
Вращающееся магнитное поле называют так потому, что в результате действия в пространстве нескольких неподвижных источников магнитной индукции (переменных токов), в сумме получается динамическая силовая картина аналогичная реальному вращению магнитного поля – результирующий вектор магнитной индукции вращается. Магнитные поля, создаваемые этими источниками, – переменные, они имеют одинаковую частоту, но отличаются друг от друга фазами.
Так, например, в асинхронных электродвигателях обмотки статора обычно питаются трехфазным током с разностью фаз в 120 градусов. Обмотки смещены в пространстве по отношению друг к другу, при этом каждая из обмоток выступает источником индивидуального пульсирующего магнитного поля в собственной фазе.
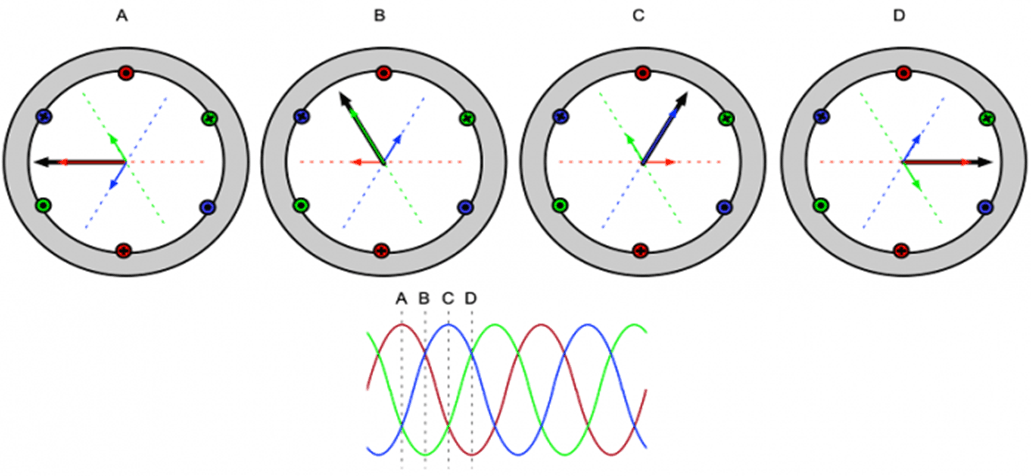
Рис. 1. Магнитные поля в обмотках статора
Результирующее магнитное поле имеет характер волны, бегущей по окружности статора в зазоре между статором и ротором. Волна бежит по окружности со скоростью, называемой синхронной.
Синхронная скорость зависит от частоты тока и от числа пар магнитных полюсов. Например, в асинхронном двигателе синхронная скорость, равная 3000 оборотов в минуту, достигается при частоте тока в 50 Гц с одной парой магнитных полюсов.
Идея применения вращающегося магнитного поля для работы электродвигателей принадлежит известному изобретателю сербского происхождения Николе Тесла (1856-1943). Это он в 1888 году прочитал лекцию о том, как с помощью системы трехфазных токов получить вращающееся магнитное поле.
Далее рассмотрим принцип получения вращающегося магнитного поля более внимательно на примере соединенных по схеме «звезда» обмоток статора асинхронного двигателя, предназначенных для питания трехфазным переменным током.
Приведенные формулы отражают мгновенные значения токов в обмотках трех фаз асинхронного двигателя.
Ниже на графиках токов видно, что когда ток фазы А находится в своем амплитудном значении, ток фазы В возрастает, а ток фазы С – уменьшается. Соответствующим образом изменяются и магнитные индукции от данных обмоток. Справа изображено взаимное расположение векторов магнитной индукции от каждой из «фаз» трехфазной обмотки.
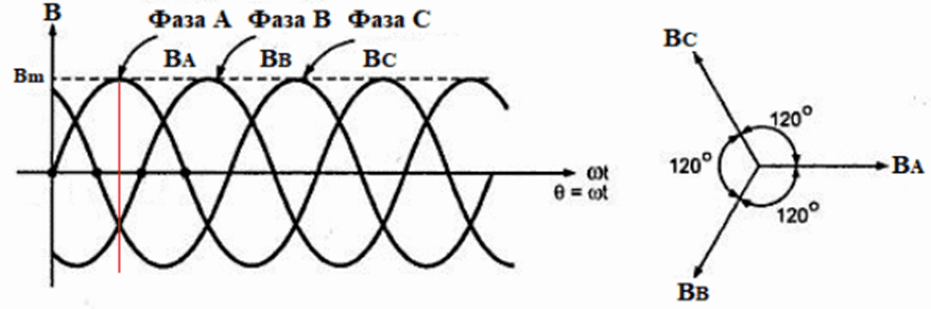
Рис. 2. Магнитная индукция в обмотках
Суммарный (результирующий) вектор магнитной индукции B поворачивается на угол в соответствии с частотой тока и моментом времени, и имеет амплитуду:

Если число магнитных полюсов обмотки статора равно двум (одна пара полюсов, обозначается как p = 1), то есть на каждую фазу тока имеется только одна индивидуальная обмотка, то за один период изменения суммарной магнитной индукции, поле (результирующий вектор магнитной индукции) совершит один полный оборот.
Если полюсов четыре (р = 2) – будет половина оборота за период. Если полюсов шесть (p = 3) – треть оборота за период. Восемь полюсов (p = 4) дадут четверть оборота за период.
Так, при частоте трехфазного тока f = 50 Гц, получим n = 3000, 1500, 1000 и 750 оборотов в минуту соответственно – синхронные скорости вращающегося магнитного поля. Отметим, что в данном случае обмотки в каждой фазе соединены между собой последовательно.
Когда дан двигатель с числом пар магнитных полюсов больше одной, то есть последовательно соединенных обмоток в каждой фазе имеется несколько, то, переключив обмотки каждой фазы с последовательного соединения на параллельное, получим меньшее число магнитных полюсов.
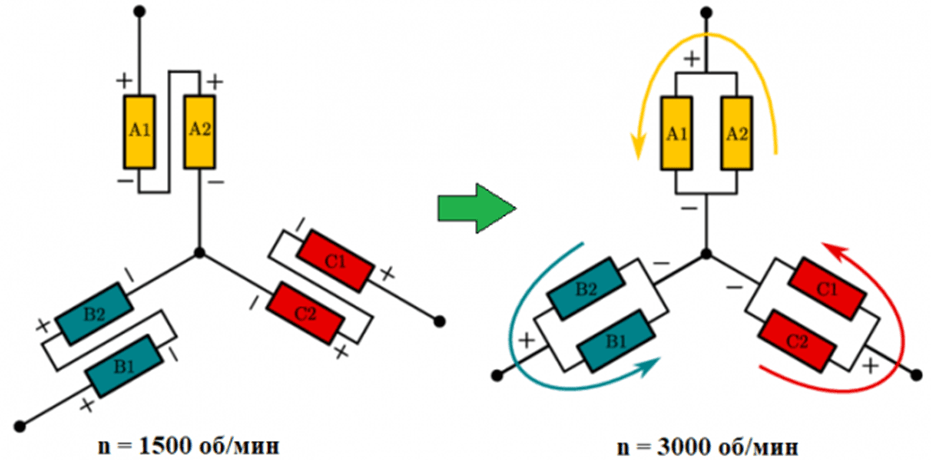
Рис. 3. Магнитные полюса двигателя
Соответственно, например, имея двигатель с синхронной скоростью поля в 1500 оборотов в минуту, из него можно сделать двигатель на 3000 оборотов в минуту, переключив соединение обмоток в каждой фазе с последовательного - на параллельное.
