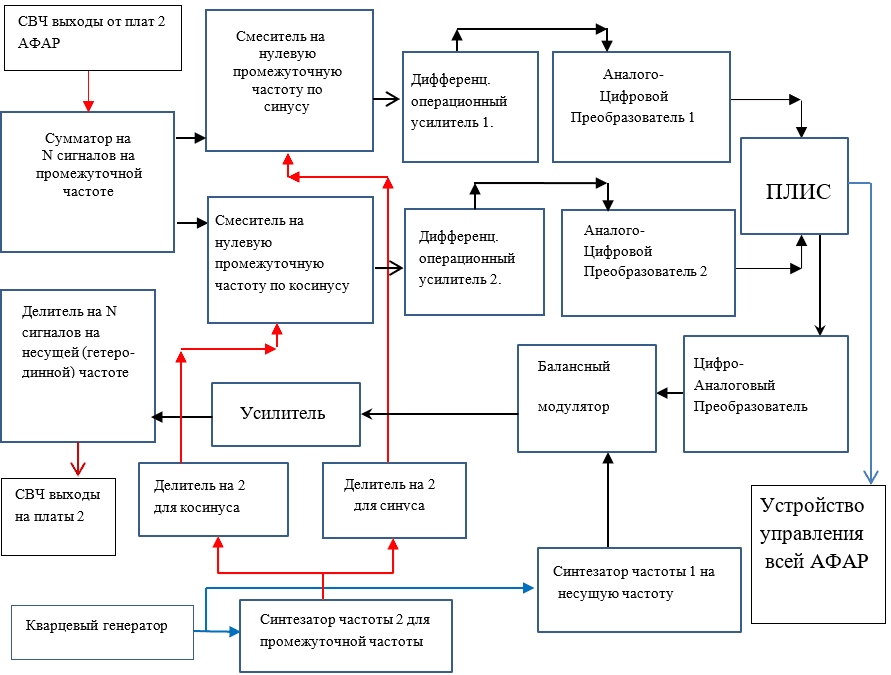
Рис. 20. Дополнительная управляющая плата для АФАР
Для случая АФАР при использовании всех элементов в единой системе формирования ДН антенны, СВЧ сигналы на промежуточной частоте порядка 300 МГц от плат 2 по рисунку 8 поступают на сумматор на дополнительной плате для АФАР. С сумматора сигнал поступает на смеситель на нулевую промежуточную частоту по синусу и на смеситель на нулевую промежуточную частоту по косинусу. На смесители, на гетеродинные входы поступает частота сигнала порядка 300 МГц от отдельного синтезатора частоты. Сигналы со смесителей поступают соответственно на дифференциальный операционный усилитель 1 и дифференциальный операционный усилитель 2. Далее сигналы поступают на аналого-цифровые преобразователи 1 и 2 (АЦП) и после оцифровки на ПЛИС. В ПЛИС происходит необходимая фильтрация с целью выявления наличия радиосигнала и подстройка по частоте Доплера с помощью ФАПЧ. С этой целью сигналы доплеровской частоты через ЦАП поступают на балансный модулятор и через усилитель на делитель на N каналов на платы 2 радио-модулей образующих АФАР. Однако здесь недостаток в том, что в случае работы АФАР как средства радиотехнической разведки мы не знаем несущую частоту радиосигнала противника и понятно не знаем времени накопления по коду и способу модуляции, поэтому, если принимаемый сигнал противника находится ниже уровня шумов, то выделить его в данном варианте обработки невозможно.
Соответственно стоит проблема обнаружения сигнала противника и для варианта, когда этот сигнал ниже уровня шумов. В соответствии с этим необходимо вспомнить, каким образом происходит выделение сигнала в приёмнике по кодовому сигналу с накоплением, что обеспечивает скрытность и возможность выделения сигнала ниже уровня шумов.
Суть упрощённой обработки в этом случае показана на рисунке 21.
Из рисунка 21 видно, что сигнал корреляции Sэ(t)×S(t) при наличии N символов будет накапливаться в степени N2 раз. Второй член Sэ(t)×n(t) не будет иметь накопления, так как нет корреляции. Соответственно информация выделяется по знаку кода, если приходящий код совпадает с эталонным кодом, то имеем в варианте ФКМ сигнала положительное значение символа информации, если приходящий код инверсный, то символ отрицательный. Понятно, что мы не можем знать эталонного кода противника, но он нам и не нужен. У нас стоит задача выделения самого наличия сигнала противника в выбранном направлении. С этой целью необходимо разбить АФАР на две самостоятельные парциальные АФАР, но которые имели бы когерентную обработку приходящего сигнала. В результате мы будем иметь следующую упрощённую функциональную схему выделения сигнала по рисунку 22.
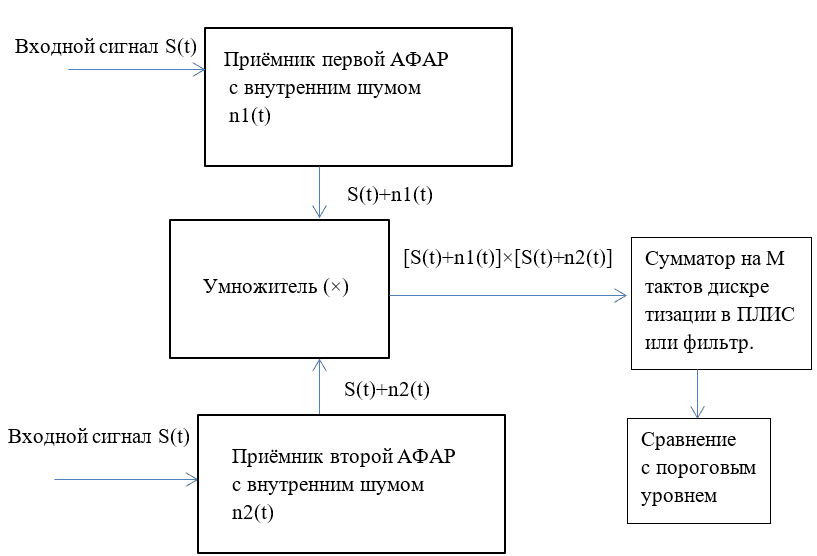
Понятно, что в этом случае при сумме М тактов дискретизации будет накопление сигнала противника в виде (М×S(t))2. Все остальные сигналы не будут иметь накопление, так как нет корреляции. Это позволит выделить сигнал противника за некоторый промежуток времени по превышению над пороговым уровнем.
В соответствии с необходимостью выделения радиосигнала противника из шумов входная часть функциональной схемы по рисунку 20 должна быть изменена (путём использования ключевых схем) для получения функциональной схемы по рисунку 22, но с учётом каналов по синусу и косинусу. Необходимая изменённая часть схемы представлена на рисунке 23.
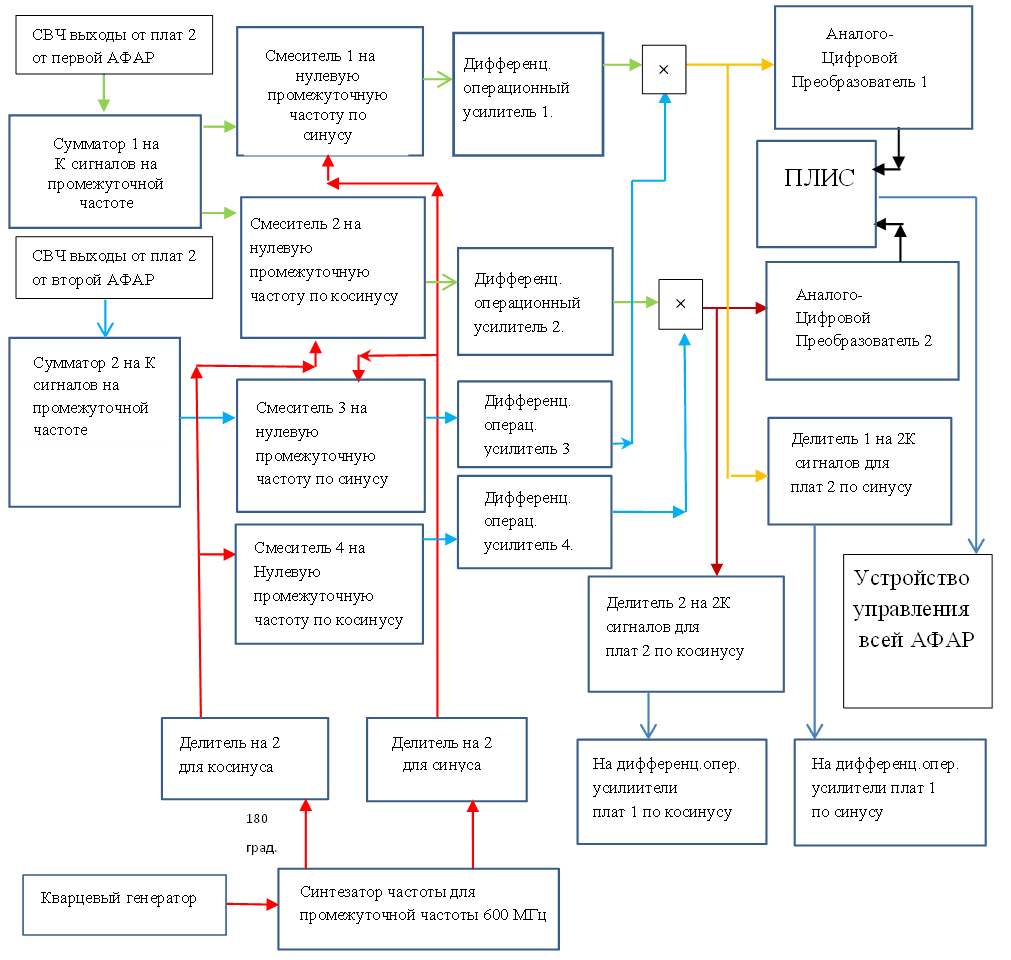
Рис. 23. Функциональная схема по выделению радиосигнала противника
Опишем принцип работы по выделению радиосигналов противника по функциональной схеме на рисунке 23.
Принимаемые радиосигналы от двух АФАР, когерентность приемников которых обеспечивается за счёт общего гетеродинного сигнала от дополнительной управляющей платы АФАР (Рис.20), переносятся в платах 2 на промежуточную частоту и после усиления через ключ поступают на дополнительную управляющую плату АФАР. Здесь сигналы на промежуточной частоте от каждой АФАР суммируются по отдельности и эти сигналы от двух АФАР поступают на соответствующие смесители по синусу и косинусу и далее на соответствующие дифференциальные операционные усилители. Далее сигнал по синусу от первой АФАР перемножается с сигналом по синусу от второй АФАР. Аналогично, сигнал по косинусу от первой АФАР перемножается с сигналом по косинусу от второй АФАР, и эти сигналы с одной стороны через АЦП 1 и 2 поступают на ПЛИС, а с другой стороны, через соответствующие ключи (при обеспечении поиска радиосигнала по частоте), поступают через делители сигналов на платы 1 (рисунок 9) как первой, так и второй АФАР, и далее на соответствующие дифференциальные усилители.
Рассмотрим вначале принцип выделения радиосигнала противника в ПЛИС дополнительной управляющей платы АФАР. Здесь радиосигналы суммируются по формуле: S2sin(t)+ S2cos(t)=S2(t). До этого, радиосигналы в квадрате по синусу и косинусу будут иметь только огибающую с двойной частотой от разности частот от принимаемого радиосигнала (fc), суммарной частоты сигнала гетеродина (fг) и промежуточной частоты сигнала, например, в 300 МГц (fпр) в виде 2×(fc-fг-fпр). При суммировании сигналов от канала синуса и косинуса эта огибающая с двойной частотой исчезает. Далее, после фильтрации, можно обеспечить для обнаружения сигнала сравнение с пороговым значением. Понятно, что чем больше цифровых звеньев в фильтре, тем больше накопление, и тем на большей дальности возможно определение радиосигнала противника. Если порог будет превышен, то это будет означать, что есть радиосигнал противника в данном направлении в данной полосе частот. Однако полоса пропускания фильтра в плате 2 в АФАР может достигать 60 МГц. Поэтому при полосе пропускания в АФАР порядка 150 МГц - 200 МГц вначале желательно сделать поиск за счёт изменения частоты гетеродина. Но, в эту полосу могут попадать несколько радиосигналов противника с разных направлений в соответствии с шириной ДН АФАР. Поэтому желательно сузить полосу пропускания при определении радиосигнала противника с данного направления, чтобы разделить сигналы. Вот с этой целью с умножителей по синусу и косинусу сигналы с двойной частотой через делители на дополнительной плате АФАР поступают на платы 1 АФАР. Здесь через соответствующие дифференциальные усилители и АЦП они поступают на ПЛИС. При этом каждый ПЛИС на плате 1 имеет цифровые фильтры для каналов синуса и косинуса настроенные на определённую частоту с разносом по частоте 60 МГц/(2К). При К=8 (это соответствует наличию 16 радио-модулей на весь АФАР) мы будем иметь цифровые фильтры, разнесённые по частоте на величину равную 3,75 МГц. Для того чтобы осуществить фильтрацию, необходимо превратить приходящие на ПЛИС сигналы одной полярности в биполярные сигналы за счёт вычитания цифрового значения, обеспечивающего одинаковые амплитуды в области положительных и отрицательных значений. Фильтрация на заданную частоту заключается в том, что смена фазы в цифровых звеньях осуществляется в соответствии с выбранной частотой. После фильтрации на полосу пропускания в ПЛИС сигналы по синусу и косинусу превращаются в сигналы одной полярности за счёт инверсии отрицательных значений в положительные. Полученные сигналы по синусу и косинусу суммируются, и далее этот сигнал может иметь также дополнительную фильтрацию с дальнейшим сравнением с пороговым значением. Таким образом, будут разделены и выявлены радиосигналы противника с разнесёнными частотами в полосе 60 МГц при полосе пропускания для каждого сигнала в 3,75 МГц, которые попали в ДН АФАР. Однако и в полосе 3,75 МГц может присутствовать также несколько радиосигналов. В этом случае выбирается желаемая частота радиосигнала противника, и ПЛИС от 16 радио-модулей на плате 1 настраиваются на частоты с цифровой фильтрацией с разбиением этого интервала частот на 16. И обработка повторяется по уже описанному алгоритму. Понятно, что таким образом мы можем определить частоту радиосигналов противника вплоть до доплеровской частоты. Далее для уточнения местоположения радиосигнала противника можно использовать, например, метод конического сканирования ДН АФАР около предполагаемого местоположения излучаемого радиосигнала, с получением пеленгационной характеристики. Однако мы уже отмечали, что АФАР размещаются на боковых поверхностях БПЛА и определение углового местоположения они осуществляют в режиме барражирования местности вдоль линии соприкосновения. С целью уничтожения источника радиосигнала необходимо, либо АФАР располагать в носовой части БПЛА с наведением на цель, либо определять точное месторасположение источника радиоизлучения и накрывать цель, например артиллерией. Отметим, что, сейчас имеется вариант ЦН 4 как беспилотного комплекса артиллерийской разведки (БКАР), который работает для пеленгации в X-диапазоне с основной целью выявления координат РЛС артиллерийской разведки НАТО как AN/TPQ-36 (AN/TPQ-48). БКАР имеет прямую автоматизированную связь через ЕСУ ТЗ с артиллерийскими батареями ВС РФ, чтобы РЛС или радиостанция были поражены в кратчайшие сроки после их выявления.
Однако, если для частот порядка 2 ГГц - 10 ГГц метод пеленгации за счёт узкого луча диаграммы направленности (ДН) АФАР не представляет трудностей, то для АФАР меньше 2 ГГц такое расположение становится невозможным из-за габаритных размеров, при этом имеется малый коэффициент усиления АФАР. Понятно, что если поставить помеху в режиме барражирования, один БПЛА с АФАР ещё может, то для наведения на источник излучения требуется ещё один БПЛА, который на больших расстояниях от цели имел бы наведение по командной радиолинии. На малых расстояниях (менее 1 км - 2 км) он мог бы уже самостоятельно наводиться на источник излучения. Как отмечают в Пентагоне, обычно «Орлан-10» применяется «стаей» из трёх БПЛА. Первый БПЛА ведёт оптическую разведку на высоте 1-1,5 км, второй БПЛА выполняет функцию радиотехнической разведки или РЭБ, третий БПЛА, в отдалении, выполняет роль ретранслятора связи для первых двух.
В соответствии с этим к трём БПЛА можно добавить четвёртый БПЛА, который имел бы возможность наводиться на источник радиоизлучения на малых расстояниях. На основании этого в АНО «НТИЦ «Техком» был разработан метод, по которому возможно наведение на цель при размещении унифицированного радио-модуля размерами 14 см×7 см в передней части такого БПЛА как «Орлан» или «Ланцет». Принцип наведения за счёт эллиптической диаграммы направленности подробно расписан в [6].
Данный метод можно использовать на частотах от 1142,5 МГц до 2170 МГц. В этом случае эллиптическую диаграмму направленности образуют два патч, которые умещаются в размеры радио-модуля 14 см×7 см. В этом случае мы будем иметь общий коэффициент усиления порядка 11,5 дБ.
Причём диаграмма направленности по оси от двух патч представлена на рисунке 25.
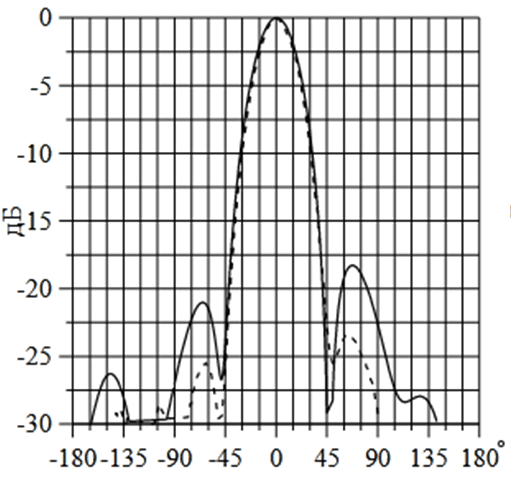
Рис. 25. Диаграмма направленности в направлении оси от двух патч
Соответственно диаграмма направленности луча от одной патч будет в 2 раза шире. Таким образом, при прямоугольных размерах патч-антенны у нас формируется основной луч антенны в форме эллипса, что показано на рисунке 26.
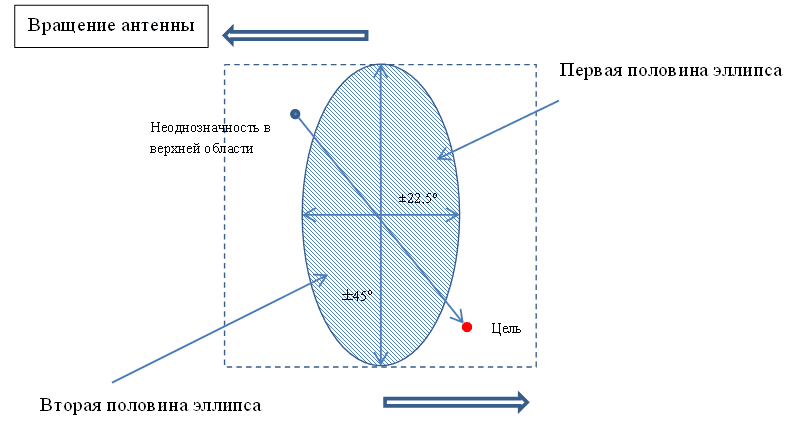
Рис. 26. Диаграмма направленности основного луча по двум ортогональным осям, состоящим из 2 патч для несущих частот от 1142,5 МГц - 2170,75 МГц
Из рисунка 26 видно, что добавление вращения патч-антенны в плоскости перпендикулярной направлению к движению БПЛА даёт возможность получить амплитудную модуляцию радиосигнала, приходящего от цели. Отметим, что амплитудная модуляция принимаемого сигнала в оптическом диапазоне волн ранее использовалась в головках самонаведения (ГСН) (рисунок 27), при этом имелось изменение по частоте в зависимости от места расположения цели.
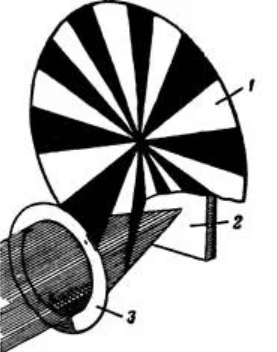
Рис. 27. Принцип работы ГСН инфракрасного диапазона волн
Здесь сигнал от цели поступает на фокусирующую линзу (3) и с неё через вращающийся диск модуляции сигнала (1) поступает на фотоприёмник (2).
Отличие нашего способа в том, что нет необходимости в фокусирующей линзе, так как вместо неё используется коэффициент усиления антенны. Здесь происходит вращение диаграммы направленности при вращении предлагаемого радио-модуля в плоскости перпендикулярной к направлению движения БПЛА, а не модулирующего диска. То есть, мы имеем способ, основанный на нахождении цели в точке расположения по рисунку 26, и в этом случае основной луч патч-антенны при вращении, за счёт формы эллипса, периодически обнаруживает точку нахождения цели. Начальное угловое расположение диаграммы направленности (точка отсчёта) определяется на основании фото импульсов, например, от светодиода, расположенного на обратной стороне вращающегося радио-модуля, который совмещается с отверстием в экране (это неподвижный диск с одним отверстием) с обратной стороны радио-модуля только один раз за оборот. При этом в фотоприёмнике за экраном с обратной стороны радио-модуля формируется импульс. В этом случае мы будем иметь модуляцию сигнала в течение времени попадания источника излучения в луч патч-антенны, что показано на рисунке 28.
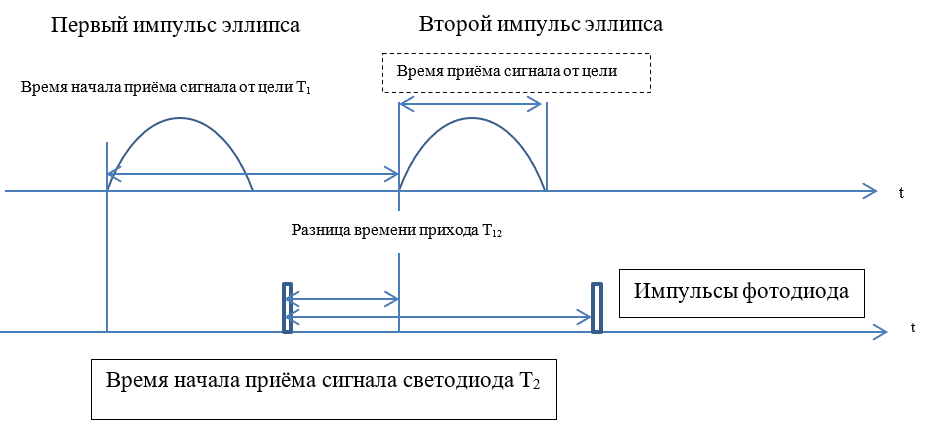
Рис. 28. Временная диаграмма, определяющая формирование времени приёма сигнала от цели
Соответственно время Т12+Т3/2 пересчитывается в градусы угла, аналогично «стрелке часов на циферблате», от фиксированного места расположения на БПЛА фотоприёмника, который имеет привязку к системе координат БПЛА, до места начала приёма сигналов от цели. Время приёма сигнала от цели – Т3, благодаря форме эллипса диаграммы направленности, позволяет определить величину радиуса («длину стрелки») и на основании этих значений можно вычислить местоположение цели по направлению. Так как радио-модуль крепится к металлическому стержню играющего роль оси вращения, то обеспечение вращения может осуществляться от стержня вращения пропеллера БПЛА, через соответствующую механическую передачу. В данном случае скорость вращения радио-модуля со скоростью вращения пропеллера БПЛА является вполне достаточной. Кроме того, определим приём радиосигнала противника на расстоянии Dц=2 км от БПЛА при излучении сигнала противника мощностью Рц=0,1 Вт и коэффициенте усиления антенны Gц=0,5 (-3 дБ). Здесь учитывается, что мощность излучения при Wi-Fi может составлять 16 дБм (0,04 Вт, при полосе при скорости передачи в 200 кбит/сек). При этом будем считать, что передача информации радиосигналом противника осуществляется символами со скоростью передачи 50 Мбит/сек, и соответственно имеется накопление по коду при несущей частоте 2 ГГц (λц=0,15 м). Коэффициент усиления антенны БПЛА считаем равным Gбпла= 7,94 (9 дБ). При этом отношение сигнал/шум в приёмнике радио-модуля считаем равным q=27 (вероятность ошибки 10-6-10-7). Здесь также k - это постоянная Больцмана, а Тш=600оК –шумовая температура. Отсюда вычислим необходимую полосу пропускания в радио-модуле по формуле:
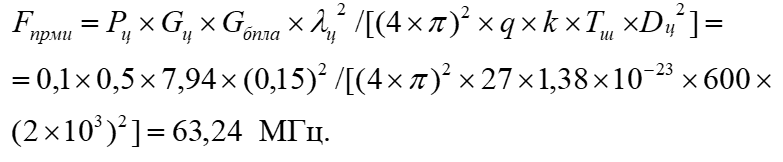 (1)
(1)
Таким образом, до дальности в 2 км наведение БПЛА на цель надо осуществлять по командной радиолинии. Так как цель должна находиться не по центру движения БПЛА, то в этом случае необходимо использовать метод параллельного сближения, который заключается в том, что всё время выдерживается один и тот же угол нахождения цели в процессе движения БПЛА [9]. Сигналы управления от радио-модуля при его вращении могут передаваться на частоте порядка 250-500 МГц как бы в режиме Wi-Fi на устройство управления. Так, в [5] была показана автономная работа предлагаемого радио-модуля в дуплексном режиме с наличием дополнительной широко направленной антенны, и возможностью подсоединения электрических батареек питания с нижней стороны платы 1 к радио-модулю.
Но возможен случай, когда оказывается экономически невыгодно использовать БПЛА в качестве средства поражения. В этом случае можно применить метод определения местоположения для нанесения артиллерийского удара подобный тому, который используется в системах навигации, таких как GPS или ГЛОНАСС. Отличие в том, что помимо необходимости в методе иметь временную синхронизацию и точное определение местоположения 3-х или 4-х БПЛА в режиме их барражирования, надо обеспечить синхронизацию гетеродинных частот, промежуточных частот и тактовых частот (промежуточную и тактовую частоту ПЛИС можно объединить), поступающих на смесители, АЦП и ПЛИС. Одновременно можно сформировать промежуточную частоту за счёт деления основной гетеродинной частоты. Таким образом, потребуется синхронизация только основной гетеродинной частоты. Синхронизацию гетеродинных частот нескольких БПЛА можно осуществить на основе фазовой автоподстройки частоты (ФАПЧ), когда формирование необходимой эталонной частоты осуществляется в одном БПЛА и передаётся на все остальные БПЛА. При этом, задержки будут определяться относительно времени моментов перехода через ноль двойной частоты смещённого радиосигнала противника по каналам синуса и косинуса после превращения в бинарный вид и соответствующей фильтрации до их суммирования. Иными словами, вместо накапливаемого кода используется огибающая двойной частоты 2×(fc-fг-fпр) на выходе умножителей по синусу и косинусу по рисунку 23 после фильтрации в ПЛИС. Точность определения времени прихода будет тем выше, чем большее количество переходов через ноль с учётом сплайнов фиксируется. Одновременно желательно обеспечить фильтрацию близкую к значению 1 кГц, что будет эквивалентно накоплению кода в 1024 бита в течение 1 млсек. Далее эти времена прихода в одном из БПЛА сравниваются с временами прихода радиосигнала противника от других БПЛА, что было показано нами в [3,10]. В дальнейшем метод аналогичен методу, который применяется в GPS. Здесь так же как и методе GPS и ГЛОНАСС учитывается разность времён прихода. Синхронизация часов может осуществляться ещё до полёта БПЛА и корректироваться на основе эталонной частоты.
Таким образом, мы показали, что только на основе унифицированного оптимизированного радио-модуля [1-6] мы можем обеспечивать реализацию АФАР в диапазоне от 0,25 ГГц до 4 ГГц без учёта дальнейшей микроминиатюризации. При этом АФАР может использоваться не только как средство связи и радиоуправления на основе унифицированных радио-модулей, но и выполнять радиотехническую разведку с определением местоположения источника радиосигнала противника, а также его уничтожения. Кроме того, АФАР может использоваться и как средство РЭБ, например, для БПЛА противника, особенно при подлёте на близкое расстояние.
