В системе замкнутого контура «водитель-транспортное средство-дорога» водитель играет роль не только диспетчера, но и главного оценщика качества следования дорожному транспортному средству. Из-за разного опыта вождения, эмоций, предпочтений в вождении и т.д. Водитель становится самой слабой частью в системе замкнутого контура водитель–транспортное средство–дорога.
И разные водители демонстрируют различное поведение; то есть каждый водитель имеет свою уникальную характеристику вождения (также называемую стилем вождения). Для улучшения характеристик системы замкнутого контура водителя транспортного средства исследование характеристик водителя включает в себя [2]:
- идентификацию характеристик водителя на основе движения головы и черт лица, таких как распознавание движения глаз;
- идентификация характеристик водителя на физиологической и психологической основе, которая улучшает интерактивные характеристики человека и машины и / или повышает комфорт работы водителя;
- идентификация характеристик водителя на основе поведения водителя, которое обнаруживает ненормальное поведение при вождении и затем сигнализирует водителю, разрабатывает метод управления комфортом вождения и / или разрабатывает ориентированные на человека системы помощи при вождении;
- исследование характеристик водителя, основанное на динамическом моделировании замкнутой системы водитель-автомобиль-дорога, которое направлено на оптимальное проектирование динамических характеристик замкнутой системы.
В нашем исследовании идентификация, как правило, осуществляется на основе измеренного в реальном времени поведения водителя и состояний транспортного средства или путем мониторинга движений головы и / или выражений лица водителя.
Считается, что после завершения определения характеристик поведения водителя может быть выполнена следующая задача [4]:
- транспортное средство будет следовать текущей операции водителя, запускать соответствующее устройство помощника по вождению для достижения плавного перехода в полуавтономный режим. человеко-машинные режимы управления, а также реализовать координацию работы водителя и автоматического управления;
- параметры электронной системы управления будут автоматически изменены, или будут выбраны соответствующие характеристики идеальных эталонных моделей, установленных для достижения идеального динамического отклика транспортного средства, адаптивного управления водителем и индивидуального вождения;
- системы, которые в режиме реального времени отслеживают и оценивают поведение водителя и его состояние вождения (усталость/пьяное/сонливое/отвлеченное вождение), могут заблаговременно выявлять возможные ошибки в работе и предупреждать водителя о том, что он может избежать дорожно-транспортных происшествий при визуальном, слуховом или тактильном воздействии.
Поскольку выявление характеристик поведения водителя имеет большое значение для повышения активной безопасности автомобилей и достижения разумного вождения, все больше и больше исследователей занимаются изучением смежных областей, в основном Ford, Nissan. институт, Колумбийский университет, технологический университет Вены, Nagoya University, университет Цинхуа, Цзилинь университета, и Китайский университет Гонконга.
При управлении транспортным средством водитель определяет его / ее намерения и выбирает ряд режимов работы, которые наиболее подходят для текущих условий вождения. Даже очень простые намерения вождения (долгосрочное намерение вождения) можно подразделить на ряд более простых поведений при вождении (кратковременное поведение вождения); то есть намерение вождения достигается с помощью ряда поведений вождения.
Общепризнано, что поведение вождения варьируется между водителями в зависимости от их возраста, пола, этнической принадлежности, опыта вождения, эмоций и т.д. Даже для одного и того же водителя поведение вождения может меняться от ситуации к ситуации, что можно отнести к характеристикам поведения водителя. Различия каждого водителя в характеристиках водителя обусловлены тем, как работает и реагирует подсознание водителя, и преобразование из подсознания в сознание также будет генерировать уникальные отклики о том, как работает мозг.
Существует много литературы, посвященной изучению уникальности поведения вождения на транспортных средствах и возможности его использования для определения характеристик водителя с целью обеспечения более безопасного и персонализированного вождения, для обнаружения ненормальной работы водителя и затем тревоги, чтобы реализовать интеграцию между водитель и электронные системы управления, или для построения моделей идентификации характеристик поведения водителя [7].
Например, данные, собранные набором датчиков транспортного средства, могут быть обработаны определенными методами распознавания для распознавания серии маневров вождения, а параметры этих маневров вождения могут быть извлечены и использованы для классификации характеристик водителя или оценки способностей водителя.
На рисунке приведена структура распознавания образов нейронной сети для классификации поведения при движении автомобиля в следующих условиях. Закрытие относится к следующему транспортному средству рядом с ведущим транспортным средством, а отставание относится к ведущему транспортному средству вдали от следующего транспортного средства.
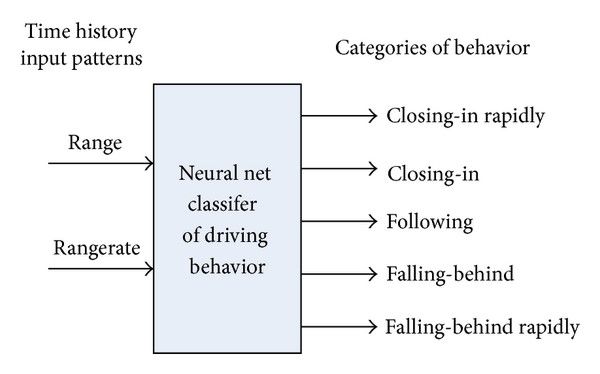
Рис. 1. Структура распознавания образов нейронной сети
Некоторые системы мониторинга и анализа также разрабатываются и доступны для исследования поведения водителя и, наконец, получены характеристики поведения водителя. Томер Толедо разрабатывает систему записи данных в автомобиле (IVDR) для мониторинга и анализа поведения вождения, как показано на рисунке 2. Из рисунка видно, что эта система может идентифицировать различные маневры, которые происходят в измерениях, и результаты могут быть использованы для оценки индексов риска, которые показывают безопасность во время всей поездки, и для классификации характеристик водителей [8].
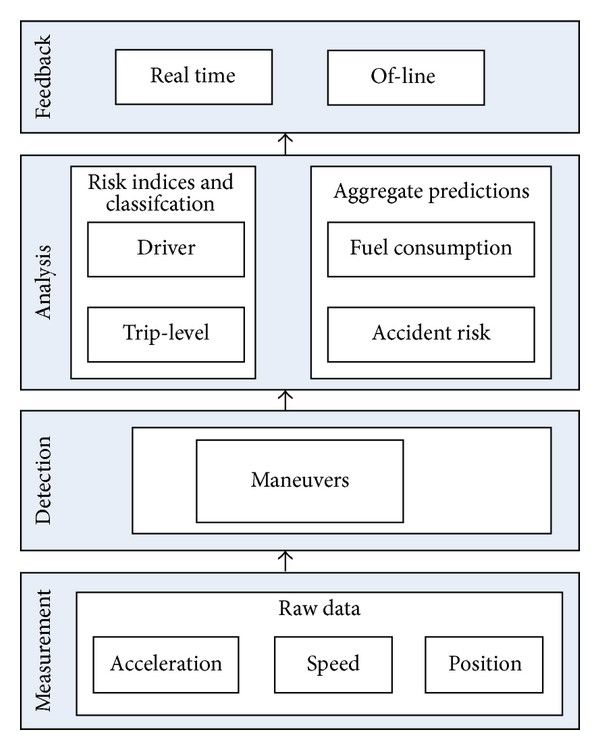
Рис. 2. Общая структура системы IVDR
Ключевые технологии для идентификации характеристик поведения водителя
Согласно предыдущим исследованиям, идентификация характеристик поведения водителя моделируется на основе определенных методов распознавания образов с использованием данных моделирования или полевых испытаний. Следовательно, выбор методов распознавания образов, экспериментального дизайна и сбора данных имеет большое значение для построения моделей идентификации характеристик поведения водителя. В общем, характеристики поведения водителя должны быть классифицированы до их идентификации [3].
Классификация характеристик поведения водителя
Теория нечеткого управления и алгоритм K-средних обычно используются для кластеризации параметров функций, которые отражают характеристики поведения водителя, для достижения классификации характеристик поведения водителя. Для достижения возможной классификации характеристик поведения водителя необходимо учитывать следующие аспекты.
Во-первых, важно выбрать возможные метрики, которые могут описать характеристики водителя. Следует отметить, что метрики, которые представляют характеристики водителя, выбираются специально, чтобы их можно было выразить с использованием определенных и измеримых параметров.
Во-вторых, результаты классификации напрямую зависят от выбранного метода кластеризации. Например, будучи своего рода методом обучения без наблюдения, алгоритм кластеризации K-средних обладает быстрой скоростью сходимости и лаконичной структурой; однако ошибки измерения и неопределенности игнорируются.
В-третьих, размер выборки параметров влияет на результаты кластеризации. В целом, увеличение объема данных (или количества драйверов) повысило бы точность классификации.
Лу и соавт. предложили, чтобы поведение вождения можно было разделить на четыре категории в отношении предельных условий управляемости (условий, превышающих пределы сцепления шин): осторожное, среднее, экспертное и безрассудное [1].
Под осторожным водителем понимается тот, кто обычно ездит без частых агрессивных маневров, например, быстрое рулевое управление, высокая скорость и быстрое нажатие на педаль.
Среднестатистический водитель имеет особенности управления автомобилем с более высоким уровнем риска управления (HRF, параметр, который оценивает, насколько условия вождения близки к пределу управляемости), чем осторожный водитель.
Опытный водитель определяется как тот, кто может управлять транспортным средством при довольно высоком уровне HRF в течение длительного времени и не будет превышать лимит управления транспортным средством [12].
Водитель считается безрассудным, если он / она ведет себя небрежно и непредсказуемо во время своего вождения. Поскольку такое поведение при вождении не может быть четко определено, для определения четырех категорий водителей, указанных выше, используется нечеткий метод управления, как показано на рисунке 3. Кроме того, автор также использует скорость разрыва с нулевой скоростью для стабильного следования за автомобилем, чтобы классифицировать поведение вождения по трем типам – нормальное, осторожное и агрессивное. Точно так же водители характеризуются использованием времени отклика и коэффициента демпфирования для переходного слежения за автомобилем, что рассматривается как система 2-го порядка.
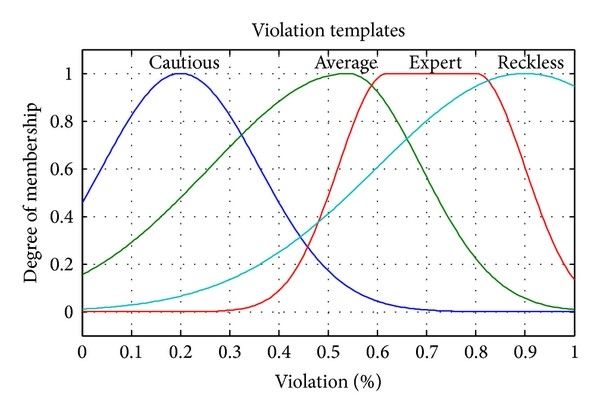
Рис. 3. Функции принадлежности, характеризующие четыре категории водителей, основанные на факторе риска обработки
Коэффициент на интервале представляет веса доступных маневров (безопасно выполненный маневр и опасно выполненный маневр), а комбинация двух маневров сравнивается с текущим маневром, чтобы найти ближайшее значение для воспроизведения исходного маневра, как показано на рисунке 4. Таким образом, представляет отношение водителя к текущему маневру, а метод нечеткой логики в сочетании со статистическим методом используется для классификации маневров вождения в терминах значения. Консолидированный алгоритм нечеткой кластеризации разработан и реализован для классификации различных условий следования за автомобилем, включая стабильное следование, ускорение, сближение, торможение и открытие с использованием предварительно обработанных данных [11].
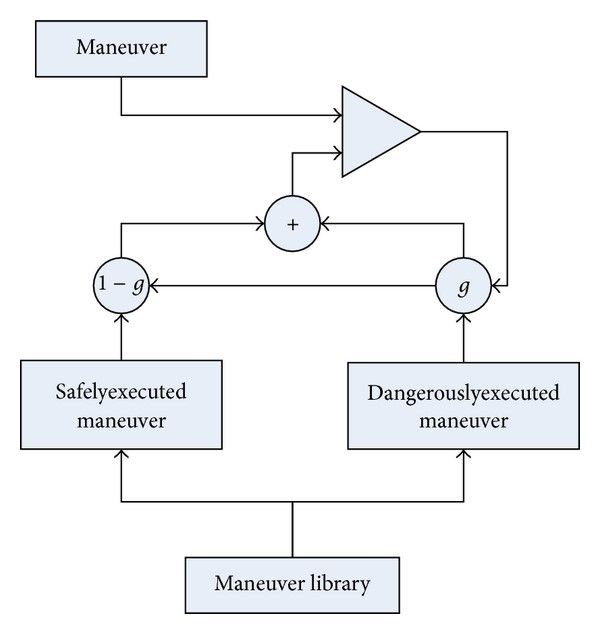
Рис. 4. Концептуальная структурная схема устройства для оценки отношения водителя
Общим недостатком нечетких алгоритмов является то, что пороговые значения определяются исключительно априорным знанием разработчиков моделей, возможно, с предвзятостью. Консолидированный метод, который может калибровать некоторые психологические пороги на основе свойств в реальных данных, никогда не разрабатывался. Одним из возможных подходов к решению вышеупомянутой проблемы является использование контролируемых методов классификации, например, байесовской классификации, но она требует подробного априорного знания (например, распределения вероятностей определенных переменных) при различных маневрах [6].
Алгоритм кластеризации K-средних, также известный как ISODATA (алгоритм итеративного самоорганизующего метода анализа данных), является широко используемым алгоритмом кластеризации без контроля, который может классифицировать многомерные данные по различным группам на основе определенных показателей различий. Ван и соавт. использовать эффективный алгоритм кластеризации K-средних для классификации детерминант поведения продольного вождения, полученных из 11 систем и связанных с управлением параметров, с указанными противоположными экстремальными значениями: агрессивный по сравнению с расчетливым, нестабильный по сравнению со стабильным, склонный к риску и редко встречающийся, неквалифицированные против умелых. В частности, в соответствии с последовательностью данных с условием следования за автомобилем данные времени столкновения (TTC) водителя, отпускающего педаль акселератора и запускающего торможения, извлекаются и используются для классификации водителей по трем категориям посредством метода кластерного анализа, а именно осторожного, нормальный и агрессивный.
Методы построения идентификационных моделей характеристик поведения водителя
Идентификация характеристик поведения водителя – это процесс распознавания образов. Поскольку характеристики поведения водителя различаются на разных дорожных покрытиях, маневрах вождения, профилях водителя и динамике транспортного средства, необходимы некоторые требования к выбранным методам моделирования: (1) предлагают надежную обработку, то есть способность обнаруживать, приблизительный и классифицирующий, и с высоким коэффициентом брака для шума и (2) работы, основанной на изученных случаях. В существующих попытках смоделировать характеристики поведения водителя преобладают модели, вдохновленные нейронной сетью (NN), Hidden Markov Model (HMM), теория нечеткого управления, модель гауссовой смеси (GMM) и другие модели
Все чаще признается, что интеллектуальные и персонализированные системы транспортных средств разрабатываются на основе определенных интеллектуальных алгоритмов, к которым имеется база знаний. Такие системы могут обрабатывать принятые сенсорные данные не только количественно, но и качественно, например, интерпретировать данные поведения при вождении, затем сравнивать их с сохраненными данными в базе поведения, в некоторых случаях добавлять эти новые данные поведения при вождении в базу поведения, и, наконец, определить характеристики поведения водителя [12].
Идентификация и применение характеристик водителя для управления автомобилем широко распространены и информативны. В настоящей работе представлены основные характеристики поведения водителя; объясняется внутренняя связь между поведением вождения, намерением вождения и характеристиками поведения водителя; Весь процесс во время установления моделей идентификации характеристик поведения водителя обобщается и детально анализируется, включая классификацию характеристик водителя, методы идентификации, экспериментальный дизайн и сбор данных, а также адаптацию модели. Исходя из этого, применение характеристик водителя для управления автомобилем было представлено в трех аспектах, а именно: интеллектуальная система консультирования водителя, система предупреждения безопасности водителя и система управления динамикой транспортного средства.
Водитель – сложный и неуверенный человек, который может демонстрировать различные характеристики вождения в разных ситуациях вождения (усталость / пьяное / сонливое / отвлеченное вождение). Кроме того, различные характеристики сцепления с дорогой, условия движения и погодные условия также влияют на характеристики водителя. Поэтому необходимо провести обширные эксперименты с потенциальными группами пользователей (группами с изучаемыми характеристиками водителя) с целью создания всеобъемлющей библиотеки поведения человека при вождении для большей точности и более широкого применения. Необходимо будет обеспечить надежность моделей в реальных дорожных ситуациях, а также повысить эффективность распознавания путем решения вышеупомянутых проблем. Онлайн адаптация характеристик поведения водителя считается одним из главных решений [5].
На самом деле на характеристики поведения водителя можно влиять и повторно использовать его в процессе обучения, поэтому очень важно создавать интерактивные адаптивные модели характеристик поведения водителя, используя данные полевых испытаний в режиме онлайн для пересмотра параметров установленных моделей вместо статических моделей. , Кроме того, могут существовать некоторые взаимные корреляции между классификациями характеристик поведения водителя, и эта тема заслуживает дальнейшего изучения.
Поскольку существующие классификации являются очень грубыми, классификация должна быть доработана, и конечная цель состоит в том, чтобы приобрести функцию личных предпочтений водителя. поэтому очень важно создавать интерактивные адаптивные модели характеристик поведения водителя, используя данные полевых испытаний в режиме онлайн для пересмотра параметров установленных моделей вместо статических моделей. Кроме того, могут существовать некоторые взаимные корреляции между классификациями характеристик поведения водителя, и эта тема заслуживает дальнейшего изучения. Поскольку существующие классификации являются очень грубыми, классификация должна быть доработана, и конечная цель состоит в том, чтобы приобрести функцию личных предпочтений водителя. поэтому очень важно создавать интерактивные адаптивные модели характеристик поведения водителя, используя данные полевых испытаний в режиме онлайн для пересмотра параметров установленных моделей вместо статических моделей. Кроме того, могут существовать некоторые взаимные корреляции между классификациями характеристик поведения водителя, и эта тема заслуживает дальнейшего изучения. Поскольку существующие классификации являются очень грубыми, классификация должна быть доработана, и конечная цель состоит в том, чтобы приобрести функцию личных предпочтений водителя [9].
Характеристики водителя использовались для идентификации водителя, для обнаружения ненормального поведения водителя, для разработки систем помощи водителю, которые адаптируются к индивидуальному водителю, для создания различных типов моделей водителя для интеллектуальной помощи отдельному водителю и так далее. Разработка идеальных динамических эталонных моделей для адаптации к характеристикам водителя для транспортных средств x-by-wire, а затем для понимания того, что «водитель приспосабливается к автомобилю», изменения в «автомобиль адаптируется к водителю», и, наконец, достижение индивидуального вождения, являются очень интересным и многообещающим применением характеристик водителя для управления автомобилем. С дальнейшими исследованиями, приложения характеристик водителя будут расширены в будущем.
