.png&w=384&q=75)
Введение
Современные бионические протезы верхней конечности представляют собой сложные мехатронные системы, функциональность и эргономика которых во многом определяются качеством системы управления. Одним из наиболее перспективных направлений развития таких систем является нейроуправление на основе электромиографических сигналов, регистрируемых с поверхности мышц пользователя [2, с. 275-294; 3, с. 643-660; 4].
Классические методы миоэлектрического управления, основанные на пороговой обработке амплитуды ЭМГ или использовании простых линейных классификаторов, позволяют реализовать лишь ограниченное число степеней свободы и требуют значительной адаптации со стороны пользователя [3, с. 643-660]. Кроме того, такие методы плохо масштабируются при увеличении количества управляемых движений и демонстрируют снижение точности в условиях межсессионной вариабельности сигналов [5, с. 7420-7431].
Применение методов машинного обучения и, в частности, искусственных нейронных сетей позволяет существенно расширить возможности нейроуправляемых протезов. Нейросетевые модели способны автоматически извлекать информативные признаки из сигналов, учитывать нелинейные зависимости и повышать устойчивость распознавания двигательных намерений пользователя [7; 8, с. 33-41]. Это особенно важно для протезов с большим числом степеней свободы и для реализации более естественных и интуитивных схем управления [6, с. 1250-1258].
Целью настоящей работы является анализ нейросетевых методов обработки и классификации электромиографических сигналов в задачах нейроуправления бионическими протезами верхней конечности, а также формирование методического подхода к их реализации на встроенных вычислительных платформах с учётом требований реального времени.
Обзор существующих подходов к нейроуправлению бионическими протезами
Развитие систем нейроуправления бионическими протезами прошло несколько этапов, каждый из которых характеризуется использованием различных принципов обработки биосигналов и алгоритмов управления.
На ранних этапах применялись пороговые и пропорциональные методы, в которых управление приводами протеза осуществлялось на основе амплитуды ЭМГ-сигнала от одной или нескольких мышц. Такие системы отличались простотой и высокой надёжностью, однако позволяли управлять лишь одной-двумя степенями свободы и требовали значительных усилий по обучению пользователя [2, с. 275-294].
Следующим этапом стало развитие методов распознавания паттернов ЭМГ, при которых управление строится на классификации заранее определённого набора жестов или движений. Данный подход позволил существенно расширить функциональность протезов и улучшить эргономику управления, однако столкнулся с проблемами устойчивости при изменении условий регистрации и необходимости частой перекалибровки [3, с. 643-660].
Современные исследования ориентированы на использование нейросетевых и глубоких моделей, которые демонстрируют высокую точность классификации и способность работать с многоканальными сырыми данными. Особенно перспективными являются сверточные и рекуррентные нейронные сети, позволяющие учитывать временную структуру ЭМГ-сигналов и распознавать сложные и одновременные движения [6, с. 1250-1258; 7; 8, с. 33-41].
Несмотря на значительный прогресс, перенос нейросетевых методов из лабораторных условий в клиническую практику остаётся сложной задачей, что связано с требованиями к надёжности, задержке обработки и вычислительным ресурсам встроенных систем [4].
Архитектура системы нейроуправления бионическим протезом
Общая структура системы
Система нейроуправления бионическим протезом представляет собой многоуровневую архитектуру, включающую аппаратные и программные компоненты, функционирующие в режиме реального времени.
Типовая структура системы включает следующие функциональные блоки:
- Модуль регистрации ЭМГ-сигналов, состоящий из электродов, аналоговых усилителей и аналого-цифрового преобразователя.
- Модуль предварительной обработки, реализующий фильтрацию, нормализацию и сегментацию сигналов.
- Интеллектуальный модуль интерпретации, в котором осуществляется классификация или регрессия на основе нейросетевой модели.
- Контур управления исполнительными механизмами, обеспечивающий преобразование управляющих команд в движения протеза.
- Модуль обратной связи, повышающий точность и устойчивость управления за счёт визуальных, тактильных или проприоцептивных сигналов.
Подобная декомпозиция позволяет оптимизировать каждый компонент с учётом его функциональных и вычислительных требований [3, с. 643-660; 4].
Требования к работе в реальном времени
Для обеспечения субъективно естественного управления суммарная задержка системы не должна превышать 200–300 мс. Это накладывает жёсткие ограничения на длину окна анализа, сложность нейросетевой модели и скорость выполнения вычислений. Превышение допустимой задержки приводит к снижению точности управления и ухудшению пользовательского опыта [6, с. 1250-1258].
Регистрация и предварительная обработка электромиографических сигналов
Электромиографический сигнал (рис.) является нестационарным и зашумлённым процессом, содержащим полезную мышечную активность и различные помехи. В общем виде сигнал может быть представлен как:
![]() , (1)
, (1)
Где ![]() – полезная компонента,
– полезная компонента, ![]() – суммарные помехи [1, с. 1215-1230; 2, с. 275-294].
– суммарные помехи [1, с. 1215-1230; 2, с. 275-294].
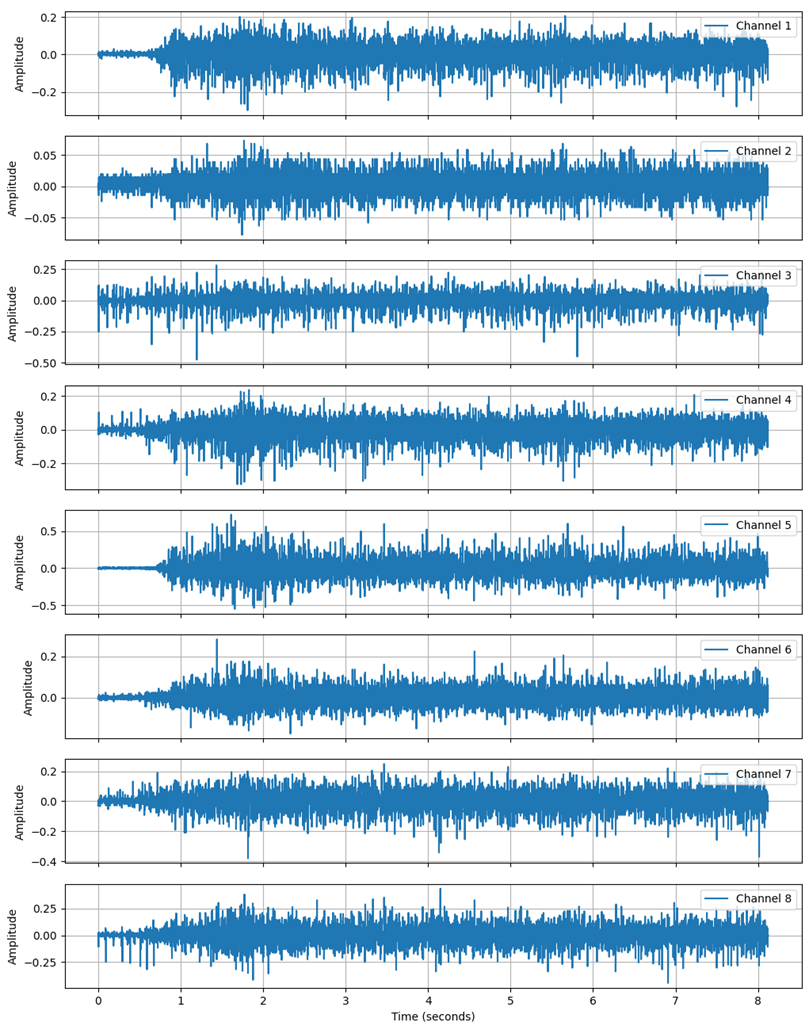
Рис. ЭМГ-сигналы
Частота дискретизации
Дискретизация ЭМГ-сигналов осуществляется с частотой 1000–2000 Гц, что соответствует информативной полосе частот поверхностной ЭМГ (примерно 20–450 Гц) и обеспечивает выполнение условия теоремы Найквиста [1, с. 1215-1230].
Фильтрация
Для подавления дрейфа и высокочастотных помех применяется полосовая фильтрация, как правило в диапазоне 20–450 Гц. Для подавления сетевой наводки используется режекторный фильтр на частоте 50 Гц. Корректность фильтрации является критически важной для последующих этапов распознавания [2, с. 275-294; 3, с. 643-660].
Нормализация
Для снижения межпользовательской и межсессионной вариабельности применяются методы стандартизации, Min–Max нормализации и нормализации по MVC. Выбор метода определяется задачей управления и условиями сбора данных [3, с. 643-660; 5, с. 7420-7431].
Сегментация и формирование обучающих выборок
Для подачи данных на вход нейросетевой модели ЭМГ-сигналы сегментируются по скользящим окнам длительностью 150–250 мс с перекрытием 50–75%. Такой подход обеспечивает компромисс между устойчивостью классификации и задержкой принятия решения [3, с. 643-660; 6, с. 1250-1258].
Формирование обучающей выборки включает разметку данных по классам движений, балансировку классов и разделение данных на обучающую, валидационную и тестовую подвыборки.
Формирование входного пространства нейросетевых моделей
Признаковый подход
В признаковом подходе каждый сегмент ЭМГ преобразуется в вектор признаков фиксированной размерности. Наиболее распространёнными являются временные и частотные признаки, такие как RMS, MAV, длина волны и медианная частота [5, с. 7420-7431].
Преимуществами данного подхода являются низкая вычислительная сложность и устойчивость при ограниченном объёме данных. Основным недостатком является необходимость ручного подбора признаков и снижение переносимости моделей [3, с. 643-660].
Подход на основе сырых данных
При использовании сырых временных рядов задача извлечения информативных представлений полностью перекладывается на нейросетевую модель. Такой подход широко применяется в deep learning и позволяет повысить точность распознавания, однако требует большего объёма данных и вычислительных ресурсов [7; 8, с. 33-41].
Нейросетевые модели классификации ЭМГ-сигналов
В задачах нейроуправления применяются различные архитектуры нейронных сетей.
Многослойные перцептроны (MLP) используются как базовые модели для признаковых векторов и отличаются низкой вычислительной сложностью [5, с. 7420-7431].
Сверточные нейронные сети (CNN) позволяют автоматически извлекать локальные временные паттерны из ЭМГ-сигналов и демонстрируют высокую устойчивость к шуму и смещению электродов [7].
Рекуррентные нейронные сети (LSTM, GRU) учитывают временной контекст и эффективны при распознавании переходных движений, однако обладают повышенной вычислительной сложностью [8, с. 33-41].
Обучение и оценка качества моделей
Обучение нейросетевых моделей осуществляется в офлайн-режиме с использованием размеченных данных. В качестве функции потерь применяется категориальная кросс-энтропия, оптимизация выполняется методами градиентного спуска (например, Adam).
Качество классификации оценивается по метрикам accuracy, precision, recall и матрице ошибок, а также по устойчивости к шумам и смещению электродов [3, с. 643-660; 6, с. 1250-1258].
Реализация нейросетевых моделей на встроенных платформах
Внедрение нейросетевых алгоритмов в нейроуправляемые протезы требует оптимизации моделей за счёт уменьшения числа параметров, квантования весов и вычислений в фиксированной точке. Облегчённые CNN и MLP способны работать в реальном времени на микроконтроллерах при частоте обновления команд 5–10 Гц [6, с. 1250-1258; 8, с. 33-41].
Результаты и сравнительный анализ
Сравнительный анализ нейросетевых моделей показывает, что переход от признаковых моделей к deep learning на сырых данных обеспечивает прирост точности распознавания. При этом CNN демонстрируют наиболее сбалансированное соотношение между точностью и задержкой, что делает их предпочтительными для практической реализации [7; 8, с. 33-41].
Ограничения и проблемы нейросетевых методов
К основным ограничениям относятся межсессионная вариабельность ЭМГ, ограниченный объём обучающих данных, вычислительные ограничения встроенных систем и низкая интерпретируемость решений нейросетей [3, с. 643-660; 4; 5, с. 7420-7431].
Заключение
В работе показано, что нейросетевые методы являются эффективным инструментом для нейроуправления бионическими протезами верхней конечности. Наиболее перспективными для практического применения являются облегчённые сверточные нейронные сети, обеспечивающие баланс между точностью, устойчивостью и быстродействием. Полученные результаты формируют методическую основу для разработки адаптивных и высокоэффективных протезных систем нового поколения.
