
В современном мире преобладающая часть промышленного производства, транспортных систем, сферы жизнеобеспечения человека в той степени развития, которая достигнута сегодня, основаны на выполнении технологических процессов, где применяется оборудование с электроприводом.
Как известно, электроприводом называется электромеханическая система для преобразования электрической энергии в механическую, основным звеном которой является асинхронный электрический двигатель.
От первых опытов Майкла Фарадея в 1820-х годах, в которых он изучал взаимовлияние магнитов и проводников, до создания современных комплексов управления электроприводом прошло уже почти 200 лет. Первым был изобретён двигатель на постоянных магнитах, который стал прототипом коллекторных двигателей, следующим шагом стало создание электродвигателей переменного тока, далее – первых асинхронных электродвигателей.
В середине прошлого века наметилось разделение развития электропривода на две основные ветви в соответствии с типом применения: на нерегулируемый и регулируемый привод. В нерегулируемом электроприводе большой мощности наиболее применимыми оказались синхронные двигатели, при невысоких мощностях – асинхронные электродвигатели с короткозамкнутым ротором.
Двигатели с короткозамкнутым ротором с давних пор использовались исключительно в нерегулируемом электроприводе, так как возможность плавного регулирования скорости вращения двигателей не была в должной степени технически реализуема. Сейчас, благодаря достижениям микропроцессорной техники и электроники, ситуация кардинально поменялась, и частотно-регулируемый привод (ЧРП) стал основным типом регулируемого электропривода.

Рис. 1. Современные промышленные преобразователи частоты
Частотник векторный или скалярный. Различия.
Техническим стандартом, по которому можно классифицировать современные преобразователи частоты (иначе, частотники или ПЧ, как их сокращенно называют) является метод управления, применяемый в этих устройствах при регулировании скорости вращения двигателя.
Методы управления подразделяются на:
- скалярный метод управления
- векторный метод управления
О различии скалярного и векторного управления электроприводом можно догадаться уже по их названию.
Скалярный метод основан на поддержании постоянства отношения (U/f) в рабочих диапазонах скоростей, в процессе которого ведется контроль, как видно из формулы, только за величиной питающего напряжения и его частотой.
При векторном методе управления ведется контроль не только за величиной и частотой, но и за фазой питающего напряжения. Иначе говоря, контролируется угол и величина так называемого пространственного вектора, который вращается с частотой поля двигателя.
Скалярное управление наиболее применимо в электроприводах небольшой сложности в силу относительной простоты и минимального набора требуемых для работы функциональных параметров. Подходит для применений, где требуется поддерживать постоянство (с ограниченным диапазоном и точностью, по сравнению с векторным) определенной технологической величины, и где отсутствуют большие динамические нагрузки.
Векторный метод управления относительно скалярного имеет большую производительность, диапазон и точность регулирования, в том числе на малых оборотах двигателя, чем перекрывает практически все недостатки скалярного принципа управления.
Тот или иной метод управления выбирается в зависимости от требований, которые заданы для технологического процесса – это глубина и точность регулирования, необходимость управления моментом на валу двигателя, состояние привода при переходных процессах – при пуске/стопе, ускорении, торможении.
Скалярный метод управления
Скалярный метод управления применяют для приводов малой и средней мощности с вентиляторной нагрузкой (т.е. для вентиляторов, насосов, компрессоров, дымососов с легким, либо нормальным режимом работы). Что особенно важно, при использовании скалярного метода имеется возможность управления многодвигательными приводами от одного преобразователя частоты. Жесткость статических характеристик привода практически приближена к естественной характеристике. Диапазон скалярного принципа управления, при котором возможно регулирование оборотов двигателя, без потери момента сопротивления не превышает 1:10. Благодаря этому достигается постоянная перегрузочная способность двигателя, которая не зависит от частоты приложенного напряжения, но на низких частотах может произойти перегрев двигателя и снижение развиваемого им момента. Для того чтобы этого избежать, производят установку ограничения минимального значения выходной частоты.
Рис. 2. Изменение напряжения питания электродвигателя при скалярном управлении
При необходимости увеличения жёсткости характеристики и расширения границ регулирования применяют различные аналоговые или импульсные датчики скорости. Для этого в преобразователях частоты имеются дискретно-аналоговые управляющие входы.
Преобразователи частоты, управление в которых реализовано на методе скалярного управления, как правило, невысокой стоимости, более простые и широко применимы в электроприводе, где отсутствуют критичные требования к точности и диапазону регулирования. При вводе в работу подобных преобразователей достаточно учитывать лишь номинальные величины параметров электропривода, осуществить настройку стандартных опций защиты и управления.
Применение
Учитывая вышеназванные особенности, можно рассмотреть следующие возможности применения для скалярного управления частотным преобразователем:
Системы водоснабжения и водоотведения представляют собой довольно сложную технологическую структуру, основные элементы которой – трубопроводные магистрали и насосные установки.
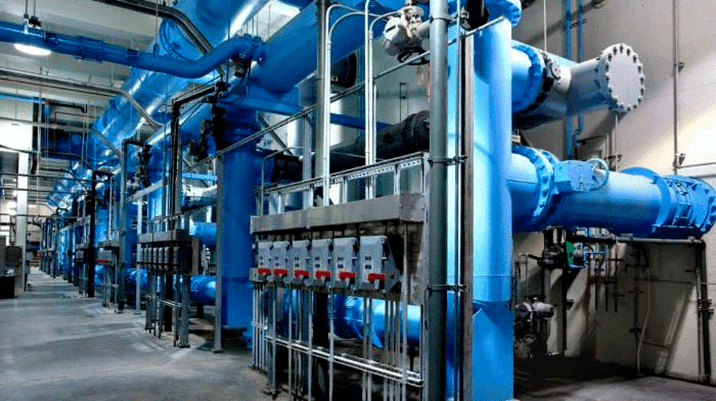
Рис. 3. Электропривод насосных установок
Применение скалярного метода управления для выполнения плавного пуска, торможения и регулирования скорости вращения привода насосов снижает интенсивность гидравлических ударов, что позволяет сократить количество профилактических ремонтов оборудования и вероятность аварийных ситуаций, связанных с механическими нагрузками (преждевременный износ муфт, редукторов, подшипников двигателей).
При увеличении скорости напряжения питания статора пропорционально увеличивается. Скалярное управление способствует удержанию постоянства момента на валу в рабочем диапазоне частот (но на невысоких скоростях момент снижается, для этого в преобразователях частоты есть возможность задания момента для нижней границы скорости).
Для насосных систем имеется возможность настройки в ПЧ следующих полезных функций (в особенности, для тех ПЧ, которые предназначены для систем отопления, вентиляции и кондиционирования – так называемые HVAC системы):
- Функция сна/пробуждения ПЧ – Позволяет остановить асинхронный двигатель в периоды отсутствия, либо существенного уменьшения расхода воды. Тем самым обеспечивается экономия электроэнергии и уменьшается износ оборудования.
- Защита от “сухого хода” – Условие работы всухую возникает, когда давление на входе насоса не соответствует номинальным параметрам. Длительная работа в таком режиме может привести к преждевременному выходу из строя подшипниковых узлов и уплотнений. Контроль рабочего состояния привода производится на основе значений с датчиков расхода и давления в трубопроводе.
- Компенсация потерь на трение – Данная функция контролирует подачу насосной установки и компенсирует потери напора путем поддержания постоянного давления в рабочей точке независимо от расхода воды.
Доступны также другие прикладные функции для оптимизации и защиты насосного привода (контроль заполнения трубопровода, контроль давления/расхода, заклинивания и т.д.).
Важным преимуществом скалярного метода является возможность одновременного управления группой агрегатов. Частотным преобразователем совместно с алгоритмом системы управления производится изменение скорости вращения привода, а также, при необходимости, числа одновременно работающих механизмов.
Вышеописанные прикладные функции имеются в преобразователях частоты и для электроприводов систем вентиляции и кондиционирования.
Векторный метод управления
Преобразователи с частотно-векторным управлением в основном применяют для электроприводов с тяжелым режимом работы (вентиляторы высокой мощности, подъемное, буровое оборудование, системы позиционирования). Векторное управление асинхронным двигателем не только формирует гармонические токи и напряжения фаз (как при скалярном методе), но и позволяет производить регулирование магнитного потока электродвигателя. Таким образом, производится управление магнитным полем статора и ротора, регулируется их взаимодействие между собой для оптимизации момента вращения на различных частотах. При этом улучшается динамика электропривода за счет специального встроенного канала управления моментом нагрузки. Внутренняя обработка процессов регулирования в современных частотниках выполняется на базе мощного процессорного оборудования.
Векторной метод управления заключается в математическом представлении модели двигателя. Возможность такого решения основана на том, что проекция пространственного вектора тока статора на ось полюсов магнитного поля ротора (продольную ось) пропорциональна величине магнитного потока, а проекция на поперечную ось пропорциональна величине электромагнитного момента. Такой более прогрессивный метод позволяет независимо и почти безынерционно регулировать момент на валу и скорость вращения двигателя под нагрузкой.
Главной трудностью для реализации векторной системы управления является определение нахождения оси магнитного поля ротора в пространстве. Данная задача решается при помощи датчиков Холла, установленных в электроприводе, либо расчётом по известным соотношениям, где исходными данными являются мгновенные величины тока, напряжения статора и скорость вращения ротора. В среднебюджетных приводах применяется преимущественно расчётный метод, часто это системы управления двигателем без обратной связи по скорости. Такая система управления называется бездатчиковая – управление по разомкнутому контуру.
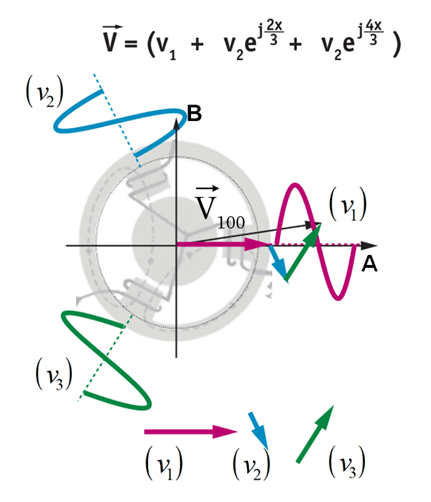
Рис. 4. Пространственный вектор при векторном методе управления
Если требования к точности регулирования скорости допускают отклонение до 1,5%, а диапазон – менее 1:100, то может быть использована бездатчиковая система управления – управление по замкнутому кругу. При требовании точности регулировки скорости с отклонением менее 0,2% и диапазона 1:10000 применяется управление с датчиком скорости на валу. Такие системы называются системами управления двигателем с обратной связью по скорости и позволяют регулировать момент на малых частотах (до 1 Гц).
По сравнению со скалярным, векторное управление асинхронным двигателем с частотным преобразователем имеет следующие преимущества:
- повышенная точность и широкий диапазон регулирования скорости;
- плавное регулирование скорости вращения двигателя во всем диапазоне частот;
- возможность удержания постоянства скорости при изменении нагрузки электропривода;
- уменьшение потерь при переходных процессах в приводе (в связи с этим увеличенный КПД двигателя).
Несмотря на ряд весомых преимуществ стоит отметить, что вычислительная сложность при векторном методе управления высока, и при расчете оптимальных режимов работы привода необходимо учитывать большое количество параметров электропривода. Но там, где требуется обеспечивать широкий диапазон и точность регулирования, особенно на низких частотах вращения, векторный преобразователь частоты будет незаменим.
Применение
В качестве объекта электропривода, где широко применим векторный метод управления, можно привести в пример подъемные механизмы, в частности – лифтовое оборудование.
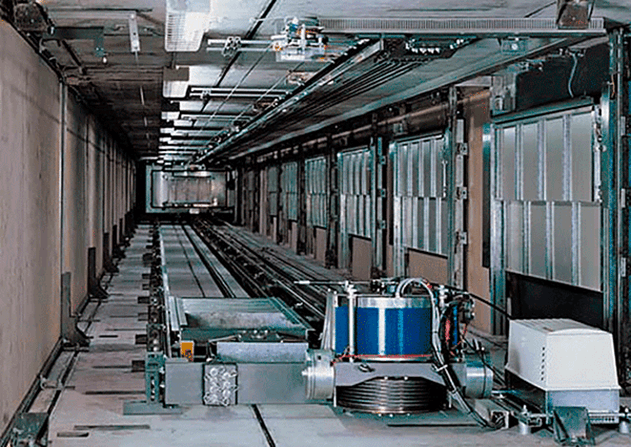
Рис. 5. Электропривод лифтового оборудования
По данным исследований было выявлено, что электропривод, где применен преобразователь частоты для управления лифтовым оборудованием, экономит почти 40% электроэнергии (по сравнению с применениями без ПЧ). Помимо экономии электроэнергии, применение векторных преобразователей частоты обеспечивает следующие преимущества:
- высокое значение крутящего момента двигателя на околонулевой скорости (при разгоне и торможении лифта);
- способность выдерживать большие перегрузки при работе привода;
- высокоточное регулирование скорости и положения кабины лифта при помощи датчиков обратной связи. Обеспечивается диапазон регулирования скорости 1:1000, при этом точность поддержания скорости составляет 0,01%;
- специальные прикладные программы применения (уравновешивание нагрузки, быстрая остановка, компенсация момента инерции привода);
- дополнительные опции обеспечения безопасности в аварийных режимах управления (в том числе, функции аварийного завершения работы, функция перехода на резервный источник питания и т.д.);
- опцию рекуперации (возврата) энергии в питающую сеть при остановке лифта без применения дополнительных тормозных резисторов;
- уменьшение механических нагрузок подъемной системы;
- снижение шума работы привода (благодаря высокой частоте коммутации ПЧ);
- функцию противоотката кабины лифта (исключается откат кабины при отжатии тормозного устройства).
Как показала практика подобных применений, при использовании векторных преобразователей частоты в лифтовых системах окупаемость частотников не превышает 1,5-2 лет. При этом существенно уменьшаются затраты на обслуживание и ремонт электроприводного комплекса лифта.
Выводы
Таким образом, выбирая на практике между скалярным и векторным методом регулирования скорости вращения электропривода, необходимо оценить требования, которые предъявляются к объекту управления – это диапазон и точность регулирования технологических величин, необходимость удержания момента на валу двигателя (в особенности, на малых частотах вращения), требования к контролю привода в аварийных ситуациях.
Отталкиваясь от этого, и принимая во внимание описанные в данной статье особенности применения векторного либо скалярного регулирования, можно сделать выводы о том, какой способ управления является более предпочтительным для Вашего применения.
