
В соответствии с [1, 2, 3, 4] мы установили оптимальные радиотехнические параметры для радио-модуля БПЛА и первичные возможные функциональные схемы с учётом использования в широком диапазоне частот для радиоуправления, радиосвязи и навигации с определением максимума по скрытности передаваемого сигнала для средств радиотехнической разведки (РТР). При этом, максимальная скорость передачи информации в режиме BPSK (ФМ-2) была определена в 38-50 Мбит/сек, в режиме QPSK (ФМ-4) в 76-100 Мбит/сек, а в режиме QAM (ФМ-4 с амплитудной двухуровневой модуляцией) в 114 -150 Мбит/сек. Тактовая частота дискретизации должна быть от 114 до 150 МГц, что связано с необходимостью наличия 3 тактов на символ с целью исключения ошибки дискретизации при выполнении теоремы Котельникова. Аналого-цифровой преобразователь (АЦП) должен иметь разрядность в 13-14 бит для повышения точности определения смещения частоты Доплера, и времени прихода сигналов для навигации за счёт использования сплайнов по амплитуде. Кроме того, мы показали возможность размещения радиоэлементов для узлов БПЛА на платах при наличии размеров не более, чем у аналогов и прототипов, и привели первичные соответствующие функциональные схемы. Далее в [5, 6] мы рассмотрели оптимизацию радио-модуля БПЛА на основе выбора конкретной функциональной схемы и конструктивного размещения радиоэлементов с учётом многофункциональности и ширпотреба, так как это позволяет значительно сократить издержки по изготовлению и быстро осуществить экспериментальную проверку режимов работы. При этом оптимизация проведена с учётом сравнения с существующими аналогами и прототипами. В [7] была рассмотрена возможность самого создания АФАР БПЛА на предлагаемых радио-модулях при многофункциональном использовании в широком диапазоне частот. Здесь фактически получило обоснование функциональная схема с использованием промежуточной частоты перед сбросом сигнала на нулевую частоту, что позволяет осуществить сложение сигналов по фазе от патч - антенн, и при этом стало возможно использовать режим дуплекса на несущей и промежуточной частоте. Это фактически позволяет совместить свойства направленной антенны на несущей частоте с ненаправленной антенной на промежуточной частоте и повысить помехозащищённость. Однако теперь необходимо оценить возможности использования АФАР на радио-модулях для конкретных режимов работы на современном театре военных действий (ТВД) и при применении помехозащищённых протоколов связи. Самыми простыми функциями, которыми должен обладать БПЛА – это иметь радиоуправление и передавать необходимые данные, например, оптическое изображение местности, на командный пункт управления (КПУ). По сути это означает использование БПЛА как средства связи с приёмом и передачей. Соответственно как показывает опыт боевых действий, наибольшая эффективность достигается при применении нескольких БПЛА, имеющих между собой связь, что позволяет повысить помехозащищённость и решать конкретные задачи по радиотехнической разведке (РТР), радиоэлектронной борьбе (РЭБ), обнаружению средств противника и определению их местоположения.
При наличии нескольких БПЛА не обойтись без многопользовательского варианта связи. Кроме того, БПЛА могут являться наиболее надёжным способом связи между военными подразделениями в силу малозаметности и мобильности. В соответствии с этим необходимо рассмотреть известные способы связи при большом количестве пользователей, но в рамках оптимизированного варианта АФАР исходя из возможных размеров размещения на БПЛА. В данном случае при наличии АФАР из 16 предлагаемых радио-модулей из радиоэлементов ширпотреба по [7] с размещением на БПЛА Орлан - 10. При этом мы должны рассмотреть все многофункциональные режимы такой связи для обеспечения помехозащищённости. За основу аналогов связи в режиме телефонного разговора (ТЛФ) и режима «Интернет» при использовании АФАР с большим количеством пользователей примем системы используемые в низкоорбитальных спутниковых системах связи (НССС) таких как «Iridium», «Globalstar», «OneWeb» и «Starlink». При этом, при сравнении с предлагаемыми вариантами, мы будем учитывать, что основная разница будет в количестве пользователей, радиотехнических параметрах, и расстоянии и местоположении до пользователей. Рассмотрим вначале временную диаграмму кадра связи для пользователей НССС «Iridium» по рисунку 1.
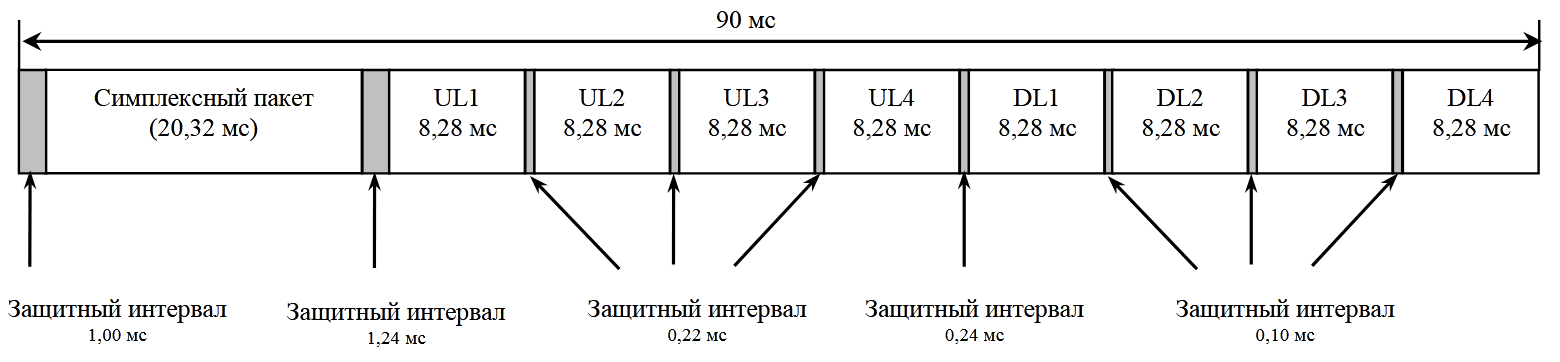
Рис. 1. Формат МДВР - кадра космического аппарата (КА) «Iridium» (UL1-UL4 – восходящие каналы, D4 – нисходящие каналы)
Собственно данный формат используется уже после поиска, обнаружения сигнала и вхождения в связь с абонентом при временном согласовании. Здесь, вначале для подстройки и служебной информации используется преамбула (Simplex-симплексный пакет) в течение 20,32 млсек. При этом присутствует временное разделение между четырьмя пользователями на приём и передачу. Защитный интервал в 100 мксек при передаче на абонента связан с тем, что существует различная дальность от КА до абонента, и она допускается на величину в 30 км с учётом скорости света. При передаче от абонента на КА это различие взято с допуском более 66 км (220 мксек). Такой выбор, видимо, связан с тем, что возможен вариант моментального ответа при малом количестве пользователей. Скорость передачи информации на одного пользователя в режиме ТЛФ составляет 2,4 кбит/сек при обслуживании одним КА 2500 пользователей одновременно. Данная скорость передачи информации выбрана уже с учётом исключения ошибок при приёме. При этом скорость передачи информации на одного пользователя при выбранном кадре по рисунку 1 должна быть в 50 кбит/сек. Это означает, что в течение одного кадра в 90 млсек, будет принято информации одним пользователем в 50 кбит/сек × 8,28 млсек=414 бит. За одну секунду это составит 4,6 кбит/сек, то есть в 2 раза больше, чем отмечено выше, что собственно позволяет использовать для исключения ошибок даже код Манчестера. При этом, один космический аппарат (КА) способен обслуживать одновременно 6 АФАР ×8 лучей ×4 слота × 6 параллельных каналов приёма (передачи)=1152 абонента при приёме со скоростью 4,6 кбит/сек. Относительно систем связи военного назначения НССС «Iridium» обладает низкой помехоустойчивостью, так как не использует кодирование битов информации в силу того, что скорость передачи информации в 50 кбит/сек идёт непрерывно, что позволяет разговор со скоростью не более 4,6 кбит/сек при большом количестве абонентов. В отличие от системы связи «Iridium» система связи «Globalstar» использует кодирование информации в 128 бит на символ информации, но при скорости передачи в 1,2228 Мбит/сек. При этом скорость передачи информации может быть, от 2,4 кбит/сек до 9,6 кбит/сек. Отсюда следует, что если мы хотим повысить скорость передачи информации с использованием возможности повышения помехоустойчивости, то нам необходимо увеличивать скорость передачи символов с наличием кодирования. Учитывая уменьшение расстояния от БПЛА до абонента, как минимум в 50 раз по сравнению с космическими системами, мы имеем преимущество в энергетическом потенциале в 2500 раз. Это позволяет повысить скорость передачи с 50 кбит/сек до 125 Мбит/сек. Однако как мы показали в [1] скорость передачи ограничивается исходя из роста энергетических потерь в квадрате в зависимости от частоты. При этом оптимальный вариант скорости передачи существует в пределах от 38 Мбит/сек до 50 Мбит/сек (BPSK), и здесь тактовая частота дискретизации с учётом теоремы Котельникова и исключения ошибок от дискретизации должна быть в три раза выше до 150 Мбит/сек. Это означает, что добиться максимума порядка 125 Мбит/сек-150 Мбит/сек можно, используя более сложную модуляцию, например, модуляцию QAM, при соответствующих энергетических потерях, которые имеют прямо пропорциональную зависимость. Отсюда оптимум уже определяется тем, что усложнение модуляции даёт рост потерь пропорционально, в то время как за счёт увеличения тактовой частоты дискретизации энергетические потери возрастают по квадратичной зависимости. Собственно, данная скорость передачи информации оптимальна и для режима «Интернет» (это системы связи «OneWeb» и «Starlink») и приёма цифрового оптического изображения с высоким разрешением, так как при передаче информации на КПУ можно использовать метод модуляции QAM (амплитудная модуляция по двум возможным уровням амплитуды совместно с ФМ-4) вместо BPSK (ФМ-2), при скорости от 114 Мбит/сек до 150 Мбит/сек. Как мы показали в [1-7], предлагаемые радио-модули в составе АФАР на БПЛА позволяют обеспечивать режимы работы известных систем связи для многопользовательских услуг. Соответственно теперь необходимо определить возможности АФАР БПЛА при конкретном функциональном решении в помехозащищённом режиме протокола связи. Понятно, что начальный этап связан с поиском и обнаружением сигнала вызова от абонента или БПЛА. Это означает, что желательно выделить начальное время (оно должно повторяться периодически), в течение которого будет осуществляться привязка абонентов к БПЛА для радиосвязи. Для учёта периодичности запросных сигналов будем ориентироваться на то, что в системе связи «Iridium», в типичных эксплуатационных условиях продолжительность сигнала «звонок» составляет 2,1 с. Отсюда соответственно выделяются начальные запросные временные промежутки времени для сигнала от БПЛА к абонентам и временные промежутки для ответа или вызова от абонентов к БПЛА. При этом желательно, чтобы режим вызова вписывался в режим кадра работы в телефонном режиме (ТЛФ), что исключает смену режимов через две секунды. Однако в отличие от системы «Iridium» здесь необходимо соблюсти скрытность ответных и запросных сигналов. Это достигается за счёт использования разных несущих частот при запросе и ответе, с возможным изменением этих частот во времени по определённому закону известному абонентам и БПЛА и при наличии кодового сигнала с уровнем амплитуды в шумовом сигнале, что обеспечивает выделение сигнала информации за счёт накопления. При этом длительность кодового сигнала должна быть такова, чтобы поиск и обнаружение имели минимальное время.
Будем исходить из того, что мы должны обеспечить надёжную связь с помощью БПЛА находящихся в тылу с абонентами в войсках на дальности 20 км от линии соприкосновения. Это позволяет исключить поражение средствами ПВО противника, которые тоже не могут располагаться близко к линии боевого соприкосновения из-за возможности уничтожения огнём артиллерии. Вычислим, какая в этом случае будет допустимая полоса пропускания у абонента, чтобы в течение времени вызова сигнал БПЛА не был обнаружен.
Вначале мы будем предполагать использование для обнаружения сигнала наземных средств РТР и ПВО противника, и считаем, что высота полёта нашего БПЛА в режиме связи не превышает 150 метров. Расчёт видимости БПЛА средством РТР противника, находящегося на Земле, будем проводить по формуле, представленной в [8], где L – расстояние прямой видимости [км], а h=150 – высота полёта БПЛА [м]:
 (1)
(1)
Таким образом, определим приём наших радиосигналов наземным мобильным средством РТР противника на расстоянии Dцртр=40 км от БПЛА. То есть дальность средства РТР противника от линии соприкосновения на ТВД также составляет 20 км. Как показано по формуле (1), это не позволяет противнику обнаружить сигнал от БПЛА или сам БПЛА на дальних расстояниях более 40 км с высоким коэффициентом направленного действия (к.н.д.) антенны. Иными словами средства РТР противника также должны быть мобильными и в большом количестве. Средства РТР обычно используются совместно со средствами радиоэлектронной борьбы (РЭБ), так как просто обнаружить сигнал от БПЛА это не значит прервать связь. Уничтожить БПЛА на дальности в 40 км средствами ПВО довольно сложная задача, так как могут использоваться отвлекающие источники сигналов от других БПЛА, а в условиях гибкой перестройки параметров связи ответ в виде помехи должен быть практически мгновенным. Соответственно, время связи без влияния помех на театре военных действий (ТВД) играет первостепенную роль, но по сигналу помехи возможно определение местоположения средства РТР противника, которые стоят не дёшево, так как здесь требуется радиотехническая разведка в широком диапазоне частот от сотен МГц до десятков ГГц. Собственно эффективная поверхность рассеяния (ЭПР) от антенн РТР противника при охвате широкого диапазона частот достаточно велика и может быть до нескольких квадратных метров с учётом мобильного наземного средства передвижения. Поэтому в этом случае важно иметь такие средства подальше от линии боевого соприкосновения, чтобы не быть уничтоженными артиллерией.
Для обеспечения скрытности будем предполагать использование сигнала вызова от БПЛА мощностью Рц=0,04 Вт. Здесь учитывается, что мощность излучения, например, при методе Wi-Fi может составлять 16 дБм (0,04 Вт), при скорости передачи в 200 кбит/сек, что в 4 раза выше, чем для системы «Iridium», при дальности связи в несколько километров, и при отсутствии направленных антенн. В нашем случае используется АФАР БПЛА, что существенно увеличивает расстояние для связи, тем более в режиме ТЛФ. При этом мы будем предполагать, что применяется для связи АФАР, состоящая из 16 радио-модулей [7], как это показано на рисунке 2.
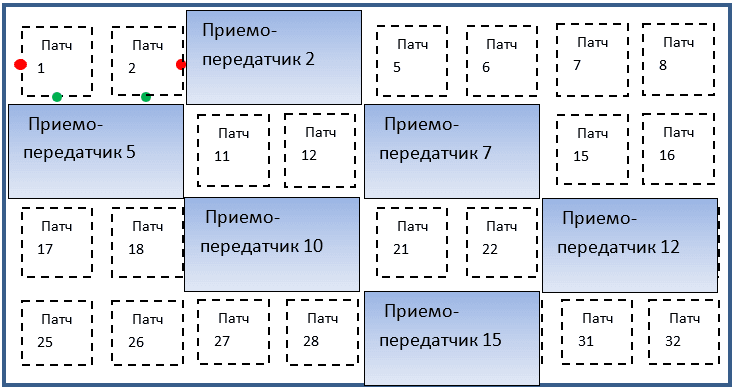
Рис. 2. АФАР для связи, состоящая из 16 радио-модулей при 32 патч, здесь возможно управление лучами, как по азимуту, так и углу места при 4-х под АФАР
При определении коэффициента усиления АФАР (как РТР, так и БПЛА) будем исходить из известных аналогов и прототипов. Так, известна антенна [9] по рисунку 3.
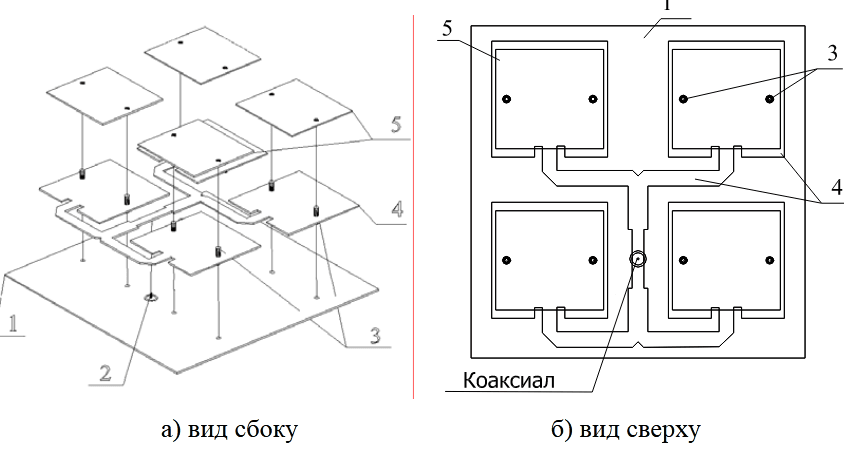
Рис. 3. Антенна АФАР из 4-х элементов с воздушным заполнением
Эта антенна из 4-х элементов обеспечивает коэффициент усиления в 14,5 дБ при КСВ равным 1,2, в диапазоне 2,35 ГГц-2,55 ГГц. Диаграмма направленности представлена на рисунке 4.
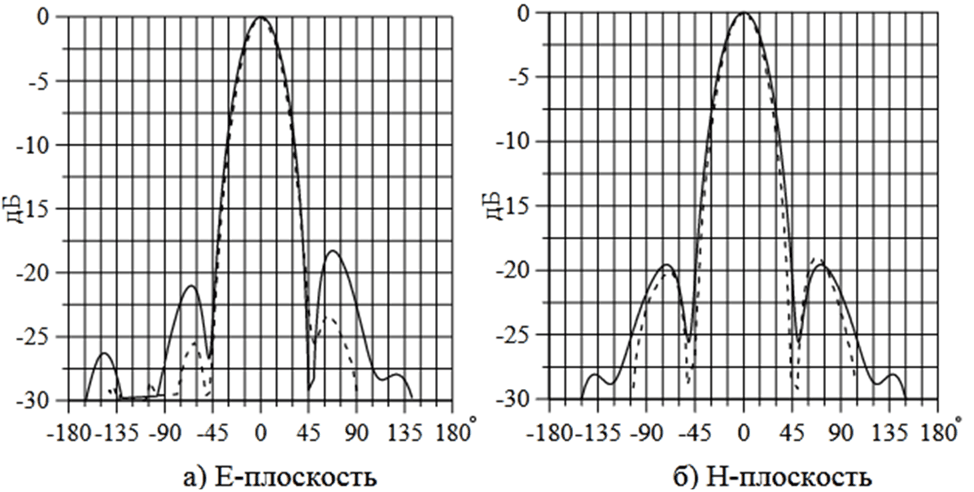
Рис. 4. Антенна из 4-х элементов патч, моделирование – это сплошные линии, штриховые линии – это экспериментальные с шириной диаграммы направленности в 34 градуса
Преимущество нашего варианта в том, что у нас питающий шлейф не находится на плоскости расположения патч, а находится внутри на соответствующем слое многослойной печатной платы антенны. Так как у нас АФАР БПЛА состоит из 32 элементов патч, то соответственно коэффициент усиления в 8 раз выше и будет составлять Gбпла= 223,341 (23,5 дБ) при размерах 56 см × 28 см (один радио-модуль имеет размеры 14 см × 7 см). Соответственно при приёме сигнала вызова от нашего БПЛА в направлении на средство РТР противника по уровню первого бокового лепестка (-18 дБ), исходя из рисунка 4, коэффициент усиления составит Gцбл= 223,341/63,1=3,54 (23,5 дБ-18 дБ=5,5 дБ). При этом будем считать, что передача информации радиосигналом от БПЛА осуществляется символами, со скоростью передачи 41 Мбит/сек, и соответственно имеется накопление по коду при несущей частоте 2,4 ГГц (λц=0,1363 м). В нашем случае коэффициент усиления антенны РТР противника с учётом [9] и при размерах 56 см× 56 см может иметь значение Gртр= 446,683592 (17,5 дБ+9 дБ=26,5 дБ), что сравнимо с коэффициентом усиления одной из шести антенн на космическом аппарате (КА) системы связи «Iridium». Аналогичные размеры антенн в диаметре порядка 60 см имеют антенны для абонентов в системе связи «Starlink». Это достаточно оптимистичная цифра, так как антенны средства РТР должны иметь широкий диапазон частот, а это сказывается на коэффициенте усиления антенны. Надо отметить, что мы используем относительные цифры в оценке коэффициентов усиления АФАР БПЛА и АФАР РТР противника, чтобы чувствительности приёмников при расчёте имели относительную величину по отношению друг к другу и не сказывались на оценке помехозащищённости. Кроме того, мы также предполагаем возможность установки АФАР РТР на БПЛА, и в этом случае из-за ограничения по габаритам коэффициент усиления антенны РТР будет значительно меньше с разделением по диапазонам частот. Далее считаем отношение сигнал/шум в приёмнике радио-модуля равным q=27 (вероятность ошибки 10-6-10-7). Здесь также k – это постоянная Больцмана, а Тш=600оК – шумовая температура. Отсюда вычислим необходимую полосу пропускания в приёмнике РТР противника для обнаружения сигнала БПЛА по формуле:
 (2)
(2)
Это означает, что наземное мобильное средство РТР противника на такой дальности и при такой мощности нашего сигнала не способна по одному импульсу при скорости передачи в 41 Мбит/сек определить наличие сигнала и требуется накопление в 2 импульса. Поэтому, чтобы выделить символ в 41 Мбит/сек требуется приближать наземное мобильное средство РТР на дальность до линии соприкосновения до 8 км, что обеспечивает поражение средствами артиллерии. Собственно, в современных системах РТР определение наличия сигнала происходит в автоматическом режиме, и поэтому даже при обнаружении короткого одиночного импульса при полосе пропускания средства РТР, например, в 50 МГц, он будет воспринят как скачок шумового сигнала, если не происходит его устойчивого повторения. Действительно, если по каждому одиночному импульсу выставлять сигналы помехи, то БПЛА может использовать вначале импульсную перестройку частоты в целях введения в заблуждения (такой вариант сигналов для абонентов будет показан несколько ниже), и тогда весь помеховый сигнал будет «размазан» по всему возможному спектру частот. Однако для определения повторения необходимо сужение полосы пропускания. Повторение сигнала на одной несущей частоте, при приёме информации связано с необходимостью подстройки по частоте Доплера для когерентной обработки. Понятно, что в этом случае, например, при использовании кода Манчестер в сигнале от БПЛА выделение огибающей при полосе в 20 МГц с помощью диода в приёмнике РТР противника также не даст превышение над порогом чувствительности из-за компенсации по фазе. Реализовать обнаружение такого сигнала от БПЛА можно только за счёт сброса сигнала на нулевую промежуточную частоту, с использованием метода обнаружения предложенного в [7] по рисунку 5, но при этом необходимо разбить одну АФАР на две подАФАР, что даёт снижение чувствительности в 2 раза из-за снижения коэффициента усиления антенн по отдельности.
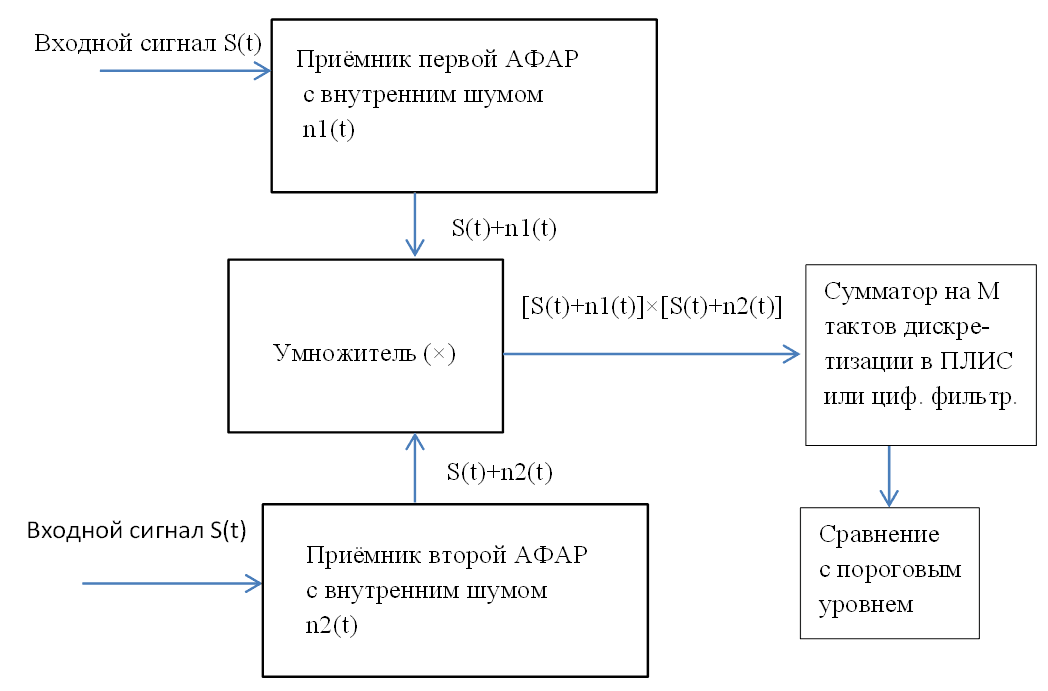
Рис. 5. Упрощённая функциональная схема выделения сигнала средствами РТР противника
В этом случае обнаружение будет проводиться при накоплении 4 импульсов с целью компенсации потерь от уменьшения коэффициента усиления антенн, при исключении фазы и отличий по частоте за счёт сложения значений по каналу синуса и косинуса с полосой в цифровом фильтре 10,4 МГц. Понятно, что можно поднять коэффициент усиления антенны средства РТР в 4 раза, но при этом размеры антенны будут достигать 1,12 м × 1,12 м, а это, с учётом мобильного средства передвижения, есть цель с достаточно большой эффективной поверхностью рассеяния (ЭПР) на фоне Земли. Такие объекты легко обнаруживаются с помощью ЛА, имеющих АФАР с функцией РЛС. Понятно, что скрытность сигнала от АФАР БПЛА можно повысить ещё больше, уменьшив мощность излучения сигнала вызова, например, до 0,01 Вт, что можно добиться, например, за счёт деления общей АФАР БПЛА на несколько подАФАР, что также будет показано ниже. Это естественно исключает определение сигнала вызова от БПЛА по одному или нескольким импульсам даже при использовании метода по рисунку 5. Однако нам важно, чтобы наш сигнал вызова был также принят абонентом.
Поэтому, определим приём радиосигнала абонентом на расстоянии Dц=20 км от БПЛА при излучении сигнала мощностью Рбпла=0,04 Вт и коэффициенте усиления антенны абонента как в системе связи для мобильных устройств «Iridium» Gа=0,5 (-3 дБ). При этом будем считать, что передача информации осуществляется символами, со скоростью передачи 41 Мбит/сек, и соответственно имеется накопление по коду при несущей частоте 2,4 ГГц (λц=0,1363 м). Коэффициент усиления антенны БПЛА в сочетании с наличием 2-х патч в одном радио-модуле из шестнадцати считаем равным Gбпла= 223,341 (23,5 дБ). При этом отношение сигнал/шум в приёмнике радио-модуля выбирается равным величине q=27 (вероятность ошибки 10-6-10-7). Здесь также k - это постоянная Больцмана, а Тш=600оК – шумовая температура. Отсюда вычислим необходимую полосу пропускания в радио-модуле по формуле:
 (3)
(3)
Это означает, что необходимо накопление 7 бит при скорости передачи в 41 Мбит/сек. Отсюда получается, что средство РТР противника, при попадании БПЛА в луч антенны РТР противника, обнаружит сигнал вызова от БПЛА при непрерывной длительности в 0,17 мксек (полоса 5,87 МГц) раньше, чем этот сигнал вызова будет обнаружен абонентом. Для того, чтобы избежать обнаружение средством РТР противника сигнала вызова от БПЛА необходимо использовать разбиение сигнала вызова во времени на коды длительностью, например, в 2 бит с использованием кода Манчестера со скважностью Q=2 и более с накоплением сигнала по коду, например Баркера, для исключения захвата по боковому лепестку корреляционной функции, по рисунку 6.
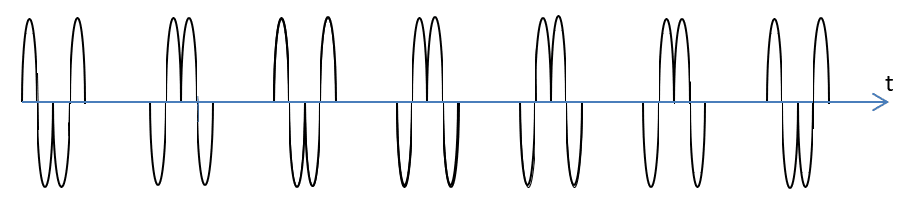
Рис. 6. Использование кода Манчестера в сочетании с кодом Баркера на 7 бит и скважностью Q=2
Это естественно увеличит время, требуемое на накопление при вызове в 4 раза, но может исключить обнаружение сигналов вызовов средствами РТР противника на дальности между БПЛА и РТР в 40 км. При этом при накоплении эквивалентная полоса пропускания для сигнала равняется 2,93 МГц (0,341 мксек с учётом кода Манчестера, но без учёта скважности, так как пропуски игнорируются при накоплении). Поэтому мы из расчёта эквивалентной полосы пропускания исключаем скважность Q=2. Однако при скважности увеличивается длительность кода ещё в 2 раза до 0,682 мксек (1,47 МГц), хотя в эти промежутки времени сигнала нет, а значит, нет и накопления. Преимущество в том, что наличие скважности ухудшает характеристики отношения сигнал/шум в средстве РТР противника, так как ему неизвестна используемая скважность и в фильтре будет происходить накопление шумов в Q1/2 наряду с накоплением сигнала. Кроме того, если в РТР противника используются цифровые фильтры с полосой в 10,4 МГц, то накопленный сигнал при 4 импульсах при скважности более двух упадёт до нуля. Отсюда потребуется использовать для РТР цифровые фильтры в 1,47 МГц с учётом скважности, однако, если считать полосу пропускания антенны РТР в 200 МГц [8], то при параллельной автоматической цифровой обработке потребуется 136 ПЛИС, а это требует большого энергопотребления и увеличивает массогабаритные характеристики. Ситуация для РТР противника будет хуже, если при вызове абонента используется скважность Q=10, с соответствующем накоплением в приёмнике абонента в течение времени в 3,41 мксек. В этом случае число ПЛИС, обеспечивающих цифровую фильтрацию, увеличивается до 680 при параллельной обработке с полосой пропускания 0,293 МГц. А это уже исключает использование такого средства РТР на БПЛА, и для обработки в лучшем случае надо использовать режим ретрансляции сигнала с АФАР БПЛА противника на наземное средство РТР противника, где возможно использование такого количества фильтров. Соответственно о мгновенной помехе не может быть и речи. Можно конечно для РТР использовать сочетание параллельного обнаружения с последовательным во времени обнаружением, однако параметры сигнала вызова могут меняться в зависимости от времени по заранее определённой программе и ситуации на театре военных действий (ТВД). В этом случае при изменении во времени, например, частоты сигнала устройство РТР может не идентифицировать этот сигнал как с того же самого БПЛА. А это приведёт к пропуску сигнала вызова от БПЛА средствами РТР противника, так как используется автоматический режим. Надо отметить, что при применении противником импульсных помех используется узконаправленный луч антенны, и это требует от средства РТР противника точное местоположение БПЛА связи, что также связано с временем разведки на угловое местоположение, которое также ограничено из-за перестройки параметров сигналов связи.
Соответственно сигнал вызова или ответа от абонента к БПЛА должен также придерживаться таких же параметров, так как мы учитываем, что для устройства РТР противника в качестве мобильного средства передвижения может также использоваться БПЛА, но соответственно с учётом литерного разделения по диапазонам частот. Таким образом, мы приходим к выводу, что использование в сигналах вызова и ответа скважности как в системах РЛС и кода Манчестера играет очень важную роль для обеспечения скрытности сигнала. Надо отметить, что скважность также применяется в протоколах связи в космических системах типа «Iridium» и «Globalstar» путём разделения на слоты в кадре по рисунку 1, но здесь идёт приём информации в каждом слоте непрерывно. Поэтому отличие в том, что мы используем разделение информации на биты с использованием кода Манчестера и скважностью между битами информации, а не в виде скважности за счёт слотов абонентов в режиме непрерывной информации. Такой вариант стал возможен благодаря тому, что энергетический потенциал для связи с помощью БПЛА из-за уменьшения дальности значительно выше. Как будет показано ниже, скважность необходима и для обеспечения согласования времени излучения от разных абонентов, которые находятся на разной дальности от БПЛА. Скважность позволяет также уменьшить воздействие импульсных помех короткой длительности.
Теперь определим, как влияет частота Доплера на обеспечение сокращения времени вызова с учётом кода. Пусть скорость БПЛА составляет 250 км/час (Vбпла=69,45 м/сек), несущая частота сигнала от БПЛА f=2,4 ГГц, отсюда вычислим доплеровскую частоту Fд по формуле:
 (4)
(4)
Это означает, что период изменения частоты Доплера составляет 1,12 млсек. Если длительность всего сигнала вызова будет составлять от 3,4 мксек до 100 мксек, то частота Доплера не будет влиять на накопление сигнала по коду.
Так как по формуле (3) кодовый сигнал вызова с накоплением для обнаружения составляет при дальности в 20 км от БПЛА до абонента 7 бит (0,17 мксек), то будем считать, что в целях скрытности мы используем скважность равную 3 через каждые 2 бита (код Манчестера). При этом сам код вызова будут определяться через 128 символов информации (аналог кодирования в системе связи «Globalstar»). Отсюда общая длина кода составит 128 бит×2(код Манчестера)×3(скважность)=768.Такая длина кода находится в промежутке между длиной кода ГЛОНАСС в 512 бит и длиной кода GPS в 1024 бита. Этот код вызова может меняться в зависимости от времени, а также и по частоте и скважности внутри кода. Причём необходимая информация об изменениях может поступать в конце сеанса связи с каждым абонентом. Здесь мы учитываем специфику работы на ТВД, где связь с абонентами происходит довольно часто и требуется обеспечить высокую помехозащищённость. В итоге общая длительность кода вызова составляет 1/(41 МГц)×768 бит=18,732 мксек. Соответственно общее время поиска по коду вызова с получением символьной синхронизации составит время 18,732 мксек ×768 бит бит×2=28,77 млсек. Здесь мы учитываем, что символьная подстройка будет осуществляться в ПЛИС со сдвигом во времени только на половину одного бита, а не на бит. Таким образом, подстройка по символам и частоте по сигналу вызова произойдёт через 28,77 млсек. Если сравнивать с форматом кадра «Iridium» по рисунку 1, то это меньше 4-х слотов на передачу 4×8,28=33,12 млсек и чуть больше времени отводимого для преамбулы Simplex (20,32 млсек). То есть, на поиск и обнаружение требуется время на преамбулу Simplex и один слот. Можно отметить, что время на код составляет 18,732 мксек, это меньше, чем время в 100 мксек, что обеспечивает накопление кода без разрушения его от частоты Доплера из-за смены фазы. Однако, если первоначально использовать подстройку по частоте Доплера перед символьной синхронизацией по коду (у нас время на подстройку по частоте Доплера порядка 100 мксек [1]), то длительность вызова с увеличением скважности можно увеличить, что сделает невозможным обнаружение сигнала вызова. Конечно, это связано с увеличением времени вызова, но так как мы определили время вызовов с интервалом в 2,1 секунды, то на вызов и ответ можно использовать кадр длительностью в 90 млсек (по 45 млсек), что конечно уменьшит поток информации при связи только в 0,1 раз. Ситуация для вызовов и ответов в момент поиска и обнаружения улучшится, если использовать режим дуплекса, когда запросные и ответные сигналы проходят по каналу промежуточной частоты, где длительность кода на приём и ответ может быть существенно увеличена. Информация для связи передаётся уже на высокой несущей частоте с направленной антенной, по данным от канала на промежуточной частоте с всенаправленной антенной.
Надо отметить, что мы рассмотрели вариант вызова и ответа, когда луч АФАР БПЛА направлен в сторону абонента. Однако луч АФАР имеет сектор углового обзора. Исходя из [10] коэффициент усиления антенны может быть вычислен по формуле:
G=35500/(αаз×βум). (5)
Подставив значение G=GАФАР=223,341 в формулу (4) с учётом того, что у нас длина антенны в 2 раза больше, чем ширина по рисунку 2 (56 см×28 см) имеем сектор углового обзора луча αаз=8,90,βум=17,80. Далее будем считать, что на дальности в 20 км от БПЛА до абонента сектор обзора должен соответствовать длине в 20 км по линии соприкосновения. Это соответствует сектору обзора по азимуту ±30 градусов. В этом случае мы должны иметь 6,74 положений луча АФАР по азимуту. Таким образом, всё время необходимое для вызова составит 6,74×28,77 млсек =193,91 млсек. Это конечно уже значительно уменьшит время для передачи информации. Поэтому в режиме вызова и ответа на вызов при такой длительности кода в 128 бит желательно использовать многолучевой режим с использованием подАФАР, как это будет показано несколько ниже. Возможен также вариант сокращения длительности кода вызова со 128 бит до 7-24 бит с учётом формулы (3). Будем предполагать, что 12 бит это позывной код БПЛА (для идентификации реально можно обойтись и 3 битами), а ещё 12 бит (при обслуживании 2500 абонентов), это код вызываемого пользователя. Отсюда общая длина кода при 24 бит составит 24 бита×2 (код Манчестера)×3(скважность)=144. В итоге общая длительность кода вызова составляет 1/(41 МГц)×144 бит=3,51 мксек. Общее время поиска по коду вызова с получением символьной синхронизации составит время 3,51 мксек × 144 бит×2=1011,51 мксек. Таким образом, всё время необходимое для вызова составит 6,74×1,0115 млсек=6,817 млсек. То есть, при упрощённом коде вызова мы имеем сокращение времени. Отметим, что один слот для «Iridium» по рисунку 1 соответствует временному интервалу в 8,28 млсек. Следовательно, если исходить из формата «Iridium» для слота информации мы имеем на передачу дополнительной информации в режиме вызова в (8,28 млсек-6,817 млсек)/3,51 мксек=416 бит. Соответственно, если использовать запрос от БПЛА и ответ на запрос от абонента через 90 млсек (а не через 2,1 сек), то при скорости в 250 км/ч, через секунду, БПЛА переместится только на 69,45 м/сек×0,09 сек=6,25 м. С учётом того, что при символьной синхронизации используется символ в 1/(41 МГц)=0,024 нсек, то при скорости света - это время распространения сигнала на 7,31 м. Это означает, что нарушения в символьной синхронизации, между абонентом и БПЛА в зависимости от скорости не произойдёт. Если для первоначального запроса и ответа использовать промежуток времени преамбулы Simplex, то время на дополнительную информацию будет ещё больше (20,32 млсек/2-6,817 млсек)/3,51 мксек=952 бит, что позволяет использовать дополнительное кодирование информации. При необходимости промежуток времени «Simplex» на следующем цикле после поиска и обнаружения вызова и ответа можно использовать также для передачи дополнительной служебной информации для абонентов. Отсюда посчитаем, какое количество пользователей может обслужить АФАР БПЛА при передаче информации одновременно. При этом будем исходить из того, что, так как подстройка по частоте и по коду осуществлена, то главным условием становится передать как можно больше информации за короткий срок в течение одного слота при обслуживании как можно большего количества абонентов. Чтобы передать как можно больше информации за один слот нам необходимо задействовать максимальную скорость передачи в 41 Мбит/сек при соответствующей мощности передатчика АФАР. Если исходить из формулы (3) то на дальности до абонента в 20 км при полосе пропускания в 60 МГц нам необходимо обеспечить общую мощность передатчика АФАР БПЛА в 0,4 Вт. Это в 10 раз больше, чем было в режиме вызова. Это естественно снижает помехозащищённость и из этого следует, что для исключения повышения мощности необходимо увеличивать коэффициент усиления антенны пользователя, то есть, абонент также должен иметь антенну из патч направленного действия, например, из 2-х патч, как это есть в предлагаемом радио-модуле по рисунку 7.
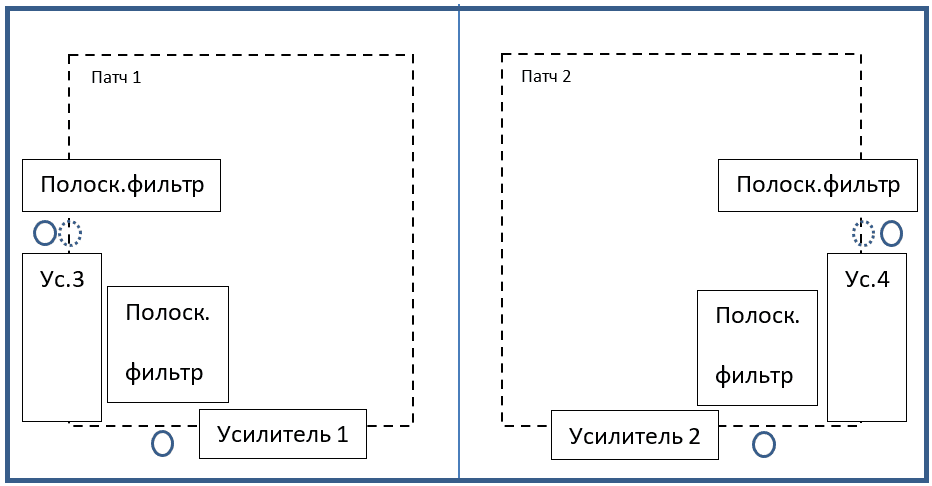
Рис. 7. Предлагаемый радио-модуль с расположением элементов патч и усилителей с учётом согласования за счёт полосковых фильтров, расположенных на многослойной плате антенны
При этом конструкция радио-модуля показана на рисунке 8.
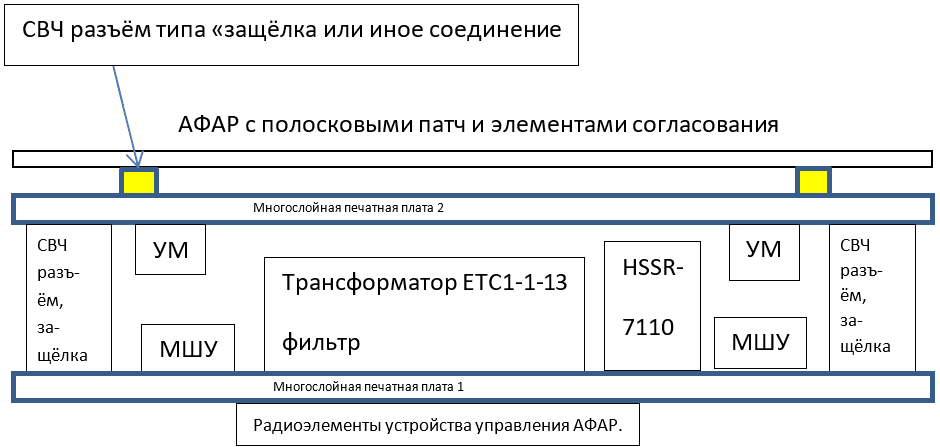
Рис. 8. Конструкция с боку радио-модуля
Вид многослойной печатной платы № 1 радио-модуля показан на рисунке 9.
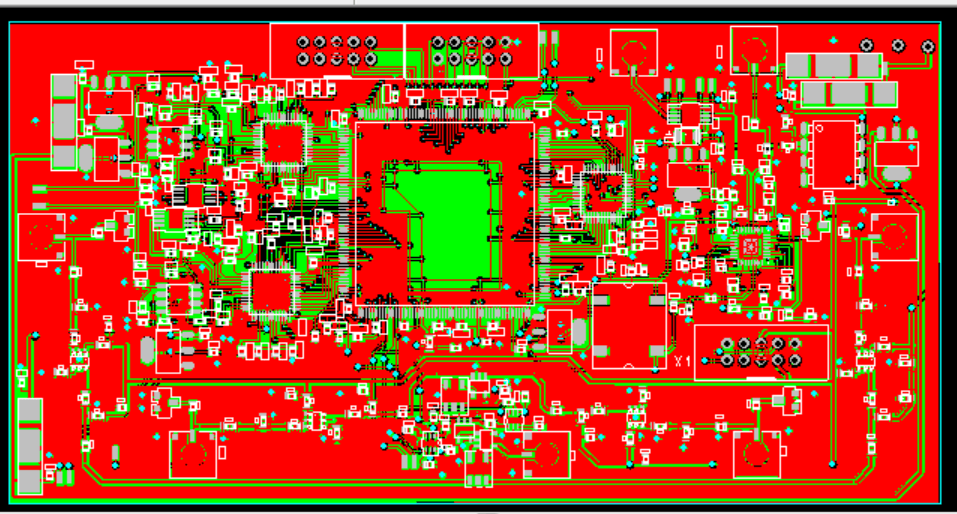
Рис. 9. Вид многослойной печатной платы № 1
Вид многослойной печатной платы № 2 радио-модуля показан на рисунке 10.
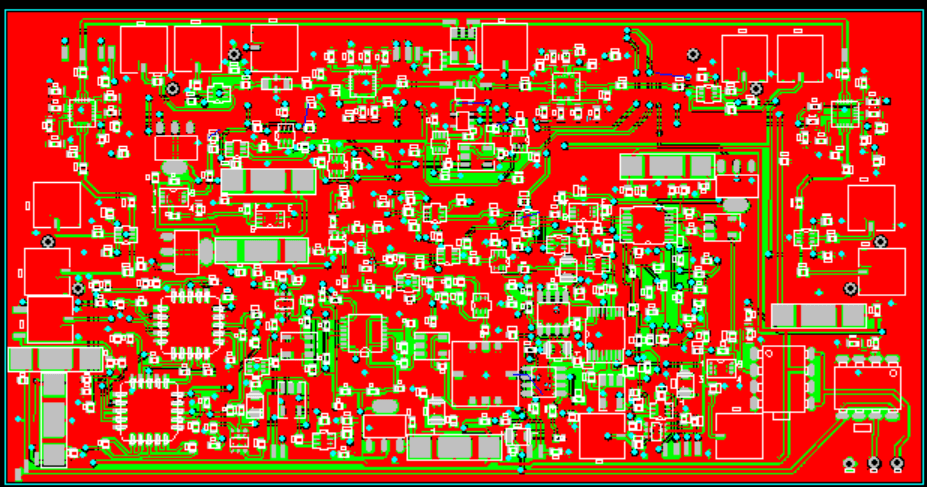
Рис. 10. Вид многослойной печатной платы № 2
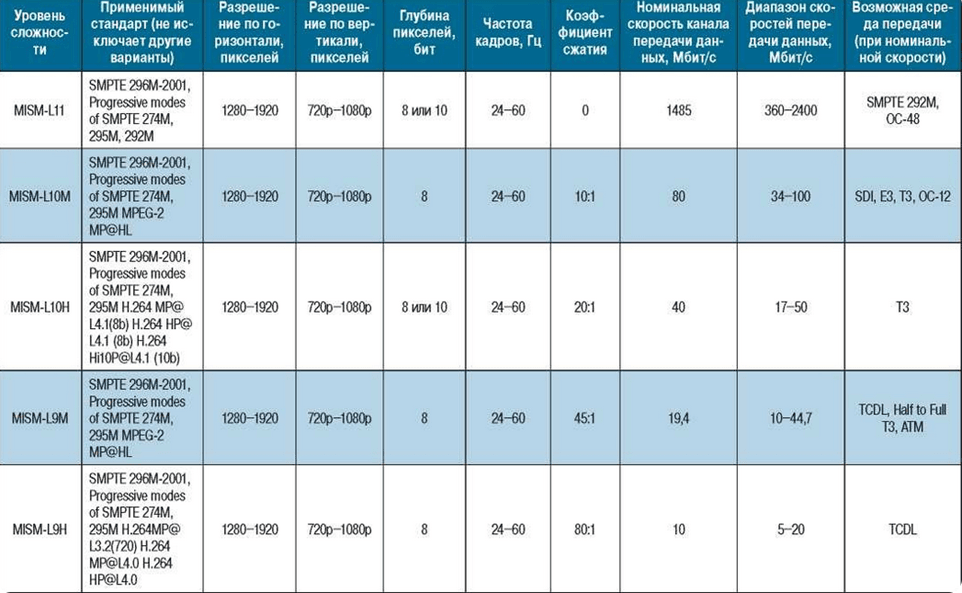
В этом случае по сравнению с вариантом антенны [8] коэффициент усиления может достигать 11,5 дБ (14,1 раз). При этом априорное направление антенны соответственно должно быть в сторону БПЛА и при вертикальном расположении радио-модуля сектор обзора его антенной составит необходимые ±30 градусов, что даёт видимость 20 км по линии соприкосновения, также как для сектора обзора БПЛА. Соответственно в этом случае приём сигнала средством РТР противника будет не по первому боковому лепестку, а по заднему, который имеет коэффициент усиления не в 18 дБ меньше, а в 40 дБ меньше, как это видно из рисунка 4. В этом случае по формуле (3) при подстановке вместо Gа=0,5 значения Gа=14,1 мы получим возможную полосу пропускания для связи между абонентом и БПЛА в 165 МГц. Если использовать режим QAM, то снижается чувствительность в 4 раза, но мы получим возможность передачи сигнала, например, в 41 Мбит/сек×3=123 Мбит/сек. При этом мощность излучения от БПЛА, и обратно от абонента, останется на уровне 0,04 Вт. Это собственно соизмеримо с передачей информации в режиме Интернет для таких космических систем связи как «Starlink». Кроме того, при подключении к нашему устройству оптико-электронного устройства мы обеспечиваем уровень сложности при цифровом изображении MISM-L10M в соответствии таблицей.
Таблица
Стандарты по скорости передачи информации от БПЛА при высоком разрешении оптико-электронного изображения
Надо отметить, что в предлагаемом радио-модуле предусмотрена возможность изменения поляризации во времени (вертикальная, горизонтальная, круговая поляризация, как левая, так и правая), что позволяет ещё больше повысить скрытность от средств РТР противника, и уменьшает влияние помех. Иными словами, переход на предлагаемые радио-модули позволяет качественно изменить информацию о происходящих событиях на ТВД не только посредством радиосвязи, но и визуального оптико-электронного наблюдения.
Что касается радиосвязи в режиме ТЛФ, то далее будем исходить из того, что в течение 90 млсек мы должны обеспечить в одном слоте для одного абонента на передачу 414 бит как в «Iridium». При скорости передачи в 41 Мбит/сек мы обеспечим такую передачу в 414 бит за 10,1 мксек. Здесь, мы не рассматриваем вариант возможного применения сигнала QAM, который в три раза может повысить скорость передачи (до 13,8 кбит/сек) при увеличении мощности в 4 раза. Напомним, что для «Globalstar» скорость передачи информации в многопользовательском режиме 9,6 кбит/сек. Соответственно, если исходить из скрытности обнаружения и давать биты информации при коде Манчестера со скважностью 10, то на одного пользователя будет приходиться 202 мксек по рисунку 11.
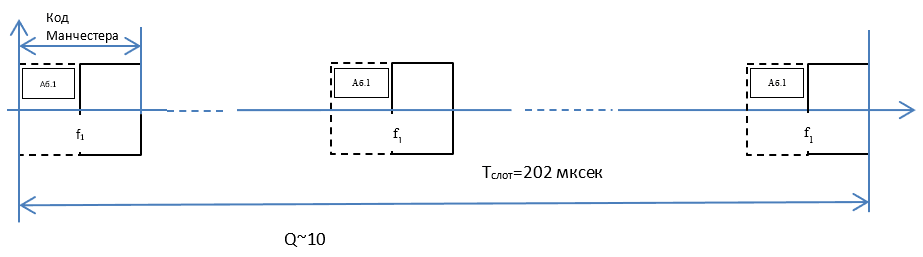
Рис. 11. Временная диаграмма для одного абонента при скорости передачи в 4,6 кбит/сек с использованием кода Манчестера и скважности порядка 10 для помехоустойчивости
Таким образом, в одном слоте за 8,28 млсек можно уместить последовательно 40 пользователей. Одновременно осуществляется коррекция по частоте Доплера с помощью ФАПЧ. С учётом четырёх слотов на передачу мы получим общее количество обслуживаемых пользователей одновременно в 160 абонентов. Соответственно мы можем передавать сообщения для каждого абонента не со скважностью 10, а со скважностью порядка 100 растянув всё время приёма для каждого пользователя до 2 млсек, чередуя через 202 мксек передачу битов информации для каждого из 10 пользователей по рисунку 12, что фактически равносильно кодированию.
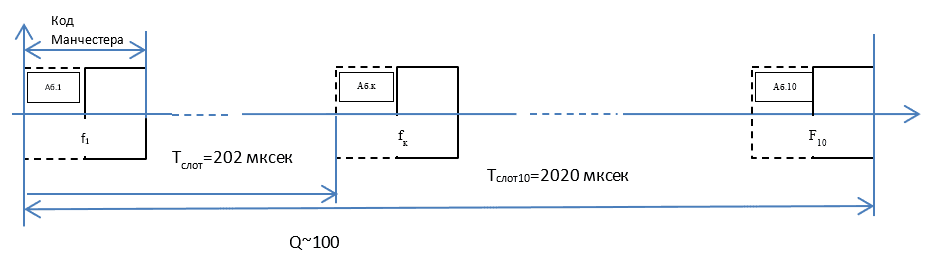
Рис. 12. Временная диаграмма на 10 абонентов с длительностью слота для каждого абонента в 2020 мксек и скважностью повторения сигнала порядка Q=100 с использованием разделения по частоте
Это заставляет средство РЭБ «размазывать» сигнал помехи по всему возможному спектру частот. Следует отметить, что использование скважности позволяет экономить среднюю энергию на передачу и не позволяет средству РТР противника иметь устойчивое превышение сигнала над порогом чувствительности. Напомним, что такой способ стал возможен благодаря тому, что дальность от пользователя до БПЛА значительно меньше, чем дальность от КА до абонента. Так как самый эффективный способ, исключающий обнаружение и постановку помехи это переключение несущей частоты, то оценим возможности перестройки для каждого пользователя в АФАР БПЛА. Отметим, что для изменения частоты на 100 МГц, например, от 3070 МГц до 2970 МГц в синтезаторе частоты ADF4350 в лучшем случае требуется время в 450 мксек по рисунку 13.
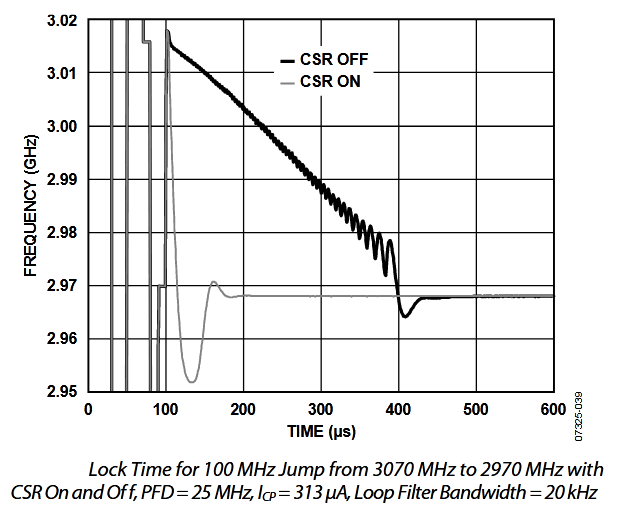
Рис. 13. Перестройка частоты в синтезаторе ADF4350
Если при работе радио-модуля в качестве мобильного устройства связи это вполне допустимо, так как частота неизменна в течение 2020 мксек, а между приёмом и передачей может быть интервал также не менее 2 млсек (исходя из наличия 4-х слотов), то для режима передачи при использовании однолучевого АФАР БПЛА в качестве общего средства связи это недопустимо, так как мы должны изменять несущую частоту за 202 мксек, если мы используем режим поочерёдной последовательной передачи битов информации для каждого пользователя из десяти со скважностью 100. Поэтому, чтобы обеспечить скрытность мы можем использовать в каждом слоте до 16 несущих частот с учётом того, что у нас в АФАР есть 16 радио-модулей и в каждом из них есть синтезатор частоты, например, ADF4350. Время переключения ключа, например, RF3024 составляет 40 нсек. Понятно, что при полосе пропускания АФАР БПЛА в 200 МГц мы имеем различие по частотам 200 МГц/16=12,5 МГц. В соответствии с этим мы можем либо увеличить количество пользователей за счёт параллельного излучения, либо уменьшить скважность за счёт обеспечения помехоустойчивости из-за смены несущей частоты с указанием такого режима в преамбуле «Simplex». Понятно, что при рассмотрении режима скрытности для средств РТР мы не учитывали ещё тот факт, что луч АФАР РТР также обязан осуществлять поиск в соответствующем угловом секторе. Здесь попадание средства РТР противника на луч АФАР БПЛА будет ещё меньше, так как передача сменяется на приём со скважностью Q=2 через 8,28 млсек, и от этого вероятность обнаружения уменьшается за счёт количества угловых положений луча АФАР РТР.
Кроме того, время, в течение которого нет передачи от АФАР, благодаря скважности, может быть использовано для ответа от абонентов. Предположим, что абоненты по дальности в максимальном случае отличаются на 10 км по глубине фронта от линии соприкосновения. В этом случае задержка по ответу по дальности составит при сигнале туда и обратно порядка 20 км, а по времени это 66,6 мксек. Иными словами, у нас есть время после передачи принять сообщение как минимум от одного или нескольких абонентов по такому же принципу, как и при передаче по рисунку 10 с той же скважностью порядка 100. А это означает, что мы в одном слоте можем объединить слоты на приём и передачу, что увеличит количество пользователей одновременно до 80, а при четырёх слотах до 320. Понятно, что данные о местоположении абонентов и БПЛА позволяют достаточно точно выставлять синхронизацию сигналов по времени и тогда задержки во времени будут учтены без наличия пропусков по времени или будут значительно меньше. Для сравнения отметим, что в КА «Iridium» используется 6 АФАР в режиме кругового обзора, причём одна АФАР способна одновременно обслужить 8 лучей × 4 абонента (последовательно) × 6 абонентов (параллельно)=192 пользователя. Так как у нас есть запас по мощности, то мы также можем использовать (как это будет показано несколько ниже) при передаче многочастотный режим с делением мощности между пользователями и разделением по частоте. Ещё раз отметим, что у нас в АФАР 16 радио-модулей и с учётом энергетического потенциала может применяться многолучевой режим, как это будет показано несколько ниже. В каждом радио-модуле свой синтезатор частоты, и количество сигналов в многочастотном режиме может доходить до 16 по количеству лучей и понятно, что в этом случае время излучения от БПЛА может подбираться индивидуально, что сокращает интервалы между слотами. Для сравнения в системе связи «Globalstar» используется 13 частот одновременно.
При приёме сигналов на БПЛА от абонентов мы также можем использовать помимо последовательного режима во времени и параллельный режим приёма, что достаточно выгодно при условии того, что каждый абонент имеет в своём радио-модуле до 4-х усилителей мощности. Это может обеспечить излучение по мощности в 4 Вт и более, с обеспечением принятия сигналов со скоростью, например, 41 Мбит/сек. Понятно, что средства РТР могут обнаружить абонента по такому мощному сигналу и навести на источник излучения квадрокоптер, или накрыть артиллерийским снарядом. Однако в силу того, что у нас есть режим дуплекса, то пользователь не обязательно должен находиться там, где установлен мобильный радио-модуль. Это исключает поражение абонента, так как связь может вестись в режиме ретрансляции по промежуточной частоте от другого радио-модуля.
Если идёт многочастотная передача от АФАР БПЛА, то наличие 4-х усилителей мощности в каждом радио-модуле позволяет достигать необходимой мощности, и не входить в нелинейный режим работы усилителя с искажением сигналов при многочастотном режиме. При этом не требуется повышение отношения сигнал/шум за счёт соответствующего удлинения времени приёма с накоплением.
При расположении радио-модулей как показано на рисунке 14, мы можем одновременно иметь до 8 подАФАР с управлением луча по азимуту, что исключает в режиме вызова обзор на 7 положений и это позволяет увеличить код вызова с 24 бит до 64 бит при времени поиска и обнаружения до символьной синхронизации за 7,193 млсек. Это естественно повышает помехозащищённость и фактически сравнивается с кодом в 128 бит, который используется в «Globalstar», если учесть, что у нас один бит информации равен коду Манчестера. Надо отметить, что использование кода Манчестера с переменной скважностью может значительно уменьшить уровень боковых лепестков корреляционной функции, что повышает достоверность обнаружения сигнала при поиске. Иными словами предлагаемый протокол связи обладает лучшей помехозащищённостью и достоверностью при обнаружении сигнала.
Соответственно управление лучом по углу места при 8-ми лучах АФАР не требуется, так как сектор обзора по углу места составляет 34 градуса, что на дальности БПЛА от абонента в 20 км даст обзор по высоте в 10 км.
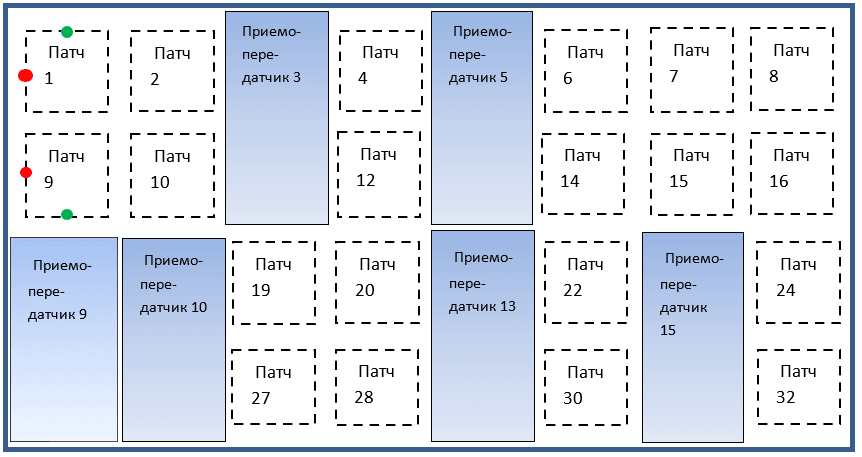
Рис. 14. Расположение радио-модулей для режима вызова с исключением обзора на 7 положений луча
Ещё раз отметим, что такой режим возможен благодаря тому, что в каждом из 16 радио-модулей у нас на многослойной плате 1 по рисунку 8 находится синтезатор частоты типа ADF4350. При этом один синтезатор частоты в подАФАР состоящей из двух ради-модулей используется при передаче сигнала, а другой синтезатор при приёме сигнала, в режиме дуплекс, как это будет показано ниже.
Разберём сам принцип работы АФАР БПЛА в многолучевом режиме. При этом будем исходить от работы отдельного радио-модуля по функциональной схеме на рисунке 15, с учётом того, что предлагаемый радио-модуль также имеет диаграмму направленности и может использоваться как подАФАР. То есть, 16 радио-модулей образуют 16 подАФАР, и могут работать самостоятельно в системе связи с обслуживанием абонентов.
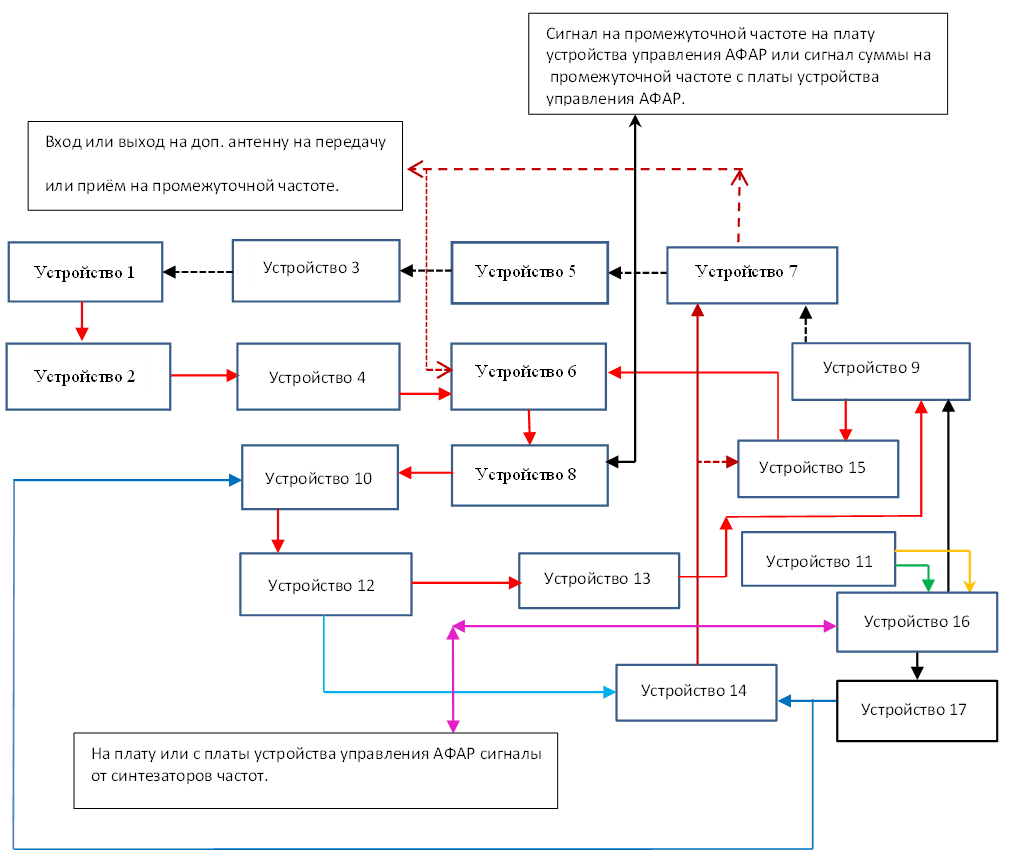
Рис. 15. Функциональная схема предлагаемого радио-модуля
Радио-модуль состоит из следующих устройств. Устройство 1 представляет собой патч-антенны с наличием согласующих элементов по коэффициенту стоячей волны (КСВ) и полосковых линий для достижения оптимальной круговой поляризации на соответствующих слоях многослойной печатной платы АФАР. Понятно, что альтернативы патч-антеннам в диапазоне от 250 МГц до 6 ГГц нет в силу обеспечения наибольшей ЭПР [7], и вопрос лишь касается обеспечения такого конструктивного решения на патч, которое позволяло бы обеспечить все виды поляризаций для повышения помехозащищённости с минимальными энергетическими потерями и наибольшей чувствительностью. Это достигается за счёт элементов согласования в многослойной печатной плате АФАР, выбора диэлектрика и симметричного расположения усилителей мощности (УМ), а также малошумящих усилителей (МШУ) так, как показано на рисунке 7, причём, чтобы нагрев УМ не влиял на МШУ эти усилители разнесены на платы № 2 (рис.10) и 1 (Рис.9), как показано на рисунке 8 с видом сбоку. Сигнал с патч-антенн поступает на устройство 2, которое состоит из 4-х малошумящих усилителей (МШУ), расположенных соответствующим образом на многослойной печатной плате № 1 по рисунку 7 (аналогичное размещение УМ, но на плате № 2). При приёме сигналы с устройства 2 от 4-х МШУ поступают на устройство 4 (расположено на плате № 1). Устройство 4 на рисунке 15 представляет собой сумматоры от 4-х сигналов с МШУ (для расширения диапазона частот возможен вариант выполнения сумматоров и делителей на трансформаторах), а также фазоинвертор на 180 градусов с использованием ключей и трансформатора для обеспечения круговой поляризации как правой, так и левой. Кроме того, для обеспечения одинаковой фазы в двух патч, усилители, расположенные с двух противоположных крайних сторон этих патч, возбуждаются в противофазе от одного трансформатора, но с разных выводов вторичной обмотки. Это даёт синфазный сигнал электромагнитных полей в горизонтальной плоскости. Далее суммарный сигнал поступает на устройство 6 (плата № 2). Устройство 6 – это МШУ со смесителем, где происходит смещение радиосигнала на промежуточную частоту порядка 300-400 МГц. Одновременно в устройстве 9 (балансный модулятор (БМ) на плате № 2), на основе синтезатора частоты 11 (верхняя сторона платы № 1) через ключи устройства 16 (находятся на нижней стороне платы № 1, там, где располагаются радиоэлементы управления, с подключением через металлизированные отверстия) формируются гетеродинная частота или несущая частота сигнала с информацией. Если радио-модуль используется отдельно, в качестве мобильного устройства связи абонента, то металлизированные отверстия входа и выхода от управляющей платы АФАР соединяются на верхней стороне платы № 1 через разделительные конденсаторы соответствующей величины. Соответственно, при режиме АФАР сигнал информации на несущей частоте, через ключевое устройство 16, поступает от управляющей платы АФАР, что будет показано ниже. В БМ (устройство 9 на плате № 2) мы имеем необходимое изменение фазы для многолучевого режима АФАР, либо происходит модуляция информацией при отдельной работе каждого радио-модуля. С этой целью сигналы изменения фазы или информации поступают от ПЛИС (устройство 12 на верхней стороне платы № 1) через устройство 13 (цифро-аналоговый преобразователь (ЦАП) на верхней стороне платы № 1). При этом, устройство 9 представляет собой не только балансный модулятор, но в него входят также усилители с ключами, для обеспечения переключения сигнала с его выхода, либо на смеситель устройства 6 при приёме, либо на предусилитель (устройство 7 на плате № 2) для передачи информации или сигнала помехи на несущей частоте, а также с устройства 7 через ключ осуществляется подключение к выходу дополнительной низкочастотной антенны для обеспечения режима дуплекса. Таким образом, при приёме сигнала информации, сформированная гетеродинная частота сигнала от устройства 9 через ключ (устройство 15 на плате № 2) поступает на смеситель в устройстве 6. Далее сигнал после переноса на промежуточную частоту порядка 300 МГц - 400 МГц поступает на устройство 8 (плата № 2). Это устройство 8 состоит из предусилителя после смесителя в устройстве 6, фильтра для исключения сигнала на несущей частоте и частоте гетеродина, логарифмического усилителя на 100 дБ и двух ключей переключения. Ключи устройства 8 дают сигнал, либо на вход устройства управления АФАР (нижняя часть многослойной печатной платы № 1), для использования сигнала промежуточной частоты в режиме АФАР, либо на вход смесителей (устройство 10 на плате № 2) для формирования сигналов в квадратуре на нулевой промежуточной частоте (в режиме радиоуправления БПЛА и связи). То есть, ключи в устройстве 8 задействованы таким образом, что при использовании в режиме мобильного устройства радио-модуля сигнал с выхода логарифмического усилителя сразу поступает на балансные усилители устройства 10. В режиме АФАР с помощью ключей передача сигнала промежуточной частоты осуществляется через СВЧ разъём типа «защёлка» на верхнюю часть платы № 1, а далее сигнал через металлизированное отверстие (или СВЧ кабель) поступает на нижнюю часть платы № 1. Кроме того, в режиме АФАР при приёме, в устройстве 8 предусматривается, через ключи на управляющей плате АФАР обратное поступление суммарного сигнала промежуточной частоты с учётом сложения фаз от всех радио-модулей АФАР. В этом случае промежуточный суммарный сигнал также через отдельное металлизированное отверстие поступает с нижней части платы №1 на верхнюю часть, и далее через соответствующий СВЧ разъём типа «защёлка» поступает в устройство 8, и через ключи этого устройства на балансные смесители устройства 10. Иными словами, по сравнению с исполнением радио-модуля для абонентов, отличие в использовании в режиме АФАР касается дополнения двух ключей в плате № 2 (устройство 8). Одновременно в плате № 1, сигналы в противофазе от синтезатора частоты поступают не через разделительные конденсаторы на БМ (устройство 9 на плате № 2) и делитель частоты (устройство 17 на плате № 1), а через металлизированные отверстия на контактах удалённых в системе АФАР разделительных конденсаторов. Через металлизированные отверстия сигналы поступают на ключи устройство 16 на обратной стороне платы № 1, где находятся радиоэлементы управляющей платы.
Данный режим АФАР может использоваться и для обеспечения обработки сигналов при параллельном многочастотном приёме сигналов от абонентов, так как вторые гетеродинные сигналы на промежуточной частоте, поступающие на балансные смесители устройства 10, могут иметь в каждом радио-модуле своё значение. В этом случае, например, при параллельном многочастотном режиме при приёме сигналов в 16 несущих частот подстройка по частоте Доплера осуществляется не на нулевой промежуточной частоте, а на промежуточной частоте порядка 15-30 МГц с подстройкой внутри ПЛИС при потоке информации в 5-10 Мбит/сек (более подробно это рассмотрено несколько ниже). Практически это сравнивается с вариантом с потоком в 40 Мбит/сек, но для 4-х параллельных несущих частот. Для сравнения отметим, что в КА «Iridium» используется приём 6 несущих частот, но с потоком в 50 кбит/сек. Иными словами использование промежуточной частоты в предлагаемом радио-модуле имеет 4-х кратное назначение: для автономного режима работы, для режима АФАР, для многочастотного режима, и для режима дуплекса. При автономной работе радио-модуля ПЛИС с ЦАП (устройство 12 и 13) используются для фазовой автоподстройки (ФАПЧ) и формирования сигнала информации в режиме связи и радиоуправления. В режиме АФАР, ПЛИС с ЦАП (устройство 12 и 13) в радио-модуле используются для изменения фазы луча АФАР по информации от дополнительной платы устройства управления АФАР (нижняя часть платы № 1). В этом режиме, как уже отмечалось выше, при приёме сигналов абонентов в режиме разделения по времени, от устройства управления АФАР поступает суммарный сигнал на промежуточной частоте с учётом сдвига фаз в смесители в устройстве 10 на плату № 2. На гетеродинные входы смесителей (устройство 10 на плате № 2) с учётом деления частоты на основе делителей на 2 (они также находятся в устройстве 10 для получения сигналов в квадратуре), от устройства 17 (представляет собой делитель частоты (на 4 или 3)) поступает сигнал на частоте порядка 600-800 МГц. Таким образом, обеспечивается перенос на нулевую промежуточную частоту сигнала от одного из абонентов с промежуточной частоты в 300 - 400 МГц. Надо отметить, что на устройство 17 (делитель частоты на плате № 1) через устройство 16 (это ключи, которые находятся на обратной стороне многослойной печатной платы № 1 (рис.16), при совмещении печатной платы № 1 с платой устройства управления АФАР в едином модуле) осуществляется выбор синтезатора частоты от радио-модулей АФАР. Сигнал информации, смещённый на нулевую промежуточную частоту через АЦП поступает в ПЛИС (плата № 1), где осуществляется обработка сигнала с его отделением от других сигналов с использованием кода и полосы пропускания. Так как, важно не только принять сигнал от абонента, но и передать его по назначению, например, на другой БПЛА или КПУ, то отсюда следует необходимость режима дуплекса. В этом случае передача сигнала на высокой частоте сопровождается одновременным приёмом на низкой (промежуточной частоте), и наоборот, приём на высокой частоте сопровождается передачей на низкой частоте через дополнительную низкочастотную всенаправленную антенну. Для этого дополнительно необходимо обеспечить модуляцию информацией сигнала на промежуточной частоте при передаче от ПЛИС (плата № 1) и наличие самой частоты сигнала. С этой целью используется устройство 14 (находится на плате № 2), это тоже балансный модулятор (БМ), который даёт обеспечение режима передачи информации на промежуточной частоте в режиме дуплекса от ПЛИС (плата № 1), когда на высокой несущей частоте идёт приём информации. При приёме на промежуточной частоте также используется балансный модулятор в устройстве 14, где гетеродинным сигналом является сигнал от синтезатора частоты устройства 11 с подстройкой по частоте Доплера от сигналов с ПЛИС (плата № 1). Более подробно работа радио-модуля в режиме дуплекса рассмотрена в [5]. Собственно сигналы информации на промежуточной частоте обеспечивают связь БПЛА с КПУ и другими БПЛА, но возможен вариант связи и с абонентами (например, в режиме обнаружения и вызова), что также повышает помехозащищённость. Как уже отмечалось выше, чтобы обеспечить многочастотный параллельный вариант для абонентов, в режиме передачи необходимо задействовать те синтезаторы частоты в радио-модулях, которые не используются при приёме информации от абонентов. Здесь сигнал с синтезатора частоты радио-модуля через ключи устройства 16 поступает на соответствующий балансный модулятор (Рис.16) на плате устройства управления АФАР (нижняя часть платы № 1). То есть, сигналы с синтезаторов частоты подаются через ключи на соответствующие балансные модуляторы (БМ) на управляющей плате АФАР. Ещё раз отметим, что при работе радио-модулей в автономном режиме мы имеем 16 каналов связи на приём и передачу. Для приёма информации на 16 несущих частотах в режиме одного луча АФАР после первичного переноса от одного общего гетеродинного сигнала осуществляется перенос в балансных смесителях устройства 10 не на нулевую промежуточную частоту, а на частоту порядка 15,375- 30,75 МГц (тактовая частота дискретизации 123 МГц). В этом случае подстройка по частоте Доплера осуществляется внутри ПЛИС (устройство 12) с получением информации порядка 5-10 Мбит/сек для каждого абонента. Иными словами, мы пожертвовали скоростью приёма информации за счёт использования увеличения коэффициента усиления в однолучевом режиме. Но, как отмечалось выше, мы всё равно имеем выигрыш, так как данный режим эквивалентен передаче одновременно 4-х несущих частот с общим потоком для каждого в 40 Мбит/сек, что эквивалентно приёму в 160 Мбит/сек на одной частоте.
Однако, оценим возможности скорости приёма информации в помехозащищённом варианте для варианта автономного режима радио-модуля с коэффициентом усиления антенны из 2-х патч, что составит 11,5 дБ (14,1 раз). Соответственно будем считать, что и радио-модуль абонента также направлен в сторону БПЛА и тоже даёт усиление антенны в 11,5 дБ. По формуле (3) вычислим необходимую возможную полосу пропускания при мощности радио-модуля всего 0,04 Вт. В этом случае она равняется 10,45 МГц, что соизмеримо со скоростью передачи информации в 10 Мбит/сек. То есть, при помехозащищённом варианте связи, повышать мощность излучения в 4 раза с увеличением скорости передачи в 41 Мбит/сек нежелательно. Исходя из скорости передачи в системе связи «Iridium» мы также можем использовать разделение во времени в каждом радио-модуле для приёма абонентов. При скорости передачи информации в 5,2 Мбит/сек с учётом кода Манчестера мы будем иметь передачу 414 бит для каждого пользователя в течение 90 млсек за 79,6 мксек. С учётом скважности Q=10 для скрытности от средства РТР или использования кодирования в 10 бит, на одного пользователя будет уходить 796 мксек. В итоге на один слот в 8,28 млсек будет приходиться не менее 10 абонентов. С учётом наличия 4-х слотов получим, что один радио-модуль способен обслужить 40 пользователей. В итоге при 16 радио-модулях количество обслуживаемых абонентов составит 640. Если количество пользователей невелико, то можно применить дополнительное кодирование.
Следующий вариант – это применение радио-модулей в режиме АФАР с 8-ми лучами одновременно. В этом случае, в управляющей плате (функциональная схема на рисунке 16) для режима передачи информации при многолучевом варианте (8 лучей), помимо ПЛИС с ЦАП и балансным модулятором для однолучевого варианта АФАР, необходимо дополнительно предусмотреть ещё 7 ПЛИС с ЦАП и балансными модуляторами. Это обеспечивает передачу информации на несущих частотах в каждом луче из 8-ми подАФАР. В качестве синтезатора частоты на несущую частоту передачи выбирается один синтезатор частоты одного радио-модуля из двух, образующих подАФАР. При переключении на приём, в качестве гетеродинного сигнала на один из восьми БМ находящихся в управляющей плате АФАР используется оставшийся синтезатор частоты в модуле подАФАР, который в момент передачи на высокой несущей частоте используется в качестве гетеродинного сигнала промежуточной частоты в режиме дуплекса. Соответственно время переключения с приёма на передачу здесь при использовании ключей RF3024 не превышает 40 нсек.
В случае приёма сигнала в 41 Мбит/сек на высокой несущей частоте необходимо осуществить подстройку по частоте Доплера и смещение на нулевую промежуточную частоту с выделением приходящей информации. Здесь принимаемый сигнал, с переносом на промежуточную частоту и после усиления, с платы № 2 (РИС. 8 и 10) через ключи устройства 8 поступает на сумматор сигнала от двух радио-модулей находящийся на управляющей плате АФАР (Рис.16), что позволяет учитывать направление приходящего сигнала за счёт сложения фаз на промежуточной частоте. Далее этот общий сигнал на промежуточной частоте после суммирования на управляющей плате АФАР через ключи 1 и 2 и делитель 1 (Рис.16) поступает на балансные смесители по синусу и косинусу на платах № 2 (Рис.8 и 10) двух радио-модулей через СВЧ разъём на верхней части платы №1 типа «защёлка». Причём в качестве формирователя промежуточной частоты используется синтезатор частоты того радио-модуля из двух, который не задействован при приёме на несущей частоте. Это позволяет обеспечить независимость между частотой гетеродина и промежуточной частотой перед сбросом на нулевую промежуточную частоту. После переноса на нулевую промежуточную частоту сигналы с балансных смесителей по синусу и косинусу поступают через операционные дифференциальные усилители на соответствующие АЦП и ПЛИС (плата № 1) этих двух радио-модулей, где происходит выделение информации со скоростью 41 Мбит/сек и определяется необходимая величина сдвига по частоте. Эти данные поступают на общий ПЛИС для этих радио-модулей на плате устройства управления АФАР, где путём, например, усреднения определяется оптимальное значение по подстройке по символам и частоте с выделением информационного сигнала. Подстройка по частоте Доплера здесь уже осуществляется за счёт ПЛИС, ЦАП и балансного модулятора, находящихся на плате устройства управления АФАР (нижняя часть платы №1), которые использовались и в режиме передачи для луча подАФАР. Надо отметить, что использование при приёме балансных смесителей по косинусу и синусу, АЦП и ПЛИС от двух радио-модулей при обработке принимаемого сигнала с некоторого направления позволяет уменьшить шумы квантования, так как детерминированные сигналы имеют корреляцию, а шумы нет. Кроме того, используя, например, в одном радио-модуле прямой сигнал такта дискретизации на АЦП, а во втором радио-модуле инверсный сигнал такта дискретизации на АЦП, можно получить более точную символьную синхронизацию с ошибкой определения 1/(246 МГц), а значит, и получить снижение вероятности ошибки по достоверности информации. При режиме навигации и определения местоположения мы будем иметь точность не менее 1,2 метра, и это без учёта использования сплайнов, оценивающих значения амплитуд накопления при тактах дискретизации.
Преимущество многолучевого режима выражается и в том, что в этом случае время вызова от БПЛА на абонента по сравнению с однолучевым вариантом без поиска по направлению при коде в 128 бит составит 28,77 млсек, что позволяет выделить на поиск и обнаружение время соизмеримое с временем отводимое на преамбулу Simplex с одним слотом (по рисунку 1) с вызовом и ответом через 0,09 сек. То есть, мы укладываемся в интервал времени вызовов с ответами в 2,1 сек. Однако мы будем иметь падение коэффициента усиления для каждой подАФАР до 14,5 дБ (28,18 раз), если исходить из параметров антенны [8]. Соответственно это должно компенсироваться увеличением энергетического потенциала во столько же раз. В нашем случае мы должны повысить мощность излучения УМ с 0,04 Вт до 0,32 Вт (такую мощность при питании в 3 В даёт один усилитель мощности SZA-2044, а у нас их в радио-модуле - четыре). Аналогично с 0,04 Вт до 0,32 Вт нужно поднять и мощность передатчика абонента для ответа на вызов. Отсюда, если вычислить по формуле (2) полосу пропускания необходимую для обнаружения нашего сигнала средствами РТР противника с учётом того, что Рц=0,32 Вт, Gцбл=0,444, то она также составит 20,8 МГц. Но параметры по скрытности могут быть улучшены, если учитывать априорное направление антенны абонента, состоящей из 2-х патч, в сторону БПЛА. При априорном начальном расположении патч-антенны радио-модуля абонента в сторону БПЛА мощность сигнала БПЛА можно снизить, так как ранее мы исходили из того, что в одночастотном режиме мы используем при передаче Рц=0,04 Вт по формуле (3), при этом получили необходимую полосу в 5,87 МГц и коэффициенте усиления антенны абонента в Ga=0,5. Учитывая возможность направления антенны из 2-х патч предлагаемого радио-модуля абонента в сторону на БПЛА, то благодаря Ga=14,1 (11,5 дБ) с учётом формирования 8-ми лучей, мы получим полосу пропускания по формуле (3) равной 20,69 МГц. В этом случае мы имеем превышение над порогом чувствительности уже по одному символу информации с учётом кода Манчестера. Соответственно при Рц=0,04 Вт, вместо Рц=0,32 Вт, в средстве РТР противника потребуется сузить полосу пропускания для обнаружения сигнала в 8 раз до 2,6 МГц. Это означает, что для обнаружения сигнала от БПЛА потребуется накопить 8 символов информации без учёта скважности. При скважности Q=10 потребуется сузить полосу пропускания для обнаружения ещё больше до 0,26 МГц, а это возможно только для случая ретрансляции сигнала от БПЛА противника на наземное средство РТР, где возможно параллельное использование множества цифровых фильтров. Понятно, что не всегда удаётся правильно обеспечить начальное априорное положение антенны радио-модуля относительно БПЛА, поэтому при сигнале вызова и ответа после поиска и обнаружения взаимно передаются навигационные данные о местоположении БПЛА и абонента, что позволяет достаточно точно ориентировать как луч БПЛА, так и выставлять априорное положение предлагаемого радио-модуля абонента. Кроме того, режим дуплекса позволяет использовать сигнал, принимаемый на промежуточной частоте для поиска и обнаружения во время передачи сигнала на несущей частоте. То есть, в этом случае время на поиск и обнаружение сигнала от абонента и обратно можно разнести с временем передачи и приёма информации на основной несущей частоте, что повышает помехоустойчивость.
Исходя из сказанного, будем считать, что для 8-ми лучевого варианта АФАР при априорном расположении патч-антенны радио-модуля абонента в сторону БПЛА у нас идет накопление 7 бит по некоторому коду, например, по коду Баркера с учётом кода Манчестера, и при скважности Q=3. В этом случае один символ информации выделяется при полосе пропускания в 0,976 МГц (1,024 мксек). Фактически это сравнимо со скоростью передачи в 1,2288 Мбит/сек при коде в 128 бит в системе «Globalstar». Понятно, что в данном варианте необходимая полоса пропускания для обнаружения сигнала БПЛА в средстве РТР противника должна быть тоже не менее 0,976 МГц, что обеспечить весьма затруднительно, так как на полосу пропускания антенны в 200 МГц потребуется иметь 204 цифровых фильтра. Подчеркнём, что сигнал от абонента при априорном расположении патч антенны его радио-модуля, если исходить из формулы (1), может быть определён, если используется установка средства РТР противника на летательный аппарат (ЛА) и при полосе пропускания 0,208 МГц с принятием сигнала по боковому лепестку в минус 40 дБ. Иными словами, обнаружение сигнала от абонента представляет ещё более сложную задачу.
Как мы отмечали выше, мы можем сократить время вызова при АФАР с восемью лучами, уменьшив код вызова до 12 бит вместо 128 бит и менее, так как достоверность символа информации обеспечивается уже при одном из семи бит кода Баркера с учётом кода Манчестера при скважности Q=3. Отметим, что при начальном вызове использование кода Баркера и кода Манчестера снижает уровень боковых лепестков при поиске для символьной синхронизации, однако это не значит, что мы не можем использовать иные коды. В этом случае общая длина кода составит величину 504 бита (это сравнимо с кодом ГЛОНАСС в 512 бит, но при этом в ГЛОНАСС на код уходит 1млсек), что по времени эквивалентно длине 1/41 МГц×12 (символов информации)×7 (биты кода Баркера)×2 (биты кода Манчестера)×3 (скважность)=12,2925 мксек. Отсюда мы имеем общее время на поиск и обнаружение 504×12,2925 мксек×2 (сдвиг на полбита)=12,39 млсек. Это означает, что для режима вызова необходимо 2 слота по рисунку 1. Понятно, что время вызова можно ещё больше сократить, если использовать вначале биты кода по времени большей длины (например, от 0,1 мксек до 1 мксек) с переходом на биты по времени малой длины (1/41 МГц=24,39 нсек), что оговаривается использованием соответствующего протокола связи. При этом, при использовании 2-х слотов для вызова с длительностью 8,28 млсек мы имеем 4,169 млсек для дополнительного потока необходимой информации при вызове и ответе. Так как у нас превышение над порогом будет уже при наличии кода Манчестера (0,049 мксек), то при коде Баркера и скважности Q=10 за 4,169 млсек мы сможем передать 1220 бит дополнительной служебной информации. Надо отметить, что 8 лучей, которые дают подАФАР соответствуют количеству 8 лучам одной из шести АФАР находящихся на КА системы связи «Iridium», что позволяет говорить о совместимости режимов с использованием аналогичного формат кадра по рисунку 1 при временном разделении пользователей.
Теперь остановимся на однолучевом многочастотном режиме при передаче и приёме. В этом случае в режиме передачи в многочастотном режиме, и с использованием одного общего луча АФАР, в управляющей плате происходит суммирование сигналов от восьми балансных модуляторов на этой плате. Этот общий суммарный сигнал далее будет поступать на несущей частоте с информацией на балансные модуляторы всех радио-модулей на плате № 2 через ключи (устройство 16), которые также находятся на управляющей плате АФАР. Однако в этом случае необходимо учитывать возможность наличия интермодуляционных помех, что исключается за счёт линейного режима работы в усилителях. Представленная функциональная схема на рисунке 15 обеспечивает также режим дуплекса, при котором передача сигнала информации на высокой несущей частоте может осуществляться с приёмом сигнала информации на промежуточной низкой частоте от дополнительной антенны. В этом случае частота сигнала от синтезатора одного из радио-модулей без информации, может не совпадать с частотой на передачу на высокой частоте, что расширяет диапазон возможных частот для принимаемых сигналов информации на низкой промежуточной частоте. Соответственно балансные модуляторы (устройство 9) на платах № 2 радио-модулей вносят изменение фазы для одного из семи возможных положений луча АФАР.
В одном луче АФАР мы можем использовать при приёме и 8 гетеродинных частот по количеству ПЛИС, ЦАП и БМ в управляющей плате АФАР с соответствующей подстройкой по частоте Доплера по информации от ПЛИС (устройство 12) радио-модулей, которые и перед поступлением на балансные модуляторы (устройство 9) радио-модулей суммируются. Возможный разнос частот при полосе в 200 МГц может равняться величине в 25 МГц. В этом случае также необходимо учитывать возможность наличия интермодуляционных помех.
Теперь определим, какая дополнительная информация необходима для обеспечения различных режимов работы в первом приближении. В этом случае предполагаем, что в зоне барражирования для связи может находиться до 8 БПЛА и это 3 бита информации. Суть использования нескольких БПЛА в том, что возможно применение режима «Хендовер» (в сотовой связи процесс передачи обслуживания абонента во время вызова или сессии передачи данных от одной базовой станции к другой). В нашем случае это исключает наведение ракет по сигналам связи от БПЛА в силу того, что после передачи абонентов с первого БПЛА на второй БПЛА, первый БПЛА переходит в режим молчания с коррекцией направления движения, например по кругу. Следующим шагом необходимо обеспечить временную синхронизацию, с этой целью следует передать абоненту местоположение БПЛА по трём координатам. Здесь практически можно использовать разметку топографических карт с привязкой к соответствующему листу местности размером 20 км × 20 км с точностью до 1 метра. Это соответствует необходимости наличия 15 бит по длине и ширине. Отметим, что если исходить из точности такта дискретизации при символьной синхронизации в 123 МГц, то требуемая точность составит 2,44 метра. Для варианта, рассмотренного при восьми лучах с использованием прямого и инверсного такта дискретизации, мы обеспечиваем точность в 1,2 метра. Одновременно будем считать, что потолок высоты БПЛА составляет 6 км, что требует наличия ещё 13 бит информации. Таким образом, на передачу дополнительного сообщения о местоположении уйдёт порядка 43 бита информации. Далее необходимо выдать показание временного счётчика в момент окончания временного интервала по поиску и обнаружению. Если считать, что показания счётчиков могут отличаться на 2 секунды, исходя из того, что запрос может происходить каждые 2 секунды, то при допустимой ошибке в 2 такта дискретизации, что составляет 2/123 МГц=0,0163 нсек нам потребуется 27 бит информации. В итоге в самом начале мы должны выделить на идентификацию БПЛА и привязку к времени и месту 73 бит информации. Далее может идти информация о номере вызова абонента. Как было показано выше это число соответствует числу 640. Однако, будем пока считать, что это количество не может превысить количество одновременно обслуживаемых абонентов одним КА «Iridium» в 2500, на что потребуется ещё 12 бит информации. Таким образом, общее количество первоначальной информации составит 85 бит. Исходя из приведённых выше данных по возможному выделению бит на дополнительную информацию, мы можем значительно повысить начальную точность определения местоположения и на временное рассогласование часов на БПЛА и у абонента за счёт дополнительных бит. Зная местоположение БПЛА и время после цикла поиска и обнаружения, а также своё местоположение по данным навигации, устройство абонента способно вычислить время, исходя из дальности от БПЛА до абонента, когда можно дать ответ в относительном времени, чтобы попасть на начало цикла приёма информации, при этом осуществляется и синхронизация часов. Однако, теперь, необходимо определить, когда необходимо выдать ответ на запрос от БПЛА с учётом того, что он перемещается со скоростью 250 км/ч (Vбпла=69,45 м/сек). Если исходить из поочерёдного цикла приёма и передачи через 8,28 млсек, то за время одного слота БПЛА переместится на 0,575 метра. С учётом распространения сигнала на 20 км, туда и обратно (это не более 3 млсек), общее время перемещения БПЛА за время запроса и ответа составит менее 1 метра, что не даст нарушения в режимах синхронизации, так как у нас такт дискретизации с прямым и инверсным сигналом в 123 МГц даёт неопределённость в 1,2 метра. Понятно, что при многолучевом режиме в 8 лучей при вызове и ответе ( это использование 2 слотов на приём и 2 слотов на передачу) у нас остаётся 1220 бит - 85 бит=1135 бит на дополнительную информацию или на использование дополнительного кодирования.
Благодаря меньшей дальности от абонентов до БПЛА по сравнению с системами связи космического базирования мы имеем лучшие параметры по энергетическому потенциалу и чувствительности. Здесь, при наличии многолучевого режима на 8 лучей мы используем синтезаторы частот каждого радио-модуля с учётом приёма и передачи, и при этом радиоэлементы имеют многофункциональное применение. В автономном режиме каждого радио-модуля АФАР БПЛА число параллельных каналов доходит до шестнадцати. При использовании 8 ПЛИС, ЦАП, балансных модуляторов на плате устройства управления АФАР мы можем принимать и передавать до 8 сигналов информации параллельно также и в режиме одного луча АФАР. То есть мы обеспечиваем и многочастотный режим для АФАР БПЛА. Как известно, одна АФАР из шести в КА «Iridium» способна формировать в многочастотном режиме параллельно только 6 сигналов. Понятно, что параллельная передача сигнала потребует увеличение мощности в 8 раз. Однако ранее мы исходили из того, что в одночастотном режиме мы используем при передаче 0,04 Вт по формуле (3), при этом получили необходимую полосу в 5,87 МГц и коэффициенте усиления антенны абонента в Ga=0,5. Если учесть ещё возможность антенны из 2-х патч предлагаемого радио-модуля абонента с априорным направлением в сторону на БПЛА, то в этом случае благодаря Ga=14,1, с учётом потерь в 8 раз из-за параллельного излучения, мы получим полосу пропускания по формуле (3) равной 20,69 МГц. Это сравнимо с чувствительностью приёмника РТР противника по формуле (2), что позволяет говорить о соблюдении скрытности передаваемого сигнала абонентам. Надо отметить, что наличие одновременно параллельно излучаемых и передаваемых сигналов позволяет поднять количество абонентов в однолучевом режиме АФАР БПЛА с 320 до 2560, что соответствует количеству абонентов, обслуживаемых одним КА «Iridium». Кроме того, время поиска и обнаружения ответа от абонента также может быть сокращено благодаря тому, что сигнал ответа от абонента может приниматься одновременно по 8-ми каналам с разделением интервала поиска между ними.
Одновременно, если поднять мощность излучения на передачу, например в 8 раз с 0,04 Вт до 0,32 Вт, то возможно использовать режим QAM вместо BPSK с увеличением количества информации в режиме ТЛФ на каждого абонента в 3 раза с 4,6 кбит/сек до 13,8 кбит/сек. Если такую мощность использовать для каждого из 4-х УМ в предлагаемых радио-модулях, то скорость передачи можно увеличить и до 55,2 кбит/сек для каждого абонента. Иными словами, АФАР для БПЛА на предлагаемых радио-модулях ни в чём не уступает системе связи «Iridium» для одного КА, но даже превосходит по радиотехническим параметрам и помехозащищённости. Надо отметить, что иной альтернативы увеличению коэффициента направленного действия для антенн абонентов, в целях помехозащищённости и увеличения скорости передачи, не существует. Именно по этому пути и пошли разработчики систем связи «Starlink» и «Oneweb» с учётом определения местоположения. В нашем случае мы имеем преимущество в том, что за счёт использования режима дуплекса мы можем совместить режимы первоначального вызова и ответа с использованием ненаправленной антенны на низкой частоте с применением в режиме информации направленной антенны на высокой частоте.
Соответственно представим упрощённую функциональную схему управляющей платы АФАР БПЛА, которая совмещена с платой № 1, но с расположением радиоэлементов на нижней части платы №1 (рисунок 16). Здесь разделены приёмная и передающая части за счёт их взаимодействия через радио-модули.
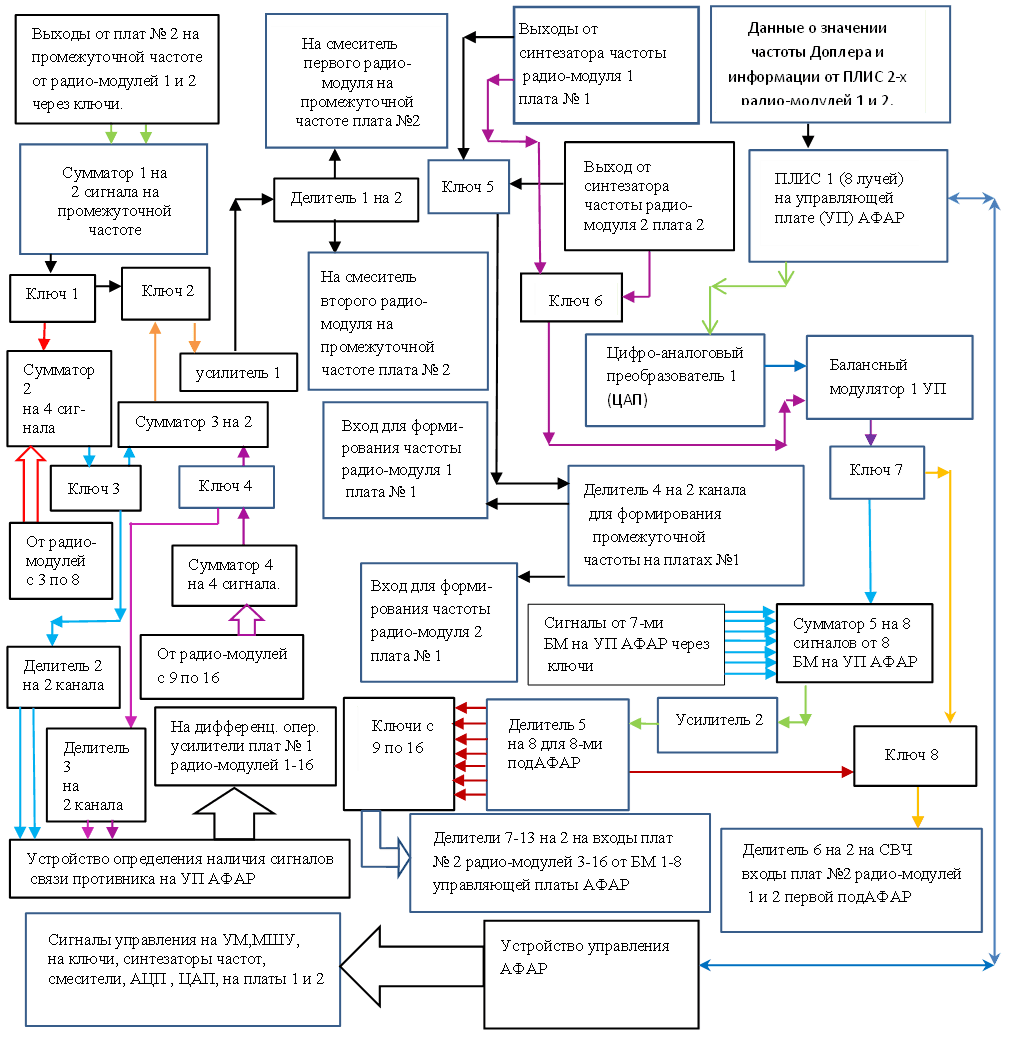
Рис. 16. Управляющая плата (УП) АФАР
Рассмотрим различные режимы работы в управляющей плате (УП) АФАР более подробно. При приёме сигналов информации на несущей частоте в радио-модулях, происходит их преобразование на промежуточную частоту, и сигналы на промежуточной частоте порядка 300-400 МГц от радио-модулей 1-16 поступают с устройств 8 (плата № 2) через ключи в устройстве 8 на УП АФАР по Рис. 15 и Рис.16. Далее эти сигналы суммируются попарно от двух радио-модулей с образованием 8-ми подАФАР. На Рис.16 это показано через сумматор 1. После суммирования общий сигнал от двух радио-модулей поступает на ключи (на Рис.16 это ключ 1). В устройстве управления АФАР (Рис.16) определяется режим работы. В одном положении ключей 1 и 2 общий сигнал от двух радио-модулей на промежуточной частоте поступает после усиления (усилитель 1) на делитель 1, где делится на 2 сигнала. Эти сигналы с учётом фазы луча подАФАР поступают обратно на балансные смесители (устройство 10 плата № 2) через СВЧ разъём типа «защёлка». На другие входы этих балансных смесителей поступают сигналы промежуточной частоты (устройство 10 (плата № 2) на Рис.15) в квадратуре от сигнала синтезатора частоты одного из двух попарно-объединённых радио-модулей. Далее в радио-модулях эти сигналы с платы № 2 поступают на плату № 1 на дифференциальные операционные усилители, и затем на АЦП и ПЛИС (плата № 1 радио-модуля). Отметим ещё раз, что сигнал дискретизации, поступающий на АЦП от ПЛИС в объединённых радио-модулях, может иметь прямой и инверсный вид, благодаря тому, что делитель 1 может быть выполнен на трансформаторе. В результате точность оцифровки повышается в 2 раза с уменьшением шумов квантования. Это улучшает и точность определения местоположения при использовании радио-модулей АФАР для навигации также в 2 раза без учёта применения сплайнов по амплитуде. В ПЛИС (плата № 1 радио-модулей) осуществляется обработка принимаемого сигнала с выявлением частоты Доплера (уровень управляющего напряжения) и сигнала информации (биты информации с тактом считывания), и эти данные поступают на соответствующий ПЛИС на плате УП АФАР исходя из формирования 8-ми лучей. В ПЛИС 1 (возможно и в устройстве управления АФАР) на плате УП АФАР одного из 8-ми (Рис.16) осуществляется оценка результатов полученных данных, с ПЛИС попарно объединённых радио-модулей по Рис. 15. Полученное значение управляющего напряжения для частоты Доплера используется для подстройки через сигналы по синусу и косинусу (по уровню сигнала полученного от ПЛИС радио-модулей), поступающие на ЦАП 1 (Рис.16) и далее на балансный модулятор БМ 1 УП. Одновременно с двух выходов каждого синтезатора частоты с попарно объединённых радио-модулей для формирования 8-ми лучей расположенных на плате № 1 по Рис.15, на плату УП АФАР поступают сигналы разной высокой частоты на ключи 5 и 6 по Рис.16. С помощью ключей 5 и 6 определяется частота сигнала, которая будет использоваться для формирования двойной промежуточной частоты. Эта частота сигнала через СВЧ разъём типа «защёлка» будет поступать с платы № 1 на балансные смесители платы № 2 (устройство 10) через делители частоты на 2 (формирование сигналов в квадратуре). Надо отметить, что частота сигнала может быть выбрана такой, что будет обеспечиваться перенос частоты сигнала информации не на нулевую промежуточную частоту, а вторую промежуточную частоту порядка 15-30 МГц. Это позволяет осуществлять подстройку по частоте Доплера внутри ПЛИС радио-модуля, но со снижением скорости передачи информации до 10 Мбит/сек и менее. Одновременно с помощью ключей 5 и 6 определяется и частота сигнала, которая будет использоваться в качестве гетеродинного сигнала с поступлением на БМ 1 УП (Рис.16). Возможны как одинаковые частоты сигналов при формировании промежуточной и основной частоты, так и разные. Далее через ключ 7 и ключ 8 и делитель 6, сигнал гетеродина со смещением по частоте Доплера через СВЧ разъём типа «защёлка» с платы № 1 поступает на устройства 9 плат № 2 (Рис.15) двух попарно-объединённых радио-модулей. В устройстве 9 плат № 2 сигнал гетеродина поступает на балансный модулятор, который изменяет фазу сигнала и обеспечивает управление лучом одной из восьми подАФАР в данном режиме работы. Соответственно этот сигнал поступает на смеситель (устройство 6 на плате № 2) через ключ (устройство 15 плата № 2) на рис.15. Этим самым обеспечивается приём сигнала на несущей частоте с замыканием ФАПЧ с подстройкой по частоте Доплера и выделением сигнала информации в ПЛИС радио-модулей в режиме 8-ми лучей.
Следующий режим работы при приёме сигналов в варианте одного или 2-х лучей АФАР заключается в том, что через ключ 1 УП АФАР сигнал от двух объединённых попарно радио-модулей поступает на сумматор 2 для 4 сигналов от радио-модулей 1-8. С сумматора 2 для 4-х сигналов от радио-модулей 1-8 общий сигнал поступает на ключ 3. Аналогично с сумматора 4 для 4-х сигналов от радио-модулей 9-16 общий сигнал поступает на ключ 4. В режиме общего одного луча АФАР сигналы с ключей 3 и 4 (Рис.16) поступают на сумматор 3. Полученный общий сигнал на промежуточной частоте с принимаемой информацией поступает на ключ 2 и с него через усилитель 1 на делитель 1. После деления на два сигнала в делителе 1 сигналы поступают на балансные смесители объединённых попарно радио-модулей 1 и 2 на плате № 2 (устройство 10 на Рис.15). Далее сигналы на нулевой промежуточной частоте с разделением по синусу и косинусу с платы № 2 радио-модулей 1 и 2 поступают на соответствующие АЦП и ПЛИС, в результате чего осуществляется выделение информации и определение сдвига по частоте Доплера. Данные о частоте Доплера поступают на ПЛИС 1 на управляющей плате АФАР (Рис.1), а информация поступает на устройство управления АФАР. Формирование общего гетеродинного сигнала на все радио-модули 1-16 осуществляется аналогично тому, как это было показано для одного луча из восьми подАФАР, с той разницей, что через ключ 7 сигнал гетеродина поступает вначале на сумматор 5, а не сразу на ключ 8. Сигналы от других БМ УП АФАР в этот момент при отсутствии многочастотного режима при приёме не поступают. С сумматора 8 сигнал поступает на усилитель 2. После усиления общий сигнал гетеродина с учётом сдвига по частоте Доплера поступает на делители 7-13 и ключи 8-16. Далее сигнал поступает на устройство 9 (Рис.15) всех 16 радио-модулей через делители 6-13. При режиме передачи при наличии одного общего луча АФАР возможен многочастотный параллельный режим передачи информации одновременно 8-ми абонентам. В этом случае со всех 8-ми ПЛИС УП АФАР поступают сигналы информации через соответствующие восемь ЦАП на восемь БМ УП АФАР. На вторые входы БМ УП АФАР поступают (от 8-ми из 16-ти синтезаторов частот радио-модулей) сигналы несущих частот. Про модулированные информацией сигналы несущих частот через соответствующие ключи 7 поступают на сумматор 5 для суммирования 8-ми сигналов на несущих частотах с информацией. Далее через усилитель 2 сигналы поступают через ключи на соответствующие радио-модули в устройство 9 по Рис.15. В балансном модуляторе устройства 9 к сигналу передачи добавляется фаза для обеспечения нужного направления луча. Надо отметить, что оставшиеся синтезаторы частоты в радио-модулях могут использоваться для приёма сигналов информации от дополнительной антенны в режиме дуплекса. Понятно, что в режиме приёма на высокой частоте также организуется режим дуплекса для передачи информации на промежуточной частоте. Собственно режим дуплекса на промежуточной частоте позволяет в скрытом режиме осуществлять как поиск, обнаружение и вызов с обеспечением временной синхронизации по аналогии как это сделано в системе связи «Iridium».
Для выделения сигнала связи противника предусмотрено деление общей АФАР на 2 подАФАР (Рис.16). С этой целью сигналы первой подАФАР через ключ 3 поступают на делитель 2 и далее на устройство определения наличия сигналов связи (УОНСС) и помех от противника. Соответственно сигналы второй подАФАР поступают через ключ 4 на делитель 2 и далее на устройство определения наличия сигналов связи, где происходит обработка сигнала по принципу показанному на функциональной схеме по рисунку 5.
Это устройство определения наличия сигналов связи находится на управляющей плате АФАР. То есть, помимо связи обеспечивается многофункциональное использование.
Соответственно можно сделать выводы по использованию предлагаемых радио-модулей в системах связи с учётом их объединения в АФАР БПЛА.
- Конструкция применения патч в предлагаемых радио-модулях позволяет формировать на их основе патч-антенны в диапазоне от 250 МГц до 4 ГГц (до 6 ГГц при специализированной АФАР) с использованием как вертикальной, горизонтальной и круговой поляризации как левой, так и правой [7].
- Предлагаемые радио-модули имеют оптимизированные радиотехнические параметры для обеспечения связи вплоть до 150 Мбит/сек при быстрой фазовой автоподстройки частоты (ФАПЧ) вплоть до 100 мксек [1].
- Предлагаемые радио-модули сочетают в себе возможность принимать и излучать сигналы информации как на высокой несущей частоте, так и на промежуточной частоте в режиме дуплекса, что позволяет сочетать режимы всенаправленной антенны на низкой частоте с направленной антенной на высокой частоте.
- Использование предлагаемых радио-модулей в АФАР БПЛА позволяет использовать как многолучевой режим работы, так и многочастотный режим на приём и передачу с лучшими параметрами, чем это предлагается в системах связи «Iridium» и «Globalstar».
- По количеству обслуживаемых абонентов АФАР БПЛА равняется количеству обслуживаемых абонентов одним КА связи «Iidium» или «Globalstar».
- По скорости передачи информации АФАР БПЛА на предлагаемых радио-модулях равняется таким системам связи как «Starlink» и «OneWeb», что позволяет передавать сигналы от оптико-электронных устройств в цифровом виде с высоким разрешением.
- Предлагаемые радио-модули обеспечивают помехозащищённый протокол связи с учётом перестраиваемых радиотехнических параметров.
- Выбор конфигурации предлагаемых радио-модулей определялся размерами смартфона с учётом индивидуального отдельного применения радио-модуля и составил 13,5 см×7 см×1,5 см (в случае с использованием с антенной АФАР 13,5 см×7 см×2 см), что лучше даже отдельных специализированных устройств. Для примера навигационный приёмник Каскад - 4 М имеет размеры 13 см×13см×2,2 см, что неудобно при личном использовании из-за квадратной конструкции. Одновременно устройство связи Е2Е4 KHUKRI STEALTH имеет размеры 14 см×8см×4 см, что также неудобно при личном использовании из-за толщины.
- Предлагаемые радио-модули обеспечивают в режиме АФАР БПЛА и многофункциональные режимы такие как определение местоположения сигналов связи и помех от противника, а также обеспечивают точность подстройки по символам, что позволяет при определении местоположения иметь точность порядка одного метра и менее.
- Предлагаемые радио-модули используют радиоэлементы из ширпотреба 10-15 летней давности и легко могут быть освоены нашей промышленностью. При этом обеспечивается унификация с использованием радио-модулей как отдельно, так и в качестве элементов АФАР. Дальнейшее развитие связано с микроминиатюризацией за счёт объединения радиоэлементов в общие микросхемы с уменьшением энергетических потерь. При этом габаритные характеристики радио-модуля определяются размерами патч-антенны. Кроме того, аналогичные характеристики по многофункциональности получить с помощью известных трансиверов, например, таких как трансивер AD9361, невозможно в силу их узкоспециализированного применения.
