Введение. Рассматривается в игровой постановке становке задача [1-10] оптимального управления по принципу обратной связи динамической системой, которая описывается векторным линейным дифференциальным уравнением. Особенность рассматриваемой задач – в неполноте информации о помехах, действующих на управляемый объект, а также запаздывании и неточной или искаженной информации о текущих состояниях управляемого объекта. Критерии качества процесса управления задаются в виде функционалов от движения объекта, управляющих воздействий и помех. Такие задачи занимают достаточно большое место среди задач управления в технике, экономике и т.д. Задача на минимакс выбранного критерия качества решается в рамках концепции, разрабатываемой в уральской школе по оптимальному управлению и дифференциальным играм Н.Н. Красовского [7, 8, 10]. Для построения оптимальной стратегии управления, используется метод экстремального сдвига [3, 6, 7, 10], предложенный автором [2].
Управляемый объект. Рассматривается объект, движение которого описывается обыкновенным векторным дифференциальным уравнением
 (1)
(1)
Здесь x – n-мерный фазовый вектор управляемого объекта; t – время, моменты времени начальный t0 и конечный ϑ зафиксированы; u– r-мерный вектор управления, υ– s-мерный вектор помехи. Точка над буквой обозначает производную по времени.
Вектор управления u и вектор помехи υ стеснены условиями
u∈P, υ∈Q, (2)
где P и Q – ограниченные замкнутые множества векторов, т.е. – компакты. Они определяют ресурсы соответственно управляющего органа U и органа V, вырабатывающего помехи в схеме управления по принципу обратной связи (рис.).
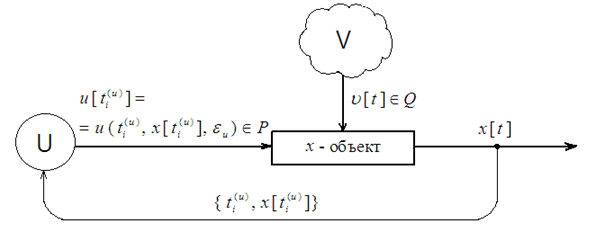
Рис. Схема управления по принципу обратной связи
Движение объекта (1), на отрезке времени [ti, t(i+1)]⊂[t0, ϑ], которое обозначили символом  порождается некоторыми управлениями
порождается некоторыми управлениями  и помехами
и помехами определены также как в работах [2, 3]. При этом в этих работах рассмотрена задача, когда информационным образом является позиция объекта {ti,x[ti]} и используется чистая позиционная стратегия
определены также как в работах [2, 3]. При этом в этих работах рассмотрена задача, когда информационным образом является позиция объекта {ti,x[ti]} и используется чистая позиционная стратегия  Здесь же, исходя их содержательного смысла рассматриваемой задачи управления при неполной информации не только о помехе, но и неточной запаздывающей информации о фазовых состояниях объекта, информационный образ, на базе которого будет формироваться стратегия управления, претерпевает существенные изменения. Он и будет играть ключевую роль в существовании оптимального решения рассматриваемой задачи.
Здесь же, исходя их содержательного смысла рассматриваемой задачи управления при неполной информации не только о помехе, но и неточной запаздывающей информации о фазовых состояниях объекта, информационный образ, на базе которого будет формироваться стратегия управления, претерпевает существенные изменения. Он и будет играть ключевую роль в существовании оптимального решения рассматриваемой задачи.
Критерий качества процесса управления. Будем рассматривать критерий качества (критерий оптимальности) процесса управления γ следующего вида

 (3)
(3)
Здесь x ̃ – некоторый фиксированный n -мерный вектор – цель, к которой мы стремимся привести объект (1), (2) выбором управления u[t] по принципу обратной связи (рис.). В (3) интегральные слагаемые определяют затраты энергии на выработку управляющих воздействий и помех, где ϕ(t) и ψ(t) суть заданные кусочно-непрерывные функции времени
t, ϕ(t)≤α, ψ(t)≤β, где α>0, β>0 – заданные числа.
Информационный образ. Будем рассматривать такой случай, когда информация о состояниях x[t] идет с запаздыванием и еще, вообще говоря, с искажением. Текущую информацию при t≥t0+h, где h>0 величина запаздывания, будем использовать в виде n-мерного вектора x* [t], где
 (4)
(4)
Начальное фазовое состояние x[t0]=x0 объекта также сообщается с искажением. Обозначим
x0*=x0+Δx*0. (5)
Целевое конечное фазовое состояние x ̃ также сообщается с искажением. Обозначим
x ̃^*=x ̃+Δx ̃^*. (6)
При этом величины x0* (5) и x ̃* (6) сообщаются нам заранее. Полагаем, что они известны уже в некоторый момент t ̃0<t_0, который уточним ниже. От момента времени t0 до момента времени t0+h управление  определяется лишь информацией об x0* и x ̃*. Начиная с момента времени t0+h, управление
определяется лишь информацией об x0* и x ̃*. Начиная с момента времени t0+h, управление  определяется еще и информацией об x* [t] (1.11). При этом, несмотря на содержательный смысл величин x0* и x* [t], вытекающий из (5), (6), не будем требовать, чтобы обязательно выполнялось равенство
определяется еще и информацией об x* [t] (1.11). При этом, несмотря на содержательный смысл величин x0* и x* [t], вытекающий из (5), (6), не будем требовать, чтобы обязательно выполнялось равенство
x* [t0+h]=x0*.
Информационным образом (элементом) Υ[t0] в начальный момент времени t=t0 называется пара
Υ[t0]={x0*, x ̃*}. (7)
Информационным образом (элементом) Υ[t] при t≥t0+h назовем совокупность компонент

 (8)
(8)
При этом при t∈[t0+h, ϑ] предполагается возможным запоминание истории и реализации выработанного управления
и реализации выработанного управления  .
.
В (8) y ̃[t0 [⋅]t)={y ̃[τ], t0≤τ<t} – (n+1) - мерная вектор-функция, такая, что  , где n-мерный вектор y складывается из первых n координат вектора y ̃.
, где n-мерный вектор y складывается из первых n координат вектора y ̃.
Положим
 (9)
(9)
 (10)
(10)
Согласно (9), (10), изменение во времени t переменных y[t]={y1 [t],…,yn [t]} и y ̃(n+1) [t] описывается дифференциальными уравнениями
 (11)
(11)
 (12)
(12)
с начальными условиями
y[t0]={0,…,0}, y ̃(n+1) [t0]=0. (13)
Назовем допустимыми в (8) кусочно-непрерывные функции x* [⋅] и в (1.11), (1.12) – измеримые, ограниченные (каждая своей постоянной) функции u[⋅].
Итак, информационные элементы Υ[t] (9) и (10) определяют информационную Υ-систему.
Запаздывание информации. Следуя [5], поясним содержательный смысл запаздывания использования информации. Величина h не есть, вообще говоря, только время запаздывания подачи информации о состояниях x[τ] в орган управления. Величина h – это суммарное время, которое складывается из времени h* запаздывания подачи информации в ЭВМ в органе управления, из времени h* на подсчет в ЭВМ значения u[t] управляющего воздействия и из времени h ̃ передачи u[t] на x-объект. Итак,

При этом полагаем
ti-t(i+1)≥h*, i=1,…, l-1,
где ti=tiu и t(i+1)=t(i+1)u – моменты из разбиения в схеме управления по принципу обратной связи (рис.).
Полагаем, что x0* и x ̃* известны уже при t ̃0=t0-h-h*. По постановке задачи полагаем, что в моменты времени  ,
,  по информации {x0*, x ̃*} начинается подсчет величины
по информации {x0*, x ̃*} начинается подсчет величины

и эта величина вычисляется в течение времени  Таким образом, в частности, величина u[t1 ] уже будет сосчитана в момент
Таким образом, в частности, величина u[t1 ] уже будет сосчитана в момент  . Полагаем, что в течение времени
. Полагаем, что в течение времени  вычисленное значение u[t] хранится в памяти. Затем за время
вычисленное значение u[t] хранится в памяти. Затем за время  вычисленное значение u[t] преобразуется в усилие u[t], t0<t≤t1 на x-объект. Разумеется, практически функция u[t], t0<t≤t1 полагается кусочно-постоянной
вычисленное значение u[t] преобразуется в усилие u[t], t0<t≤t1 на x-объект. Разумеется, практически функция u[t], t0<t≤t1 полагается кусочно-постоянной  с весьма малым шагом
с весьма малым шагом  , и, стало быть, практически вычисляются лишь значения
, и, стало быть, практически вычисляются лишь значения  .
.
В момент  в ЭВМ поступает новая информация
в ЭВМ поступает новая информация

Заметим при этом, что в момент времени τ*1=t1-h+h* функцию y ̃[t0 [⋅]t1] мы полагаем уже известной, т.к., согласно предыдущему, подсчет определяющей ее функции  заканчивается в момент t0, который наступает раньше, чем момент
заканчивается в момент t0, который наступает раньше, чем момент  .
.
По информации Υ[t1] за время  ЭВМ подсчитывает значение
ЭВМ подсчитывает значение  , где t1 и t2 – моменты из разбиения Δ{ti} (1.22), (1.34). Таким образом, вычисление величины u[t2] заканчивается в момент
, где t1 и t2 – моменты из разбиения Δ{ti} (1.22), (1.34). Таким образом, вычисление величины u[t2] заканчивается в момент  . Затем в течение времени
. Затем в течение времени  сосчитанное значение u[t], t1<t≤t2 хранится в памяти, и далее за время
сосчитанное значение u[t], t1<t≤t2 хранится в памяти, и далее за время  сосчитанное значение u[t], t1<t≤t2 преобразуется в управление u[t] на x-объект.
сосчитанное значение u[t], t1<t≤t2 преобразуется в управление u[t] на x-объект.
В момент  поступает новая информация
поступает новая информация
 .
.
При этом в момент τ*2=t2-h+h* функция y ̃[t0 [⋅]t2] полагается уже известной, т.к. подсчет в ЭВМ функции u[t0 [⋅]t2) заканчивается в момент  и
и  .
.
Процесс продолжается по индукции по i. Пусть в момент τ*i=ti-h+h*, i=3,…, l-1 поступила информация

При этом предполагаем, что к моменту τ*i функция y ̃[t0 [⋅]ti] уже сосчитана, т.е. уже сосчитана функция u[t0 [⋅]ti). В момент τ*i по информации Υ[ti] (1.37) начинается подсчет величины u[t], ti<t≤t(i+1), который длится в течение времени  Таким образом, в момент
Таким образом, в момент  заканчивается подсчет функции
заканчивается подсчет функции  . Далее в течение времени
. Далее в течение времени  сосчитанное значение u[t], ti≤t<t(i+1) хранится в памяти, и затем за время
сосчитанное значение u[t], ti≤t<t(i+1) хранится в памяти, и затем за время  оно преобразуется в управление u[t] на x-объект. При этом в момент τ*i+1=ti+1-h+h* можно снова начинать считать величину u[t], ti+1≤t<ti+2. Для этого в момент τ*i+1 необходимо иметь следующую информацию
оно преобразуется в управление u[t] на x-объект. При этом в момент τ*i+1=ti+1-h+h* можно снова начинать считать величину u[t], ti+1≤t<ti+2. Для этого в момент τ*i+1 необходимо иметь следующую информацию

Такая информация в момент τ*i+1 имеется. В самом деле, величина x* [t0+h[⋅]ti+1] становится известной в этот самый момент τ*i+1, а функция y ̃[t0 [⋅]t(i+1)] становится известной в момент окончания вычисления функции u[t0 [⋅]t(i+1)], т.е. в момент  , а с учетом (1.34) имеем
, а с учетом (1.34) имеем  .
.
Оптимальная стратегия. Назовем пару {ti, Υ[ti]}, состоящую из момента времени ti и информационного образа Υ[ti], информационной позицией Υ-системы в схеме управления по принципу обратной связи (рис., при замене  на
на ).
).
Для построения оптимальной чистой позиционной стратегии управления u0 (⋅)=u0 (t,Y,ε) используется метод экстремального сдвига на сопутствующие точки, изложенный в работах [2-6, 10].
Теорема. Построенная чистая позиционная стратегия управления u0 (⋅)=u0 (t,Y,ε) является оптимальной стратегией для рассматриваемой задачи конфликтного управления для линейной динамической системы (1) с критерием качества процесса управления γ (3).
Доказательство этого утверждения повторяет с понятными изменениями, связанными с заменой информационных образов, конструкции из работ [2-6, 10].
