Введение.
Рассматриваются в игровой постановке задача оптимального управления по принципу обратной связи динамической системой, которые описывается нелинейными дифференциальными уравнениями. Особенность рассматриваемых задач – в неполноте информации о помехах, действующих на управляемый объект. Критерии качества процесса управления задаются в виде функционалов от движения объекта. Такие задачи занимают достаточно большое место среди задач управления в технике, экономике и т.д. Приводятся методы построения оптимальных алгоритмов. Рассматриваемая задача продолжает исследования авторов [2, 3] по определению оптимальных алгоритмов управления в рамках концепции Екатеринбургской школы по управлению и дифференциальным играм Н.Н. Красовского [4-6].
Объект управления. Рассматривается конфликтно-управляемый объект, движение которого описывается нелинейным векторным дифференциальным уравнением
x=f(t, x, u, υ), t0≤t≤ϑ, u∈P, υ∈Q, (1)
|f(t, x, u, υ)| ≤ χ⋅(1+|x|), χ=const
где x – n-мерный вектор, t – время, начальный и конечный моменты времени t0 и ϑ зафиксированы, u – s -мерный вектор управления, v – r-мерный вектор помехи, P и Q – компакты, символ |x| – обозначает евклидову норму вектора x.
Функцию f полагаем непрерывной по t, u, υ и в каждой ограниченной области G пространства {x} удовлетворяющей условию Липшица по x с константой LG, т.е.
|f(t, x(1), u, υ) - f(t, x(2), u, υ)|≤
≤LG|x(2)-x(1)|,
где x(i)∈ G, i = 1,2.
Предполагается, что выполняется условие седловой точки для маленькой игры [7], то есть

 (2)
(2)
где l – любой n – мерный вектор, символ ⟨l⋅f(t, x, u, υ)⟩ – обозначает скалярное произведение векторов в пространстве Rn.
Критерий качества процесса управления. В качестве критерия, определяющего цель управления игроков, будем рассматривать некоторый функционал, зависящий от движения объекта на всём отрезке времени управления, называемый позиционным [2, 3].
γ=γ(x[t],t0≤t≤ϑ). (3)
В рамках концепции антагонистических дифференциальных игр [1-9] здесь рассматривается задача на минимакс заданного критерия качества (3), то есть о выборе в схеме обратной связи [3, 9] управлений минимизирующих и выборе помех максимизирующих величину критерия (3).
Оптимальные стратегии. Экстремальный сдвиг. Известно, что при выполнении условия (2) для функции f (1) задачу можно решать в классе чистых позиционных стратегий [2, 3, 6, 9].
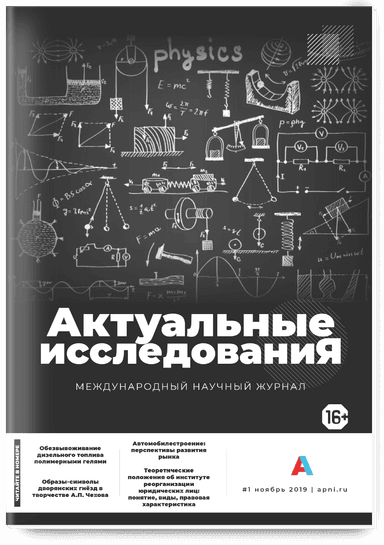
u(ti(u),x[ti(u)],εu) ∈ P, i=1,...,ku,
υ(ti(υ),x[ti(υ)],ευ) ∈ Q, i=1,...,kυ,
т.е. рассматривается следующая схема управления [3, 9] (рис. 1).
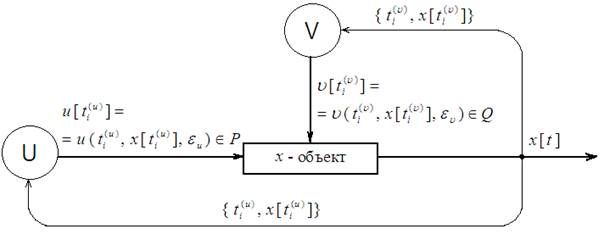
Рис. 1. Схема управления по принципу обратной связи
Ниже предлагается некоторый оригинальный и конструктивный метод построения оптимальных стратегий игроков – метод экстремально сдвига на сопутствующие точки, идея которого принадлежит авторам.
Для использования этого метода построения оптимальных управляющих воздействий игроков требуется для выбранного критерия качества (3) и ресурсов управляющих воздействий P и Q в (1) уметь вычислять цену игры [5, 9] для любой возможной позиции {t, x} объекта (1).
ρ0(t,x)=ρu0(t,x)=ρυ0(t,x),
где


соответственно оптимальные гарантированные результаты первого и второго игроков [3, 5].
Рассмотрим для простоты изложения случай, когда разбиения заданного отрезка времени управления в (1) являются одинаковыми для обоих игроков
ti+1-ti≤δ, i=1,…,k,
хотя как видим из схемы управления на рис. 1 они могут быть и различными.
Итак, содержательный смысл метода экстремального сдвига на сопутствующие точки имеет такой вид. Пусть реализовалась позиция
{ti,x[ti]}, i=1,…,k-1
объекта (1) в схеме управления по принципу обратной связи (рис. 1).
Окружаем эту позицию шариком достаточно малого радиуса с n-мерными точками w. Далее находим точки, в которых цена игры наименьшая и наибольшая соответственно для первого и второго игроков. Эти точки называем сопутствующими точками. И, наконец, совершаем сдвиг (или первый и второй игрок выбором своих управлений) – пытаемся сдвинуть фазовую точку нашего объекта к своим сопутствующим точкам.
Формально, в математической форме это выражается так.
Выбираем шар K с точками w
K=K(ε)={w∈Rn : |w-x[ti] ≤ε|,
i=1,…,k-1.
Находим сопутствующие точки игроков, удовлетворяющие условиям

i=1,…,k-1,

i=1,…,k-1.
Строим n-мерные векторы

и выбираем управления
u0[t] = u0[ti] = u0(ti,x[ti],ε), υ[t] = υ0[ti] = υ0([ti], x[ti],ε), ti ≤ t ≤ ti+1,
исходя из условий


Совершаем указанный экстремальный сдвиг на сопутствующие точки.

Рис. 2. Экстремальный сдвиг
Аналогично плану доказательства из работ [5, 6, 9] устанавливается, что стратегии, построенные методом экстремального сдвига, являются оптимальными в позиционной дифференциальной игре для объекта (1) с критерием качества (3).
