
В общем случае в асинхронном ЭП переходные процессы определяются электромагнитной инерционностью обмоток двигателя и механической инерцией движущихся элементов ЭП и исполнительного органа рабочей машины.
Электромагнитные переходные процессы. Двигатель представляет собой электромеханический преобразователь энергии с несколькими магнитосвязанными между собой обмотками статора и ротора, взаимное положение которых при вращении ротора непрерывно изменяется. Вследствие этого возникающие при пуске, реверсе и торможении двигателя переходные токи в обмотках статора и ротора изменяются по сложным временным зависимостям, а определяемый ими электромагнитный момент имеет колебательный характер и является сложной функцией времени. Для примера на рис. 1, а приведены экспериментально снятые графики скорости 1 и момента 2 двигателя при его пуске.
Для сопоставления на рис. 1, б приведены расчетные графики скорости 1 и момента 2 двигателя при пуске, построенные по формулам для статической механической характеристики. Нетрудно отметить существенное различие этих графиков.
Сложный характер имеет и так называемая динамическая механическая характеристика 3 двигателя, для построения которой берутся значения момента и скорости двигателя в одни и те же моменты времени tA переходного процесса (рис. 1, в). Приведенная характеристика отличается от статической механической характеристики 4 того же двигателя, полученной расчетом. Различие между этими характеристиками и определяется протеканием переходных электромагнитных процессов в двигателе.
Момент двигателя в переходном режиме может в несколько раз превосходить момент в статическом режиме из-за того, что переходные токи статора и ротора могут значительно превосходить значения, рассчитанные по формулам для статического режима. Магнитные поля, образуемые переходными составляющими токов, могут либо усиливать, либо ослаблять основное поле, создаваемое принужденными (установившимися) составляющими токов, вызывая соответствующее усиление или ослабление переходного электромагнитного момента. Иногда момент может стать даже отрицательным (тормозным), что можно видеть на начальном участке кривой 3 на рис. 1, в.
Вид динамической характеристики двигателя определяется параметрами его обмоток, моментом нагрузки и моментом инерции ЭП, а характер переходного электромагнитного момента двигателя зависит от вида переходного процесса (пуск, реверс, торможение) и от начального уровня магнитного поля двигателя.
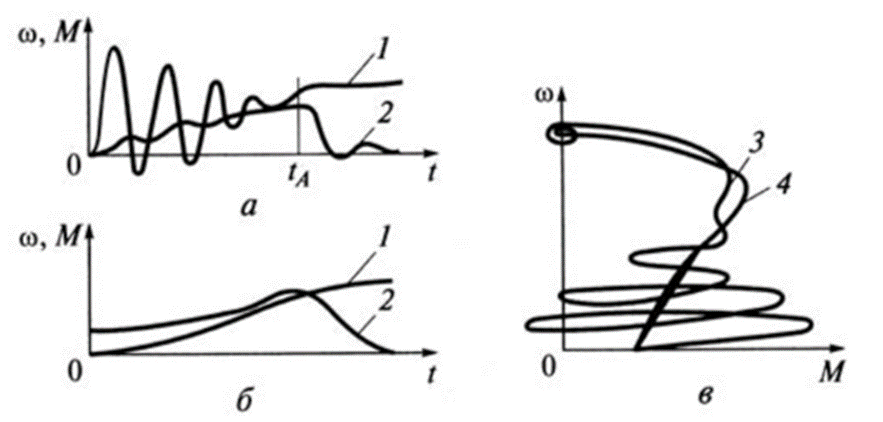
Рис. 1. Кривые переходных процессов при учете электромагнитных процессов (а), без учета электромагнитных процессов (б) и двигателя (в): 1 – графики скорости; 2 – графики момента; 3 – динамические характеристики при учете электромагнитных процессов; 4 – динамические характеристики без учета электромагнитных процессов
Анализ этих зависимостей позволяет отметить, что при большом суммарном моменте инерции и моменте нагрузки кривая момента двигателя в начале переходного процесса имеет много пиков, затухание которых происходит медленно. При малых моментах инерции и нагрузки наблюдается обратная картина.
Большое влияние на характер переходных процессов при реверсе и торможении двигателя оказывает оставшееся магнитное поле, так как при отключении двигателя от сети его магнитный поток не может мгновенно снизиться до нуля. Наличие этого потока оказывает неблагоприятное воздействие на переходные процессы и вызывает увеличение максимальных переходных моментов двигателя при реверсе и торможении. Пики переходных электромагнитных моментов двигателя при пуске в 3-5, а при реверсе в 12-18 раз превышают номинальный момент двигателя.
Переходные процессы в двигателе описываются системой дифференциальных уравнений, которые по своей природе нелинейны и содержат периодические коэффициенты. Их решение для нахождения зависимостей Со(t) и M(t) обычно производится с помощью ЭВМ.
Механические переходные процессы в асинхронном ЭП описываются основным уравнением механического движения, в котором моменты двигателя и исполнительного органа в общем случае являются нелинейными функциями скорости (скольжения). Получение искомых зависимостей s(t), Со и M(t) может быть осуществлено несколькими путями.
Переходные процессы в системе «преобразователь частоты – асинхронный двигатель» (ПЧ–АД).
В системе ПЧ–АД могут быть сформированы переходные процессы, близкие по своему характеру к процессам в системе «управляемый выпрямитель – двигатель постоянного тока независимого возбуждения». Для этого используется задатчик интенсивности (задатчик скорости) 1 (рис. 2, а), который за счет формирования во времени сигнала управления U на входе ПЧ 2 при ступенчатом изменении сигнала задания скорости U позволяет получить требуемые графики изменения скорости и момента двигателя 3 в переходном процессе. Графики сигнала U и сигнала на выходе задатчика интенсивности приведены на рис. 2, б. Важно отметить, что реализуемое при этом плавное изменение частоты и величины напряжения позволяет также устранить влияние электромагнитных переходных процессов.
На рис. 2, в на плоскости механических характеристик показана траектория пуска, реверса и торможения вхолостую двигателя при линейном законе изменения частоты и тем самым скорости магнитного поля двигателя со0. Пуск двигателя соответствует участку 0ab, реверс – участку bed и торможение – участку de0 этой траектории. Отметим, что на участке торможения двигатель работает в генераторном режиме с рекуперацией (отдачей) энергии в сеть.
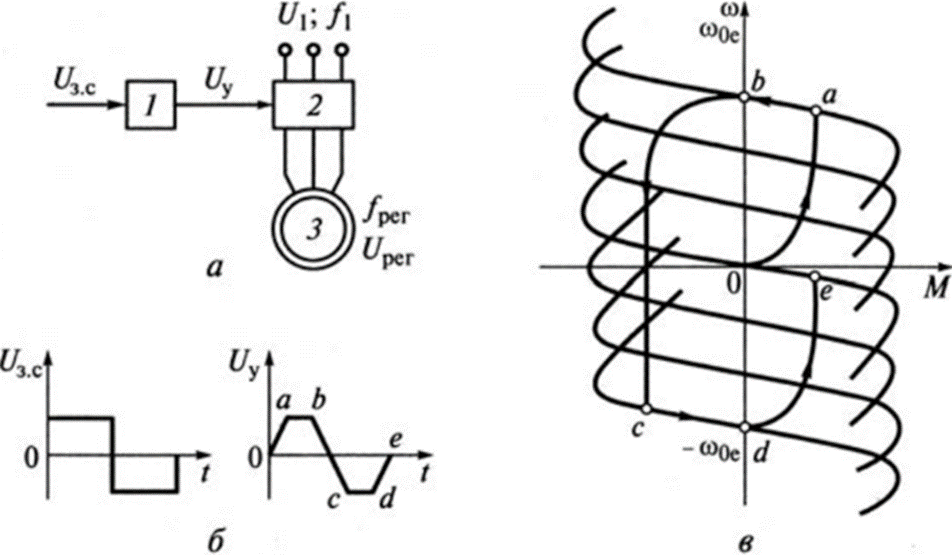
Рис. 2. Схема включения (а), графики сигналов управления (б) и характеристики (в) асинхронного двигателя при формировании переходных процессов: 1 – задатчик интенсивности; 2 – преобразователь частоты; 3 – двигатель
Для построения кривых переходного процесса Со и М могут быть использованы формулы для системы «преобразователь – двигатель», считаем при этом, что работа двигателя происходит на линейных участках его механических характеристик.
Формирование переходных процессов в системе «регулятор напряжения – двигатель». Как уже отмечалось выше, переходные процессы в асинхронном ЭП в общем случае сопровождаются значительными по амплитуде пиками переходного электромагнитного момента, что приводит к дополнительным динамическим усилиям в механической части ЭП и на исполнительном органе рабочей машины и может вызвать даже их поломку.
В тех случаях, когда нежелательно или недопустимо такое воздействие переходного электромагнитного момента, прибегают к формированию момента двигателя в переходных процессах. Оно достигается при использовании тиристорных регуляторов напряжения (ТРИ) за счет изменения скорости нарастания подводимого к двигателю напряжения или при определенной последовательности подключения его фазных обмоток. В результате могут быть получены плавные кривые переходных процессов, близкие к показанным на рис. 1, в.
Отметим также, что одновременно с получением желаемых графиков момента и скорости двигателя применение ТРИ позволяет обеспечить и ограничение токов в переходных процессах ЭП.
