
Первым фактором при подавлении радиоэлектронных средств противника является определение несущих частот работы. Этот диапазон несущих частот сигналов может находиться в районе от сотен мегагерц до десятков гигагерц. Отсюда требование литерного деления диапазона АФАР на БПЛА. В [1-8] мы показали принципы создания и обработки сигнала в АФАР в диапазоне от 250 МГц до 4 ГГц на основе предлагаемых унифицированных радио-модулей. В диапазоне от 4 до 6 ГГц при антеннах на патч надо использовать для АФАР уже специализированные функциональные, электрические схемы, а также на их основе формировать топологию планарного размещения радиоэлементов относительно полотна АФАР. При диапазоне порядка десятка гигагерц используются, как правило, щелевые антенные решётки и здесь применяется конструкция модулей приёмопередатчиков с перпендикулярным подключением модулей к полотну АФАР. Однако, чем выше несущая частота, тем на меньших дальностях от командного пункта управления (КПУ) можно осуществлять связь с данным БПЛА, так как растёт энергопотребление за счёт повышения частоты и трудно обеспечить всенаправленную антенну, что определяется условием барражирования на театре военных действий (ТВД) для поиска целей и их уничтожения. Кроме того, при повышении частоты улучшаются условия для постановки помех с помощью подвижных АФАР РЭБ, которые в этом случае могут иметь высокий коэффициент направленного действия антенн (КНД) в направлении подавляемого средства. Например, сейчас успешно применяются БПЛА со щелевыми антенными решётками против РЛС контрбатарейной борьбы AN/TPQ-36 работающей в Х-диапазоне (порядка 10 ГГц). Преимущество БПЛА в том, что они могут заходить на цель уничтожения с любого направления и РЛС контрбатарейной борьбы просто не увидят атакующий БПЛА. Так как современные БПЛА не могут обойтись без систем навигации для определения местоположения и связи, то отсюда существует оптимум используемых радиочастот, для подавления исходя из частот современных систем навигации и связи. Для систем навигации используются диапазоны частот на рисунке 1.
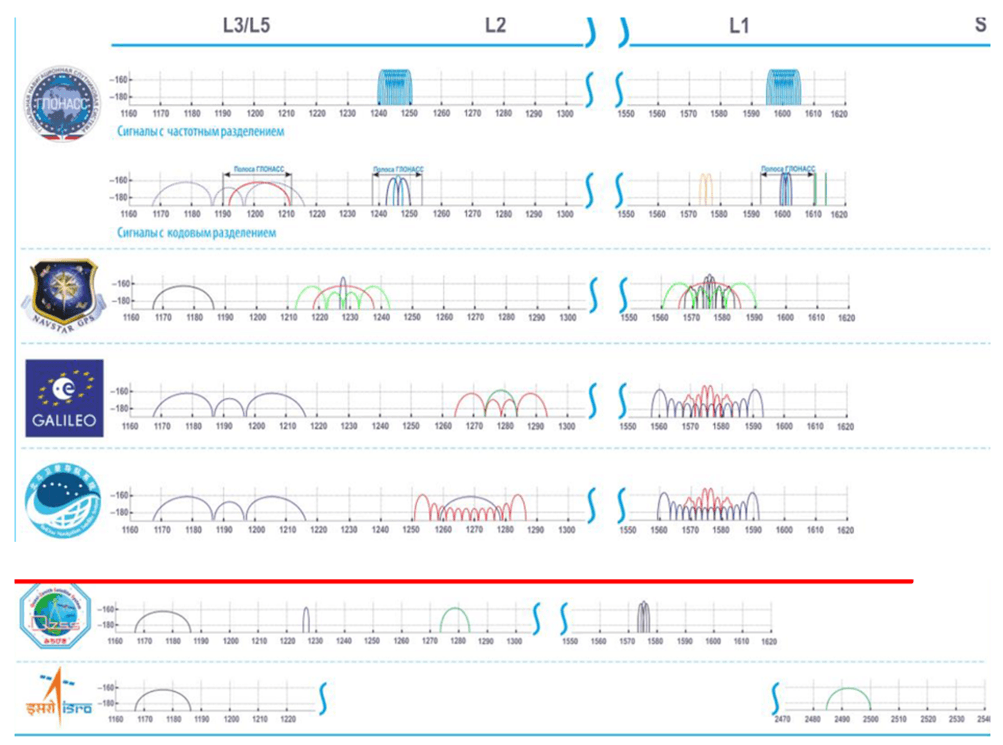
Рис. 1. Частотные диапазоны навигаторов спутниковых систем связи
Необходимо отметить, что такие широко используемые системы связи как «GSM1800», «Iridium» и «Globalstar» также находятся в данном диапазоне частот.
Так как для БПЛА дальнего действия особую роль играют навигационные спутниковые системы, то для оценки возможности подавления навигаторов возьмём помехоустойчивый навигационный приёмник «Каскад-4М». Пример этого навигационного помехоустойчивого приёмника размерами 130 мм х 130 мм х 22 мм, работающего в этом же диапазоне частот, показан на рисунке 2.
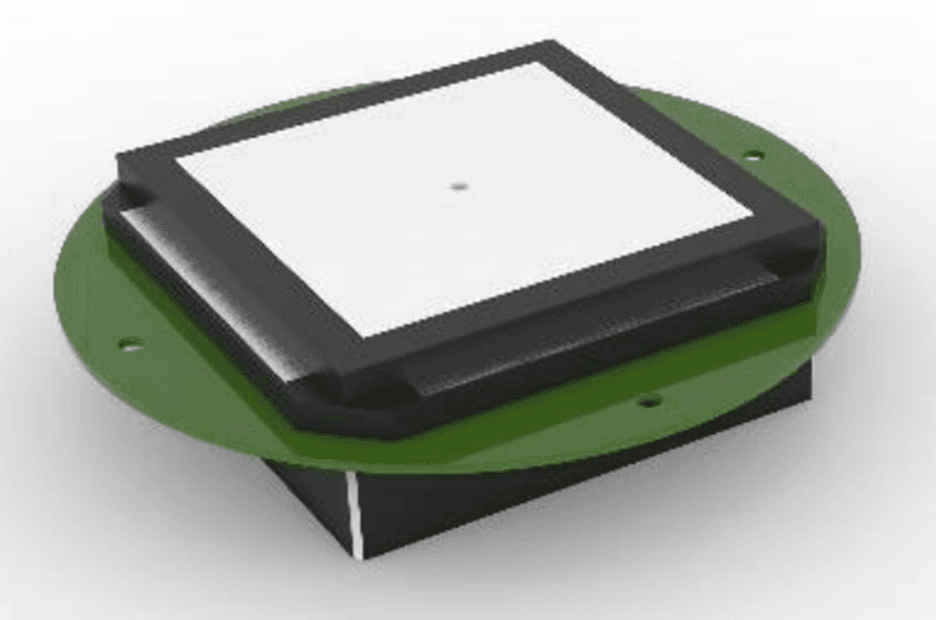
Рис. 2. Навигационный приёмник «Каскад-4М» при энергопотреблении в 6 Вт, и весе 250 г.
Собственно помехозащищённость в «Каскад-4М» обеспечивается накоплением кода и соответственно использованием патч-антенны, что предполагает помехоустойчивость до 90 дБ.
Ранее в [1-8] мы показали возможность создания АФАР как средства связи и навигации на основе унифицированного оптимизированного радио-модуля в диапазоне от 0,25 ГГц до 4 ГГц (это без учёта дальнейшей микроминиатюризации). Однако, АФАР может использоваться не только как средство связи и радиоуправления на основе унифицированных радио-модулей, выполнять функцию навигатора, радиотехнической разведки (РТР) с определением местоположения источника радиосигнала противника и его уничтожения, но АФАР может использоваться и как средство обнаружения БПЛА противника с постановкой помех в процессе радиоэлектронной борьбы (РЭБ). Определение местоположения БПЛА противника радиолокационным способом очень важно для РЭБ, так как подлёт нашего БПЛА к БПЛА противника, для постановки помех или уничтожения, эффективно осуществлять на небольших расстояниях. Например, РЛС контрбатарейной борьбы AN/TPQ-53 работает в диапазоне 2–4 ГГц, что позволяет для противодействия использовать БПЛА с АФАР для РЭБ на предлагаемых радио-модулях. Для эффективной постановки помех необходимо использовать помеховые сигналы идентичные сигналам связи, РЛС и навигации, что исключает возможность идентификации наличия помехи по признакам различия. Оценка результатов борьбы на современном театре военных действий (ТВД) показала, что применение наземных комплексов РЭБ эффективно при малом времени работы, так как противник уничтожает такие средства РЭБ по сигналу помехи. Поэтому для постановки помех БПЛА противника, у которых скорость не превышает сотен километров в час, должны использоваться БПЛА РЭБ с АФАР. БПЛА РЭБ с АФАР в силу своей мобильности и многочисленности, при динамике движения, могут во времени менять источник помехового воздействия. Такой способ исключает вариант наведения по источнику помехи.
Если противник использует БПЛА дальнего действия, то наведение на цель осуществляется по данным от систем навигации. В этом случае эффективным средством противодействия является уничтожение БПЛА или его дезориентация за счёт помех системе навигации. Предположим, что перед уничтожением БПЛА противника с дальним радиусом действия используется постановка помех. Для оценки воздействия помех нами выбран приёмник навигации «Каскад-4М». В этом случае в диапазоне 1142,5 МГц до 2170,75 МГц находятся навигационные сигналы таких систем навигации как GPS, ГЛОНАСС, Galileo, Beidou. В заявленных характеристиках глушение «Каскад-4М» от борта с мощностью в 100 Вт происходит на расстояниях 100–200 м и от борта с мощностью в 40 Вт на расстоянии 30 м. Понятно, что данный вариант рассматривался для случая, когда местонахождение БПЛА противника неизвестно и используется ненаправленная антенна РЭБ. В нашем случае мы предполагаем использование АФАР на БПЛА типа «Орлан-10» с размерами 56 см в длину и 28 см в ширину, что как будет показано ниже, позволяет определять местонахождения БПЛА противника на дальностях порядка 6–10 км. Общий энергетический потенциал с учётом мощности усилителей АФАР (4 усилителя мощности (УМ) на 1 патч) и КНД АФАР может достигать 16 радио-модулей×4 Вт×223,87 (23,5 дБ КНД АФАР)=14328 Вт. При этом подавление приёмника «Каскад – 4М» уже возможно на дальности (143,28)1/2×100 м=1,2 км. Это сравнимо с глушением обычного навигационного приёмника ubloxM10 на расстояниях 1,5–3 км при мощности помехи в 40 Вт. Напомним, что в «Globalstar» на один элемент патч в диапазоне 2483.5–2500 MHz используется усилитель мощности в 4,5 Вт, что означает возможность повышения мощности для нашего случая, например, в 4,5 раза. Это даст подавление на дальности не в 1.2 км, а уже на дальности в 2,5 км для навигатора «Каскад-4М».
Однако этот вариант постановки помех не учитывает тот факт, что навигационные спутниковые системы не работают индивидуально с отдельным навигационным приёмником. Отсюда используемые коды спутников постоянны в течение продолжительного периода времени. Поэтому, так как траектории спутников известны, и они постоянно излучают сигналы для навигации, то коды легко выявляются на основе, например, наземных средств за счёт антенн с высоким КНД (более подробно способ выявления кодов противника будет рассмотрен несколько ниже). Затем код запоминается в течение, например, 1 мс и передаётся на БПЛА постановщик помех. Далее постановщик помех начинает ретранслировать данный код со сдвигом кода на символ во времени каждую 1 мс, при скорости передачи кода в 10 Мбит/сек и накоплении 10000 бит. Этот вариант, обеспечивает срыв символьной и частотной синхронизации в течение 10 секунд, и даёт неверное определение местоположения с меньшим энергетическим потенциалом помехи. Понятно, что с учётом расстояний от БПЛА противника до БПЛА РЭБ возможен комбинированный метод. Наше АФАР БПЛА, которое показано на рисунке 3 на 16 предлагаемых радио-модулях позволяет генерировать одновременно коды на 16 несущих частотах, что при использовании двухчастотного режима (диапазон частот L1, L2) даёт сигналы от 8 спутников навигации. Реально для определения координат БПЛА используются одновременно 4 спутника навигации, поэтому можно использовать ретрансляцию со сдвигом во времени на два символа каждую миллисекунду с излучением двух кодовых сигналов со сдвигом между ними, например, на один символ каждые 0,5 мс. В этом случае время на срыв сопровождения по кодам 4-х спутников составит 5 секунд и менее. Отсюда, если исходить из дальности подавления более 2,5 км, то кратковременное повышение мощности помехового кодового сигнала в АФАР БПЛА РЭБ на 5 секунд, с интервалами повторения через 50 сек не приведёт к перегреву УМ, но приведёт к дезориентации БПЛА противника. Наличие нескольких БПЛА РЭБ с АФАР для подавления, что связано с исключением наведения по помеховым сигналам, сократит интервал времени отсутствия помехового воздействия и приведёт к сокращению времени для получения срыва сопровождения по коду.
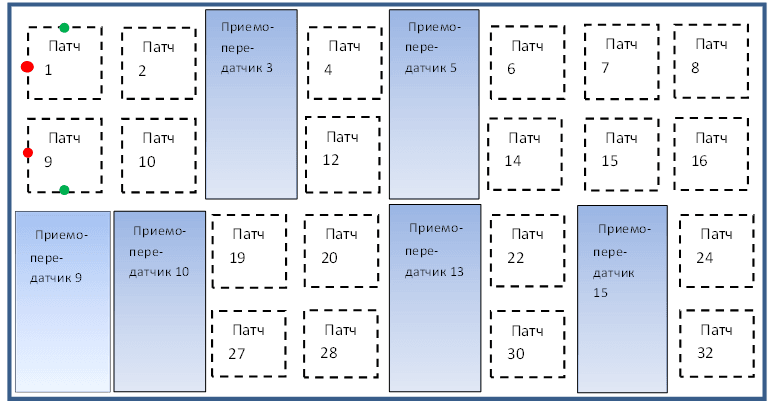
Рис. 3. АФАР БПЛА на 16 радио-модулей
При этом предлагаемый радио-модуль состоит из двух плат представленных на рисунках 4 и 5.
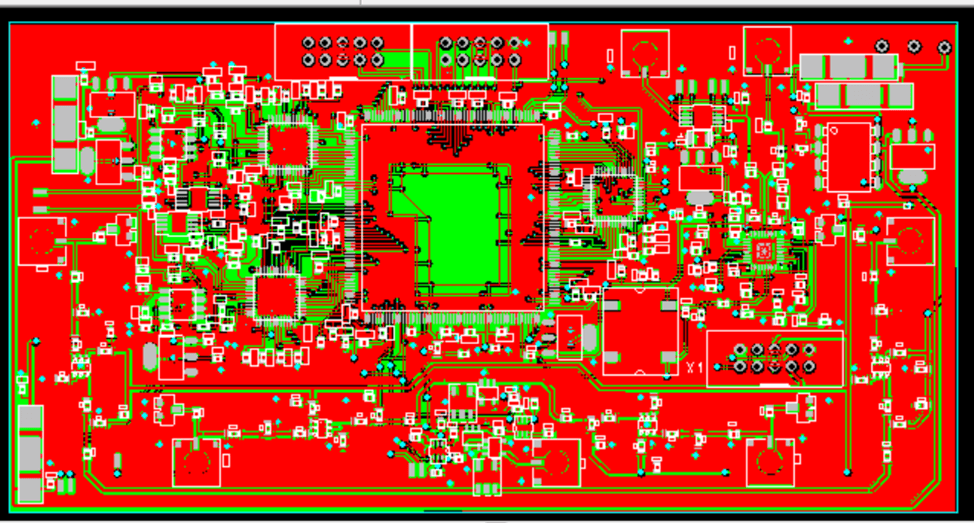
Рис. 4. Вид многослойной отладочной печатной платы 1
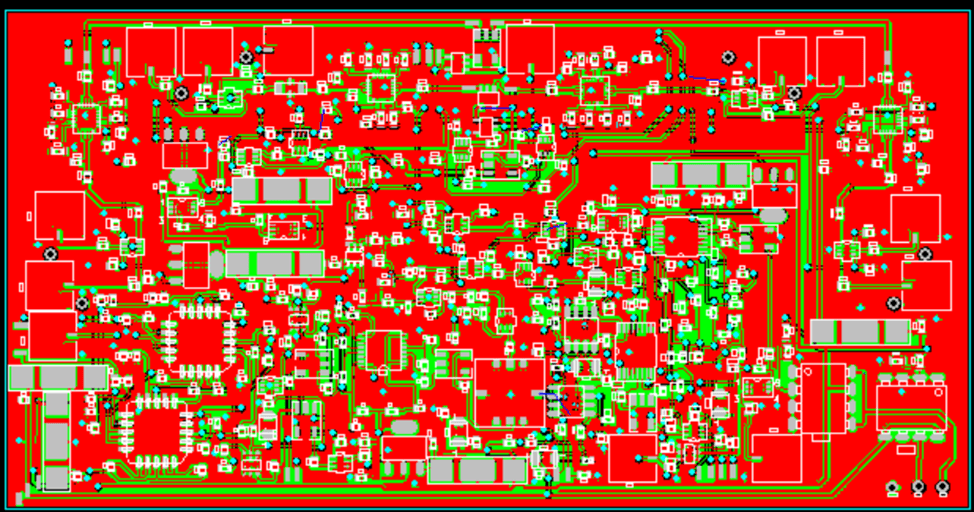
Рис. 5. Вид многослойной отладочной печатной платы 2
Их расположение в радио-модуле показано на рисунке 6.
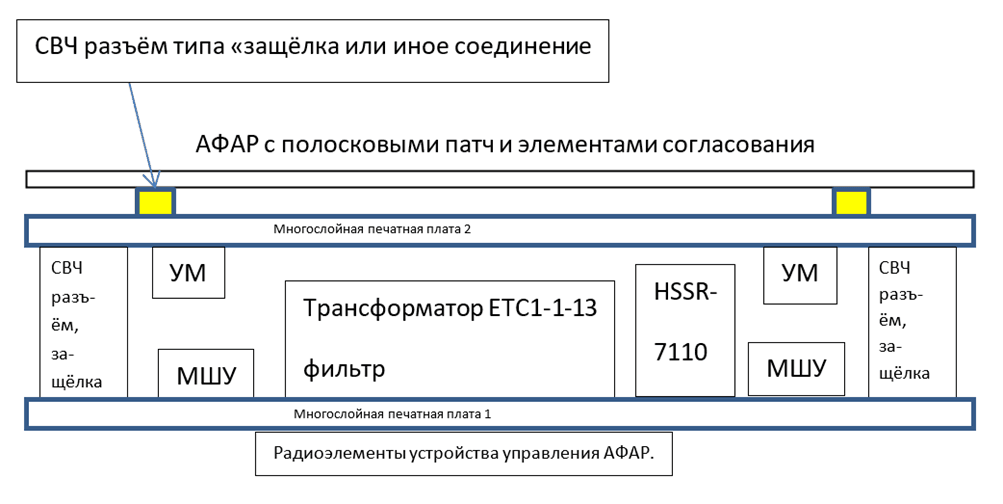
Рис. 6. Конструкция с боку предлагаемого радио-модуля с размерами 14см×7 см×2 см
Топология размещения усилителей мощности (УМ) на плате № 2 и малошумящих усилителей (МШУ) на плате № 1 соответствует созданию круговой (правой и левой) поляризации как показано на рисунке 7.
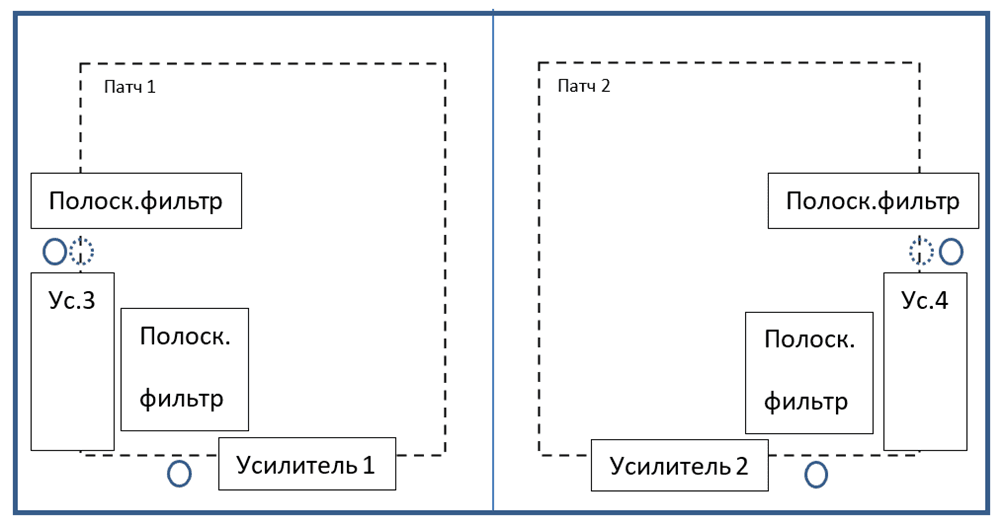
Рис. 7. Размещение усилителей на платах с наличием согласования с патч-элементами антенны
Для сравнения приводим специализированный приёмопередатчик близкий по конструкции на рисунке 8, при этом антенна является отдельным не связанным элементом и подключается через СВЧ разъём.

Рис. 8. Радио-модуль БПЛА для связи на малых дальностях
Этот радио-модуль работает в диапазоне частот от 3,4 ГГц до 3,6 ГГц и с управлением Е2Е4 KHUKRI STEALTH имеет мощность в 0,3 Вт.
Исходя из диапазона частот, данная конструкция по рисунку 8 не приспособлена по габаритам для размещения под элементами патч АФАР.
Понятно, что в концепции близкого расположения постановщика помех к БПЛА противника большое значение отводится обнаружению БПЛА противника с помощью либо АФАР БПЛА, либо любого другого РЛС.
Проведём необходимые расчёты для АФАР БПЛА при выполнении функции РЛС. Считаем коэффициент усиления луча АФАР БПЛА Gпрди=Gпрми=223,87 (23,5 дБ). Мощность от одного усилителя SZA-2044 (2-2,7 ГГц) при питании в 5 В составляет Pпрд1=1 Вт, а так как у нас 64 таких усилителя, то общая мощность Pпрди=64 Вт. Выбираем несущую частоту fи =2,4 ГГц (длина волны  ) в диапазоне работы усилителя SZA-2044 (2,2 ГГц - 2,5 ГГц). Соответственно считаем эффективную поверхность рассеяния БПЛА противника порядка (это 10 см × 10 см). Выбираем отношение сигнал/шум q=27 (вероятность ошибки для ФКМ сигнала 10-7), при шумовой температуре Тш=600 К, соответственно в формуле k – постоянная Больцмана, При дальности порядка 6 км нам для обнаружения потребуется полоса пропускания, которая вычисляется по формуле:
) в диапазоне работы усилителя SZA-2044 (2,2 ГГц - 2,5 ГГц). Соответственно считаем эффективную поверхность рассеяния БПЛА противника порядка (это 10 см × 10 см). Выбираем отношение сигнал/шум q=27 (вероятность ошибки для ФКМ сигнала 10-7), при шумовой температуре Тш=600 К, соответственно в формуле k – постоянная Больцмана, При дальности порядка 6 км нам для обнаружения потребуется полоса пропускания, которая вычисляется по формуле:
 (1)
(1)
Иными словами, при непрерывном накоплении радиосигнала в фильтре в полосе 10 кГц в течение 100 мкс, мы получим обнаружение БПЛА противника на дальности в 6 км. Надо отметить, при использовании кодового ФКМ сигнала при скорости передачи в 41 Мбит/сек мы будем принимать пятно на Земле в 3,6 метра с возможностью разрешения местоположения пика сигнала в этом пятне при такте дискретизации в 123 МГц порядка 1,2 метра (с учётом сплайнов при дискретизации по амплитуде в несколько раз точнее). Это позволяет обнаруживать цели на поверхности Земли по превышению над заданными порогами. Однако нам необходимо разбить участок по дальности обнаружения БПЛА на время передачи и обнаружения за счёт скважности сигнала. При этом необходимо учесть скорость движения БПЛА противника и значение доплеровской частоты. Пусть скорость БПЛА противника 250 км/час (Vбпла=69,45 м/сек) несущая частота для обнаружения БПЛА f=2,4 ГГц, отсюда вычислим доплеровскую частоту Fд по формуле:
|
|
(2) |

В этом случае мы при обнаружении БПЛА противника в режиме передачи и приёма можем использовать скважность Q=10. Это позволит снизить потребляемую мощность при режиме обнаружения БПЛА противника в 10 раз. За 1 мс БПЛА противника может переместиться на величину 0,06945 м. Это означает, что луч АФАР может в режиме обнаружения принимать ещё 20 положений по углу азимута и места с изменением положения БПЛА противника на 1,389 метра, если исходить из символьной синхронизации для импульсов в коде в 38 Мбит/сек.
Учтём, что у нас коэффициент усиления антенны нашего АФАР GАФАР=223,87 (23,5 дБ). Отсюда вычислим диаграмму направленности в градусах по уровню 0,5 как по азимуту, так и по углу места по формуле (3):
|
|
(3) |

С учётом того, что по углу места она должна быть в 2 раза шире. Подставив значение GАФАР в формулу (3),  . Если считать, что по азимуту будет 10 положений, а положений по углу места при этом может быть два, то сектор обзора составит 89 градусов по азимуту и 35,6 градуса по углу места. В данном случае мы выбрали рубеж по дальности в 6 км, при котором будет происходить обнаружение БПЛА противника в режиме поиска по угловым координатам. Учитывая, что у нас в режиме накопления используются импульсы порядка 38 Мбит/сек с тактом дискретизации в 152 МГц, то символьная синхронизация по коду будет обеспечена, так как мы имеем 4 строба при накоплении отстоящих на величину такта в 152 МГц, что даёт расхождение по дальности в 0,9868 метра. Поэтому за 4 строба (это в сумме 3,95 метра при анализе общего строба) при накоплении в режиме обнаружения, отражённый сигнал от БПЛА противника выйти не может в течение 20 мс. Однако нам желательно увеличить дальность обнаружения до 10 км и более. Это можно обеспечить за счёт увеличения мощности каждого усилителя в импульсе до 4,5 Вт, что даст увеличение дальности до 8,7 км, или за счёт увеличения времени накопления, а это достигается увеличением времени накопления с 1 мс до 10 мс. В этом случае дальность обнаружения по формуле (1) составит величину 6,1 км×101/4=10,84 км. Предположим, что один БПЛА РЭБ обслуживает по обнаружению БПЛА противника линию соприкосновения в 10 км на дальности от линии соприкосновения в 10 км. Тогда сектор углового обзора равен ±30 градусов по азимуту. На дальности в 10 км при высоте полёта БПЛА до 6 км (это максимальный потолок для БПЛА «Орлан-10») сектор обзора составит 35,6 градуса. Таким образом, мы имеем 14 необходимых угловых положений на дальности обнаружения в 10 км. Так как время накопления 10 мс, то есть увеличилось в 10 раз, то луч АФАР должен находиться в выбранном положении в 10 раз дольше. В этом случае общее время поиска при обнаружении увеличится в 10 раз и с учётом 14 угловых положений составит 140 мс. За это время БПЛА противника при скорости в 250 км/ч переместится на 9,7 м. Так как мы имеем 4 строба в одном ПЛИС отстоящих на величину такта в 152 МГц при накоплении кода в фильтре в 100 Гц при скорости передачи в 38 Мбит/сек, то это даёт расхождение по дальности в 0,9868 метра. Это означает, что нам надо снизить скорость передачи кода с 38 Мбит/сек до 3,8 Мбит/сек. То есть, в начальный период времени при обнаружении можно использовать временное стробирование не с величиной 38 Мбит/сек, а в 10 раз меньше, вплоть до 1 Мбит/сек и после обнаружения далее увеличивать точность определения БПЛА противника по дальности. Преимущество перехода на 3,8 Мбит/сек заключается и в том, что подстройка по частоте Доплера по ФАПЧ может уже производиться внутри ПЛИС с наличием промежуточной частоты порядка 9,5–19 МГц. Понятно, что при сужении полосы пропускания потребуется использование параллельной фильтрации для выявления БПЛА по доплеровской частоте, и это может потребовать использование всех 16 ПЛИС радио-модулей с разнесением на 16 полос по частоте Доплера при фильтрации. Надо отметить, что если совместить режим скважности при Q=2 излучаемого сигнала в режиме РЛС с поиском по направлению, с учётом возможного времени прихода сигнала из-за задержки по дальности, то можно сохранить скорость в 38 Мбит/сек без ухода из строба символьной синхронизации. Это связано с тем, что радиосигнал за 1 мкс проходит 300 м. При прохождении 10 км задержка сигнала от передачи до прихода составляет100 мкс /3=33 мкс. Как было подсчитано по формуле (1) при дальности в 10 км нам требуется накопление сигнала в течение 1 мс. Это означает, что мы должны иметь накопление как минимум из 30 пачек по 33 мкс со скважностью 2. Таким образом, время положения луча в одном направлении составит 2 мс, а общее время обзора при 14-ти направлениях луча АФАР составит 28 мс. За это время при скорости в 250 км/час БПЛА переместится на 69,45 м/сек ×0,028 сек=1,944 метра. Так как общий строб из 4-х при тактах дискретизации в 152 МГц составляет 3,95 метра, то мы можем допустить скважность Q=4. Однако такое преимущество при использовании 38 Мбит/сек связано с увеличением энергетических потерь при передаче по сравнению со скважностью равной 10 в 2,5 раза. Поэтому для достижения скважности порядка 10, можно сократить сектор обзора с увеличением количества БПЛА, выполняющих функцию РЛС.
. Если считать, что по азимуту будет 10 положений, а положений по углу места при этом может быть два, то сектор обзора составит 89 градусов по азимуту и 35,6 градуса по углу места. В данном случае мы выбрали рубеж по дальности в 6 км, при котором будет происходить обнаружение БПЛА противника в режиме поиска по угловым координатам. Учитывая, что у нас в режиме накопления используются импульсы порядка 38 Мбит/сек с тактом дискретизации в 152 МГц, то символьная синхронизация по коду будет обеспечена, так как мы имеем 4 строба при накоплении отстоящих на величину такта в 152 МГц, что даёт расхождение по дальности в 0,9868 метра. Поэтому за 4 строба (это в сумме 3,95 метра при анализе общего строба) при накоплении в режиме обнаружения, отражённый сигнал от БПЛА противника выйти не может в течение 20 мс. Однако нам желательно увеличить дальность обнаружения до 10 км и более. Это можно обеспечить за счёт увеличения мощности каждого усилителя в импульсе до 4,5 Вт, что даст увеличение дальности до 8,7 км, или за счёт увеличения времени накопления, а это достигается увеличением времени накопления с 1 мс до 10 мс. В этом случае дальность обнаружения по формуле (1) составит величину 6,1 км×101/4=10,84 км. Предположим, что один БПЛА РЭБ обслуживает по обнаружению БПЛА противника линию соприкосновения в 10 км на дальности от линии соприкосновения в 10 км. Тогда сектор углового обзора равен ±30 градусов по азимуту. На дальности в 10 км при высоте полёта БПЛА до 6 км (это максимальный потолок для БПЛА «Орлан-10») сектор обзора составит 35,6 градуса. Таким образом, мы имеем 14 необходимых угловых положений на дальности обнаружения в 10 км. Так как время накопления 10 мс, то есть увеличилось в 10 раз, то луч АФАР должен находиться в выбранном положении в 10 раз дольше. В этом случае общее время поиска при обнаружении увеличится в 10 раз и с учётом 14 угловых положений составит 140 мс. За это время БПЛА противника при скорости в 250 км/ч переместится на 9,7 м. Так как мы имеем 4 строба в одном ПЛИС отстоящих на величину такта в 152 МГц при накоплении кода в фильтре в 100 Гц при скорости передачи в 38 Мбит/сек, то это даёт расхождение по дальности в 0,9868 метра. Это означает, что нам надо снизить скорость передачи кода с 38 Мбит/сек до 3,8 Мбит/сек. То есть, в начальный период времени при обнаружении можно использовать временное стробирование не с величиной 38 Мбит/сек, а в 10 раз меньше, вплоть до 1 Мбит/сек и после обнаружения далее увеличивать точность определения БПЛА противника по дальности. Преимущество перехода на 3,8 Мбит/сек заключается и в том, что подстройка по частоте Доплера по ФАПЧ может уже производиться внутри ПЛИС с наличием промежуточной частоты порядка 9,5–19 МГц. Понятно, что при сужении полосы пропускания потребуется использование параллельной фильтрации для выявления БПЛА по доплеровской частоте, и это может потребовать использование всех 16 ПЛИС радио-модулей с разнесением на 16 полос по частоте Доплера при фильтрации. Надо отметить, что если совместить режим скважности при Q=2 излучаемого сигнала в режиме РЛС с поиском по направлению, с учётом возможного времени прихода сигнала из-за задержки по дальности, то можно сохранить скорость в 38 Мбит/сек без ухода из строба символьной синхронизации. Это связано с тем, что радиосигнал за 1 мкс проходит 300 м. При прохождении 10 км задержка сигнала от передачи до прихода составляет100 мкс /3=33 мкс. Как было подсчитано по формуле (1) при дальности в 10 км нам требуется накопление сигнала в течение 1 мс. Это означает, что мы должны иметь накопление как минимум из 30 пачек по 33 мкс со скважностью 2. Таким образом, время положения луча в одном направлении составит 2 мс, а общее время обзора при 14-ти направлениях луча АФАР составит 28 мс. За это время при скорости в 250 км/час БПЛА переместится на 69,45 м/сек ×0,028 сек=1,944 метра. Так как общий строб из 4-х при тактах дискретизации в 152 МГц составляет 3,95 метра, то мы можем допустить скважность Q=4. Однако такое преимущество при использовании 38 Мбит/сек связано с увеличением энергетических потерь при передаче по сравнению со скважностью равной 10 в 2,5 раза. Поэтому для достижения скважности порядка 10, можно сократить сектор обзора с увеличением количества БПЛА, выполняющих функцию РЛС.
Принципы постановки помех БПЛА противника средствам связи также не могут обойтись без определения местоположения. Здесь близость к БПЛА противника позволяет достаточно точно и за короткий срок времени определять сигнал информации от БПЛА до КПУ, и наоборот. По сути, мы имеем войну между БПЛА, когда они используются и как средства связи, навигации, РЛС, РТР, подавления с помощью помех и как средства уничтожения. В случае подавления при РЭБ эффективно использовать ответные ретрансляционные помехи. Здесь, сигнал связи от БПЛА противника или его командного пункта управления (КПУ) принимается одним БПЛА РЭБ с АФАР и для обеспечения развязки по несущей частоте передаётся на низкой частоте на другой БПЛА РЭБ с АФАР. На втором БПЛА РЭБ с АФАР с учётом кода, переданного по низкой частоте, осуществляется восстановление сигнала на несущей частоте с формированием псевдослучайного шумового сигнала (ПШС) в направлении на БПЛА противника или КПУ противника. Знание местоположения БПЛА противника позволяет располагать БПЛА РЭБ ближе к КПУ противника с улучшением энергетического потенциала и чувствительности. Соответственно сигнал от БПЛА противника к КПУ противника при передаче картинки изображения местности будет искажён сигналом БПЛА РЭБ, что в сочетании с подавлением спутниковой навигации приведёт к потере БПЛА. Сигнал от КПУ противника до БПЛА противника также будет подвержен воздействию ретранслируемых ответных помех, что не даст возможности управлять БПЛА. Однако при выявлении наличия постановки помех и определения местоположения БПЛА РЭБ есть риск уничтожения такого БПЛА РЭБ. В этом случае необходимо применять гибкую динамическую модель из нескольких БПЛА РЭБ, при которой постановка помех осуществляется периодически каждым БПЛА РЭБ с одновременным прикрытием порядков БПЛА РЭБ по дальности из-за динамики движения вперёд-назад при наличии ответных ретрансляционных помех средствам РЛС противника. Соответственно при этом надо иметь общую картину по местоположению БПЛА РЭБ, что обеспечивается средствами навигации и связи. Такой метод эффективен и при прорыве ПВО противника любыми летательными аппаратами. Выигрыш в противостоянии средств будет в этом случае определяться количеством БПЛА и качеством радиоэлектронных средств, и здесь большую роль будет играть качество, массовость производства и дешевизна. В настоящее время получает распространение связь БПЛА через спутниковую систему «Starlink», однако метод подавления здесь аналогичен методу, описанному выше с той лишь разницей, что БПЛА РЭБ располагается между спутником «Starlink» и БПЛА противника на соответствующей высоте с учётом постановки помех на заданный диапазон несущих частот.
Следует отметить, что низкая помехозащищённость систем спутниковой навигации, а также спутниковой связи приводит к тому, что если даже на БПЛА происходит обнаружение воздействия помех, то единственной мерой спасения БПЛА является уход из зоны ТВД, без выполнения поставленной задачи по предыдущим априорным данным. Но это в случае, если удалось вовремя идентифицировать помеху по виду практически неотличимую от кодового сигнала связи или навигации. Соответственно обеспечить при этом групповую защиту невозможно. Поэтому дополнительное преимущество предлагаемого радио-модуля заключается в возможности использования его для индивидуальных систем навигации между КПУ и БПЛА вместо спутниковых систем навигации и связи, как это было нами ранее предложено [1-8] по запросно-ответной системе с использованием суммарно-разностного метода.
Соответственно на основе принципов работы необходимо определить энергетические затраты с использованием 2 плат радио-модуля в режиме приёма и передачи. Принцип работы АФАР БПЛА на основе функциональных схем был нами описан в [6-8]. Здесь для оценки энергетических потерь мы приведём функциональные схемы с определением энергетических затрат. Функциональная схема предлагаемого радио-модуля из плат № 1 и № 2 представлена на рисунке 9.
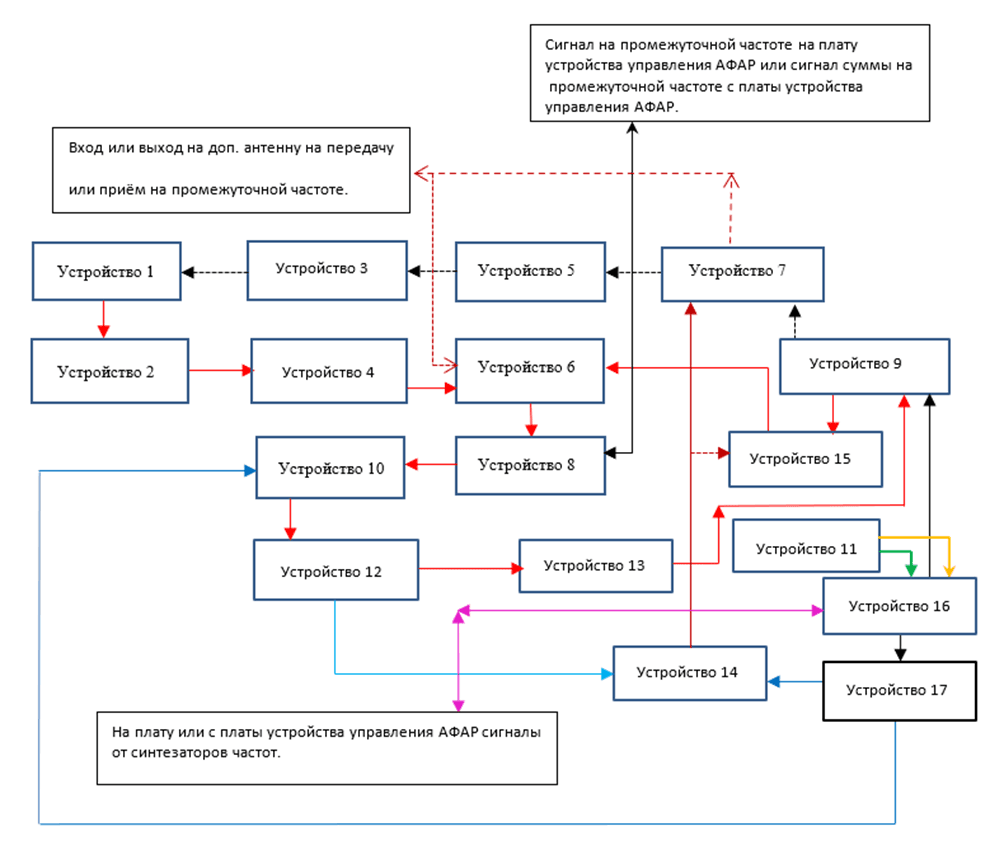
Рис. 9. Функциональная схема предлагаемого радио-модуля
Радио-модуль состоит из следующих устройств. Устройство 1 представляет собой патч-антенны с наличием согласующих элементов по коэффициенту стоячей волны (КСВ) и полосковых линий для достижения оптимальной круговой поляризации на соответствующих слоях многослойной печатной платы АФАР. Понятно, что альтернативы патч-антеннам в диапазоне от 250 МГц до 6 ГГц нет в силу обеспечения наибольшей эффективной поверхности рассеяния (ЭПР) [7, с. 26-53], что повышает чувствительность. Вопрос касается обеспечения такого конструктивного решения на патч-антеннах, которое позволяло бы обеспечить все виды поляризаций для повышения помехозащищённости с минимальными энергетическими потерями и наибольшей чувствительностью. Это достигается за счёт элементов согласования в многослойной печатной плате АФАР, выбором диэлектрика в зазоре патч-антенны, и симметричного расположения усилителей мощности (УМ), а также малошумящих усилителей (МШУ) так, как показано на рисунке 7. Причём, чтобы нагрев УМ не влиял на МШУ, эти усилители разнесены на платы № 2 (рис. 5) и № 1 (рис. 4), как показано на рисунке 8 с видом с боку. Сигнал с патч-антенн поступает на устройство 2, которое состоит из 4-х малошумящих усилителей (МШУ), расположенных соответствующим образом на многослойной печатной плате № 1 по рисунку 7 (аналогичное размещение УМ, но на плате № 2). При приёме сигналы с устройства 2 от 4-х МШУ поступают на устройство 4 (расположено на плате № 1). Устройство 4 на рисунке 9 представляет собой сумматоры от 4-х сигналов с МШУ (для расширения диапазона частот возможен вариант выполнения сумматоров и делителей на трансформаторах или других радиоэлементах), а также фазоинвертор на 180 градусов с использованием ключей и трансформатора для обеспечения круговой поляризации как правой, так и левой. Кроме того, для обеспечения одинаковой фазы в двух патч, усилители, расположенные с двух противоположных крайних сторон этих патч, возбуждаются в противофазе от одного трансформатора, но с разных выводов вторичной обмотки (возможен и иной способ получения сигналов в противофазе). Это даёт синфазный сигнал электромагнитных полей в двух патч в горизонтальной плоскости. Далее суммарный сигнал поступает на устройство 6 (плата № 2). Устройство 6 – это МШУ со смесителем, где происходит смещение радиосигнала на промежуточную частоту порядка 300–400 МГц. Одновременно в устройстве 9 (балансный модулятор (БМ) на плате № 2), на основе синтезатора частоты 11 (верхняя сторона платы № 1) через ключи устройства 16 (находятся на нижней стороне платы № 1, там, где располагаются радиоэлементы управления АФАР, с подключением через металлизированные отверстия) формируются гетеродинная частота или несущая частота сигнала с информацией (помехой). Если радио-модуль используется отдельно, в качестве мобильного устройства связи абонента, то металлизированные отверстия входа и выхода от управляющей платы АФАР соединяются на верхней стороне платы № 1 через разделительные конденсаторы соответствующей величины и это обеспечивает унификацию применения радио-модулей. Соответственно, при режиме АФАР сигнал информации или помехи на несущей частоте, через ключевое устройство 16, поступает от управляющей платы АФАР, что будет показано ниже при рассмотрении функциональной схемы платы управления АФАР. В БМ (устройство 9 на плате № 2) мы имеем необходимое изменение фазы для многолучевого режима АФАР, либо происходит модуляция информацией (помехой) при отдельной работе каждого радио-модуля. С этой целью сигналы изменения фазы (или информации) поступают от ПЛИС (устройство 12 на верхней стороне платы № 1) через устройство 13 (цифро-аналоговый преобразователь (ЦАП) на верхней стороне платы № 1). При этом, устройство 9 представляет собой не только балансный модулятор, но в него входят также усилитель с ключами, для обеспечения переключения сигнала с его выхода, либо на смеситель устройства 6 при приёме, либо на предусилитель (устройство 7 на плате № 2) для передачи информации или сигнала помехи на несущей частоте, а также с устройства 7 через ключ осуществляется подключение к выходу дополнительной низкочастотной антенны для обеспечения режима дуплекса. Таким образом, при приёме и обнаружении сигнала информации, сформированная гетеродинная частота сигнала от устройства 9 через ключ (устройство 15 на плате № 2) поступает на смеситель в устройстве 6. Далее сигнал после переноса на промежуточную частоту порядка 300–400 МГц поступает на устройство 8 (плата № 2). Это устройство 8 состоит из предусилителя после смесителя в устройстве 6, фильтра для исключения сигнала на несущей частоте и частоте гетеродина, логарифмического усилителя на 100 дБ и двух ключей переключения. Два соединённых ключа устройства 8 дают сигнал, либо на вход устройства управления АФАР (нижняя часть многослойной печатной платы № 1), для использования сигнала промежуточной частоты в режиме АФАР, либо на вход смесителей (устройство 10 на плате № 2) для формирования сигналов в квадратуре на нулевой промежуточной частоте (в режиме обнаружения сигнала, радиоуправления БПЛА, связи и навигации). То есть, ключи в устройстве 8 задействованы таким образом, что при использовании в качестве мобильного устройства радио-модуля, сигнал с выхода логарифмического усилителя сразу поступает на балансные усилители устройства 10. В режиме АФАР с помощью ключей передача сигнала промежуточной частоты осуществляется через СВЧ разъём типа «защёлка» на верхнюю часть платы № 1, а далее сигнал через металлизированное отверстие (или СВЧ кабель) поступает на нижнюю часть платы № 1. Кроме того, в режиме АФАР при приёме, в устройстве 8 предусматривается, через ключи на управляющей плате АФАР обратное поступление суммарного сигнала промежуточной частоты с учётом сложения фаз от всех радио-модулей АФАР. В этом случае промежуточный суммарный сигнал также через отдельное металлизированное отверстие поступает с нижней части платы №1 на верхнюю часть, и далее через соответствующий СВЧ разъём типа «защёлка» поступает в устройство 8, и через ключи этого устройства на балансные смесители устройства 10. Иными словами, по сравнению с исполнением радио-модуля для абонентов, отличие в использовании в режиме АФАР касается дополнения двух ключей в плате № 2 (устройство 8). Одновременно, в режиме АФАР, в плате № 1 сигналы в противофазе от синтезатора частоты поступают не через разделительные конденсаторы на БМ (устройство 9 на плате № 2) и делитель частоты (устройство 17 на плате № 1), а через металлизированные отверстия на контактах удалённых в системе АФАР разделительных конденсаторов на плате № 1, находящихся на выходах синтезатора частоты. То есть в режиме АФАР прямое подключение через разделительные конденсаторы подменяется подключением через управляющую плату (УП) АФАР, находящуюся снизу платы № 1. Через металлизированные отверстия сигналы поступают на ключи устройство 16 на обратной стороне платы № 1, где находятся радиоэлементы управляющей платы. Сама функциональная схема управляющей платы АФАР показана на рисунке 10.
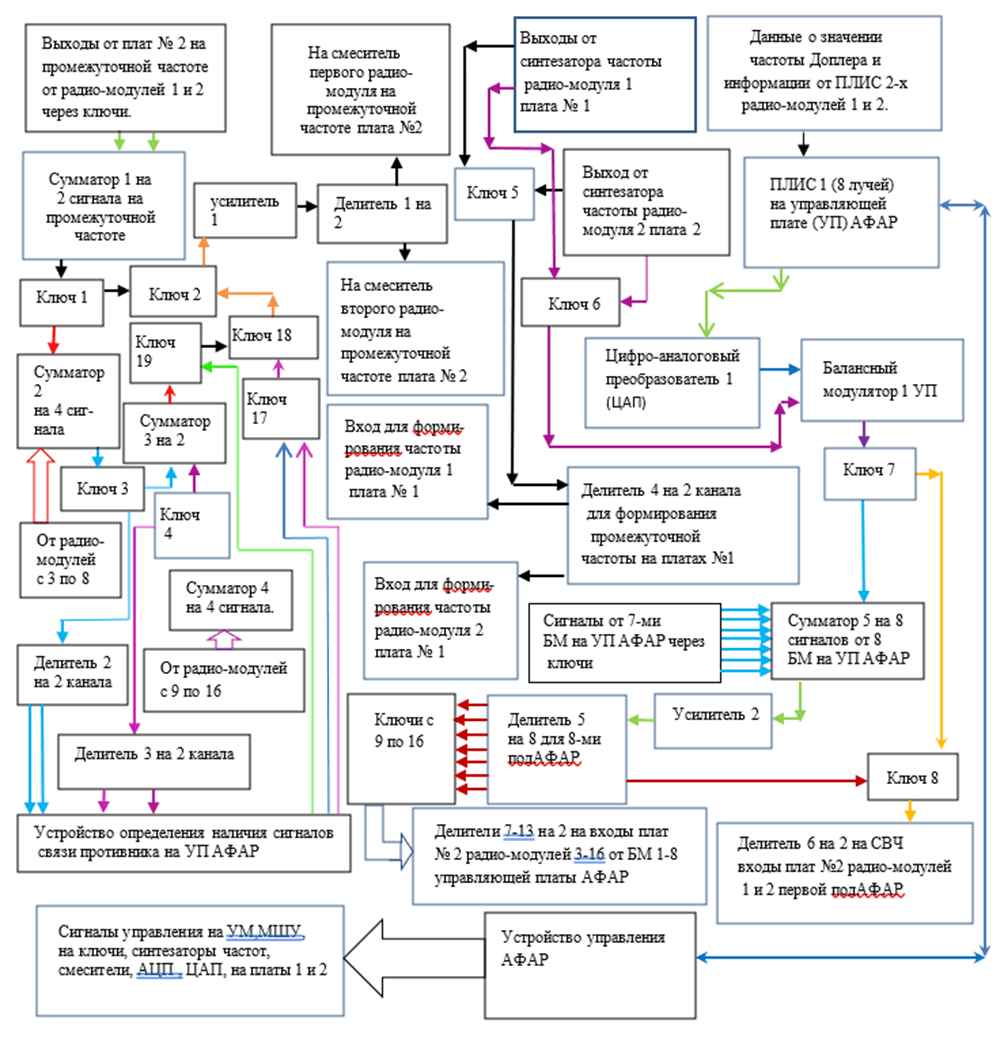
Рис. 10. Функциональная схема управляющей платы (УП) АФАР
Учитывая многофункциональность АФАР как средства связи, навигации, РЛС, определения источника сигналов противника и постановщика помех, мы рассмотрим принципы работы при различных режимах управляющей платы АФАР с учётом [8, с. 23-51]. Это определяется тем, что метод постановки помехи, который мы будем формировать, связан также с выделением сигнала информации от БПЛА противника для формирования ретрансляционной помехи. Иными словами, самая лучшая помеха эта та, которая имеет полную идентификацию с подавляемым сигналом, а для этого надо уметь выделять подавляемый сигнал. С этой целью предлагается следующий способ выделения сигнала, который описан ниже.
При приёме сигналов связи от БПЛА или отражённых сигналов от БПЛА на несущей частоте в радио-модулях, происходит их преобразование на промежуточную частоту, что необходимо для дальнейшего использования суммирования сигналов в режиме АФАР. На следующем этапе сигналы на промежуточной частоте порядка 300–400 МГц от радио-модулей 1-16 поступают с устройств 8 (плата № 2) через ключи в устройстве 8 на УП АФАР по рисунку 9 и рисунку 10. Далее эти сигналы на промежуточной частоте суммируются попарно от двух радио-модулей с образованием 8-ми подАФАР, что также используется для связи и со своими абонентами [8, с. 23-51]. На рисунке 10 это показано через сумматор 1. После суммирования общий сигнал от двух радио-модулей поступает на ключи (на рис. 10 – это ключ 1). В устройстве управления АФАР (рис. 10) определяется режим работы. В одном положении ключей 1 и 2 в режиме связи при 8 подАФАР общий сигнал от двух радио-модулей на промежуточной частоте поступает после усиления (усилитель 1) на делитель 1, где делится на 2 сигнала. Эти сигналы с учётом фазы луча подАФАР поступают обратно на балансные смесители (устройство 10 плата № 2) через СВЧ разъём типа «защёлка». На другие входы этих балансных смесителей поступают сигналы промежуточной частоты (устройство 10 (плата № 2) на рис. 9) в квадратуре от сигнала синтезатора частоты одного из двух попарно-объединённых радио-модулей. Далее в радио-модулях эти сигналы с платы № 2 поступают на плату № 1 на дифференциальные операционные усилители, и затем на АЦП и ПЛИС (плата № 1 радио-модуля). Отметим ещё раз, что сигнал дискретизации, поступающий на АЦП от ПЛИС в объединённых радио-модулях, может иметь прямой и инверсный вид. В результате точность оцифровки повышается в 2 раза с уменьшением шумов квантования. Это улучшает и точность определения местоположения при использовании радио-модулей АФАР для навигации также в 2 раза без учёта применения сплайнов по амплитуде. В ПЛИС каждого из объединённых радио-модулей (плата № 1 радио-модулей) осуществляется обработка принимаемого сигнала с выявлением частоты Доплера (уровень управляющего напряжения) и сигнала информации (биты информации с тактом считывания). Эти данные, возможно через общее устройство управления, поступают на соответствующий из восьми ПЛИС (он обозначен на рис. 10 в единственном числе как ПЛИС 1) на плате УП АФАР исходя из формирования 8-ми лучей. В ПЛИС 1 (рис. 10) на плате УП АФАР одного из 8-ми (рис. 10) осуществляется оценка результатов полученных данных, с ПЛИС попарно объединённых радио-модулей по рисунку 9. Полученное значение управляющего напряжения для частоты Доплера используется для подстройки через сигналы по синусу и косинусу (по уровню сигнала полученного от ПЛИС радио-модулей), поступающие на ЦАП 1 (рис. 10) и далее на балансный модулятор БМ 1 УП. Одновременно с двух выходов каждого синтезатора частоты с попарно объединённых радио-модулей для формирования 8-ми лучей расположенных на плате № 1 по Рис.9 (один из возможных режимов для связи), на плату УП АФАР поступают сигналы разной высокой (несущей или гетеродинной) частоты на ключи 5 и 6 по рисунку 10. С помощью ключей 5 и 6 определяется частота сигнала, которая будет использоваться для формирования двойной промежуточной частоты. Эта частота сигнала через СВЧ разъём типа «защёлка» будет поступать с платы № 1 на балансные смесители платы № 2 (устройство 10) через делители частоты на 2 (формирование сигналов в квадратуре). Надо отметить, что частота сигнала может быть выбрана такой, что будет обеспечиваться перенос частоты сигнала информации не на нулевую промежуточную частоту, а вторую промежуточную частоту порядка 15–30 МГц. Такой вариант возможен и при обработке сигнала связи противника при радиотехнической разведке (РТР). Это позволяет осуществлять подстройку по частоте Доплера внутри ПЛИС радио-модуля, но со снижением скорости передачи информации до 10 Мбит/сек и менее (данный режим может использоваться и для выполнения функции РЛС). Одновременно с помощью ключей 5 и 6 определяется и частота сигнала, которая будет использоваться в качестве гетеродинного сигнала с поступлением на БМ 1 УП (рис. 10). Возможны как одинаковые частоты сигналов при формировании промежуточной и основной частоты, так и разные. Далее через ключ 7 и ключ 8 и делитель 6, сигнал гетеродина со смещением по частоте Доплера через СВЧ разъём типа «защёлка» с платы № 1 поступает на устройства 9 плат № 2 (рис. 9) двух попарно-объединённых радио-модулей. В устройстве 9 плат № 2 сигнал гетеродина поступает на балансный модулятор, который изменяет фазу сигнала и обеспечивает управление лучом одной из восьми подАФАР в данном режиме работы. Соответственно при приёме этот сигнал поступает на смеситель (устройство 6 на плате № 2) через ключ (устройство 15 плата № 2) на рисунке 9. Этим самым обеспечивается приём сигнала на несущей частоте с замыканием ФАПЧ с подстройкой по частоте Доплера и выделением сигнала информации в ПЛИС радио-модулей в режиме 8-ми лучей.
Следующий режим работы при приёме сигналов в варианте одного или 2-х лучей АФАР заключается в том, что через ключ 1 УП АФАР сигнал от двух объединённых попарно радио-модулей поступает на сумматор 2 для 4 сигналов от радио-модулей 1-8. С сумматора 2 для 4-х сигналов от радио-модулей 1-8 общий сигнал поступает на ключ 3. Аналогично с сумматора 4 для 4-х сигналов от радио-модулей 9-16 общий сигнал поступает на ключ 4. В режиме общего одного луча АФАР сигналы с ключей 3 и 4 (рис. 10) поступают на сумматор 3. Полученный общий сигнал на промежуточной частоте с принимаемой информацией поступает на ключ 19 и далее через ключ 18 на ключ 2 и с него через усилитель 1 на делитель 1. После деления на два сигнала в делителе 1 сигналы поступают на балансные смесители объединённых попарно радио-модулей 1 и 2 на плате № 2 (устройство 10 на рис. 9). На следующем этапе сигналы на нулевой промежуточной частоте с разделением по синусу и косинусу с платы № 2 радио-модулей 1 и 2 поступают на соответствующие АЦП и ПЛИС плат № 1, в результате чего осуществляется выделение информации и определение сдвига по частоте Доплера. Данные о частоте Доплера поступают на ПЛИС 1 на управляющей плате АФАР (рис. 10), а информация поступает на устройство управления АФАР. Здесь надо учесть, что каждый из 8-ми вариантов объединённых попарно радио-модулей имеет аналогичную схему приёма в многочастотном режиме связи, РЛС и РТР. Формирование общего гетеродинного сигнала на все радио-модули 1-16 осуществляется аналогично тому, как это было показано для одного луча из восьми подАФАР, с той разницей, что через ключ 7 сигнал гетеродина поступает вначале на сумматор 5, а не сразу на ключ 8. Сигналы от других БМ УП АФАР в этот момент при отсутствии многочастотного режима при приёме не поступают. С сумматора 8 сигнал поступает на усилитель 2. После усиления общий сигнал гетеродина с учётом сдвига по частоте Доплера поступает на делители 7-13 и ключи 8-16. Далее сигнал поступает на устройство 9 (рис. 9) всех 16 радио-модулей через делители 6-13. При режиме передачи при наличии одного общего луча АФАР возможен многочастотный параллельный режим передачи информации одновременно 8-ми абонентам или формирование помеховых кодов для систем навигации БПЛА противника. В этом случае со всех 8-ми ПЛИС УП АФАР (на рис. 10 имеет обозначение как ПЛИС 1) поступают сигналы информации через соответствующие восемь ЦАП на восемь БМ УП АФАР (они на рис.10 не показаны в силу идентичности). На вторые входы БМ УП АФАР поступают (от 8-ми из 16 синтезаторов частот радио-модулей) сигналы несущих частот. Промодулированные информацией сигналы несущих частот через соответствующие ключи 7 поступают на сумматор 5 для суммирования 8-ми сигналов на несущих частотах с информацией или кодами помех. Далее через усилитель 2 сигналы поступают через ключи на соответствующие радио-модули в устройство 9 по рисунку 9. В балансном модуляторе устройства 9 к сигналу передачи добавляется фаза для обеспечения нужного направления луча. Надо отметить, что оставшиеся синтезаторы частоты в радио-модулях могут использоваться для приёма сигналов информации от дополнительной антенны на промежуточной частоте в режиме дуплекса. Понятно, что в режиме приёма на высокой гетеродинной частоте также организуется режим дуплекса для передачи информации на промежуточной частоте. Собственно режим дуплекса при связи на промежуточной частоте позволяет в скрытом режиме осуществлять как поиск, обнаружение и вызов с обеспечением временной синхронизации по аналогии с протоколом связи как это сделано в спутниковой системе связи «Iridium».
Понятно, что перед тем, как создать помеховый сигнал необходимо определить параметры сигналов связи противника. При анализе будем ориентироваться на параметры радио-модуля, представленного на рисунке 8. Здесь была получена чувствительность при шумоподобном сигнале (ШПС) минус 105 дБм при скорости передачи 0,55 Мбит/сек, а при QPSK ½ чувствительность достигала минус 88 дБм при 4,5 мбит/сек. Остальные варианты сигналов связи приведённые по рисунку 8 обладают низкой чувствительностью, а значит и помехоустойчивостью, поэтому здесь можно использовать традиционное подавление обычной шумовой ретрансляционной помехой в полосе сигнала.
Исходя из возможной полосы для данной чувствительности в 7 МГц по рисунке 8, ясно, что в первом случае используется фазо-кодо-манипулированный сигнал (ФКМ) с использованием псевдокода как минимум в 13 бит. При сигнале QPSK ½ также может использоваться кодовый сигнал. Варианты выделения информации при кодовом накоплении ФКМ сигнала (BPSK), а также сигнала QPSK ½ представлены на рисунках 11 и 12.
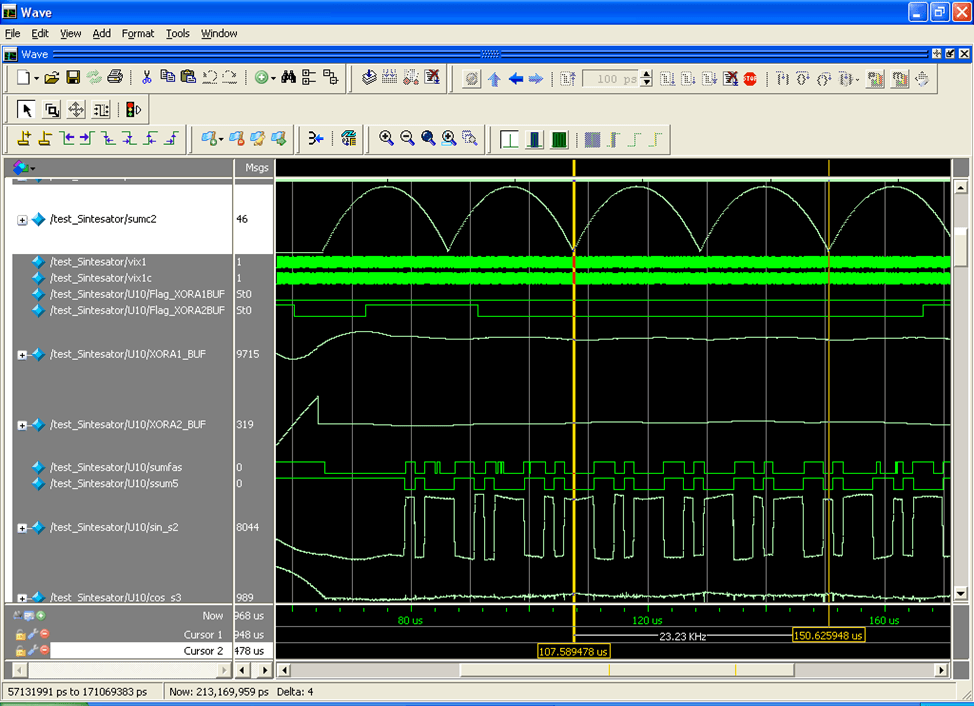
Рис. 11. Выделение BPSK на основе непрерывного цифрового фильтра по каналу синуса и выделение сигнала ФАПЧ по каналу косинуса при частоте Доплера в 23 кГц и передаче сигнала информации в 5,4 Мбит/сек. Это соответствует скорости передачи телевизионного изображения в аналоговом виде
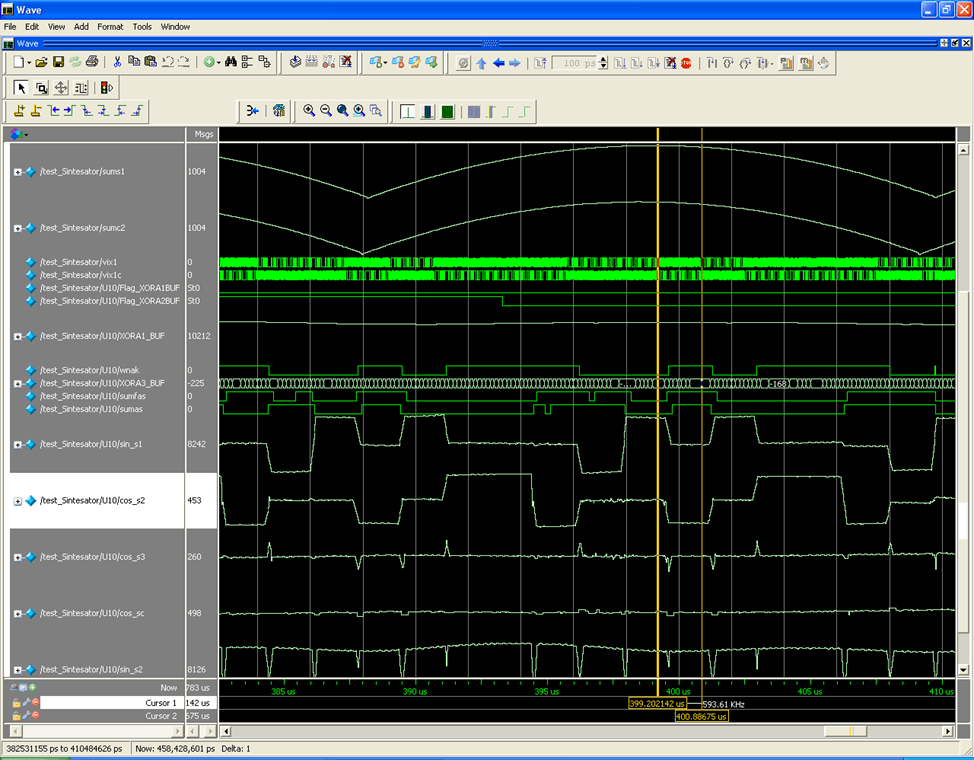
Рис. 12. Выделение информации на выходе непрерывных цифровых фильтров по синусу и косинусу при использовании QPSK сигнала при коде в 64 бита
Однако и в том и другом случае при обработке сигнала используется символьная синхронизация и необходима подстройка по частоте Доплера с помощью ФАПЧ, иначе совпадения с эталонным сигналом для выделения информации получить невозможно.
Так как мы хотим поставить эффективную помеху подобную той, которая может быть использована в системе навигации через ретрансляцию псевдокода со сдвигом во времени для обеспечения срыва сопровождения по символам и частоте, как это было предложено выше, то нам необходимо осуществить следующие действия:
- Обнаружить сигнал связи противника в заданном диапазоне поиска в соответствующем угловом секторе.
- Определить его частоту и обеспечить подстройку с помощью ФАПЧ с целью выделения структуры самого сигнала.
- Определить длительность псевдокода, за счёт запоминания выборок сигнала связи противника, и определения периодичности за счёт получения пиков корреляционной функции при сдвиге одних выборок относительно других, как это делается для варианта достижения символьной синхронизации.
- Обеспечить излучение выбранного сегмента выборок исходя из времени между пиками корреляционной функции, со сдвигом во времени на предполагаемый символ или половину символа каждый интервал времени между пиками корреляционной функции, что обеспечит срыв сопровождения по коду и частоте.
То есть, предлагается способ выделения сигнала связи противника при использовании им вида модуляции и накопления сигнала по рисунку 8, но с учётом того, что в момент радиотехнической разведки (РТР) вид этого эталонного кодового сигнала и его несущая частота нам неизвестны. Сам же принцип основан на выделении корреляционной функции при использовании операции перемножения принимаемого сигнала с эталонным сигналом, с последующим накоплением результата в течение всей кодовой последовательности дающей бит информации. Так как наличие частоты Доплера из-за наличия периодической смены фазы влияет на результат корреляционной функции, то с помощью фазовой автоподстройки частоты (ФАПЧ) осуществляется подстройка под несущую частоту сигнала. Получение корреляционной функции происходит, например, в ПЛИС при сбросе сигнала на нулевую промежуточную частоту. Так как при РТР сигналов связи противника эталонный сигнал нам неизвестен, то с целью обеспечения операции сравнения с выделением корреляционной функции мы используем метод обнаружения, предложенный в [7, с. 26-53] по рисунку 13. При этом необходимо разбить одну АФАР БПЛА РЭБ на две подАФАР, что даёт снижение чувствительности в 2 раза из-за снижения коэффициента усиления антенн по отдельности.
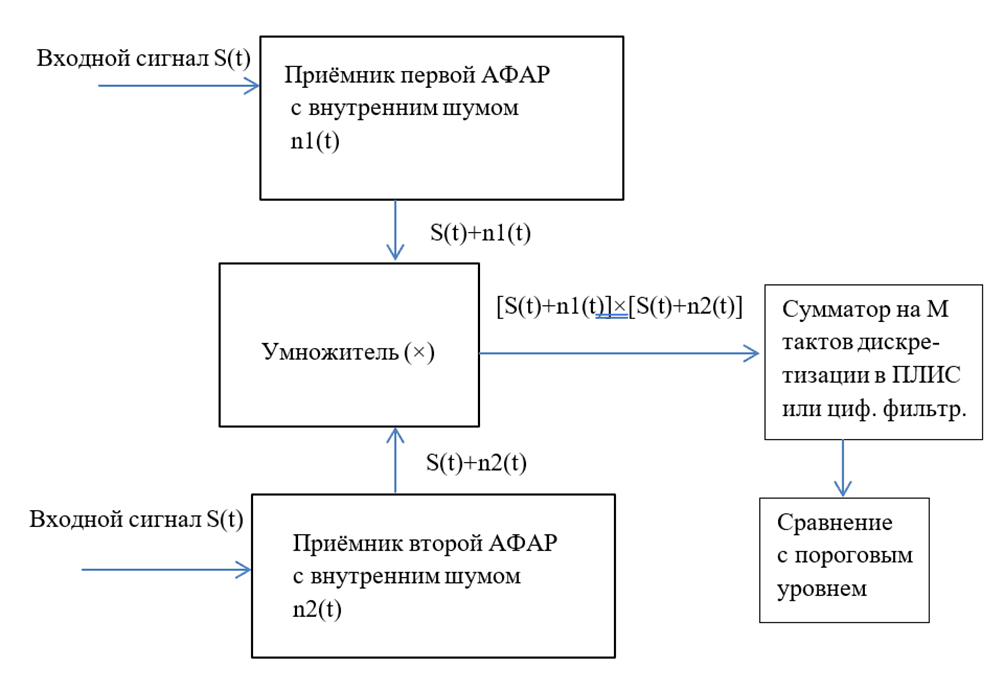
Рис. 13. Упрощённая функциональная схема выделения сигнала средствами РТР противника
Понятно, что в этом случае при сумме М тактов дискретизации будет накопление сигнала противника в виде (М×S(t))2. Все остальные сигналы не будут иметь накопление, так как нет корреляции (если бы иное для шумов было возможно, то вопрос об исключении шумов при приёме был бы решён простым вычитанием). Такой вариант обработки сигнала позволит выделить сигнал противника по частоте (информация в этом случае не сохраняется) за некоторый промежуток времени по превышению над пороговым уровнем. Однако, в этом случае обнаружение будет происходить для всех кодовых сигналов связи, попадающих в лучи двух подАФАР. Поэтому необходимо обеспечить фильтрацию с выделением по поддиапазонам несущей частоты. Кроме того, желательно определить вид модуляции накапливаемых по коду сигналов и длительность кода, для постановки помех, не отличающихся по виду от сигнала связи противника. С этой целью предлагается функциональная схема устройства определения наличия сигнала связи (УОНСС) по рисунку 14.
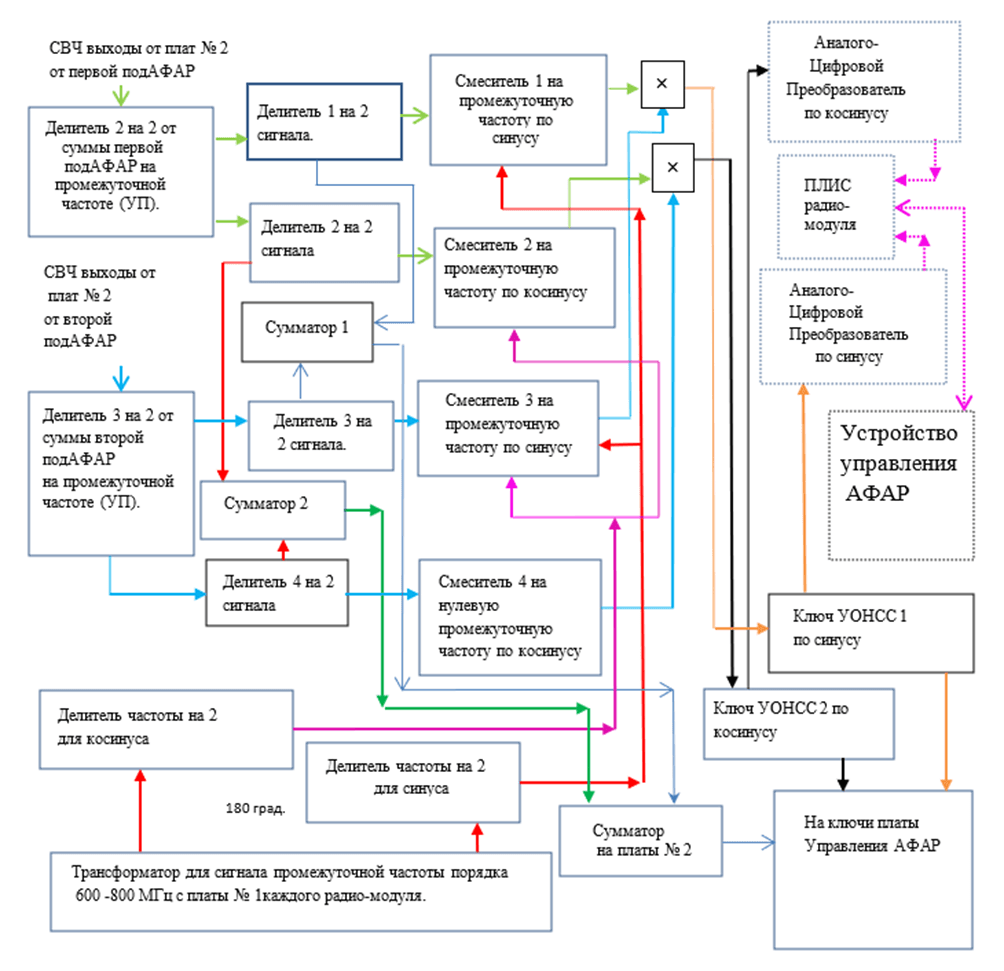
Рис. 14. Устройство определения наличия сигналов связи противника (УОНСС)
Это устройство определения наличия сигналов связи также находится на управляющей плате АФАР (рис. 10), что соответствует нижним сторонам плат № 1, объединённых в АФАР. При рассмотрении платы управления АФАР было предусмотрено деление общей АФАР на 2 подАФАР (рис. 10). С этой целью сигналы первой подАФАР через ключ 3 поступают на делитель 2 и далее на устройство определения наличия сигналов связи (УОНСС) и помех от противника. Соответственно сигналы второй подАФАР поступают через ключ 4 на делитель 3 и далее на устройство определения наличия сигналов связи, где происходит обработка сигнала по принципу, показанному на функциональной схеме по рисунку 14.
Здесь в момент обнаружения суммарные сигналы от двух подАФАР в УОНСС (рис. 14) через делители 1-4 поступают на смесители 1-4, дающие на выходе сигналы в квадратуре по синусу и косинусу на некоторой частоте. При этом мы не знаем несущей частоты сигнала противника, а только можем задать диапазон его поиска, что определяется общей гетеродинной частотой для двух подАФАР. После смещения сигналов на более низкую частоту происходит попарное перемножение сигналов от первого и второго подАФАР как по синусу, так и по косинусу с получением сигналов на двойной частоте. Далее эти сигналы с двойной частотой по синусу и косинусу поступают через соответствующие ключи УОНСС 1 и 2 (рис. 14) на ключ 17. Ключ 17 управляется устройством управления и определяет какой сигнал будет поступать на плату № 2 и далее через ключ 18 и ключ 2 (рис. 10) через усилитель и делитель на платы № 2 радио-модулей. Причём в данном случае выбран вариант, когда за счёт ключа 17 сигнал на двойной частоте по синусу поступает на платы № 2 первой подАФАР, а сигнал на двойной частоте по косинусу на платы № 2 второй подАФАР. На следующем этапе сигналы на двойной частоте по синусу и косинусу смещаются попарно за счёт восьми гетеродинных сигналов промежуточных частот для смесителей на платах № 2 на каждой подАФАР с разбиением диапазона поиска по частоте на 8 поддиапазонов. За счёт этого сигналы связи противника при модуляции QPSK из-за сдвига на 90 градусов разделяются и обрабатываются отдельно. С плат № 2 преобразованные сигналы по синусу и косинусу двойной частоты от УОНСС с разбиением по диапазону частот на 8 поддиапазонов поступают на платы № 1 на дифференциальные операционные усилители и далее через АЦП по синусу и косинусу на ПЛИС. Так как 8 промежуточных частот гетеродинных сигналов соответствующих радио-модулей от двух подАФАР имеют одинаковое равномерное смещение по частоте относительно друг друга, то мы можем осуществлять обнаружение сигналов противника с одинаковой фильтрацией в ПЛИС в 8-ми радио-модулях каждой из подАФАР на 8 разных частотах по синусу и косинусу в заданном поддиапазоне частот. После фильтрации в ПЛИС в радио-модулях в платах № 1 (рис. 9), сигналы по синусу и косинусу, преобразованные с двойных частот в заданный один из восьми поддиапазонов частот, поступают на соответствующий один из восьми ПЛИС 1, находящихся в устройстве управления АФАР (рис. 10). Здесь, после их суммирования и дополнительной фильтрации, фиксируется наличие сигнала связи по превышению над установленным порогом так, как это осуществляется для обычного сигнала информации. Так как основной фактор обнаружения сигнала связан с последовательным поиском по частоте, то вначале происходит грубый поиск по частоте с разбиением общего диапазона порядка 200 МГц на 8 поддиапазонов по 25 МГц. После обнаружения сигнала по частоте (информация здесь исключается за счёт перемножения сигналов), в одном из поддиапазонов, осуществляется разбиение этого выбранного поддиапазона ещё на 8 каналов по 3,125 МГц и так далее до попадания в необходимую полосу доплеровских частот приблизительно в 50 кГц. Понятно, что время поиска и обнаружения будет зависеть от времени фильтрации. В нашем случае на один шаг поиска при обнаружении до фильтрации в 50 кГц будет уходить 20 мкс, что при наличии 4-х шагов составит 80 мкс. Напомним, что по рисунку 8 предполагается скорость приёма информации устройством связи в 550 кбит/сек, а при полосе в 50 кГц у нас чувствительность в 10 раз выше. Понятно, что есть необходимость в том, чтобы БПЛА РЭБ находился достаточно близко от БПЛА противника, чтобы иметь возможность сократить время поиска с учётом того, что разница по чувствительности из-за использования кода при связи в некоторой степени компенсируется КНД АФАР РЭБ.
После попадания в необходимую полосу доплеровских частот в УОНСС используется режим обработки сигнала, при котором сигналы от радио-модулей после суммирования в УП АФАР (рис. 10) попадают через ключи 3 и 4 в УОНСС через делители 2 и 3 в управляющей плате АФАР (рис. 10). Здесь в УОНСС (рис. 14) также происходит разветвление каждого сигнала на два за счёт делителей 1-4 таким образом, что одна часть сигналов суммируется и поступает на ключи 19 и 18 платы УП АФАР с последующим поступлением на радио-модули платы №2 (рис. 9). Далее для этой суммарной части осуществляется уже выделение сигнала с запоминанием выборок за некоторый промежуток времени. Другая часть после делителей 1-4 поступает на смесители и далее происходит перемножение сигналов с выделением частоты Доплера без информации. После перемножения сигналы в квадратуре через ключи УОНСС поступают на соответствующие АЦП (рис. 14) и далее в ПЛИС, где по программе ФАПЧ осуществляется определение частоты Доплера и фазы. Эти значения передаются в устройство управления УП АФАР (рис. 10) или, например, в ПЛИС 1 УП АФАР, где после анализа определяются необходимые сигналы для выработки в ЦАП УП АФАР соответствующих сигналов по коррекции частоты. Такой способ обеспечивает возможность точной подстройки под частоту сигнала связи противника. В итоге, подстройка с использованием ФАПЧ, позволяет выделять символы кода по тактам дискретизации в радио-модулях (или одном выбранном радио-модуле). Используя запоминание выборок кода некоторой априорной длительности на основе сдвига по времени, можно выделить расстояние между пиками корреляционной функции кода и тем самым определить саму длительность кода. Далее ретранслируя излучение выделенного кода со смещением его во времени на символ кода через период длительности кода можно осуществить нарушение символьной и частотной синхронизации с гораздо меньшим энергетическим потенциалом и более скрытно, чем это происходит при обычной шумовой помехе. Более того, надо отметить, что выделение кода сигнала связи противника позволяет при наличии нескольких БПЛА РЭБ использовать суммарно-разностные методы определения его местоположения, аналогично тому, как это происходит в системах спутниковой навигации, так как в этом случае уже есть выборки эталонного сигнала для сравнения с приходящими сигналами связи или навигации. Здесь также анализируется время прихода сигналов кода связи на каждый БПЛА РЭБ с определением задержек. Понятно, что по аналогии требуется синхронизация часов БПЛА РЭБ, что осуществляется по сигналам от КПУ с учётом данных по навигации по местоположению самих БПЛА РЭБ. Возможно также наведение на цель БПЛА выполняющего функцию уничтожения по данным от БПЛА РЭБ. В этом случае, после обнаружения сигнала связи от БПЛА противника или его КПУ по превышению над уровнем порога обнаружения в одном из радио-модулей каждой подАФАР, может быть использован метод угловой пеленгации с помощью углового сканирования луча АФАР БПЛА РЭБ.
Таким образом, предлагаемая АФАР БПЛА РЭБ способна решать помимо функций связи, навигации, РЛС, также задачи радиотехнической разведки, постановки помех с наименьшими энергетическими затратами и определение местоположения средств противника по его сигналам.
После представления функциональных схем и описания принципов работы необходимо сделать оценку энергетических потерь на основе наиболее распространённой элементной базы и используемого в БПЛА диапазона несущих частот. Рассмотрим вариант энергетических потерь для наиболее используемого диапазона частот.
При приёме на начальном этапе сигнал принимается на 4 МШУ (плата № 1), и далее сигнал усиливается ещё одним МШУ (плата № 2). Нами выбран МШУ MAAL-007304 с питанием в 3 В и потреблением 10 млА, отсюда 5 МШУ дадут потребляемую мощность 5×0,03 Вт=0,15 Вт. Далее используется смеситель IAM-91563 с питанием в 3 В и токе 9 млА с мощностью потребления 0,027 Вт. На второй вход смесителя поступает сигнал от усилителя MAALSS0012 с питанием 3 В и током 79 млА, это составит потребление по мощности в 0,237 Вт. На усилитель MAALSS0012 гетеродинный сигнал поступает от балансного модулятора AD8346 с питанием 3 В с током в 45 млА, отсюда мощность потребления 0,135 Вт. После смесителя стоит усилитель μPC2746TB-E3 с питанием в 3 В и током в 7,5 млА, с потреблением 0,0225 Вт и фильтр с исключением сигналов гармоник, гетеродинной и несущей частоты. Далее после фильтра используется логарифмический усилитель AD8309 с питанием 3 В, при токе 16 млА и мощностью потребления 0,048 Вт. Для усиления сигнала от синтезатора частот на балансный модулятор здесь надо добавить ещё один усилитель MAALSS0012 с потреблением в 0,237 Вт.
Если предположить работу приёмника в режиме АФАР, то на 16 плат № 2 без учёта 4-х МШУ на плате № 1 придётся потребляемая мощность в 16×(0,03 Вт+0,027 Вт+2×0,237 Вт+0,135 Вт+0,0225 Вт+0,048 Вт)=11,784 Вт. С учётом 4-х МШУ на плате №1 16×0,12 Вт+11,784 Вт= 13,704 Вт. С включением в энергетический расчёт платы управления, которая эквивалентна плате № 1, и, как это будет видно дальше, имеет потребление в 2,675 Вт, будем иметь общую мощность потребления при приёме в 16,379 Вт.
При работе в индивидуальном режиме предлагаемого радио-модуля с логарифмического усилителя сигнал поступает на преобразование на нулевую промежуточную частоту в двух смесителях AD831 c питанием ±5 В и током 100 млА, что даёт потребление в 0,5 Вт на смеситель. На вторые входы смесителей AD831 поступают сигналы в квадратуре от делителей на 2 HMC432 с питанием 3 В и потреблением тока 42 млА, что требует мощность в 0,126 Вт. Перед делителями на 2 стоит усилитель μPC2746TB-E3 с питанием в 3 В и токе 7,5 млА, и потреблением 0,0225 Вт. В итоге при отдельной работе радио-модуля по плате № 2 в режиме приёма (не в режиме дуплекса с передачей на низкой частоте) общая мощность потребления составит 0,7365 Вт+2×0,5 Вт+2×0,126 Вт+0,0225 Вт =2,011 Вт. С учётом 4-х МШУ на плате №1 имеем потребление в 2,131 Вт. Мы видим, что основной вклад дают смесители AD831, но в будущем их можно заменить на демодулятор AD8348 с питанием в 3 В и потреблением 48 млА (мощность потребления 0,144 Вт), и тогда общее потребление по плате № 2 (с учётом четырёх МШУ от платы № 1) при приёме составит 0,12 Вт+ 0,7365 Вт+0,144 Вт+0,0225 Вт =1,023 Вт.
Теперь рассмотрим энергетические потери по плате № 1 в режиме приёма без учёта 4-х МШУ, которые мы учли ранее.
Здесь сигналы от смесителей AD831 поступают на дифференциальные операционные усилители AD8138AR с питанием в 3 В и током 20 млА, что даёт потребление мощности в 0,06 Вт. Сигналы с дифференциальных операционных усилителей поступают на АЦП AD9254 с потреблением в 0,43 Вт при тактовой частоте 150 Мбит/сек. Далее мы используем ПЛИС A3PE3000L и его потребление определяется алгоритмом работы внутри ПЛИС, и связано с начальной тактовой частотой в 150 МГц начальной обработки входных данных в 14 бит по амплитуде. Так как после первичного запоминания выборок в ПЛИС мы используем обработку с тактом 38 Мгц, то основное потребление будет в самом начале обработки, что связано со временем переключения, которое определяет расход энергии, и фактически равно потреблению двух АЦП в 0.43 Вт. С учётом остальных переключений принимаем потребляемую мощность ПЛИС A3PE3000L в 1 Вт. С выхода ПЛИС используется ЦАП AD9763 для ФАПЧ и формирования сигнала информации в режиме передачи с потреблением 0,38 Вт. В качестве синтезатора частоты для несущей и гетеродинных частот используется ADF4350 с питанием 3,3 В и током в 70 млА, мощность потребления составляет 0,231 Вт. Для создания частоты в 600 МГц используется делитель HMC426MS8 с питанием 3 В и потреблением 13 млА, что составит потребление по мощности в 0,039 Вт. Для синтезатора частоты и ПЛИС используется кварцевый генератор VTD3 с питанием 3 В и током в 15 млА с мощностью потребления в 0,045 Вт. Таким образом потребляемая мощность платы № 1 в режиме приёма составит 2×0,06 Вт+2×0,43 Вт+1 Вт+0,38 Вт+0,231 Вт+0,039 Вт+0,045 Вт=2,675 Вт. С учётом 4-х МШУ имеем потребление 2,795 Вт.
Таким образом, радио-модуль в режиме приёма, потребляет мощность для платы № 1 и № 2 при использовании радио элементной базы 10–15-летней давности 2,011 Вт +2,795 Вт= 4,806 Вт. С демодулятором AD8348, который позволяет сократить энергетические потери за счёт объединения функций в одной микросхеме, мы будем иметь потребление 0,903 Вт+2,795=3,698 Вт. Это сопоставимо с мощностью потребления навигационного приёмника «Каскад»-4М с потреблением 6 Вт в лучшую сторону. В режиме АФАР с 16 радио-модулями и 1 управляющей платой (плата № 1) при приёме мы после логарифмических усилителей имели потребление на плате № 2 с учётом 4-х МШУ на плате № 1 в 16,379 Вт. Для учёта смещения на нулевую промежуточную частоту с наличием использования смесителей AD831 и делителей на два 2-х плат № 2 мы должны учесть энергетическое потребление 2×1,2745 Вт =2,549 Вт и использование 2-х плат № 1 без учёта ЦАП с потреблением в 0,38 Вт дополнительно. В итоге мы будем иметь потребление 16,379 Вт+2,549 Вт +2×(2,675-0,38)=23,518 Вт. При использовании AD8348 16,379 Вт+2×0,1665 Вт +2×(2,675-0,38)=21,302 Вт. Надо отметить, что рассматриваются непрерывные режимы приёма по платам. В режиме скважности, например, Q=2 потери сократятся вдвое. В режиме РЛС приём может происходить со скважностью в 10 и более раз, что соответственно сократит энергетические потери при приёме.
Теперь определим потребляемую мощность по плате № 2 при передаче. Здесь используются 4 УМ SZA-2044 при питании 3,3 В и током в 175 млА с выходной мощностью 25 дБм (0,32 Вт). В результате потребление SZA-2044 составит 0,5775 Вт при питании 3,3 В. Для сравнения, радио-модуль БПЛА на малых дальностях в диапазоне частот от 3,4 ГГц до 3,6 ГГц в устройстве с управлением Е2Е4 KHUKRI STEALTH (Рис.8) имеет мощность в 0,3 Вт, и это явно недостаточно для постановки помех и режима РЛС.
Мощности SZA-2044 в 0,32 Вт достаточно при передаче при индивидуальном режиме связи, но может также не хватить для режима РЛС. Однако при питании в 5 В с током в 340 млА (мощность потребления 1,7 Вт) УМ SZA-2044 может выдать мощность сигнала в 29,5 дБм (это практически 1 Вт). Для предварительного усиления используются три усилителя MAALSS0012 с потреблением в 0,237 Вт, далее используется балансный модулятор AD8346 с мощностью потребления 0,135 Вт и усилитель MAALSS0012, который подаёт сигнал на балансный модулятор. Отсюда в режиме передачи плата № 2 потребляет 4×0,5775 Вт+4×0,237 Вт+0,135 Вт=2,31 Вт+0,948 Вт+0,135 Вт=3,393 Вт. При питании в 5 В при передаче мы имеем 4×1,7 Вт+4×0,237 Вт+0,135 Вт=2,31 Вт+0,948 Вт+0,135 Вт=7,883 Вт. Плата № 1 в режиме передачи потребляет в основном за счёт ЦАП (ПЛИС работает в режиме передачи информации в 38 Мбит/сек), синтезатора частоты и кварцевого генератора. Отсюда имеем 0,38 Вт+0,231 Вт+0,045 Вт=0,656 Вт. Следовательно, потребление радио-модуля по платам № 1 и № 2 в режиме передачи составит 3,393 Вт+0,656 Вт=4,049 Вт при питании в 3,3 В, и 7,883 Вт+0,656 Вт=8,539 Вт при питании в 5 в.
Таким образом, радио-модуль в автономном режиме приёма (при демодуляторе AD8348) будет иметь потребление 1,023 Вт+2,675 Вт=3,698 Вт, а в режиме передачи 4,049 Вт при питании в 3,3 В.
Иными словами потребление радио-модуля составит 4 Вт при отдельном его использовании в непрерывном режиме.
Это без режима дуплекса, когда есть одновременный приём на одной частоте и передача на другой частоте, и наоборот. В первом режиме дуплекса при приёме информации на высокой несущей частоте порядка 2,4 ГГц и передаче информации на частоте порядка 600 МГц на дополнительную антенну (разнос антенн при постановке помех необходим в случае работы в режиме ретрансляции) этого диапазона у нас добавляется использование на плате № 2 балансного модулятора AD8345ARU с питанием в 3 В и током в 65 млА (в режиме standby ток 70 мкА), что даёт потребление в 0,195 Вт. На управляющие входы AD8345ARU поступают сигналы от двух операционных усилителей AD8132 с питанием в 5 В и током в 10,7 млА, при мощности потребления в 0,0535 Вт. Далее сигнал поступает на усилитель μPC2746TB-E3 с питанием в 3 В и токе 7,5 млА, и потреблением 0,0225 Вт. На следующем этапе сигнал усиливается в двух усилителях MAALSS0012 с потреблением в 0,237 Вт, прежде чем он поступает на дополнительную антенну. Итого, в режиме дуплекса при приёме на высокой частоте и передаче на низкой частоте добавляется потребление в 0,7985 Вт. Соответственно при AD831 в режиме дуплекса с учётом платы № 1 и № 2 мы имеем потребление 4,806 Вт+ 0,7985 Вт=5,6045 Вт, а при демодуляторе AD8348 мы получаем потребление в первом режиме дуплекса в 3,698 Вт+0,7 985 Вт=4,4965 Вт.
Во втором режиме дуплекса передаётся информация на высокой несущей частоте и идёт приём на низкой частоте. Здесь, мы имеем использование на плате № 2 практически всех радиоэлементов с учётом балансного модулятора AD8345ARU (мощность потребления в 0,195 Вт), двух усилителей AD8132 (мощность потребления одного в 0,0535 Вт), усилителя μPC2746TB-E3 (потребление 0,0225 Вт), делителя на два HMC432 (требует мощность в 0,126 Вт). Дополнительное потребление энергии составит 0,428 Вт. Одновременно во втором режиме дуплекса на плате № 2 используется передача на высокой частоте с потреблением 3,393 Вт. В итоге потребление по плате№ 2 составит величину 3,821 Вт. Плата № 1 в этом случае задействована полностью без учёта 4-х МШУ с потреблением в 2,675 Вт. Кроме того, необходимо учесть работу смесителей AD831 с делителями на два и усилителем, что составляет 1,2745 Вт. При AD8348 будем иметь величину в 0,1665 Вт. В результате платы № 1 и № 2 во втором режиме дуплекса при AD831 будут потреблять 3,393+1,2745+0,428+2,675=7,7705 Вт. При AD8348 потребление составит 3,393+0,1665+0,428+2,675=6,6625 Вт.
Ниже приводится таблица, где учитывается только непрерывный режим потребления без специализации по реальному режиму работы.
Таблица
Потребление мощности в различных режимах работы
|
Режимы работы |
Потребление мощности Плата №1 |
Потребление Мощности Плата №2 |
Упр. плата |
Общее потребление |
|---|---|---|---|---|
|
Приём в непрер. режиме АФАР. |
16×0,12 Вт |
16×0,7365+2,549 +4,59 =18,918 Вт |
2,675 Вт |
23,513 Вт |
|
Приём в непрер. режиме АФАР с AD8348. |
16×0,12 Вт |
16×0,7365+0,333 +4,59 =16,707 Вт |
2,675 Вт |
21,302 Вт |
|
Передача в непрер. режиме АФАР при 3,3 В питания. |
|
16×3,156 Вт |
0,656 Вт |
51,152 Вт |
|
Передача в непрер. режиме АФАР при 5 В питания. |
|
16× 7,883 Вт. |
0,656 Вт |
126,784 Вт |
|
Непрерывный режим приёма одним радио-модулем. |
2,795 Вт |
2,011 Вт |
|
4,806 Вт |
|
Непрерывный режим приёма одним радио-модулем с демодулятором AD8348. |
2,795 Вт |
0,903 Вт |
|
3,698 Вт |
|
Непрерывный режим передачи одним радио-модулем при питании в 3 В. |
0,656 Вт |
3,393 Вт |
|
4,049 Вт |
|
Непрерывный режим передачи одним радио-модулем при питании в 5 В. |
0,656 Вт |
7,883 Вт. |
|
8,539 Вт |
|
Первый режим дуплекса для радио-модуля при AD831. |
2,795 Вт |
2,011 Вт+0,7985 Вт=2,8095 Вт |
|
5,6045 Вт |
|
Первый режим дуплекса для радио-модуля (непрерывный) при AD8348. |
2,795 Вт |
0,903 Вт+0,7985 Вт=1,7015 Вт |
|
4,4965 Вт |
|
Второй режим дуплекса для радио-модуля (непрерывный) при AD831. |
2,675 Вт |
3,393+0,428+1,2745 =5,0955 Вт |
|
7,7705 Вт |
|
Второй режим дуплекса при AD8348. |
2,675 Вт |
3,393+0,428+0,1665 =3,9875 Вт |
|
6,6625 |
Для сравнения навигационный приёмник «Каскад-4М», имеет потребление в 6 Вт и работает только на приём, при размерах 13 см × 13 см. В случае предлагаемого отладочного радио-модуля размерами 14 см × 7 см, который имеет приём и передачу в режиме дуплекса, энергетические потери по таблице № 1 составляют в первом режиме дуплекса при смесителях AD831 величину 5,6045 Вт, и величину 7,7705 Вт во втором режиме дуплекса. При скважности смены режимов работы равного двойке, среднее потребление составит 6,6875 Вт. При использовании для смещения на нулевую промежуточную частоту микросхемы AD8348 получим в первом режиме дуплекса 4,4965 Вт, и 6,6625 Вт во втором режиме. В среднем при микросхеме AD8348 в режимах дуплекса мы будем иметь потребление в 5,5795 Вт, что соответствует потреблению «Каскад-4М» в 6 Вт.
Так как за основу были выбраны отладочные платы № 1 и № 2 с исполнением в виде двусторонней печатной платы с исключением наводок, то при использовании многослойной печатной платы размеры плат могут быть сокращены тоже с исключением наводок, но при размещении проводников на соответствующем слое многослойной печатной платы. Ориентировочно размеры можно довести до 13 см×6,5 см, а это означает, что при том же энергопотреблении в 6 Вт как в «Каскад-4М» и при подключении к антенне патч аналогичной в «Каскад-4М», предлагаемый радио-модуль может использоваться и для спутниковой навигации. При этом, предлагаемый радио-модуль можем работать не только как навигационный приёмник, но и обеспечивает многофункциональное применение.
Как мы видим, наибольшее потребление происходит в режиме АФАР, но при учёте выполняемых функций эта мощность может быть значительно снижена за счёт скважности при Q=10 в 10 раз.
В режиме АФАР при питании УМ в 3 вольта, когда основу передачи составляют 16 плат № 2, а плата № 1 фактически играет роль управляющей платы, мы имеем потребление мощности 16×3,156 Вт+0,656 Вт=51,152 Вт в режиме непрерывной передачи. При этом мощность сигнала помехи от АФАР будет равняться 16×4×0,32=20,48 Вт при питании УМ 3,3 В и током в 175 млА. Использование скважности Q=10 позволяет сократить энергетические потери до приемлемых 5 Вт при питании 3,3 В. Для варианта питания в 5 В мы будем иметь потребление в 127 Вт, и при скважности Q=10 потребление составит 13 Вт. Понятно, что режим подавления навигационного приёмника БПЛА противника играет основную роль в случае невозможности его уничтожения при определении его местоположения. Действительно, средства поражения БПЛА не расставишь через каждый километр, а уничтожать его другим БПЛА может быть дорого. В этом случае один БПЛА РЭБ с АФАР может привести к дезориентации по местоположению сразу несколько БПЛА противника с учётом режима ретрансляции кодов навигации или сигнала командной радиолинии при расположении БПЛА РЭБ, например, между КПУ и БПЛА. При этом обнаружить сигнал такой ретрансляционной помехи достаточно сложно в силу идентичности сигналов. Кроме того, определение местоположения БПЛА противника позволяет обеспечивать подлёт для подавления на достаточно короткие расстояния, что и обеспечит эффективность помехового воздействия за счёт ретрансляционных ответных помех, как системам навигации, так и системам связи.
Таким образом, в АФАР БПЛА на предлагаемых радио-модулях нет лишних радиодеталей при многофункциональном использовании, и он оптимизирован по всем параметрам. Надо отметить, что сам выбранный в предлагаемых радио-модулях подход перехода на патч-антенны с целью обеспечения помехозащищённости был сделан для навигационных приёмников типа «Каскад-4М», хотя здесь для обеспечения точной навигации требуется как можно более широкий сектор обзора, но этим пожертвовали в угоду помехозащищённости. Кроме того, наш выбор размера под два-патч связан с размерами смартфонов и при этом соблюдается создание различных видов поляризации, что также улучшает помехозащищённость. Ранее в [7, с, 26-53; 8, с. 23-51] мы отмечали, что АФАР в диапазоне 250 МГц – 4 ГГц могут отличаться только выбором элементной базы и конструкцией патч-антенн при сохранении предлагаемых функциональных схем. Для диапазона 4–6 ГГц требуются уже специализированные функциональные схемы в силу малых размеров патч-антенн с сохранением общего принципа действия. Отметим, что с целью защиты самих абонентов от поражения за счёт наведения на источник сигнала предусмотрен режим дуплекса на разных частотах. Это позволяет абоненту не находиться рядом с источником излучения сигнала на БПЛА и работать в режиме Wi-Fi за счёт дуплексной связи. Такой режим необходим и с целью ретрансляции ответных помех с разнесением приёма сигналов связи противника на один БПЛА и их излучением с помощью другого БПЛА. Программное обеспечение ПЛИС АФАР БПЛА позволяет формировать сигналы связи любых типов по рисунку 8. Модульная конструкция сборки АФАР БПЛА позволяет расширить функции и использовать устройства не только как средство связи и управления, но и в качестве средств навигации, РЛС, РТР и постановки помех. Понятно, что предлагаемый радио-модуль не был создан ранее в силу того, что разработчики увлеклись созданием отдельных устройств (например, приёмопередатчик на микросхеме AD9361), и не пытались решить проблему с учётом оптимизации функциональных схем при многофункциональном применении. При создании не учитывалась проблема оптимизации электрических схем совместно с топологией расположения элементов патч-антенны, радиоэлементов, а также не разрабатывалось программное обеспечение с оптимизацией параметров при многофункциональном применении. Разработчики увлеклись использованием и закупкой уже готовых вариантов из-за рубежа на основе коммерческого использования, а так как зарубежные разработчики занимались коммерческими вариантами для частных задач, то здесь не требовалось многофункциональное применение с удешевлением за счёт унификации, которое необходимо в условиях военного использования.
