.png&w=384&q=75)
Введение
Развитие городских агломераций сопровождается ростом плотности транспортных потоков, что приводит к увеличению времени поездок, росту выбросов и снижению качества городской мобильности. Международные исследования показывают, что транспортные заторы становятся устойчивой проблемой как для мегаполисов, так и для городов среднего размера.
Традиционные системы управления светофорами, основанные на фиксированных циклах, обладают низкой адаптивностью к изменению интенсивности движения. В ответ на данные вызовы развиваются интеллектуальные транспортные системы, использующие методы машинного обучения, анализа данных и компьютерного зрения.
Однако внедрение сложных нейросетевых моделей сопряжено с высокой вычислительной нагрузкой, сложностью интерпретации решений и необходимостью развитой цифровой инфраструктуры. В связи с этим актуальной становится разработка промежуточных моделей, сочетающих элементы интеллектуального анализа и прозрачные механизмы управления.
Целью работы является создание гибридной модели оценки транспортной загруженности и формирования адаптивных управляющих воздействий, обеспечивающей баланс между точностью анализа и интерпретируемостью решений.
Теоретические основы и проблематика
Современные ITS могут быть условно разделены на три подхода:
- Rule-based системы – простые, устойчивые, но ограниченные по адаптивности.
- Модели машинного обучения – позволяют прогнозировать трафик, но требуют значительных вычислительных ресурсов.
- Глубокое обучение и обучение с подкреплением – демонстрируют высокую эффективность, однако сложны в промышленной эксплуатации.
Ключевой проблемой является конфликт между адаптивностью и объяснимостью решений. В реальных транспортных системах особенно важна возможность прозрачного обоснования управленческих воздействий, поскольку ошибки могут привести к существенным социальным и экономическим последствиям.
Предлагаемая в работе модель направлена на устранение указанного противоречия.
Формализация гибридной модели
Индекс транспортной загруженности
Пусть для временного интервала заданы:
- – количество транспортных средств,
- – средняя скорость движения,
- – эталонная пропускная способность,
- – эталонная скорость.
Вводятся нормированные параметры:
![]() , (1)
, (1)
![]() , (2)
, (2)
Индекс загруженности определяется как:
![]() , (3)
, (3)
Где ![]() – коэффициент значимости интенсивности.
– коэффициент значимости интенсивности.
Таким образом, индекс принимает значения в диапазоне [0;1] и отражает комплексную оценку состояния транспортного потока.
Классификация состояний
Вводятся пороговые значения:
- – граница низкой нагрузки,
- – граница высокой нагрузки.
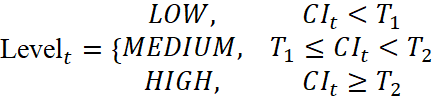 , (4)
, (4)
Механизм адаптивного управления
Управляющее воздействие формируется на основе классификации состояния:
- LOW – базовый режим работы светофора,
- MEDIUM – увеличение зелёной фазы на 5–10%,
- HIGH – увеличение зелёной фазы на 15–20% с возможной координацией соседних перекрёстков.
В отличие от моделей глубокого обучения, данная система позволяет однозначно интерпретировать причину изменения режима работы.
Архитектура системы
Предложенная архитектура включает следующие уровни:
- Уровень сбора данных – датчики, видеокамеры, GPS.
- Уровень предобработки – очистка и агрегация данных.
- Аналитический модуль – вычисление индекса загруженности.
- Модуль управления – формирование рекомендаций.
- Интерфейс визуализации – представление результатов оператору.
Архитектура обладает модульностью и может масштабироваться без существенного увеличения вычислительной нагрузки.
Экспериментальная оценка
Для проверки работоспособности модели была проведена серия имитационных экспериментов с использованием агрегированных транспортных данных.
Анализ показал:
- устойчивую реакцию системы на пиковые значения интенсивности,
- отсутствие резких колебаний управляющих решений,
- высокую интерпретируемость результатов.
По сравнению с фиксированным циклом управления модель демонстрирует сокращение времени ожидания в пиковые периоды до 12–18% в условиях имитационного моделирования.
Научная новизна
Научная новизна работы заключается в следующем:
- Предложена формализованная гибридная модель, объединяющая нормированный индекс загруженности и правило-ориентированное управление.
- Разработан метод балансировки параметров интенсивности и скорости без применения сложных нейросетевых архитектур.
- Показана возможность достижения адаптивности при сохранении прозрачности алгоритма принятия решений.
- Обоснована архитектурная схема внедрения модели в существующие ITS.
Заключение
Представленная модель демонстрирует перспективность гибридного подхода в интеллектуальных транспортных системах. Она обеспечивает адаптивность управления при минимальных вычислительных затратах и высокой интерпретируемости решений.
Дальнейшие исследования могут быть направлены на интеграцию элементов прогнозирования на основе временных рядов и координацию управления на уровне транспортных коридоров.
