В статье «Создание и исследование статических показаний гибкого тензометрического датчика на основе токопроводящих порошков» было выяснено, что математическая модель, представленная в статье «Математическая модель для гибких тензодатчиков на основе токопроводящих порошков», является несостоятельной. Для использования гибких тензометрических датчиков необходимо найти зависимость удлинения ![]() от сопротивления R, для этого нужно проанализировать динамические показания датчика.
от сопротивления R, для этого нужно проанализировать динамические показания датчика.
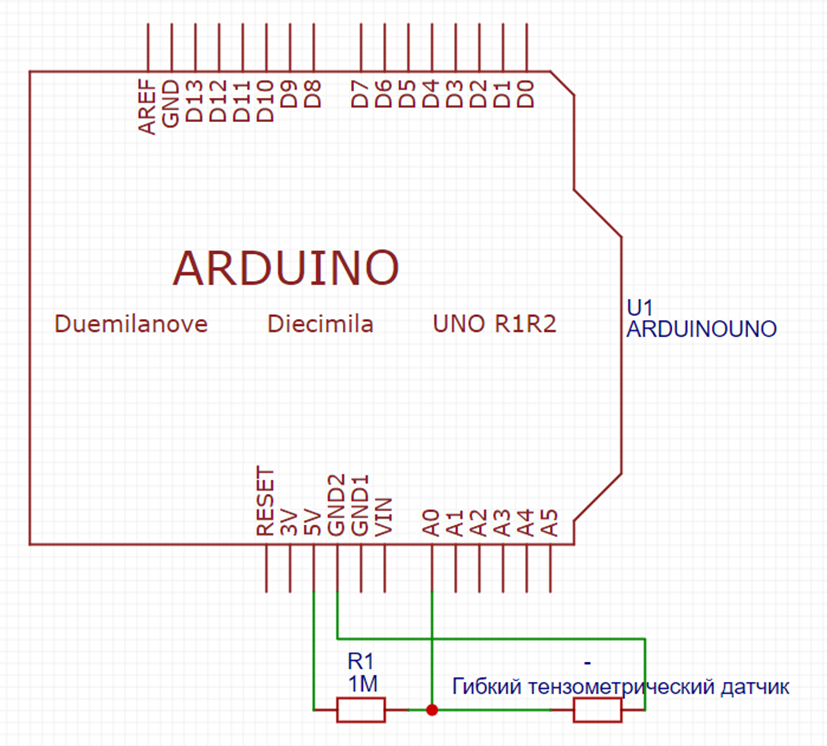
Рис. 1. Схема для исследования динамических показаний гибкого тензометрического датчика
Для исследования динамических показаний гибкого тензометрического датчика была составлена схема представленная на рисунке 1, состоящая из платы ArduinoUNO и делителя напряжения. Также необходимо было выбрать фильтр, для устранения шумов. Было принято решение взять фильтр скользящее среднее, так как он позволяет сгладить шумы и выбросы, позволяет выявлять общие тенденции и тренды, уменьшая влияния случайных колебаний.
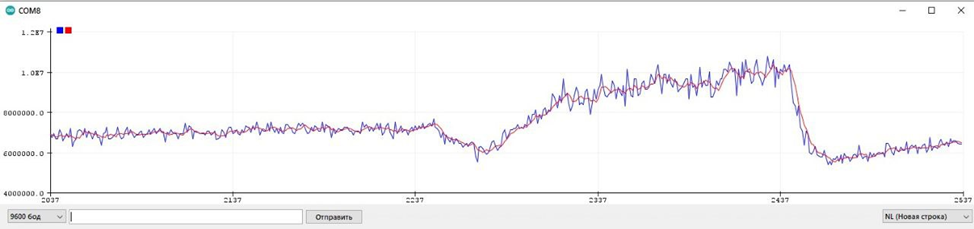
Рис. 2. График зависимости сопротивления R от времени t при разных показаниях удлинения ![]() (синий – не фильтрованный значения; красный – фильтрованные значения)
(синий – не фильтрованный значения; красный – фильтрованные значения)
При детальном анализе полученной зависимости, представленной на рисунке 2, было замечено, что во время удлинения гибкого тензометрического датчика сопротивление R резко увеличивается и экспоненциально уменьшается. Из-за этого была выдвинута теория, что гибкий тензометрический датчик имеет активно-ёмкостный характер. Для подтверждения теории была собрана цепь, представленная на рисунке 3. Цепь состоит из генератора меандра, резистора R = 330Ом, гибкого тензометрического датчика и осциллографа.
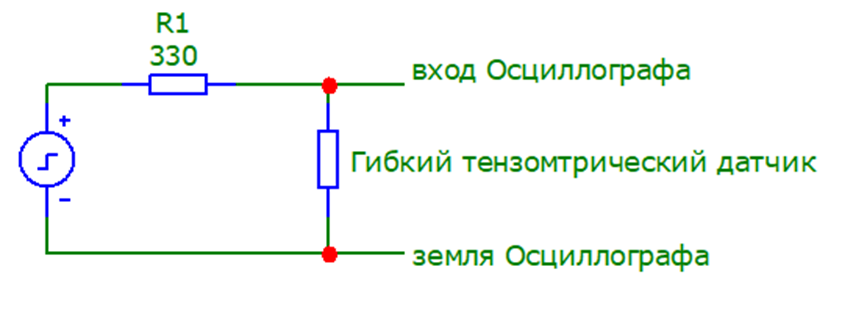
Рис. 3. Принципиальная схема цепи для проверки теории
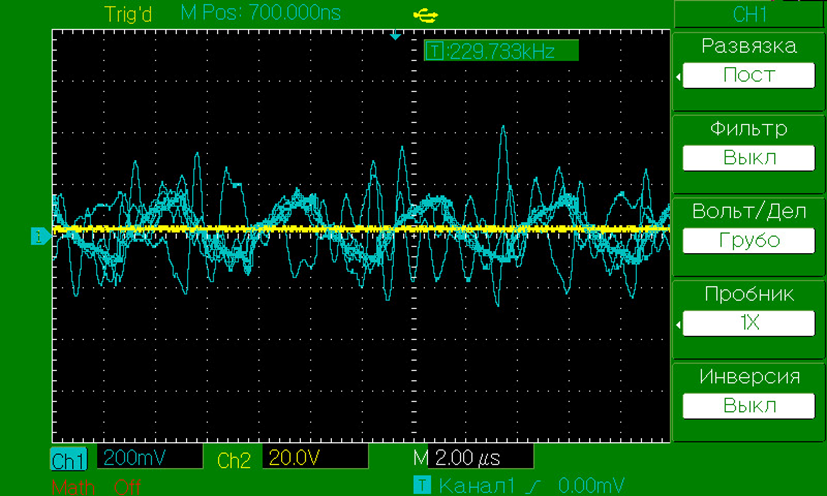
Осциллограмма, представленная на рисунке 4, представляет собой зашумлённый сигнал RC цепи. Следовательно, гибкий тензометрический датчик имеет активно-емкостный характер.
Рис. 4. Осциллограмма цепи для проверки теории