
Для 3D-визуализации движения квадрокоптера предлагается использовать пакет UAV Toolbox в Matlab Simulink и движок Unreal Engine.
UAV Toolbox – это инструмент для моделирования, симуляции и тестирования беспилотных летательных аппаратов (БПЛА). С помощью этого продукта инженеры и исследователи могут создавать и оптимизировать системы управления и навигации беспилотников за счет наличия широкого набора функций, основанных на передовых технологиях и алгоритмах, что сокращает время разработки проектов и повышает надежность эффективность систем БПЛА [1].
Unreal Engine – это передовая игровая платформа, разработанная компанией Epic Games, которая используется для создания высококачественных трехмерных игр и симуляций. Эта платформа обладает мощными возможностями для рендеринга, физического моделирования, анимации и взаимодействия, что делает ее идеальной для широкого спектра приложений, включая виртуальную реальность (VR) и дополненную реальность (AR).
Общая структура модели движения квадрокоптера с 3D визуализацией в Matlab Simulink с использованием UAV Toolbox имеет следующий вид (рис. 1):
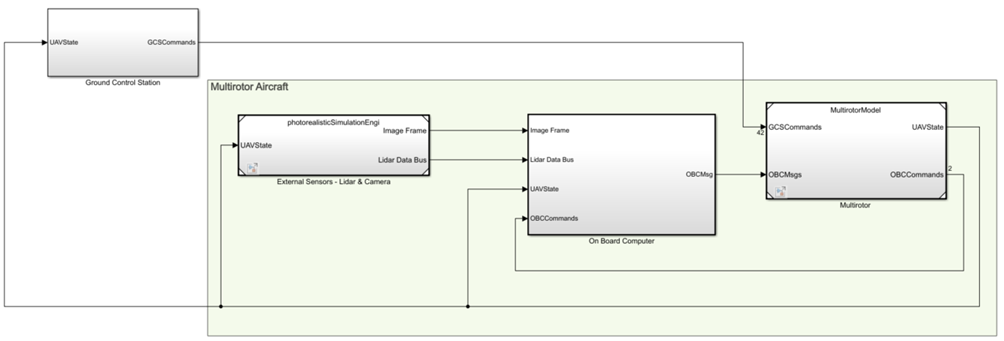
Рис. 1. Общая структура модели движения квадрокоптера с 3D визуализацией
Основные функциональные блоки:
1. Ground Station Control – предназначен для задания траектории движения квадрокоптера (рис. 2).
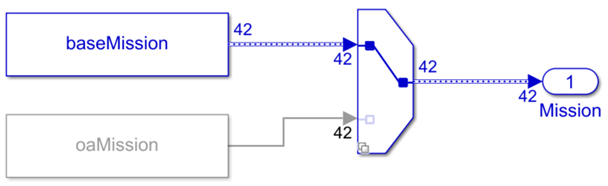
Рис. 2. Выбор траектории движения
2. External Sensors – Lidar & Camera (рис. 3) – предназначен для размещения внешних датчиков и приборов, используемых для получения информации о внешнем мире, таких как камера и лидар, а также для вывода изображения с камеры на монитор.
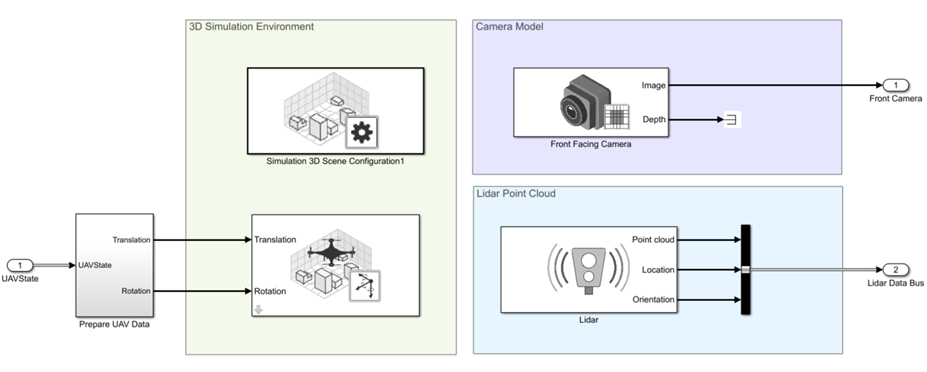
Рис. 3. Датчики квадрокоптера
3. On Board Computer (рис. 4) – предназначен для выполнения роли центрального вычислительного устройства квадрокоптера. С его помощью происходит обработка информации с датчиков, управление работой системы и контроль выполнения задачи БПЛА [2].
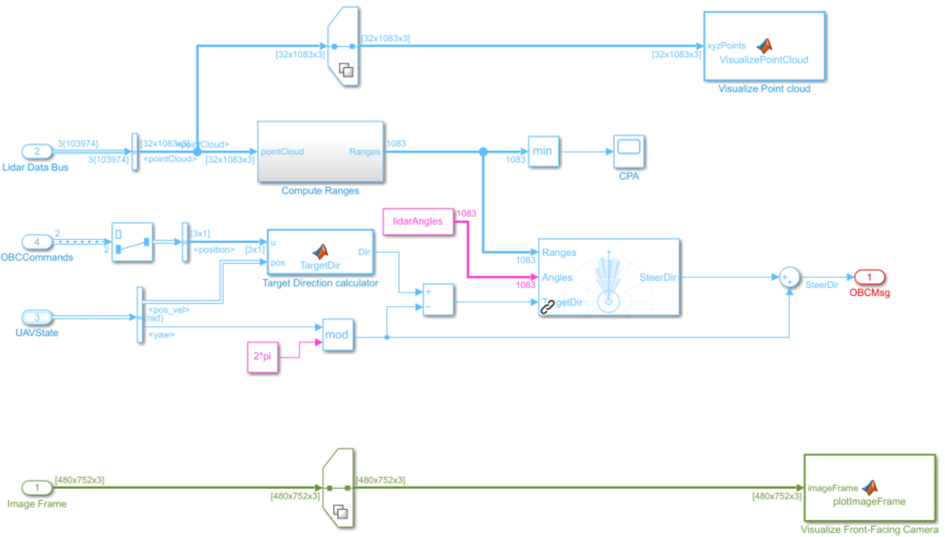
Рис. 4. Блок On Board Computer
4. Multirotor – выполняет роль модели мультироторного БПЛА. Он включает в себя математическую модель квадрокоптера, описывающую движение БПЛА в трехмерном пространстве.
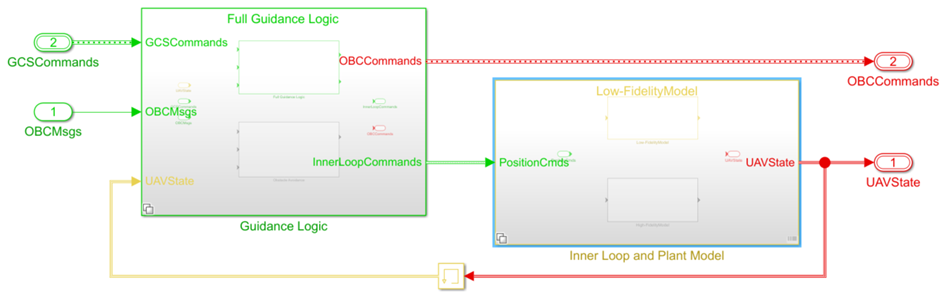
Рис. 5. Блок Multirotor
Результаты выполнения программы представлены на рисунках 6 и 7.
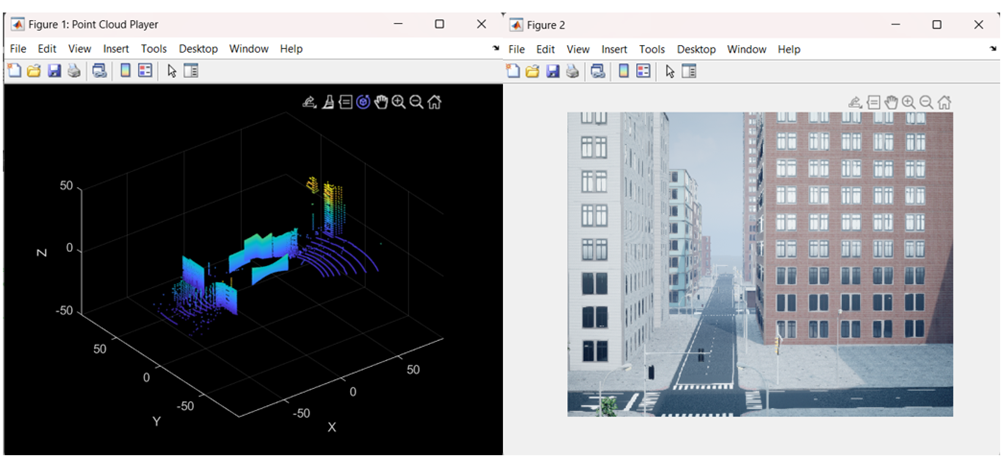
Рис. 6. Данные с лидара и изображение с камеры

Рис. 7. 3D визуализация движения квадрокоптера
В результате выполнения программы были получены наглядное отображения данных с лидара, внешней камеры и общая 3D визуализация движения квадрокоптера.
Заключение
Пакет UAV Toolbox позволяет проводить моделирование и симуляцию полета квадрокоптера, что в свою очередь помогает при разработке системы управления. Так же это позволяет наглядно увидеть работу системы, что дает возможность быстрее выявить недостатки системы и устранить их.
