Фазовое пространство динамической системы имеющей составной хаотический мультиаттрактор, можно представить как совокупность ячеек, каждая из которых содержит локальный хаотический аттрактор, которому соответствует локальная система координат, отвечающая исходным уравнениям движения [1-5].
Для того чтобы иметь возможность задавать различную пространственную ориентацию локальных аттракторов, необходимо ввести в уравнения движения дополнительные константы, задающие поворот локальных систем координат относительно исходного координатного базиса, и присвоить им различные значения в каждой фазовой ячейке.
Пусть исходная автостохастическая система задана в системе координат  :
:
 , (1)
, (1)
где  – множество констант.
– множество констант.
Запишем её в новой системе координат  , имеющей общий центр с системой координат x0, но повернутой на некоторый угол Ψ относительно проходящей через начало координат оси с направляющими косинусами
, имеющей общий центр с системой координат x0, но повернутой на некоторый угол Ψ относительно проходящей через начало координат оси с направляющими косинусами  [6]:
[6]:
 . (2)
. (2)
Мультиаттракторная система на основе уравнений (2) в общем виде будет выглядеть следующим образом [3, 5]:
 , (3)
, (3)
где  – множество реплицирующих операторов.
– множество реплицирующих операторов.
Чтобы каждый локальный аттрактор получил индивидуальную пространственную ориентацию, заменим в уравнениях (3) константы y и b специальными нелинейными функциями (назовем их ориентирующими), присваивающими этим константам различные значения в пределах каждой ячейки фазового пространства:
 , (4)
, (4)
где b(x) и Ψ(x) – ориентирующие функции, задающие соответственно оси поворота и величины углов поворота локальных систем координат в каждой фазовой ячейке.
Так как при повороте локального аттрактора изменяются его протяженность по переменным репликации и положение относительно границ содержащей его фазовой ячейки, в уравнения (4) необходимо ввести также масштабирующие и симметрирующие функции, задающие индивидуальные значения масштабирующих и симметрирующих коэффициентов в каждой фазовой ячейке [5]. В окончательном виде уравнения динамической системы, имеющей мультиаттрактор, состоящий из различно ориентированных хаотических аттракторов системы (1) будут иметь вид:
 , (5)
, (5)
где Θ(x) и Φ(x) – соответственно симметрирующие и масштабирующие функции.
Проиллюстрируем результат применения данной технологии на следующем примере. В качестве исходной динамической системы используем вариант уравнений Лоренца:
 (6)
(6)
отличающийся от классической формы записи [7] тем, что стационарные особые точки лежат на координатной оси ОХ1 (рис.1).

Рис. 1. Проекция аттрактора системы (6) на плоскость (x1, x3) при А=10.5, В=28, С=8/3
Рассмотрим вращение локальных аттракторов в мультиаттракторной системе, полученной из (6) заменой независимых переменных x1, x3 реплицирующими операторами H1(x1), H3(x3), заданными уравнениями
 (13)
(13)
 ,
,  ,
,
где hj – половина протяженности фазовой ячейки, содержащей хаотический аттрактор исходной динамической системы, по j-й переменной репликации, dj – модуль крутизны промежуточных сегментов реплицирующей функции по j-й переменной репликации.
При вращении локальных аттракторов относительно осей ортогональных плоскости (x1, x3) уравнения (6) примут следующий вид:
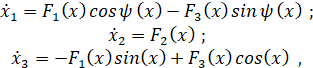 (7)
(7)
где
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
где нелинейные функции y(x1, x3), f(x1, x3), q(x1, x3) задающие соответственно углы поворота локальных аттракторов, согласование их размеров и взаимное расположение в составе мультиаттрактора, определены следующими уравнениями:
 ,
,
 ,
,  ,
,  ,
,
 ,
,  ,
,  ,
,
 ,
,
 ,
,  ,
,  ,
,
где S(x1,x3,W) – структурная функция [5].
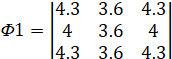
Пример композиционного мультиаттрактора с различной пространственной ориентацией локальных аттракторов, который может быть реализован в системе (7), приведен на рис.2. Ему соответствуют следующие значения констант Ψ, Φ, Θ:
 ,
,  ,
,  ,
,
 ,
,  ,
,  ,
,  .
.
Протяженность локальных аттракторов по всем независимым переменным выбрана равной 5, присвоением соответствующих значений коэффициентам Φ.
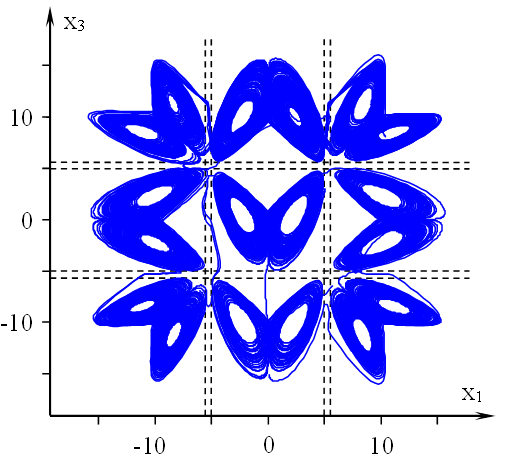
Рис. 2. Пример мультиаттрактора с заданной конфигурацией пространственной ориентации локальных аттракторов. Штриховыми линиями показаны границы фазовых ячеек
