
Введение. Выдающийся профессор электротехники и вычислительной техники, эксперт в области систем управления, посвятивший 50 лет обучению нескольких поколений инженеров в Университете Алабамы в Хантсвилле (UAH), К. Д. Джонсон был всемирно известен благодаря своей теории управления с учетом возмущений [5, c. 254-407], которую он разработал и применил к аэрокосмическим системам, представляющим интерес для многих компаний и правительственных учреждений. В классификации сигналов дополнительно к случайным и детерминированным он ввёл понятие «сигнал волновой структуры» (СВС).
СВС – это сумма аналитических функций с весовыми коэффициентами, изменяющимися в случайные моменты времени. Оказалось, что если в качестве аналитических функций выбрать степени времени
 , (1)
, (1)
то для оценки СВС можно использовать Наблюдатель Люенбергера [4, c. 210].
В тех случаях, когда возмущения, действующие на объект, являются СВС, разработаны регуляторы [2], обеспечивающие полное парирование помехи и астатизм без интеграторов, вводимых внутрь замкнутого контура обратной связи.
В настоящей работе используются регуляторы [1], обеспечивающие эффективное управление объектами с неизвестным математическим описанием и проводится сопоставление регулятора ADRC с методом модального синтеза.
Сигнал волновой структуры. При классификации сигналов вводится сигнал волнового типа [5, с. 254; 6, с. 341] и в дальнейшем рассматриваются только такие возмущения, действующие на объект. В [1, c. 3] при использовании регуляторов ADRC, рассматриваются объекты с неизвестным математическим описанием. В этом случае СВС используется для введения виртуального вектора состояния.

Рис. 1. Виртуальный вектор состояния
Этой схеме соответствует векторно-матричное уравнение состояния СВС:
 (2)
(2)
где матрица динамики волнового сигнала:
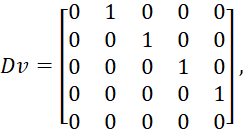 (3)
(3)
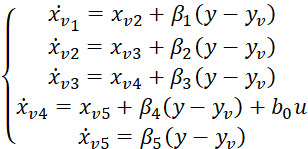
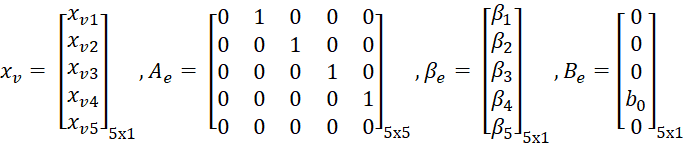
Теория регулятора ADRC. При использовании метода ADRC как было сказано выше, динамика объекта, внешнее возмущение, шум измерения описываются как СВС. Общий алгоритм построения ADRC для системы высокого порядка показан в [1, с. 2]. В данной статье рассматриваем построение ADRC для объекта «Шар на плате» четвертого порядка, тогда в соответствии с [1] уравнения виртуального объекта имеют вид:
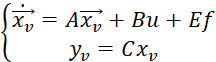 , (4)
, (4)
где:
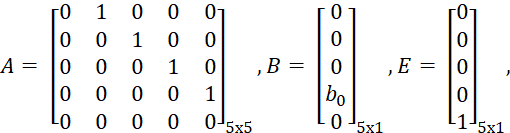 (5)
(5)

Е является матрицей возмущения. Мы рассматриваем «Шар на плате» как объект с неизвестным математическим описанием. Но на этапе моделирования объект представлен правдоподобным описанием:
с матрицами
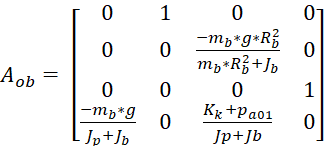 ;
;  ;
;  (6)
(6)
Наблюдатель виртуального состояния синтезирован следующим образом:
 , (7)
, (7)
где  – коэффициенты невязки наблюдателя. Это обычный наблюдатель Люенбергера, только в данном случае, порядок системы четыре, а порядок наблюдателя пять, поэтому он называется «расширенным» наблюдателем состояния. Модальный и ADRC регуляторы используют наблюдатель для восстановления координат состояний объектов. В отличие от наблюдателя Люенбергера, где используется математические модели объекта, наблюдатель ADRC используют волновые модели объекта.
– коэффициенты невязки наблюдателя. Это обычный наблюдатель Люенбергера, только в данном случае, порядок системы четыре, а порядок наблюдателя пять, поэтому он называется «расширенным» наблюдателем состояния. Модальный и ADRC регуляторы используют наблюдатель для восстановления координат состояний объектов. В отличие от наблюдателя Люенбергера, где используется математические модели объекта, наблюдатель ADRC используют волновые модели объекта.
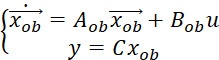
В матричном виде:
 , (8)
, (8)
где:
 , (9)
, (9)
 – оценка возмущения.
– оценка возмущения.
На рисунке 2 приведена структурная схема наблюдателя виртуального состояния.
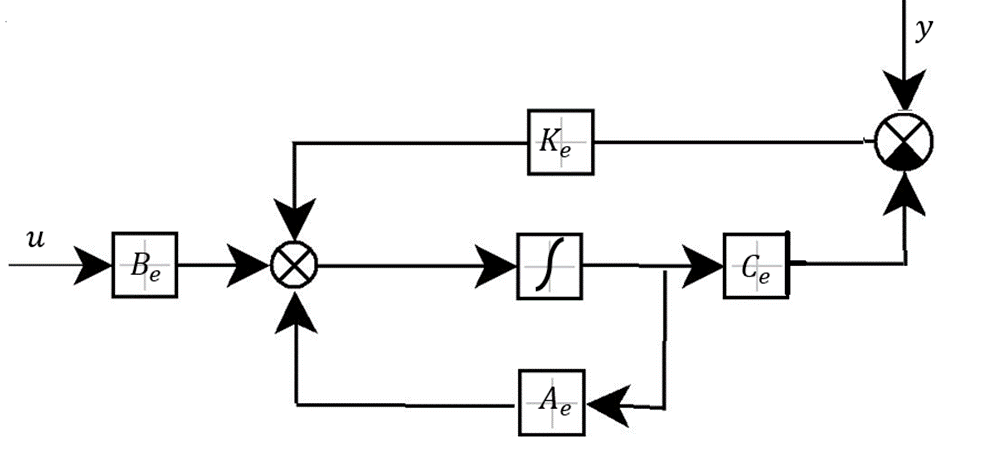
Рис. 2. Наблюдатель виртуального состояния
Закон управления по [1]:
 , (10)
, (10)
где  – матрица коэффициентов усиления регулятора (англ. controller gain),
– матрица коэффициентов усиления регулятора (англ. controller gain),  – вектор управления. В Simulink для формирования вектора управления используем наблюдатель командного сигнала, представляя командный сигнал, как волновой сигнал 4 порядка.
– вектор управления. В Simulink для формирования вектора управления используем наблюдатель командного сигнала, представляя командный сигнал, как волновой сигнал 4 порядка.
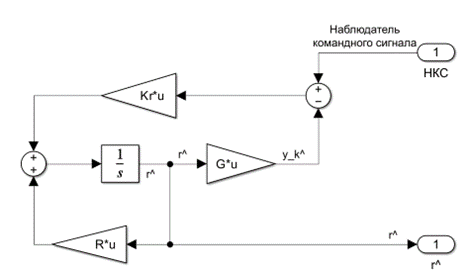
Рис. 3. Наблюдатель командного сигнала
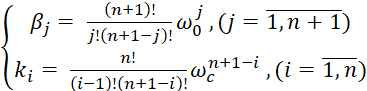
Как в [1] было показано, коэффициенты усиления наблюдателя и регулятора вычисляются через полосы пропускания регулятора и наблюдателя следующим образом:
 , (16)
, (16)
где n – порядок системы, ω0 – полоса пропускания наблюдателя, ωc – полоса пропускания регулятора. βj и ki не что иное, а биномы Ньютона (ω0+1)5 и (ωс+1)4.
Синтез систем управления. Необходимо подобрать всего 3 параметра b0,ω0,ωc, так как коэффициенты невязки наблюдателя и коэффициенты усиления регулятора базируются на этих трех параметрах. Для подбора параметров используется блок автоматического поиска Matlab Check Step Response. Настроим параметры данного блока следующим образом: Final Value = 0.2 (м, уставка), Rise Time = 2.5 (время нарастания), Setting Time = 3 (время регулирования), Overshoot = 10 % (перерегулирование), остальные параметры оставим по умолчанию. Управляющее воздействие является напряжением, поставим на него ограничение ±2.5 В. Также поставим ограничение на изменение скорости входного сигнала Rising slew rate и Falling slew rate ±0.1. Возмущение в радианах добавлено к углу наклона платы, его график на рисунке 4 ниже.
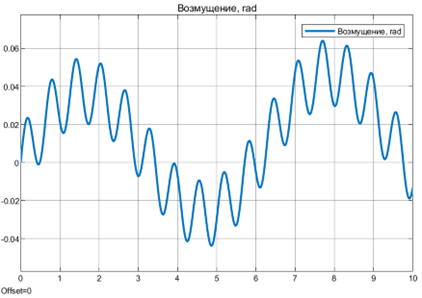
Рис. 4. Возмущение, приведенное к углу наклона платы
Реализованная структурная схема системы управления показана на рисунке 5.
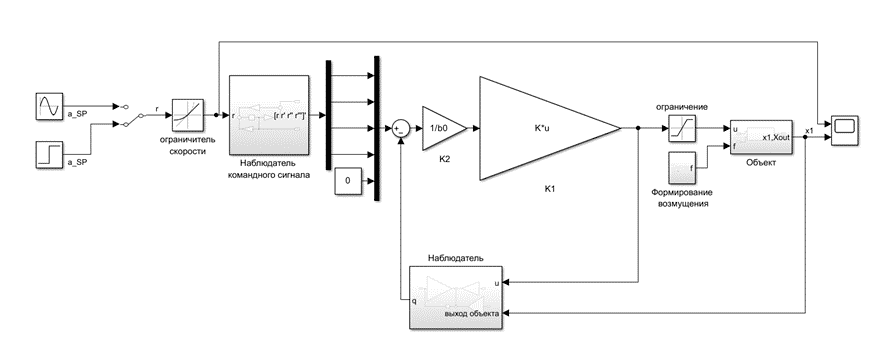
Рис. 5. Структурная схема системы управления
С помощью метода оптимизации Gradient descent в блоке Check Step Response были подобраны коэффициенты регулятора: b0=34. 9914, ω0=580.363, ωc=3.2153.
Промоделируем синтезированную систему управления с настроенными коэффициентами, для сигнала уставки, показанного на рисунке 6 синим цветом. Красным цветом показан выход объекта – координат шара. На рисунке 6а представлена реакция системы управления без внешнего возмущения на объект, а на рисунке 6б представлена реакция системы управления с возмущением в соответствии с рисунком 4.
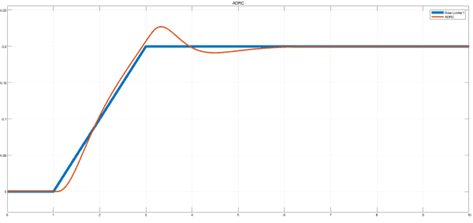
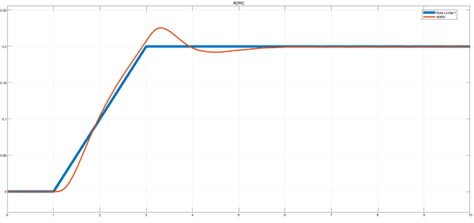
Рис. 6. Переходный процесс с подобранными параметрами: а) без возмущения б) с возмущением
Реализованное выше возмущение не оказывает визуального сильного воздействия на переходный процесс системы управления.
Определим критерии качества переходного процесса с 5 % дельта-трубкой:
- Перерегулирование:

- Время регулирования 2.7 с.
Для переходного процесса на рисунке 6, ADRC регулятор формируют управляющий сигнал на рисунке 7.
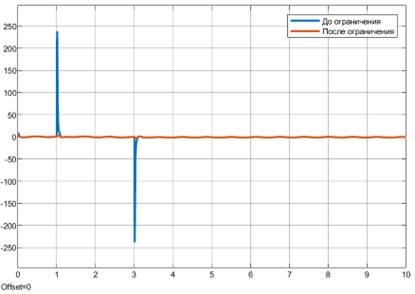
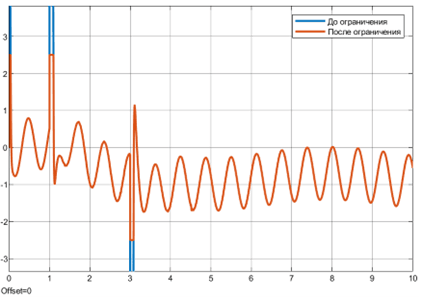
Рис. 7. Управляющее воздействие: а) в полном масштабе; б) в увеличенном масштабе
Как видно из графиков управляющего сигнала, при резком изменении сигнала уставки, регулятор формирует большие выбросы управляющего сигнала. Но на входе объекта стоит ограничитель сигнала ±2,5 В, что не отражается на качестве процессов.
При формировании уставки необходимо учитывать, что система управления не терпит резких ее изменений, так как при резком изменении данного сигнала, система управления может стать неустойчивой.
Сравнения модального регулятора и ADRC. Сравним системы управления «Шар на плате» с ADRC и с модальным регулятором. Как видно из рисунка 8, качество переходного процесса у обеих систем удовлетворительное. У модальной системы управления время регулирования больше, а перерегулирования меньше, чем у ADRC.
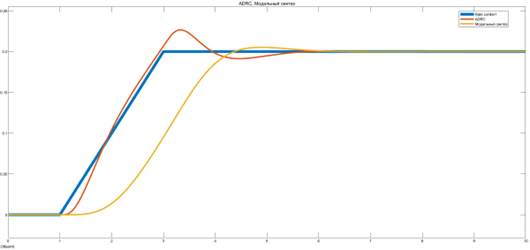
Рис. 8. Переходный процесс при ADRC и модальном регуляторах
На рисунке 8 уставка показана синим цветом; ADRC красным; модальный регулятор желтым цветом.
На рисунке 9 представлены переходные процессы тех же систем управления с внешним возмущением (рис. 4), добавленным к углу наклона платы.
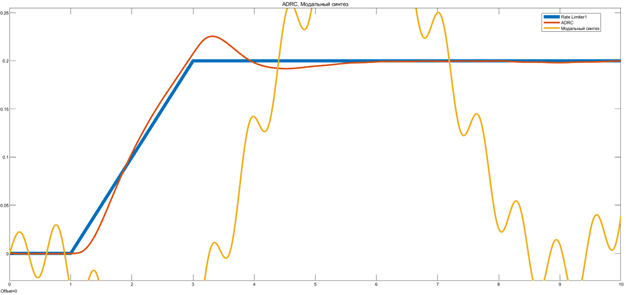
Рис. 9. Переходные процессы ADRC и модальном регуляторах с возмущением
Как видно из рисунков 8 и 9 при наличии возмущения система управления с ADRC сохраняет нормальное качество работы регулятора, в то время как модальная система становится неработоспособной.
Заключение. Регулятор ADRC имеет схожую идею в построении системы управления с модальным, и, в особенности, с волновым регулятором, приспосабливающимся к возмущению. В каждом из трех регуляторов присутствует наблюдатель, который на основе данных, полученных от объекта управления, оценивает различные сигналы. В модальном регуляторе – это оценки координат состояния объекта; в регуляторе, приспосабливающемся к возмущениям – это оценки координат состояния объекта и внешнего возмущения; а в ADRC – это оценки координат состояния объекта, с предполагаемым математическим описанием волновой структуры. ADRC оценивает производные выходной координаты объекта управления.
Волновой регулятор, приспосабливающийся к возмущению, использует волновое представление возмущения, а ADRC использует волновое представление состояния объекта, компенсирующее отсутствие математического описания.
В результате сравнения модального и ADRC регуляторов было получено, что модальный регулятор неработоспособен при внешнем волновом возмущении, в то время как системы управления с ADRC практически не замечают точно такие же возмущения.
В будущем необходимо провести аналогичное исследование цифрового варианта с ADRC.
