Явление хаотической синхронизации было открыто в середине 80-х годов прошлого века. Вид простейшей схемы синхронизации двух хаотических систем представлен на рис. 1.
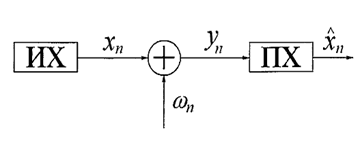
Рис. 1. Схема синхронизации: ИХ – источник хаоса; ПХ – приемник хаоса;  – хаотический сигнал;
– хаотический сигнал;  – шум;
– шум;  – сигнал на входе приемника;
– сигнал на входе приемника;  – сигнал на выходе приемника
– сигнал на выходе приемника
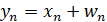
В ней предполагается непосредственное воздействие физического процесса  ведущей системы – источника хаоса (ИХ) на физический процесс ведомой системы – приемника хаоса (ПХ), при наличии в общем случае шума
ведущей системы – источника хаоса (ИХ) на физический процесс ведомой системы – приемника хаоса (ПХ), при наличии в общем случае шума  в канале [1]. Сигнал на входе ведомой системы имеет вид
в канале [1]. Сигнал на входе ведомой системы имеет вид
 .
.
Физический процесс на выходе ведомой системы  представляет собой оценку сигнала
представляет собой оценку сигнала  на выходе ведущей системы.
на выходе ведущей системы.
Одним из факторов, препятствующих практическому применению хаотической синхронизации, является ее высокая чувствительность к шумам и другим возмущающим воздействиям [5]. Фундаментальной причиной такой чувствительности является наличие информации в самом хаотическом сигнале. Существуют методы синхронизации, в которых от ведущей системы к ведомой передается не сам хаотический сигнал, а информация о нем, достаточная для его восстановления в ведомой системе [2]. В качестве передаваемой информации о хаотическом сигнале может использоваться символическая последовательность. Эта последовательность соответствует "символической" динамической системе, которая эквивалентна исходной хаотической системе, в том смысле, что по ее траектории возможно однозначное восстановление исходных хаотических последовательностей.
Выберем в качестве хаотической системы несимметричное тент-отображение, когда μ≠12. Рассмотрим двоичное представление переменной  . В качестве примера выберем
. В качестве примера выберем  и перепишем его в виде x0=0.01010000011000000000. Проследим за преобразованием
и перепишем его в виде x0=0.01010000011000000000. Проследим за преобразованием  при применении к нему отображения
при применении к нему отображения
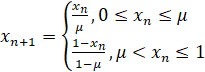 (1)
(1)
в случае μ=0.7. Серия отсчетов  имеет следующий вид
имеет следующий вид
x0=0.010100000110(00000000),
x1=0.01110010110100100100,
x2=0.10100100000001111100.
Таким образом, действие отображения (1) на начальное условие  в случае
в случае  приводит к отображению информации об
приводит к отображению информации об  , а также обо всех последующих значениях отсчетов, не только в старшие разряды мантиссы, но и в младшие [3]. Однако, при расчетах с конечной точностью, возмущения в младших разрядах не учитываются, что приводит в процессе итерирования к потере части информации о состоянии системы. Это означает, что в несимметричном случае вероятность ошибочной идентификации состояния ведущей системы даже в отсутствии шумов не равна нулю.
, а также обо всех последующих значениях отсчетов, не только в старшие разряды мантиссы, но и в младшие [3]. Однако, при расчетах с конечной точностью, возмущения в младших разрядах не учитываются, что приводит в процессе итерирования к потере части информации о состоянии системы. Это означает, что в несимметричном случае вероятность ошибочной идентификации состояния ведущей системы даже в отсутствии шумов не равна нулю.
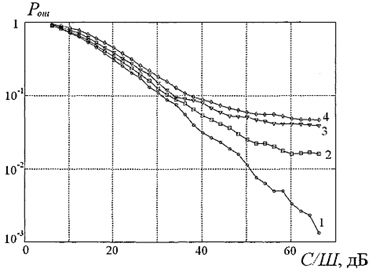
Рис. 2. Вероятность ошибочного восстановления ведущей системы.
Кривая 1 – μ = 0.5, кривая 2 – μ = 0.6, кривая 3 – μ = 0.7, кривая 4 – μ = 0.8
Вероятность ошибочного восстановления состояния ведущей системы Pош зависит от значения параметра μ (рис. 2). Из графика на рис. 2 видно, что чем больше параметр μ отличается от значения 1/2, тем выше вероятность ошибочной идентификации состояния ведущей системы.
Сформулируем алгоритм синхронизации на основе информации о состояниях ведущей системы для несимметричного тент-отображения. На вход ведомой системы с выхода ведущей системы поступает последовательность зашумленных в канале отсчетов  . В приемнике с помощью обратного итерирования по последовательности
. В приемнике с помощью обратного итерирования по последовательности  , где М - точность вычисления компьютера, происходит восстановление значения
, где М - точность вычисления компьютера, происходит восстановление значения  . Для того, чтобы проверить является ли восстановленное значение
. Для того, чтобы проверить является ли восстановленное значение  точным состоянием ведущей системы
точным состоянием ведущей системы  и, следовательно, произошла ли точная синхронизация, запускается процесс итерирования идентичный процессу итерирования, происходящему в ведущей системе, с начальным значение
и, следовательно, произошла ли точная синхронизация, запускается процесс итерирования идентичный процессу итерирования, происходящему в ведущей системе, с начальным значение  . Если через М итераций значения отсчетов последовательностей
. Если через М итераций значения отсчетов последовательностей  и
и  разойдутся на величину большую уровня шума в канале σ, то восстановленное значение
разойдутся на величину большую уровня шума в канале σ, то восстановленное значение  не будет являться точным значением состояния ведущей системы
не будет являться точным значением состояния ведущей системы  и процесс вхождения в синхронизацию должен быть повторен для следующего значения состояния ведущей системы
и процесс вхождения в синхронизацию должен быть повторен для следующего значения состояния ведущей системы  . В противном случае пара ведущая-ведомая система является синхронизованной.
. В противном случае пара ведущая-ведомая система является синхронизованной.
В [4] предложен подход к очистке хаотического сигнала, согласно которому выбор ветви при обратной итерации текущего состояния  проводится на основе самого значения предыдущего отсчета
проводится на основе самого значения предыдущего отсчета  . Используем данный подход для построения алгоритма восстановления точного состояния ведущей системы.
. Используем данный подход для построения алгоритма восстановления точного состояния ведущей системы.
Пусть в качестве хаотического источника используется тент-отображение (1) и точность вычислений ограничена М битами. На вход приемника поступает последовательность зашумленных отсчетов. Для восстановления n-го состояния ведущей системы воспользуемся обратным тент-отображением
 (2)
(2)
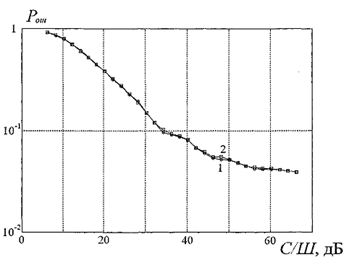
Рис. 3. Вероятность ошибочного восстановления ведущей системы для разных алгоритмов при μ = 0.7
Восстановление начнем с отсчета  . На первом шаге из двух прообразов точки
. На первом шаге из двух прообразов точки  выбираем тот, который ближе к отсчету
выбираем тот, который ближе к отсчету  и обозначим его
и обозначим его  . На втором шаге из двух прообразов отсчета
. На втором шаге из двух прообразов отсчета  выбираем тот, который ближе к
выбираем тот, который ближе к  и обозначаем его
и обозначаем его  . Процесс продолжается до получения отсчета
. Процесс продолжается до получения отсчета  , который и рассматривается в качестве восстановленного значения состояния ведущей системы
, который и рассматривается в качестве восстановленного значения состояния ведущей системы  . Остается определить произошла ли синхронизация. Подействуем отображением (1) на восстановленное значение
. Остается определить произошла ли синхронизация. Подействуем отображением (1) на восстановленное значение  и через М итераций сравним значения отсчетов
и через М итераций сравним значения отсчетов  и
и  . Если имеет место выражение
. Если имеет место выражение
 ,
,
то при синхронизации произошла ошибка и процесс восстановления необходимо повторить для другого состояния системы. В противном случае пара ведущая-ведомая система является синхронизованной.
На рис. 3 приведена зависимость вероятности ошибочной идентификации состояния Pош от отношения сигнал шум в канале для описываемого подхода в сравнении с предыдущим алгоритмом при μ=0.7. Из графика видно, что и первый и второй алгоритмы дают приблизительно одинаковые результаты по вероятности точной синхронизации.
