
Введение. В связи с ростом объемов автомобильных грузоперевозок и увеличением требований к безопасности дорожного движения, которые нормируются как локальными Правилами Дорожного Движения, так и соглашением ЕСТР (работа экипажей транспортных средств, производящих международные автомобильные перевозки).
Для минимизации таких материальных издержек эксплуатации транспортных средств, как расход топлива (затраты на него составляют около 40% всех затрат в грузоперевозках), износ тормозных систем и автошин предприятия стимулируют водителей разными методами, однако для эффективного анализа этих мер и результата их использования необходим комплексный подход в оценке качества работы водителя.
Для решения этих задач был разработан алгоритм анализа телеметрических данных работы водителя и транспортного средства, получаемых от автомобиля во время его работы.
Постановка задачи. Целью данного проекта является разработка алгоритма, который позволит:
- Производить фильтрацию и анализ собранных оперативных данных и выделять отдельные события, такие как стоянка, движение, маневрирование и пр.
- Производить анализ полученных событий и данных о дорожной обстановке для оценки работы водителя во время движения.
- Производить анализ собранных оперативных данных для выявления нарушений режима труда и отдыха для повышения безопасности работы.
- Производить анализ оперативных данных для определения “стиля” вождения каждого водителя и выдачи рекомендаций по улучшению этого стиля в целях улучшения безопасности и экономии материальных ресурсов предприятия-перевозчика.
Исходные данные. Для работы алгоритма используются телеметрические данные, собранные программно-аппаратными системами, которые:
- Собирают техническую информацию об автомобиле, его узлах и расходных материалах (Топливо, жидкость AdBlue) и информацию по передвижению автомобиля по автодорогам (GPS/ГЛОНАСС);
- Передают собранную информацию по беспроводным каналам связи на телематический сервер для последующего хранения, обработки и анализа.
Для данной разработки использовано устройство FM4200 компании Teltonika [1]. Оно располагается внутри автомобиля и имеет следующие возможности:
- Определение координат автомобиля при помощи системы GPS [2] (для повышения точности и помехозащищенности используется внешняя выносная GPS-антенна);
- Сбор информации от дополнительных аналоговых датчиков, установленных в автомобиле, например датчиков уровня топлива в баках;
- Сбор информации от дополнительных импульсных счетчиков, используемых для получения информации об объеме топлива на входе в топливную систему из бака и на выходе из топливной системы в бак (так называемая «обратка»). Расчетная разница показывает количество топлива, поступившего непосредственно в двигатель;
- Сбор информации от встроенного в устройство акселерометра. Используется для измерения ускорения и наличия движения. Долгое нахождение устройства без движения используется для отключения части функционала, например, более редкую передачу данных на телематический сервер или активацию и деактивацию режима сна устройства. Также используется для оценки резкого маневрирования на дороге и езде по неровной дороге (или проезд искусственных неровностей) на большой скорости.
- Сбор информации от внешнего датчика вибрации. Используется для определения величин допустимой вибрации и косвенного определения качества дорожного покрытия и наличия искусственных неровностей.
- Датчик нагрузки на ось. Используется для косвенного определения веса транспортного средства и предотвращения превышения допустимых по ПДД значений;
- Передача полученной информации посредством GPRS-трафика на телематический сервер посредством использования четырех преднастроенных профилей для разных регионов нахождения объекта.
Однако при подключении устройств к грузовым автомобилям приходится сталкиваться со следующими проблемами. На большинстве дальнемагистральных грузовых автомобилей используются два топливных бака. Однако штатный датчик уровня присутствует только на одном, основном баке. Топливо из второго, дополнительного бака поступает в первый либо через трубку, как в сообщающихся сосудах (DAF), либо перекачивается низкопроизводительным электрическим насосом в автоматическом режиме (Mercedes). Поэтому показания единственного штатного датчика уровня топлива при наличии двух баков не позволяет корректно показывать реальный остаток топлива в автомобиле. Для решения этой проблемы используются дополнительные датчики, монтируемые в каждый топливный бак и работающие независимо.
Исходные данные: Исходными данными системы являются промежуточные (наблюдаемые) параметры состояния и работы ТС. После предварительной обработки система имеет окончательные (обработанные) параметры, по которым происходит дальнейший анализ работы ТС (рисунок 1).
Некоторые параметры имеют заданные предельные значения (например, максимальные и минимальные обороты двигателя).
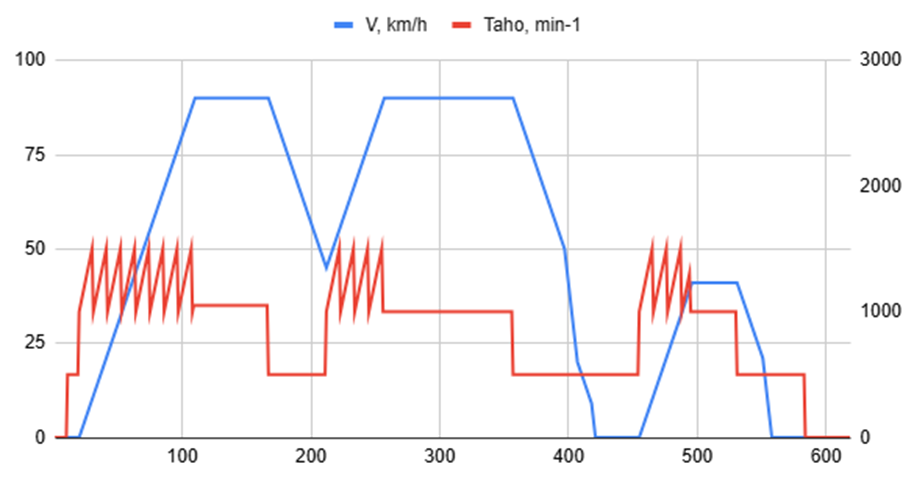
Рис. 1. График входных параметров: “Линейная скорость движения” и “Обороты двигателя”
Предварительный анализ данных. Доступ к данным и их обработка осуществляется в соответствии с разработанным алгоритмом. На первом этапе производится предварительная обработка собранных данных (профайлинг) с датчиков с целью оценки их качества, и при необходимости применения к ним средств фильтрации данных: заполнение пропусков, подавление аномальных значений, исключение дубликатов и противоречий. Для устранения погрешности измерений, которые представляют собой «шум» в данных, производится анализ и устранение заведомо некачественных данных (выход значений за допустимые пределы, пропуски в данных, резкие нереальные изменения некоторых параметров, например, из-за «дребезга» контактов механических датчиков).
Работа с наблюдаемыми и расчетными параметрами. Некоторые параметры предварительно обрабатываются для получения расчетных параметров на основании вариаций вектора изменения наблюдаемых параметров (рисунок 2). Например, скорость движения, показания акселерометра позволяют вычислить прямое и поперечное ускорения, а обороты двигателя и скорость ТС позволяет вычислить нагрузку на двигатель.
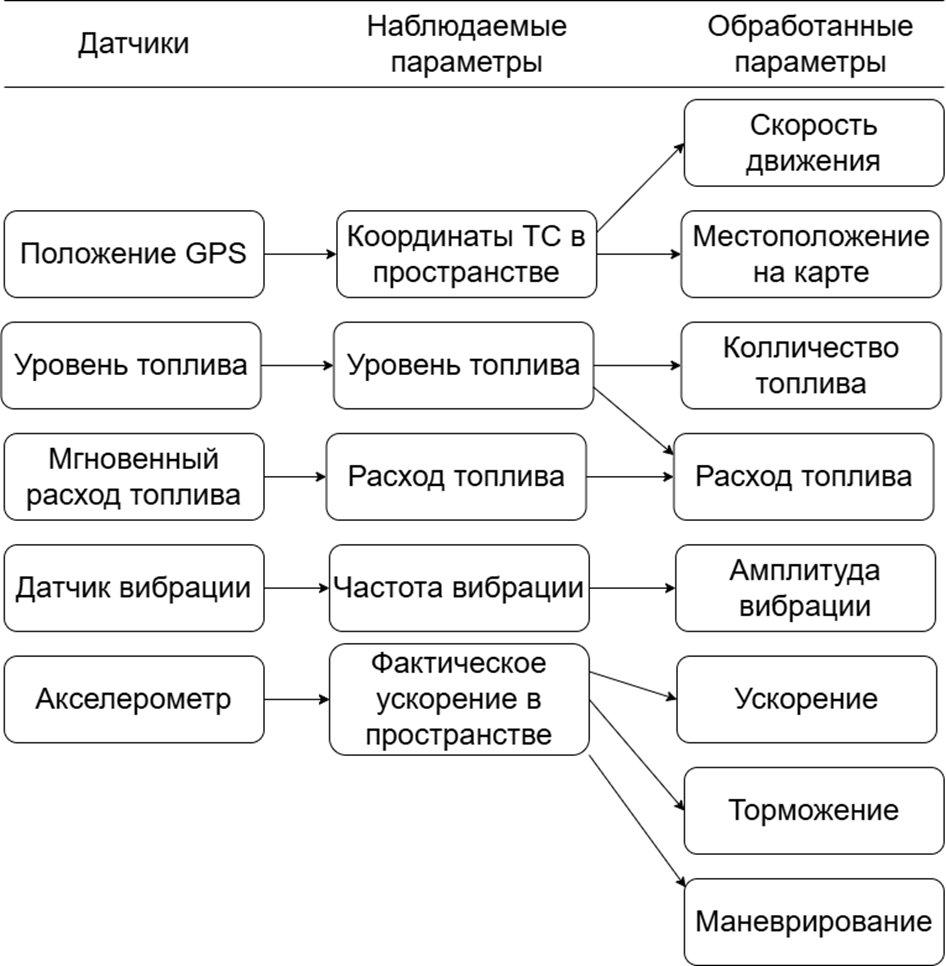
Рис. 2. Входные параметры алгоритма
Алгоритм оценки вождения. Для оценки стиля вождения водителя происходит анализ его действий по управлению ТС (ускорение, замедление, маневрирование, поддержание определенных оборотов двигателя) применительно к допустимым параметрам движения (загрузка ТС, максимально допустимая скорость, загруженность дорог, состояние дорожного покрытия).
Алгоритм (рисунок 3) реализован в 5 основных этапов:
- Предварительная обработка собранных данных (профайлинг) с датчиков с целью оценки их качества, и при необходимости применения к ним средств очистки данных: заполнение пропусков, подавление аномальных значений, исключение дубликатов и противоречий.
- Классификация таких событий поездки как разгон, равномерная езда, торможение, остановка, стоянка;
- Анализ маршрута и дорожной обстановки;
- Классификация таких действий водителя, как расход топлива, движение в потоке, агрессивность езды и соблюдение ПДД и ЕСТР;
- Анализ критериев применительно к выявленным событиям с учетом их веса и длительности.
Результатом работы алгоритма является количественные оценки таких характеристик, как агрессивность вождения, бережность обращения с ТС, экономность распоряжения топливом и выбор оптимального пути и времени движения. Полученные данные позволяют оценить работу водителя по сравнению с другими водителями (после сбора достаточного количества статистики по рейсам), так и выявить нарушения ПДД, ЕСТР и правил эксплуатации транспортного средства.
Сегментирование событий. Для упрощения обработки данных маршрут движения разбивается на сегменты, которые обрабатывается по отдельности для классификации событий во время управления ТС, а затем как единое целое – для классификации действий водителя во время рабочей смены.
Выявление и классификация событий во время управления ТС. Производится классификация таких событий поездки как начало движения, разгон, движение с постоянной скоростью, торможение, движение накатом, маневрирование в движении, маневрирование на стоянке, остановка и отдых.
Например, событие “Движение с постоянной скоростью” определяется как поддержание скорости в пределах ±10 км/ч (изменение скорости более 10 км/ч рассматриваем как изменение дорожной обстановки). Критерий равномерности скорости движения при этом событии рассчитывается по количеству циклов изменения вектора скорости за единицу времени.
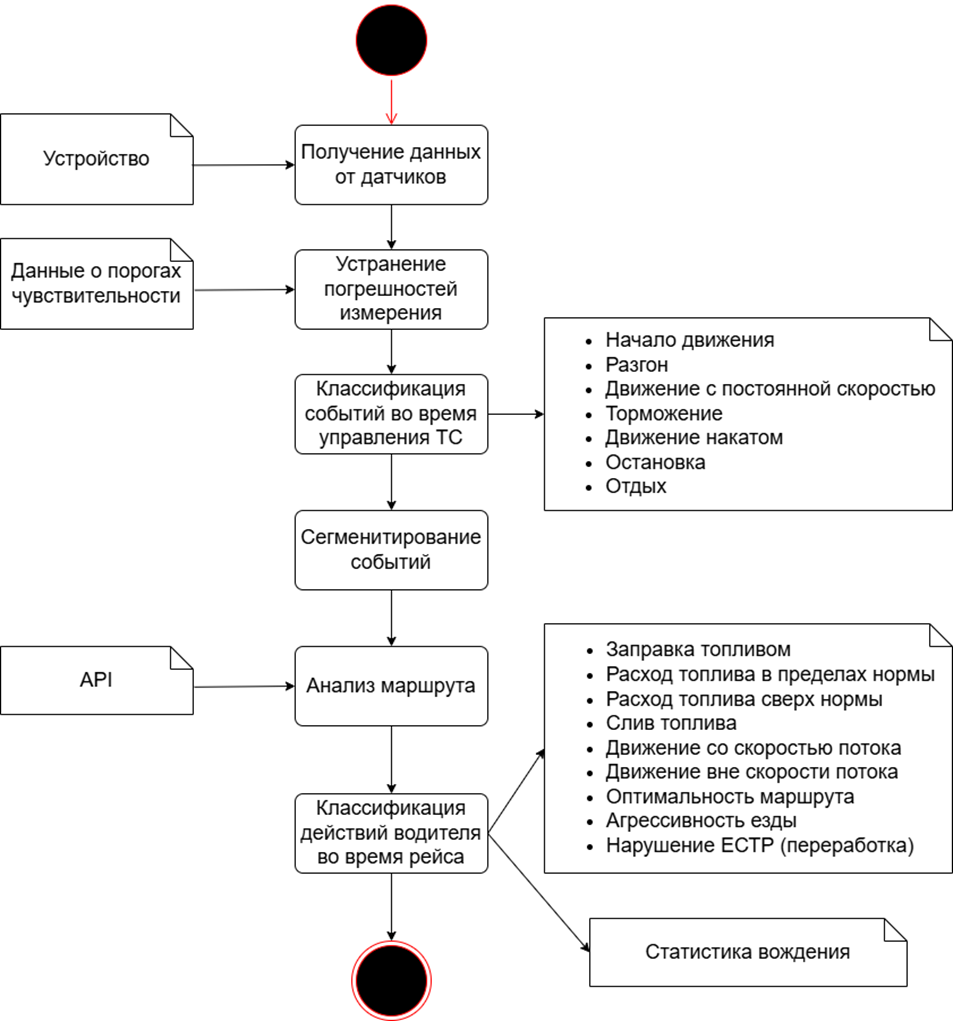
Рис. 3. Алгоритм обработки и анализа данных
Колебания скорости до 2 км/ч вызваны гистерезисом круиз контроля и не учитываются системой. При возникновении замедления впереди идущего автомобиля несоблюдение дистанции вынуждает производить торможение, в результате появляется волновой эффект пульсаций скорости всего потока машин.
Событие “Разгон” имеет критерий “Разгон”, который показывает эффективность разгона, который должен происходить в зеленой зоне тахометра. Если разгон слишком медленный, то при наличии АКПП переключение на следующую передачу приводит к падению оборотов до 850 об/мин, а зеленый сектор эффективной работы турбины начинается с 1000 об/мин. Если же разгон слишком интенсивен, то АКПП переключает передачи в диапазоне 1300-1650 об/мин, что также выходит за пределы зеленого сектора тахометра. При любом типе КПП слишком интенсивный разгон приводит к большим нагрузкам в системе привода и шинах.
Для каждого события в системе задан вес, который при анализе данных, вместе с продолжительностью события, влияет на результат критерия.
Анализ маршрута. Производится анализ выбранного водителем маршрута на предмет дорожной обстановки (транспортные заторы, дорожные ограничения) для анализа, насколько скорость движения ТС соответствует разрешенной на отдельных участках пути с использованием данных WebAPI от сервиса probki.net [3].
Классификация действий водителя во время работы. Производится классификация действий водителя, связанных с выполнением рейса:
- Заправка топливом;
- Расход топлива в пределах нормы;
- Расход топлива сверх нормы;
- Слив топлива;
- Движение со скоростью потока;
- Движение вне скорости потока;
- Агрессивность езды – выход за установленные пределы значений ускорений (положительное для разгона, отрицательное для торможения и боковое для маневрирования);
- Нарушение ПДД – превышение максимально разрешенной скорости движения, движение во время действия ограничений (весенние, из-за паводков и летние, из-за высокой температуры), движение в зонах ограничений движения для большегрузных ТС;
- Нарушение режима эксплуатации ТС – анализ таких параметров, как обороты двигателя, давление в шинах, амплитуду вибрации и фиксация случаев выхода этих параметров за заданные границы;
- Нарушение технического состояния ТС – выявление превышения мгновенного расхода топлива над расчетным для текущей скорости, оборотов двигателя и величины ускорения, а также ошибок, связанных с выходом из строев компонентов ТС;
- Нарушение конвенции ЕСТР – отсутствие ежедневного периода отдыха, превышение ежедневной продолжительности управления, допускаемой по конвенции ЕСТР;
- Невыработка рабочего времени – ежедневная продолжительности управления сильно меньше 9 часов приводит к неиспользованию рабочего времени для движения (требует ручного анализа, так как может быть связана с временными ограничениями на дорогах или ожиданием готовности груза к перевозке, либо очередями при прохождении пограничного контроля).
Применение на практике. Описанный алгоритм анализа данных о работе водителей и транспортных средств был применен на практике. Результатом запуска системы стал больший объем данных для анализа. В результате проведения этого анализа были выявлены технических вопросов, которые были проанализированы и по результатам были приняты решения, позволяющие улучшить работу автотранспортного предприятия как в краткосрочной, так и в долгосрочной перспективе.
Полученные предприятием данные также были проанализированы для внесения доработок и исправлений в аппаратно-программную систему, что позволит повысить как эффективность ее работы, так и качество и оперативность получаемых данных.
Планируется расширение функционала системы в части количества обрабатываемых параметров автомобиля за счет сбора данных шины CAN и последующей обработки полученных пакетов информации на сервере. Это позволит производить дешифровку программным способом, что даст большую гибкость в использовании разных марок автомобилей с разными алгоритмами кодирования данных в используемых CAN-шинах.
Заключение. Разработан алгоритм анализа телематических данных грузового автомобиля. В дополнение к тактическим событиям непосредственного управления ТС и стратегическим событиям о поведении на дороге и выполнения работы водителем во время рейса получена возможность анализа маршрута.
Практическое применение алгоритма в разработанной системе показало наличие потенциала расширения функций в части сбора данных о работе современного автомобиля с его шины CAN.
